Teleoperating Robots
Justin Wright
CS 4331-02
Developed by MIT’s Computer Science and Artificial Intelligence Laboratory
Components
- Oculus Rift/HTC Vive
- Multiple Sensor Displays
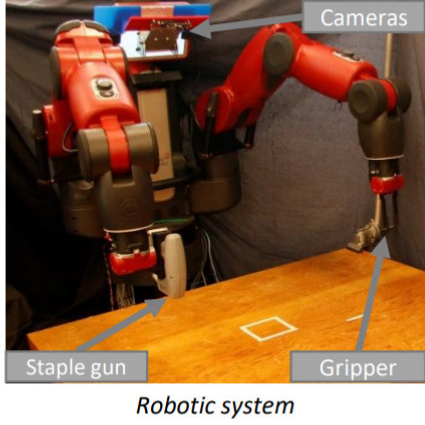
- Baxter humanoid robot from Rethink Robotics

- Remote operation of manufacturing equipment
- "By teleoperating robots from home, blue-collar workers would be able to tele-commute..." - CSAIL postdoc Jeffrey Lipton
Applications

Direct Model
- User's vision is directly coupled to the robot's state
Delayed signal could lead to nausea and headachesUser’s viewpoint is limited to one perspective
Cyber-Physical Model
User is separate from the robot- The user interacts with a virtual copy of the robot and the environment
- Requires much more data, and specialized spaces
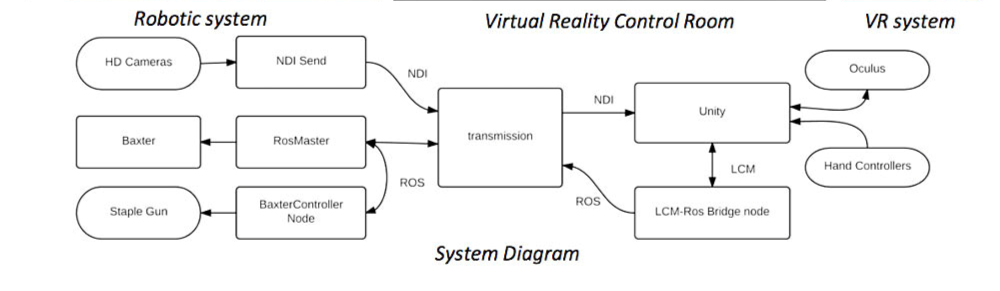
Teleoperation Design
How it Works
- Provides a sense of co-location by mapping human’s space into the virtual space, and the virtual space is then mapped into the robot space
- Takes the 2-D images that are displayed to each eye instead of extracting 2-D information from each camera, building out a full 3-D model of the environment, and then processing and redisplay the data

Cool Features
- Allows user to feel like they are "inside the robot's head"
- Robotic performance with a human touch
- "Gameifying" manufacturing processes
- Ability to perform precise actions
- Works from hundreds of miles away

Strengths
- Better performance than competition (grasping 95% more of the time than competition, 57% faster at task completion)
- Scalable and extendable with proper environment
- Breaking ground in new teleoperation approach
Weaknesses
- Early stages
- Costly to implement
- Cumbersome due to sensor data
Sickness
3-4
Low degree of simulator sickness
Related Products
- General manufacturing, machinery meant for predefined tasks
- Robotic arm operation assistance, small skill-set prone to malfunction


Future Applications/Conclusion
- Potential expansion to any manual task
- Look forward to further progress and development
- Particularly interested in seeing where the new approach leads(first person view, combination of direct and cyber-physical model)
References
- http://news.mit.edu/2017/mit-csail-new-system-teleoperating-robots-virtual-reality-1009
- https://thenewstack.io/human-workers-can-control-robots-virtual-reality-home/
- https://inhabitat.com/baxter-the-humanoid-robot-promises-to-revive-us-manufacturing/
- https://www.techadvisor.co.uk/review/wearable-tech/htc-vive-vs-oculus-rift-comparison-review-2016-3641088/