CONSTRUYENDO UN ROBOT 100% JAVASCRIPT
Jon Rojí Taboada - Codemotion 2017

Jon Rojí Taboada
@jnroji
Frontend Reference Leader
Angular teacher


geeks
hype
is real



can do a lot of useful things!
AND... OTHER THINGS NOT SO USEFULL...
fuck it
lets make
a robot
lets build it
first!
Select a main board
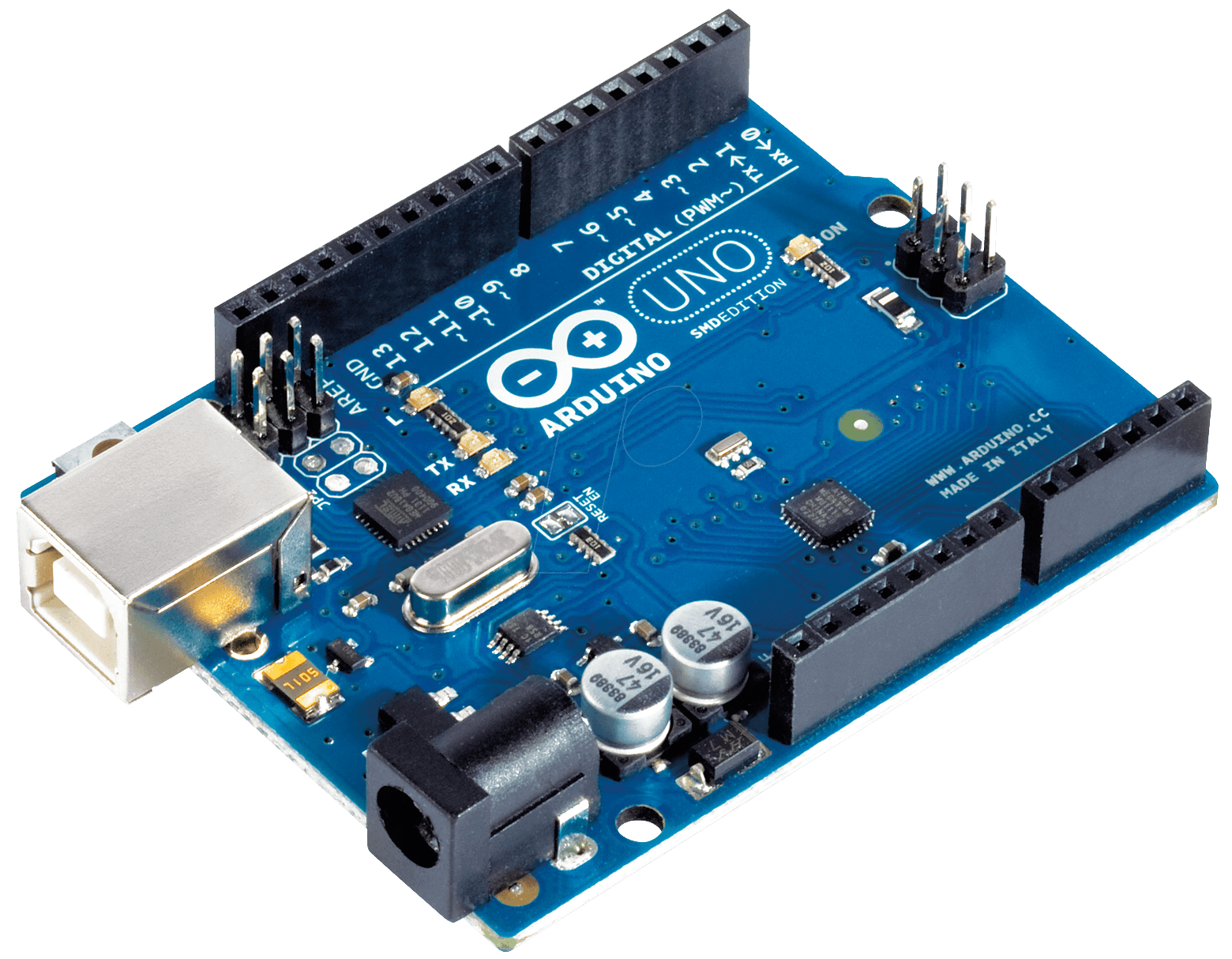
EaSY TO CONNECT
MULTIPLE ANALOGIC AND DIGITAL I/O
greaT community
ALL THE CODE YOU NEED IS ON INTERNET
lower capabilities
NOT GREAT AT BIG CALCULATIONS
And a restricted Arduino's environment
arduino
arduino
multiple modules
CAMERA, BLUETOOTH, ETC...
greaT community
ALL THE CODE YOU NEED IS ON INTERNET
great capabilities
CAN DO HEAVIER TASKS
And can do whatever you want
raspberry pi
ODROID
NANOPC
MINOWBOARD
BEAGLEBONE
BANANA PI
CUBIEBOARD
. . .
the no js parts
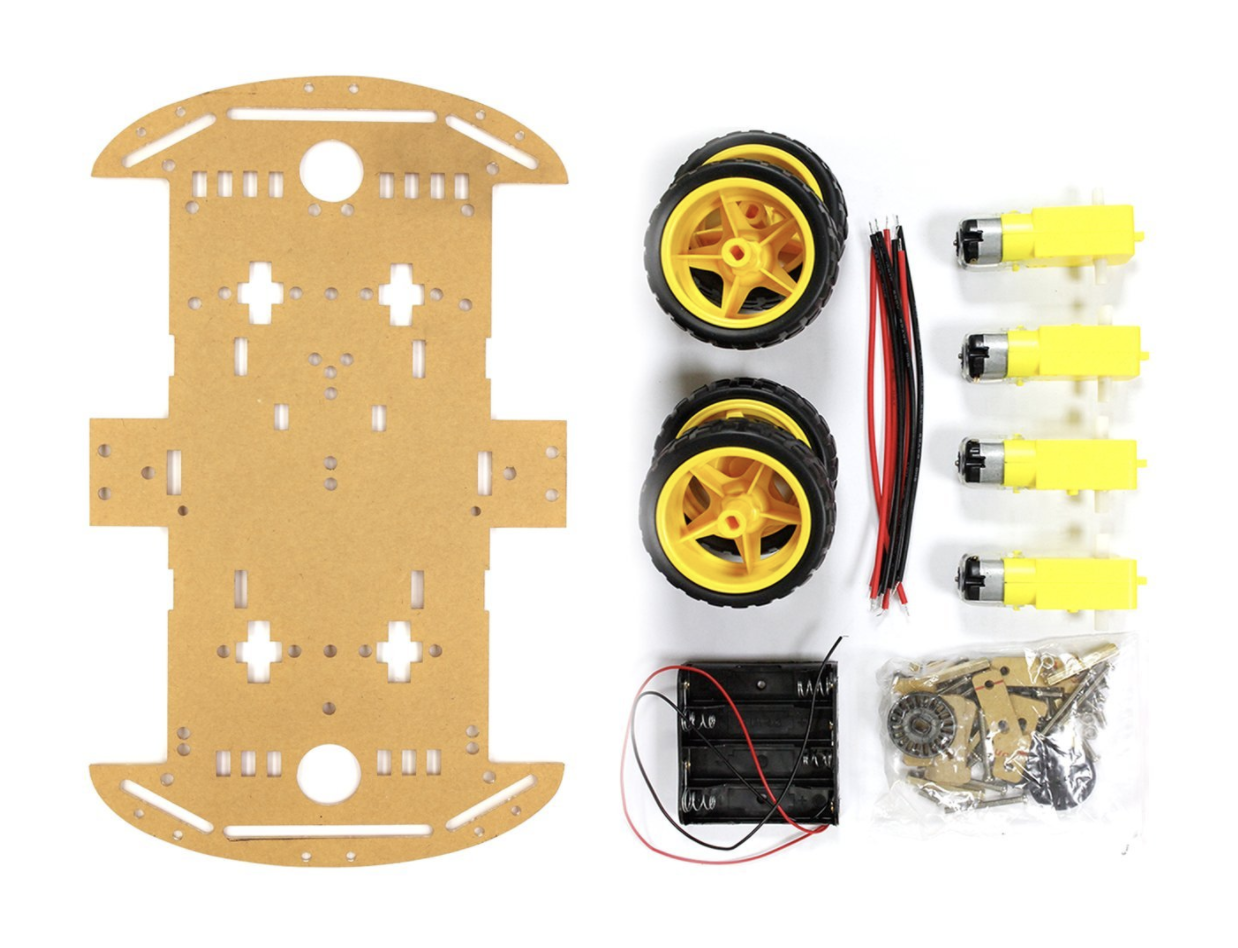
- Chasis
- 4 x DC Motor
- 4 x Wheels
- Battery module
13.99 €
things we need

things we need
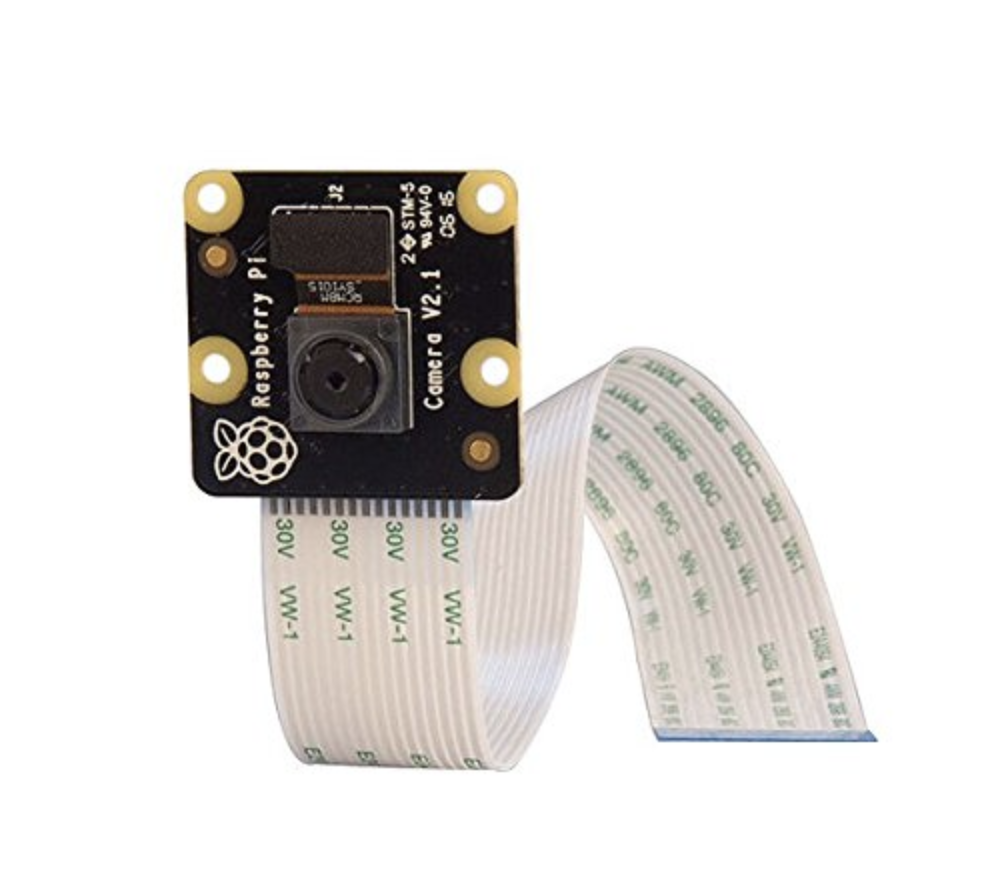
- Webcam
- Raspi Cam Module
13.99 € / 29.90 €
things we need
things we need
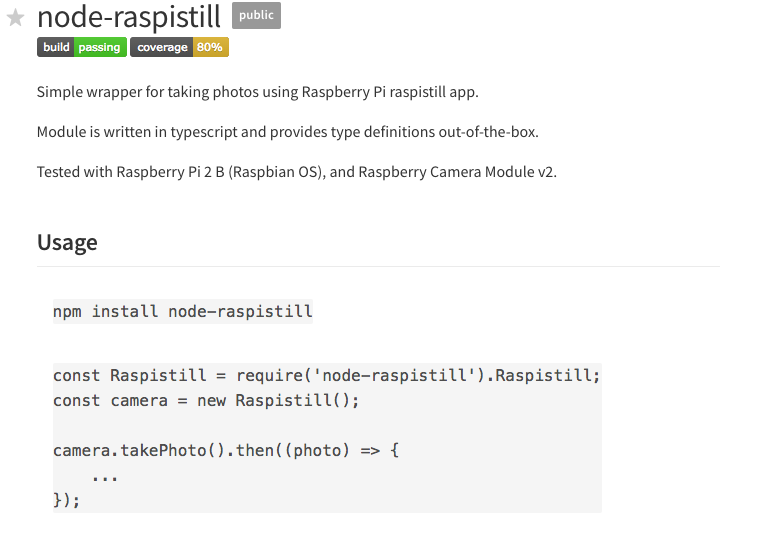
const Raspistill = require('node-raspistill').Raspistill;
...
class ImageAnalyzer {
constructor() {
this.camera = new Raspistill({
fileName: 'test',
verticalFlip: true,
width: 640,
height: 480
});
}
...
async capture() {
let photo = await this.camera.takePhoto();
}
...
}things we need
- L298N Motor controller
5.99 €
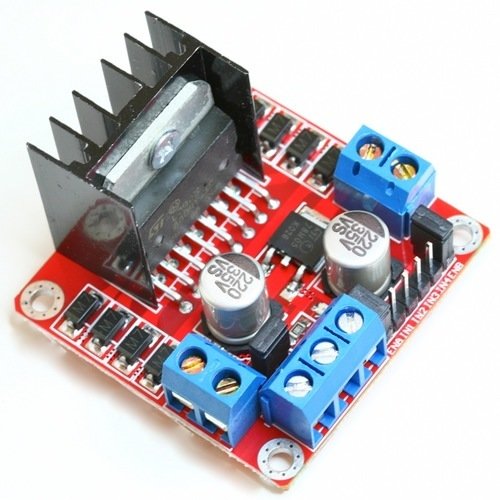
GPIO (General Purpose Input/Output) refers to a generic pin in a chipset and whose behaviour can be programmed by the user
things we need
things we need
things we need
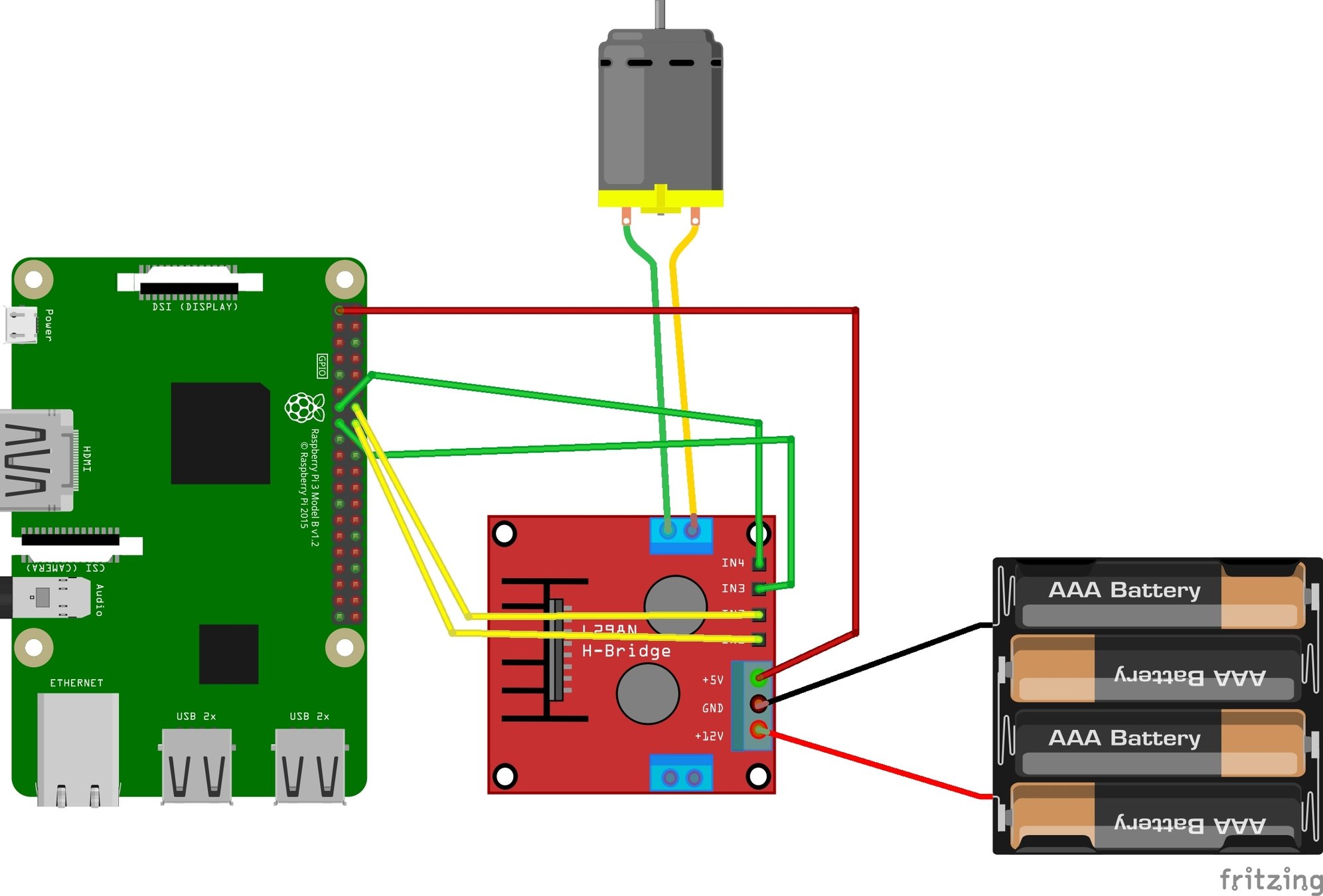
// SET MOTOR PINS
const motors = {
leftFront: 16,
rightFront: 18
};
// SET PINS I/O MODE
async.parallel([
(callback) => { gpio.setup(motors.leftFront, gpio.DIR_OUT, callback); },
(callback) => { gpio.setup(motors.rightFront, gpio.DIR_OUT, callback); },
], goForward);
// SEND 1
goForward() {
async.parallel([
(callback) => { gpio.write(this.motors.leftFront, true, callback)},
(callback) => { gpio.write(this.motors.rightFront, true, callback)}
], callback);
}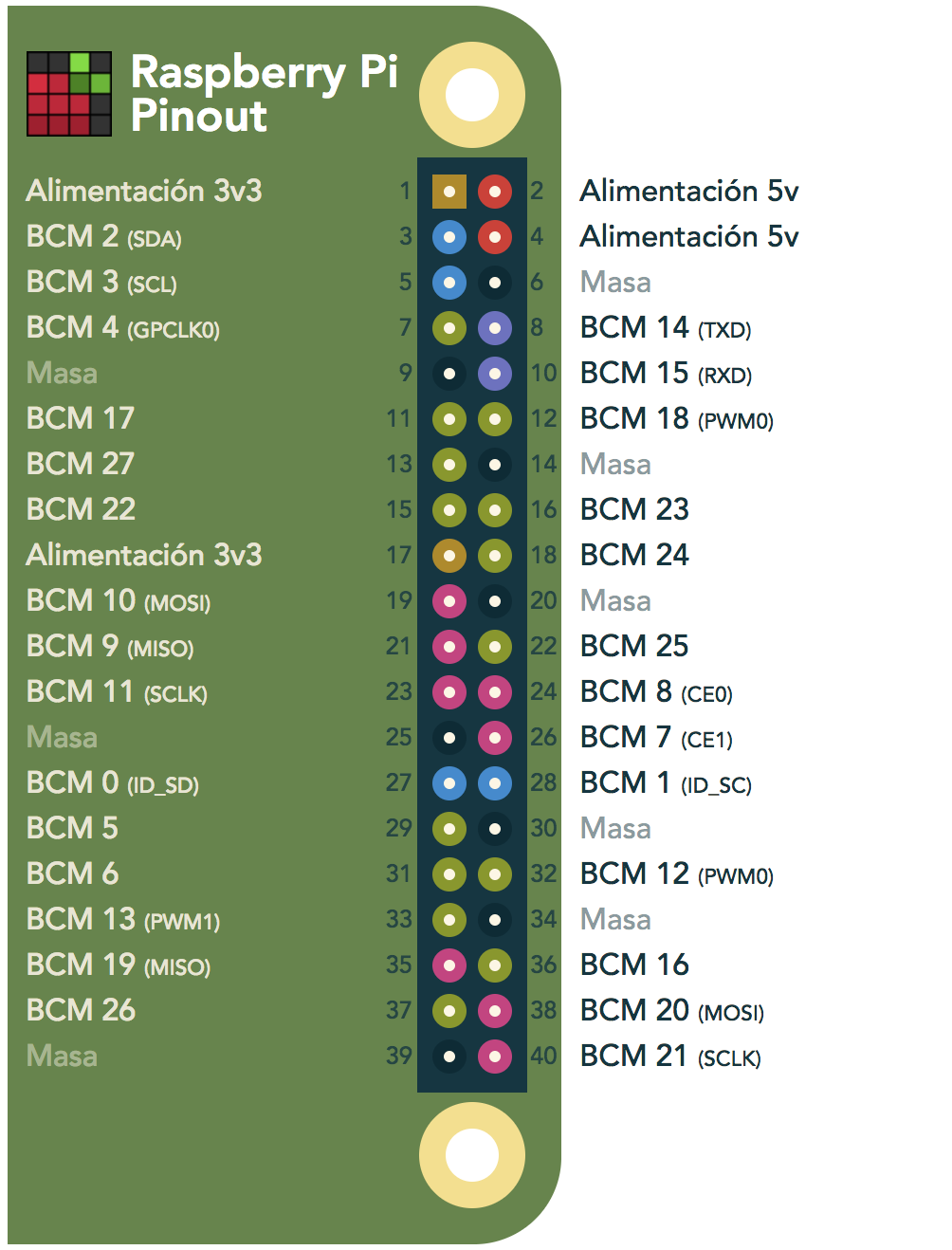
https://pinout.xyz/
Raspberry Pi Pinout guide
things we need

things we need
the js parts
Have to move by remote control
Have to send images
Have to interact with the world
WHAT I NEED?

remote control
remote control

remote control
remote control
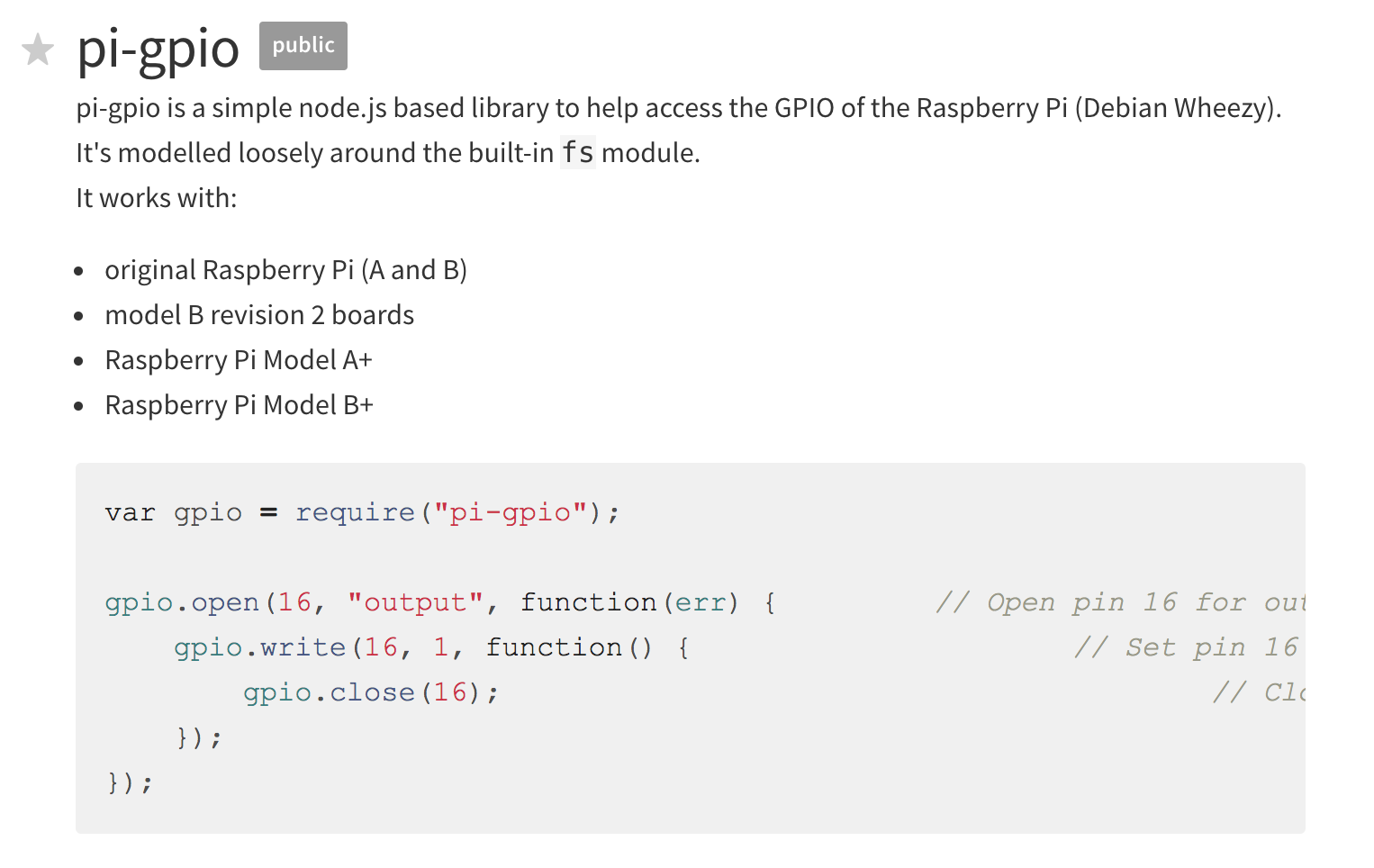
RPI-GPIO

class Robot {
constructor(firebaseRef) {
if (!firebaseRef) {
firebase.initializeApp(CONFIG.firebase);
firebaseRef = firebase.database().ref('orders');
}
this.direction;
this.motors = this.initPins();
this.firebaseRef = firebaseRef;
this.listenOrders();
}
listenOrders() {
this.firebaseRef.on('value', (snapshot) => {
const direction = snapshot.val().direction;
this.updateDirection(direction);
});
}
....remote control
initPins() {
const motors = {
leftFront: 16,
leftBack: 13,
rightFront: 18,
rightBack: 15
};
async.parallel([
(callback) => { gpio.setup(motors.leftFront, gpio.DIR_OUT, callback); },
(callback) => { gpio.setup(motors.leftBack, gpio.DIR_OUT, callback); },
(callback) => { gpio.setup(motors.rightFront, gpio.DIR_OUT, callback); },
(callback) => { gpio.setup(motors.rightBack, gpio.DIR_OUT, callback); },
]);
return motors;
}
goForward() {
async.parallel([
(callback) => { gpio.write(this.motors.leftFront, true, callback)},
(callback) => { gpio.write(this.motors.rightFront, true, callback)}
]);
}remote control

WHAT I NEED?
Have to move by remote control
Have to send images
Have to interact with the world
sending images
(Not selected solution)
sending images
?
sending images
Headless Chrome Node Api
sending images
const browser = await puppeteer.launch({
headless: true,
args: [
"--allow-running-insecure-content",
"--ignore-certificate-errors",
"--use-fake-ui-for-media-stream",
"--unsafely-treat-insecure-origin-as-secure"
],
userDataDir: "/Users/jroji/tmp/puppeteer/Chrome",
});await page.goto('https://appr.tc/r/910993264', {
waitUntil: 'networkidle'
});
await page.click("#confirm-join-button");sending images
sending images
STORAGE
sending images

sending images
WHAT I NEED?
Have to move by remote control
Have to send images
Have to interact with the world

interacting
A world of sensors
Humidity
Distance
Temperature
Motion
...
interacting
interacting
interacting
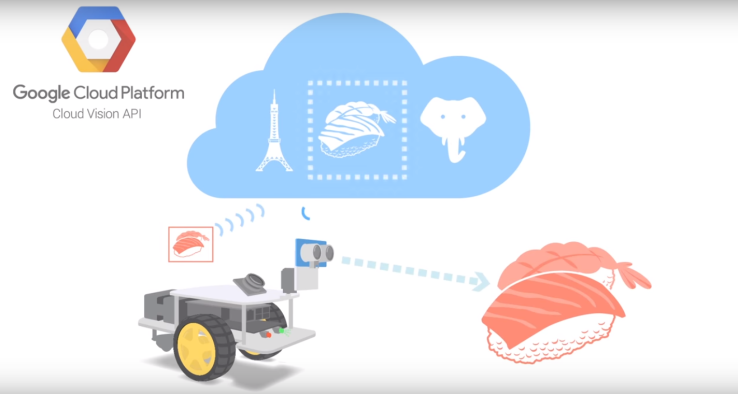
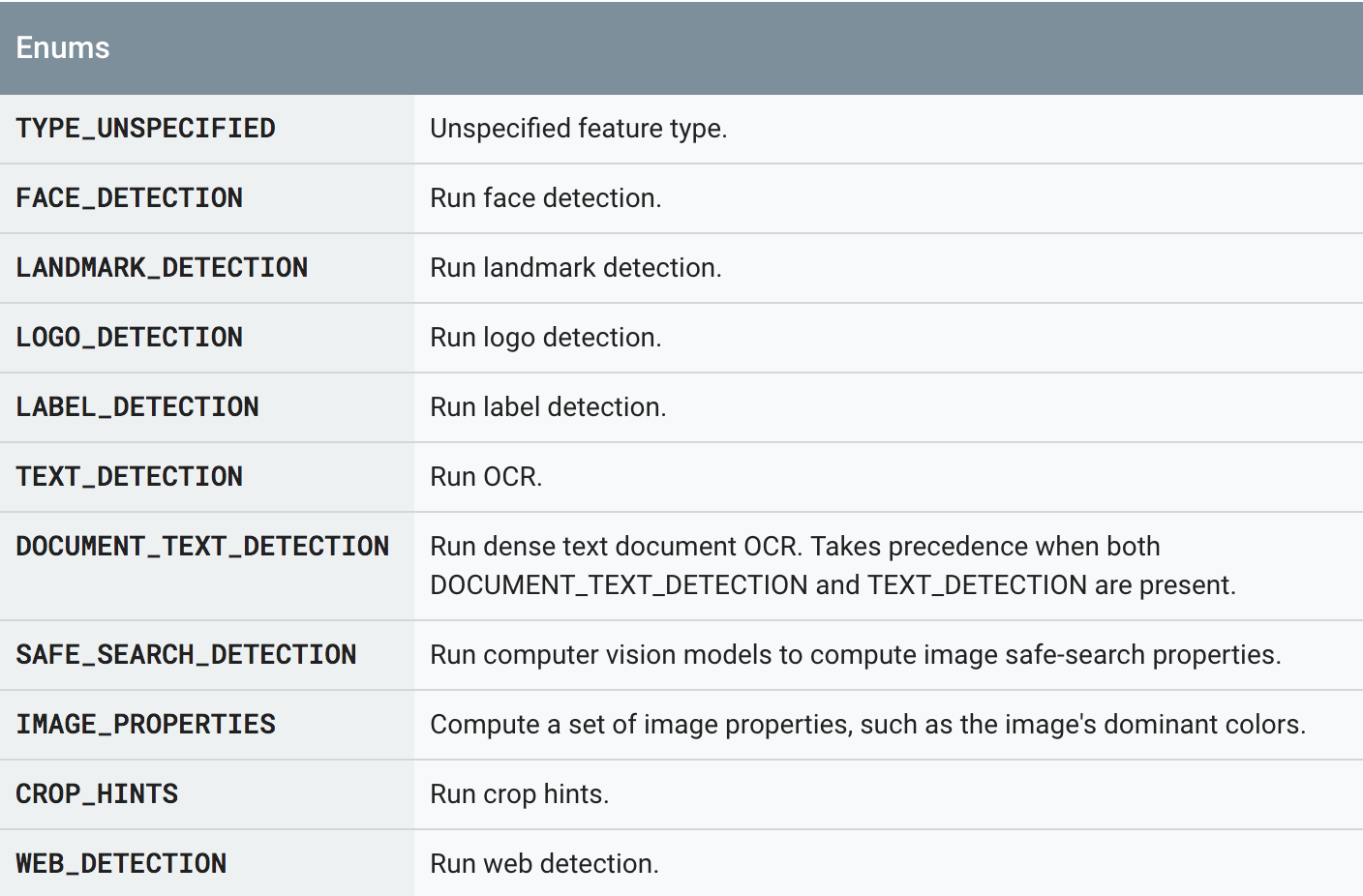
Google Cloud Platform API KEY
Google Vision API
interacting
interacting
interacting
/**
* Construct request body for the petition
* @param {string} image
* @param {string} type
*/
constructRequest(image = this.imageURI, type = 'LABEL_DETECTION') {
return {
"requests": [
{
"features": [
{
// TYPE OF THE DETECTION, LABEL BY DEFAULT
"type": type
}
],
"image": {
"source": {
// IMAGE TO BE ANALYZED
"imageUri": image
}
}
}
]
};
}
}
storage

interacting

Banana
interacting
Have to move by remote control
Have to send images
Have to interact with the world
WHAT I NEED?
Have to move by remote control
Have to send images
Have to interact with the world
DEMO
TIME!
Just in case...
Chromium and Raspberry Arch limitations
Care with voltage difference
Low quality of some components
https://github.com/jroji/raspibot
deal with it
other options
Files upload
Image / Video recognition
https://es.pinout.xyz/
https://github.com/mirceageorgescu/raspi-tank-2
https://diyhacking.com/control-a-dc-motor-with-an-l298-controller-and-raspberry-pi/
https://github.com/jroji/raspibot
https://amazon.es
references
thank
YOU
https://github.com/jroji/raspibot