Relative stability toward diffeomorphisms indicates performance in deep nets
Leonardo Petrini, Alessandro Favero, Mario Geiger, Matthieu Wyart
Theory of Neural Nets, Internal Seminar July 12, 2021
Physics of Complex Systems Lab, EPFL
Introduction
Motivation: the success of deep learning (i)
- Deep learning is incredibly successful in wide variety of tasks
-
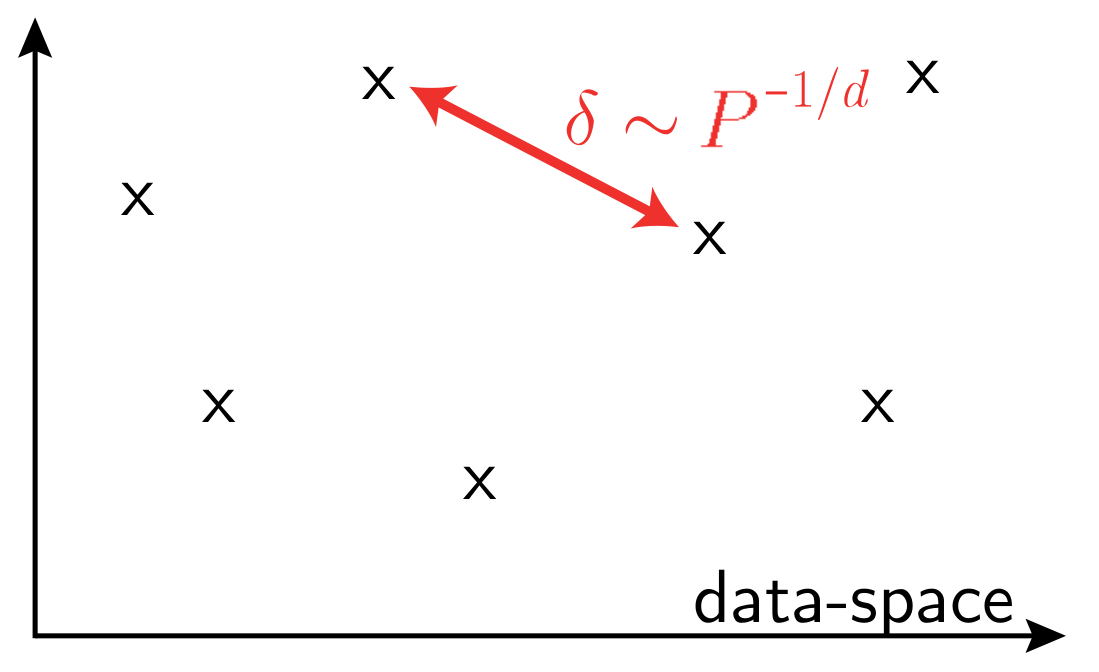
Curse of dimensionality when learning in high-dimension,
in a generic setting
vs.
Learning in high-d implies that data is highly structured
\(P\): training set size
\(d\) data-space dimension
cats
dogs
embedding space: 3D
data manifold: 2D
task: 1D
Common idea: nets can exploit data structure by getting
invariant to some aspects of the data.
Observables:
-
Mutual information: NNs get rid of irrelevant information about the input
-
Intrinsic dimension: dimensionality of NNs representation is reduced with training and depth.
- Nets' kernels PCA: the eigenvectors responsible for most of the variance have large projection on the labels (after training)
Motivation: the success of deep learning (ii)
Which invariances are learnt by neural nets?
not explaining:
Shwartz-Ziv and Tishby (2017); Saxe et al. (2019)
Ansuini et al. (2019), Recanatesi et al. (2019)
Kopitkov and Indelman (2020); Oymak et al. (2019);
Paccolat et al. (2020)
Learning invariances in fully connected nets
Bach (2017);
Chizat and Bach (2020); Ghorbani et al. (2019, 2020); Paccolat et al. (2020);
Refinetti et al. (2021);
Yehudai and Shamir (2019)...
Which data invariances are CNNs learning?
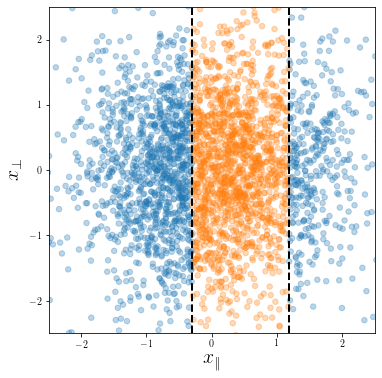
Dataset presenting a linear invariant subspace:
\(\vec x^\mu \sim \mathcal{N}(0, I_d)\), for \(\mu=1,\dots,P\)
Classification task:
\(y(\vec x) = y( x_\parallel) \in \{-1, 1\}\)
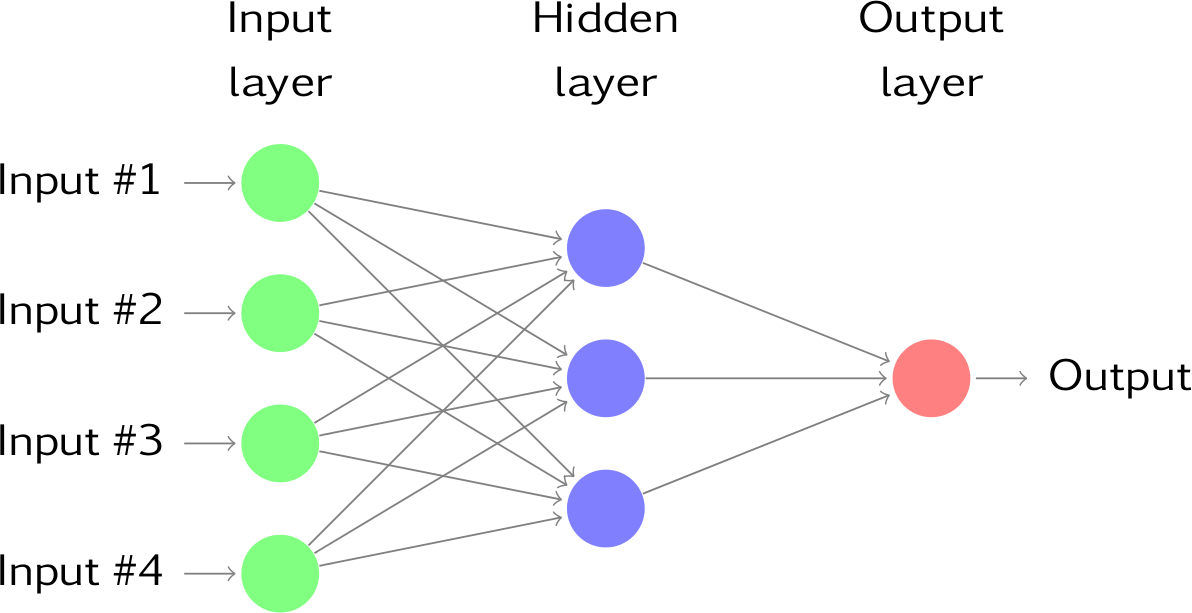
Fully connected network:
Weights evolution during training:
Fully connected network:
Fully connected nets are able to exploit linear invariances.
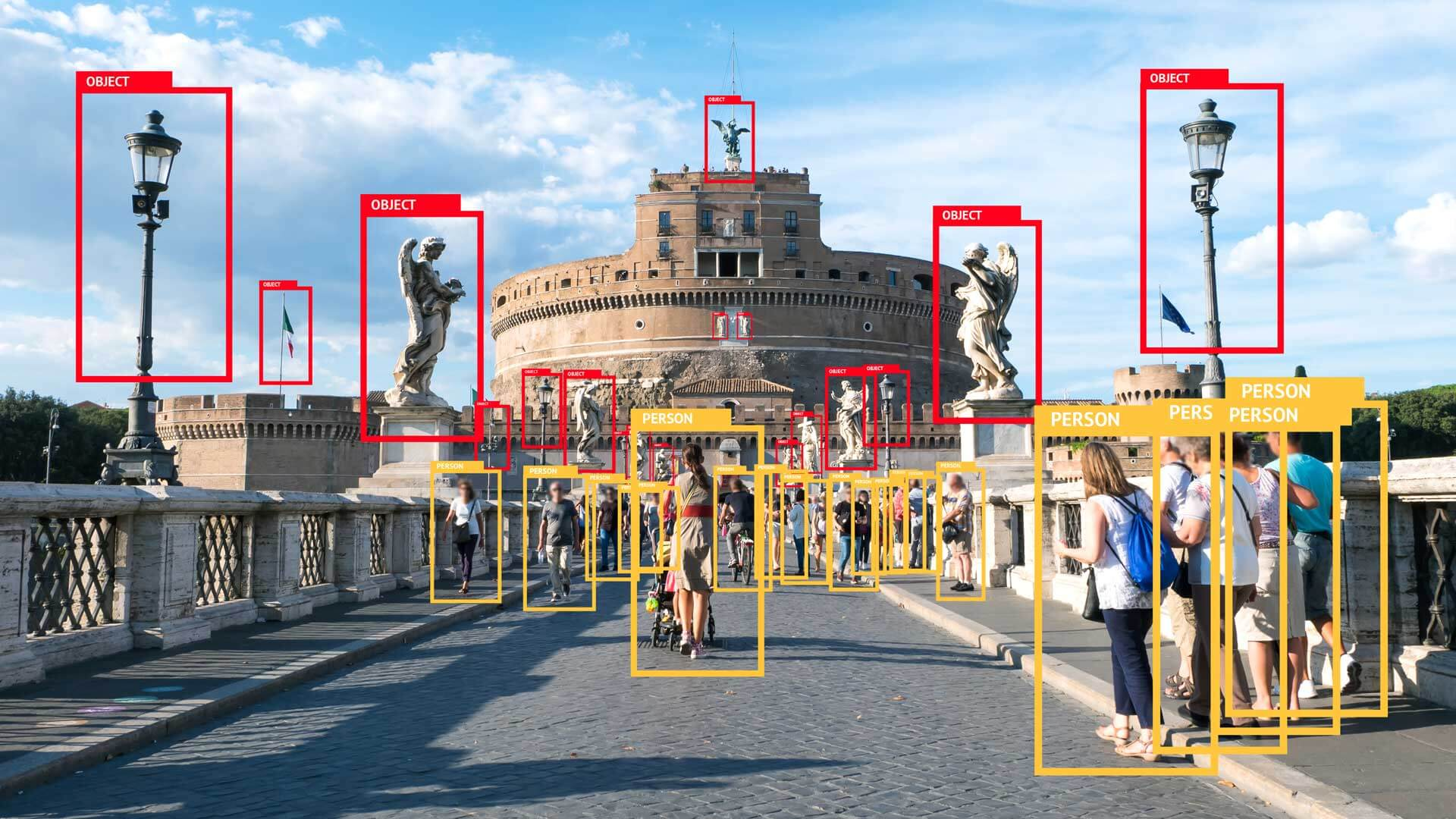
Hypothesis: images can be classified because the task is invariant to smooth deformations of small magnitude and CNNs exploit such invariance with training.
Invariance toward diffeomorphisms
Bruna and Mallat (2013) Mallat (2016)
...
Is it true or not?
Can we test it?
"Hypothesis" means, informally:
\(\|f(x) - f(\tau x)\|^2\) is small if the \(\| \nabla \tau\|\) is small.
\(f\) : network function
The deformation amplitude is measured by $$\| \nabla \tau\|^2=\int_{[0,1]^2}( (\nabla \tau_u)^2 + (\nabla \tau_v)^2 )dudv$$

notation:
\(x(s)\) input image intensity
\(s = (u, v)\in [0, 1]^2\) (continuous) pixel position
\(\tau\) smooth deformation
\(\tau x\) image deformed by \(\tau\)
such that \([\tau x](s)=x(s-\tau(s))\)
\(\tau(s) = (\tau_u(s),\tau_v(s))\) is a vector field
Negative empirical results
Previous empirical works show that small shifts of the input can significantly change the net output.
Issues:
- consider images that have very different statistics than the actual data
- not diffeomorphisms but cropping and resizing
- it is not the absolute value of \(\|f(x) - f(\tau x)\|^2\) that matters (see later).
Azulay and Weiss (2018); Dieleman et al. (2016); Zhang (2019) ...


- Introduce a max-entropy distribution of diffeomorphisms of controlled magnitude
Our contribution:
Max-entropy model of diffeomorphisms
- Goal: draw typical diffeo of fixed norm \(\| \nabla \tau\|\).
- We write the field in real Fourier + boundary conditions: $$\tau_u=\sum_{i,j\in \mathbb{N}^+} C_{ij} \sin(i \pi u) \sin(j \pi v)$$
- We want the distribution over \(\tau\) that maximizes entropy with a norm constraint
- This translate into a distribution for the Fourier coefficients \(C_{ij}\) for which the norm reads $$\|\nabla\tau\|^2 = \frac{\pi^2}{4} \sum_{i,j\in \mathbb{N}^+}(C_{ij}^2 + D_{ij}^2) (i^2 + j^2)$$
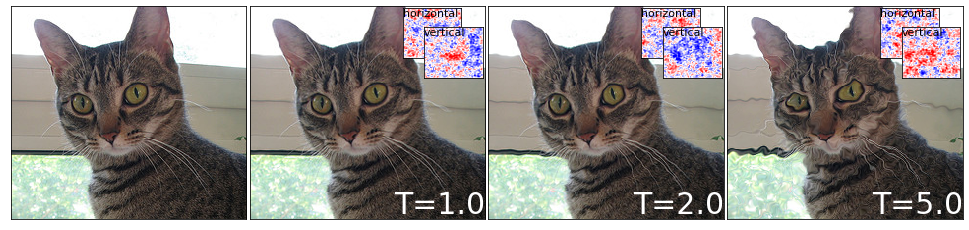
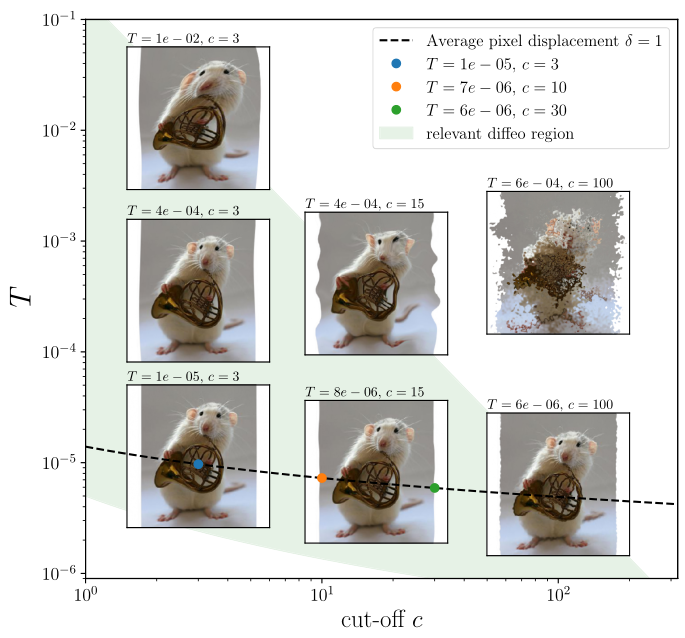
- We control the diffeo norm by introducing a temperature \(\langle\|\nabla\tau\|^2\rangle \propto T\). This gives \(\langle C_{ij}^2 \rangle = \frac{T}{i^2 + j^2}\).
- The distribution for \(C_{ij}\) that maximizes entropy is a Gaussian with zero mean and such variance.
notation:
\(x(s)\) input image intensity
\(s = (u, v)\in [0, 1]^2\) (continuous) pixel position
\(\tau\) smooth deformation
\(\tau x\) image deformed by \(\tau\)
such that \([\tau x](s)=x(s-\tau(s))\)
\(\tau(s) = (\tau_u(s),\tau_v(s))\) is a vector field
The deformation amplitude is measured by $$\| \nabla \tau\|^2=\int_{[0,1]^2}( (\nabla \tau_u)^2 + (\nabla \tau_v)^2 )dudv$$
some examples of diffeomorphisms on images
-
Introduce a max-entropy distribution of diffeomorphisms of controlled magnitude
- Define the relative stability toward diffeomorphisms with respect to that of a random transformation, \(R_f\)
Our contribution:
Relative stability to diffeomorphisms
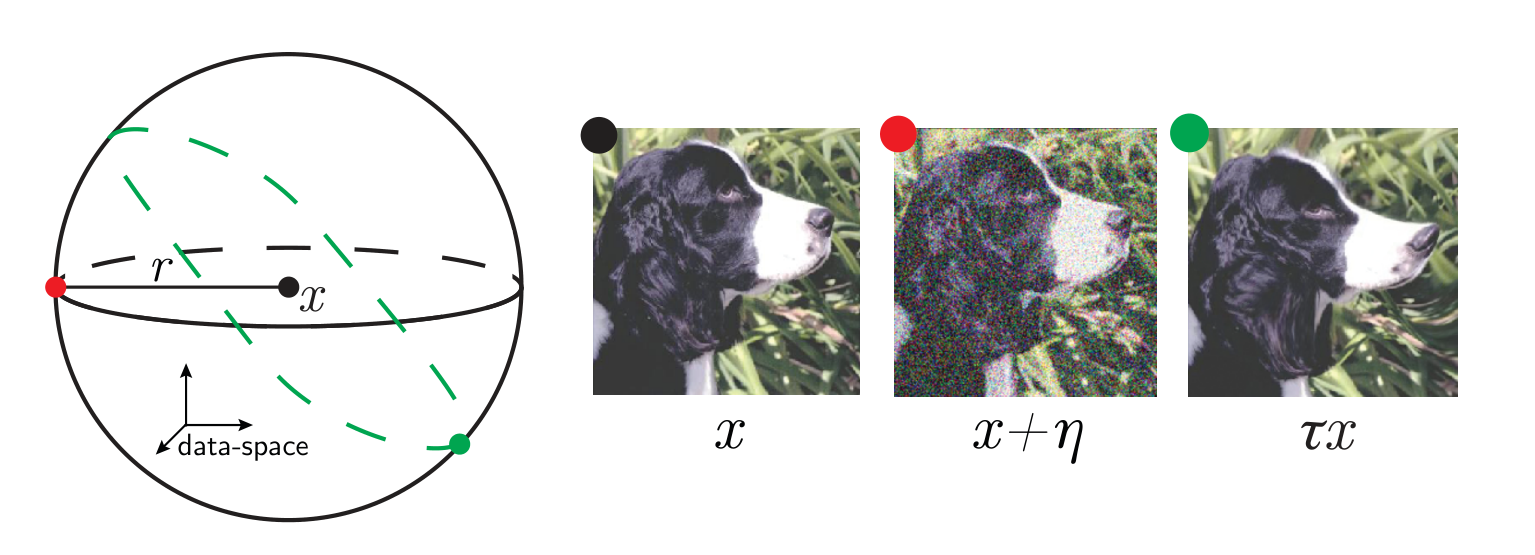
\(x\) input image
\(\tau\) smooth deformation
\(\eta\) isotropic noise with \(\|\eta\| = \langle\|\tau x - x\|\rangle\)
\(f\) network function
Goal: quantify how a deep net learns to become less sensitive
to diffeomorphisms than to generic data transformations
$$R_f = \frac{\langle \|f(\tau x) - f(x)\|^2\rangle_{x, \tau}}{\langle \|f(x + \eta) - f(x)\|^2\rangle_{x, \eta}}$$
Relative stability:
-
Introduce a max-entropy distribution of diffeomorphisms of controlled magnitude
-
Define the relative stability toward diffeomorphisms with respect to that of a random transformation, \(R_f\)
- Study \(R_f\) for different architectures and datasets both at initialization and after training.
Our contribution:
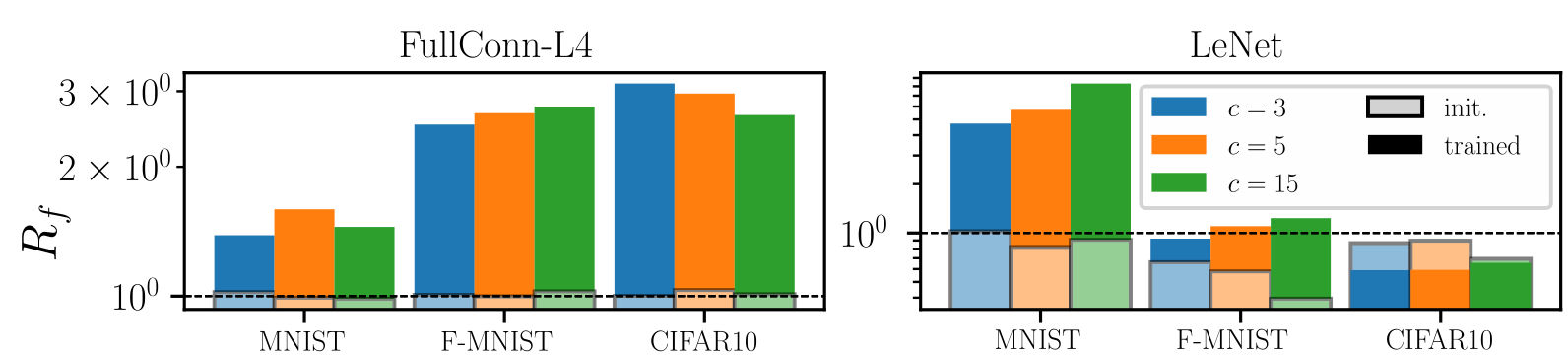
Probing neural nets with diffeo
$$R_f = \frac{\langle \|f(\tau x) - f(x)\|^2\rangle_{x, \tau}}{\langle \|f(x + \eta) - f(x)\|^2\rangle_{x, \eta}}$$
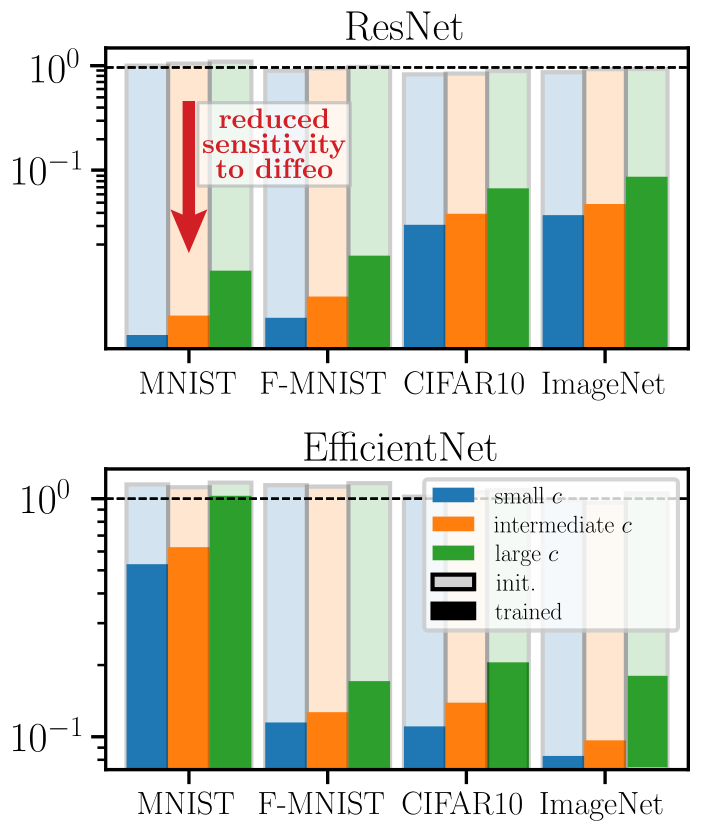

Results:
- At initialization (shaded bars) \(R_f \approx 1\) - SOTA nets don't show stability to diffeo at initialization.
-
After training (full bars) \(R_f\) is reduced by one order of magnitude or two consistently across datasets and architectures.
- By contrast, (2.) doesn't hold true for fully connected and simple CNNs.
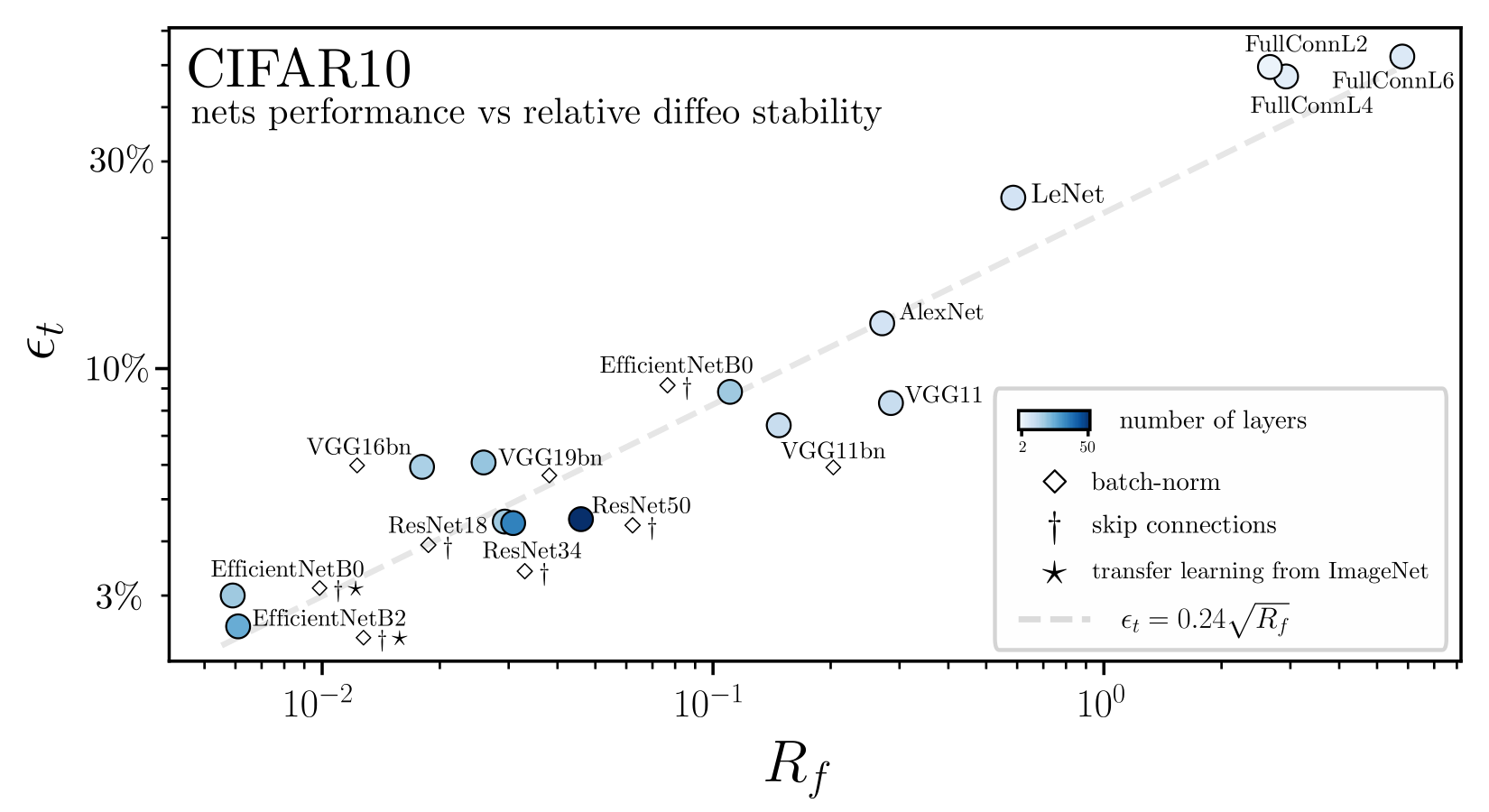
Deep nets learn to become stable to diffeomosphisms!
Relative stability to diffeomorphisms remarkably correlates to performance!
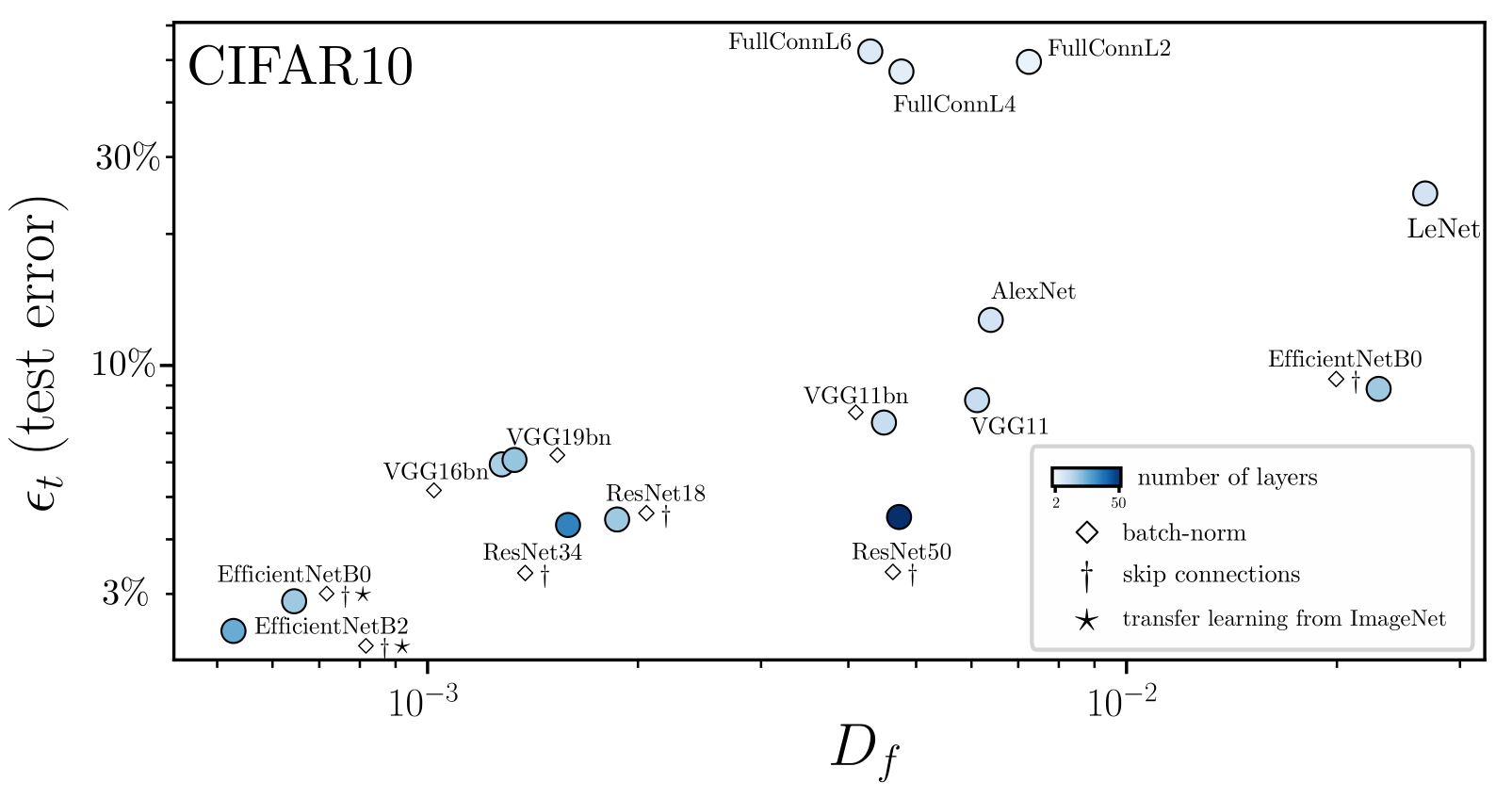
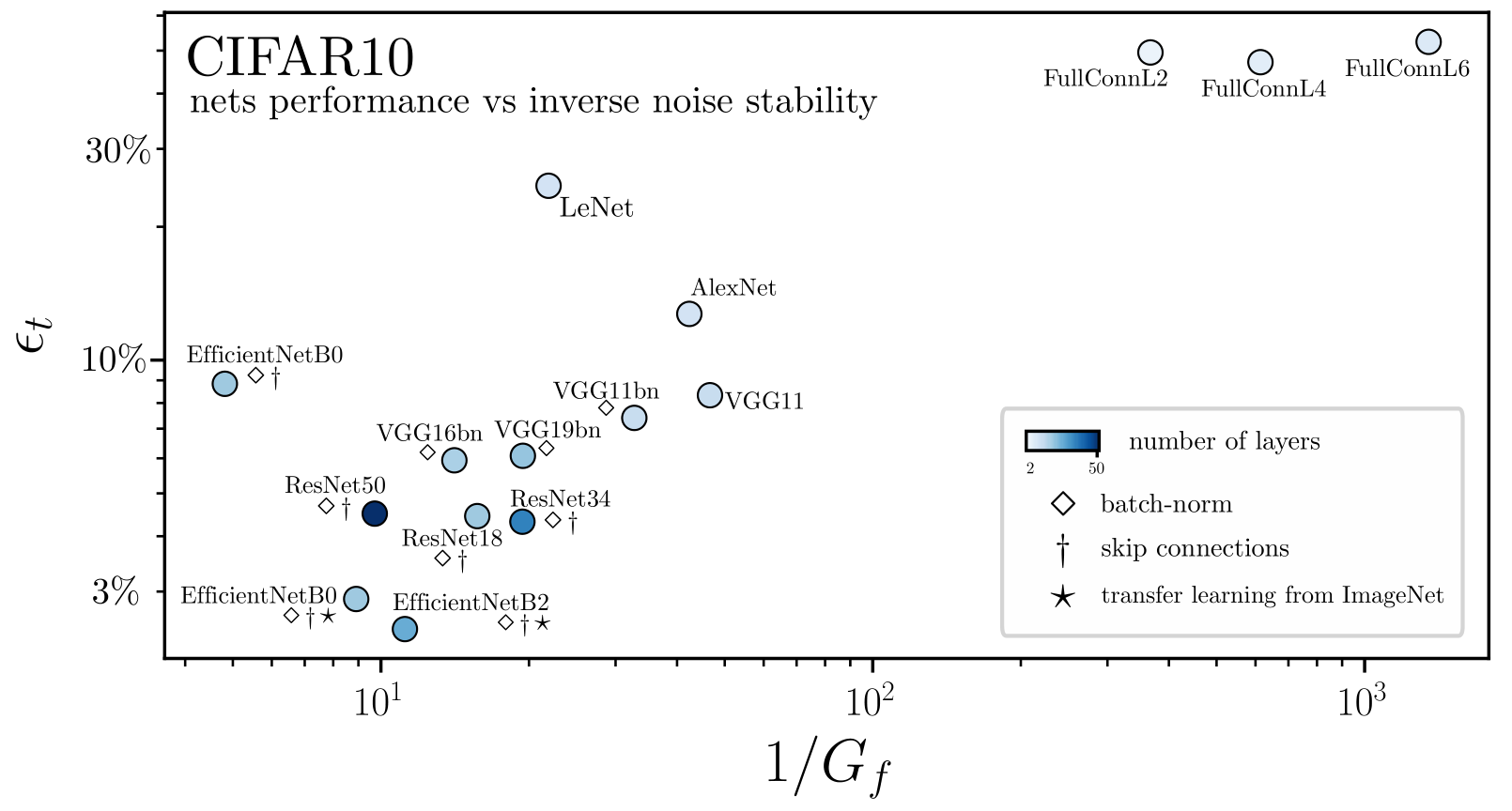
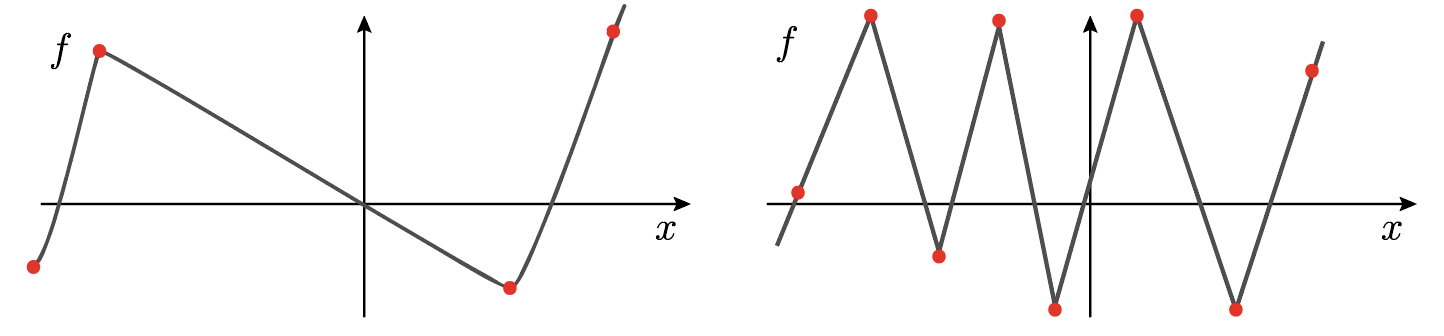
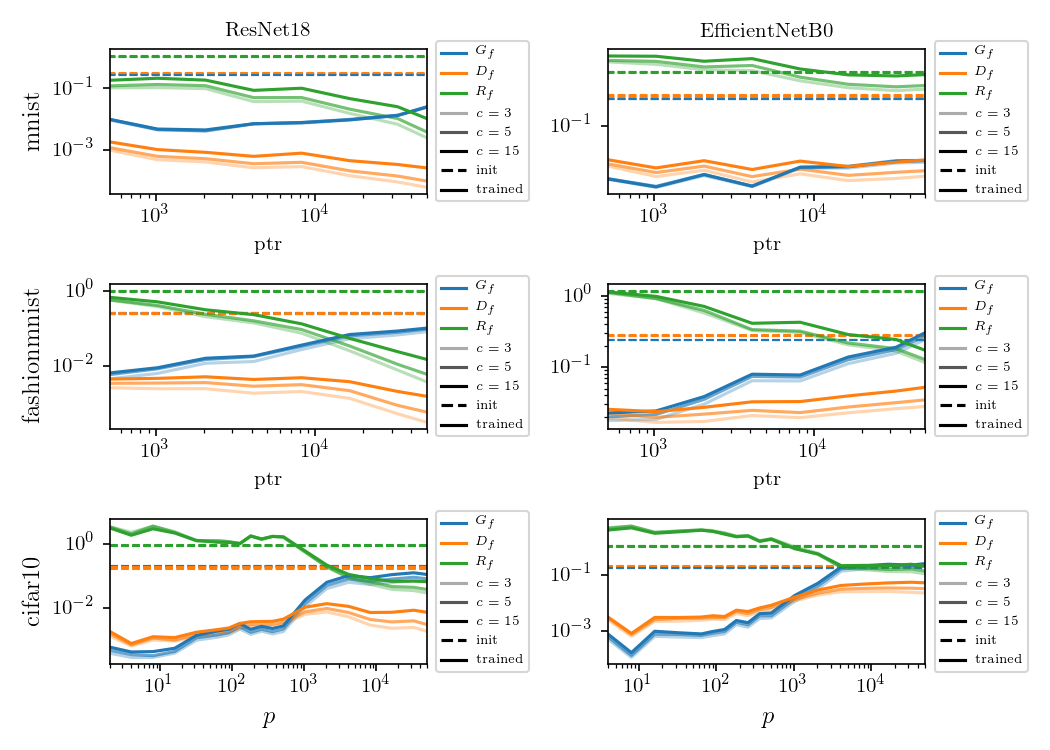
Why relative and not absolute stability?
Relative stability can be rewritten as
diffeo stability
additive noise stability
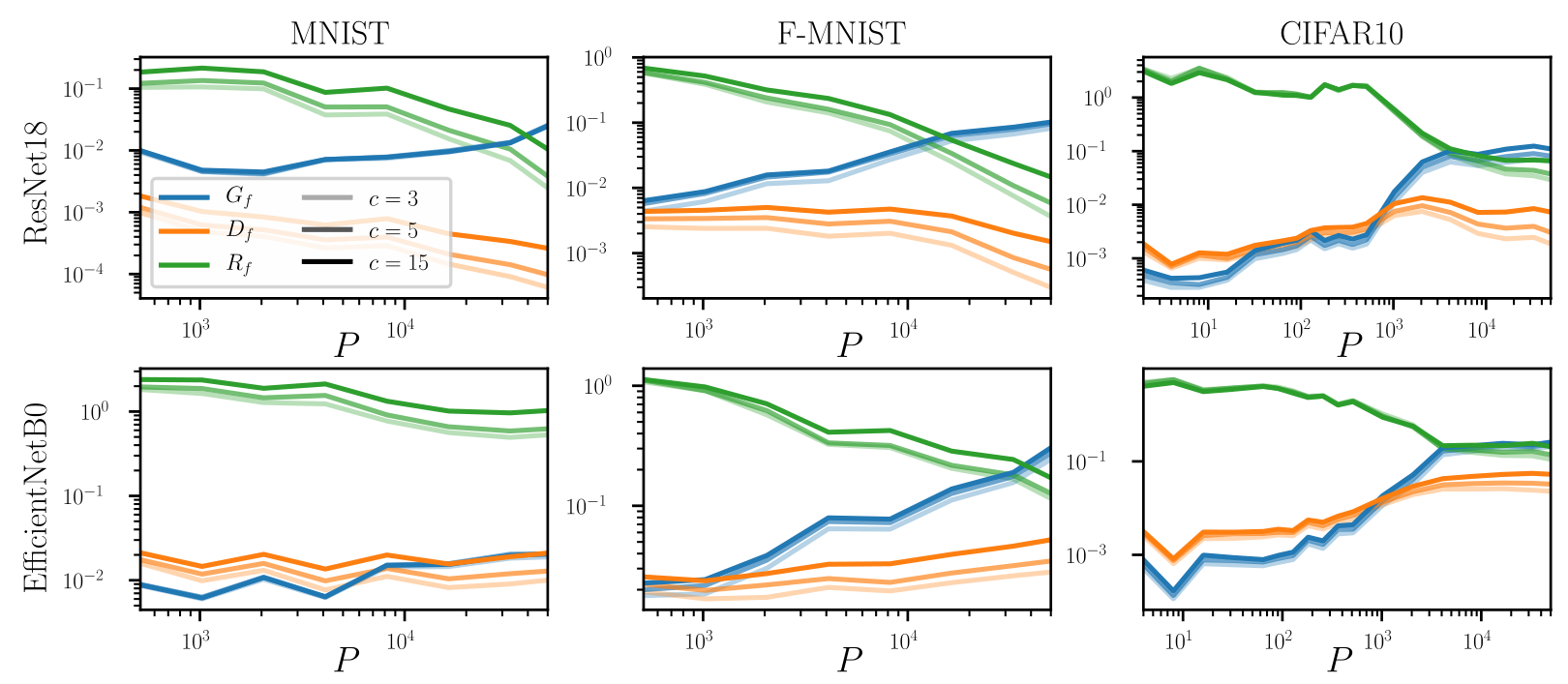
\(P\) : train set size
- \(R_f\) monotonically decreases
- \(G_f\) monotonically increases:
the net function roughens as it needs to fit more and more points - \(D_f\) does not behave universally because it contains two effects:
- roughening of the learned function
- invariance to diffeomorphisms.
Stability \(D_f\) is not the good observable to characterize how deep nets learn diffeo invariance
As a function of the train set size \(P\):
conclusions
- We introduce a novel empirical framework to characterize diffeomorphisms stability in deep nets based on
- a max-entropy distribution of diffeomorphisms
- the realization that relative stability is the relevant observable
-
Main finding: relative stability correlates to performance
- Max-entropy diffeomorphisms can be used for data augmentation
- Investigate connections with adversarial robustness literature
- Mechanistic understanding of how the network learn the invariance
future work
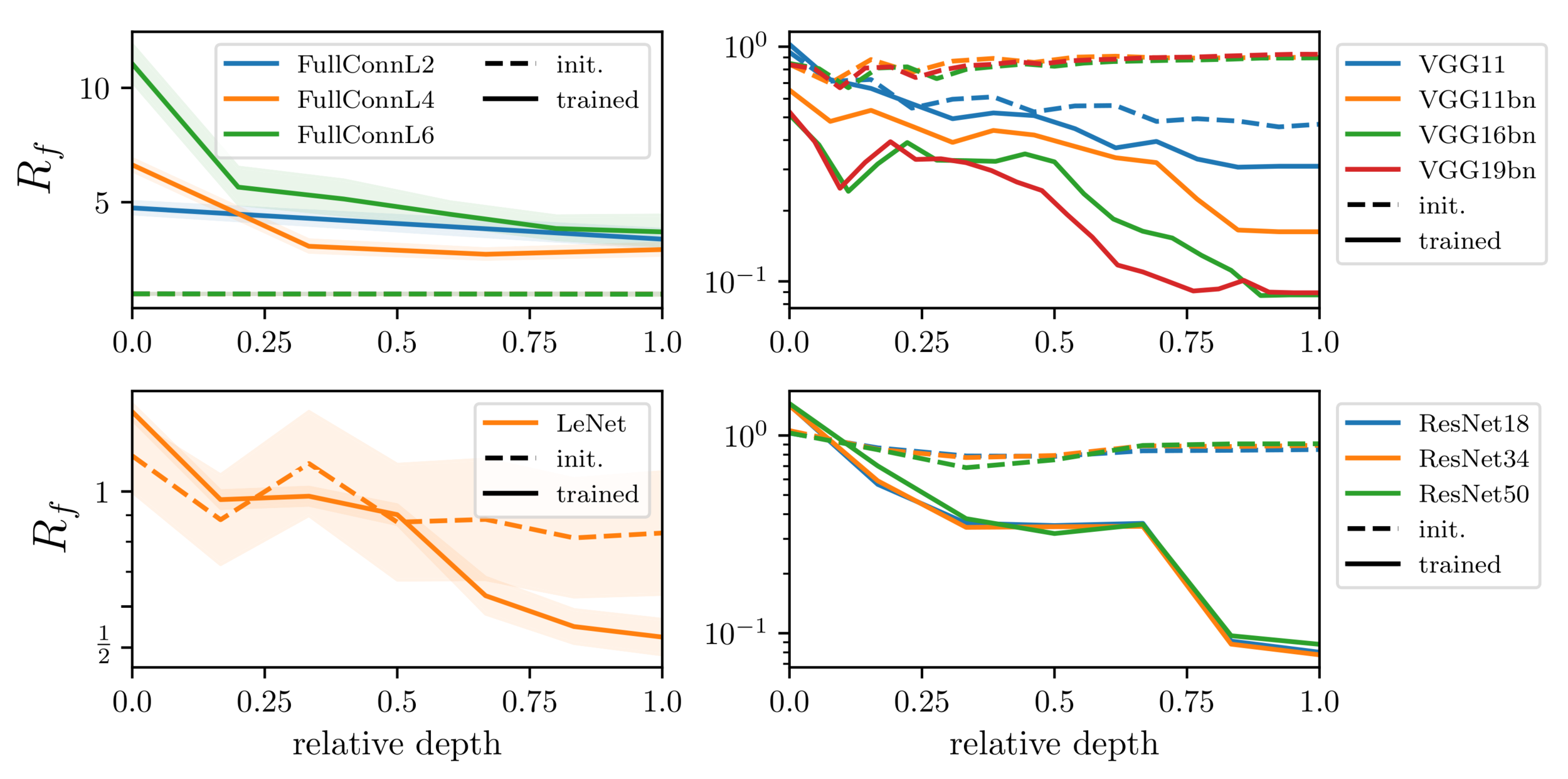
stability in depth:
Thanks!