the role of adaptive pooling
PCSL retreat
Verbier, April 2022
Learning in convolutional neural networks:
The puzzling success of deep learning
- Deep learning is incredibly successful in wide variety of tasks
-
Curse of dimensionality when learning in high-dimensions,
in a generic setting
vs.
- In high dimension, data that have little structure cannot be learned
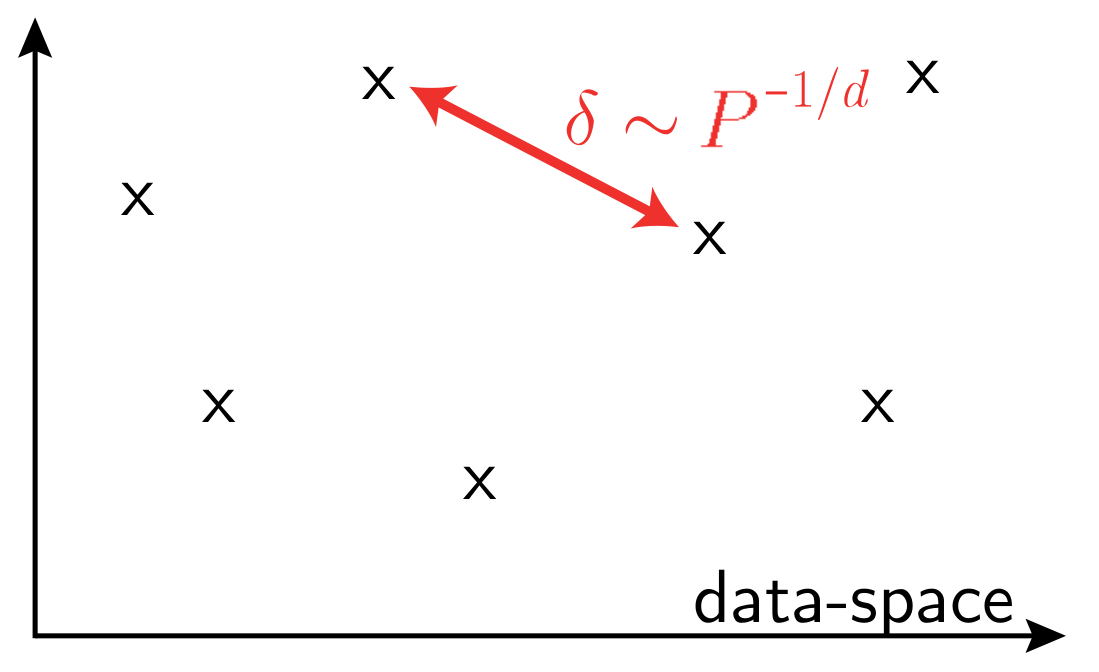
\(P\): training set size
\(d\) data-space dimension
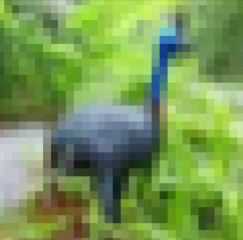
What is the structure of real data?

Cat
- space of dimension \(d\)
- cube of edge \(L=1\)
\(L=1\)
The volume of the cube is 1, we want to allocate that volume to \(P\) smaller cubes, each containing a data-point.
Each smaller cube will have a volume of \(1/P\) and side length:
$$l = \left( \frac{1}{P}\right)^{1/d}$$
\(l\)
the curse of dimensionality
- Idea: there are directions in input space that the task is invariant to.
- An example is the space of image translations - that is small though.
- Space of smooth deformations is much larger - getting invariant to that can be key to escape the curse of dimensionality!
Invariances give structure to data-space
Bruna and Mallat (2013), Mallat (2016), ...
How to characterize such invariance?
\(x-\)translations
\(y-\)translations
(only two degrees of freedom)




- Such invariance can be characterized by the relative stability
- Hypothesis: nets perform better and better by becoming more and more stable to diffeo
Measuring deformation invariance
= "cat"
Measuring deformation invariance

Measuring deformation invariance

Measuring deformation invariance
We define the relative stability to diffeomorphisms as
- Hypothesis: nets perform better and better by becoming more and more stable to diffeo
Is this hyp. true?
Can we test it?
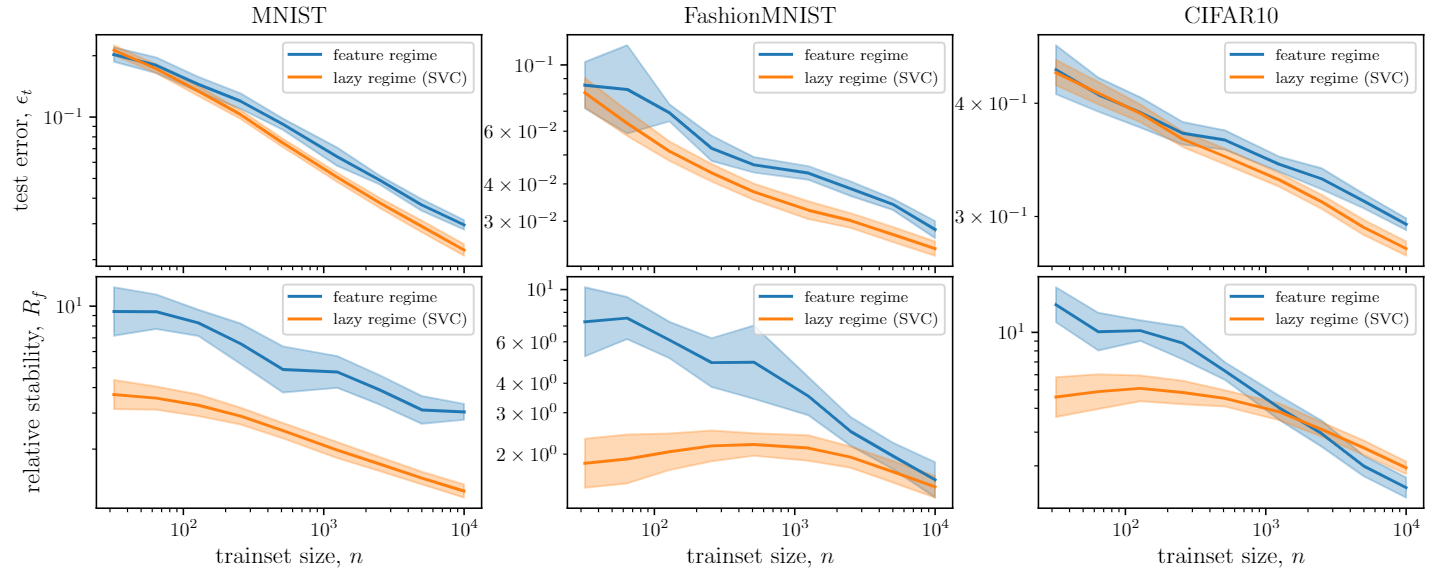
Relative stability to diffeomorphisms
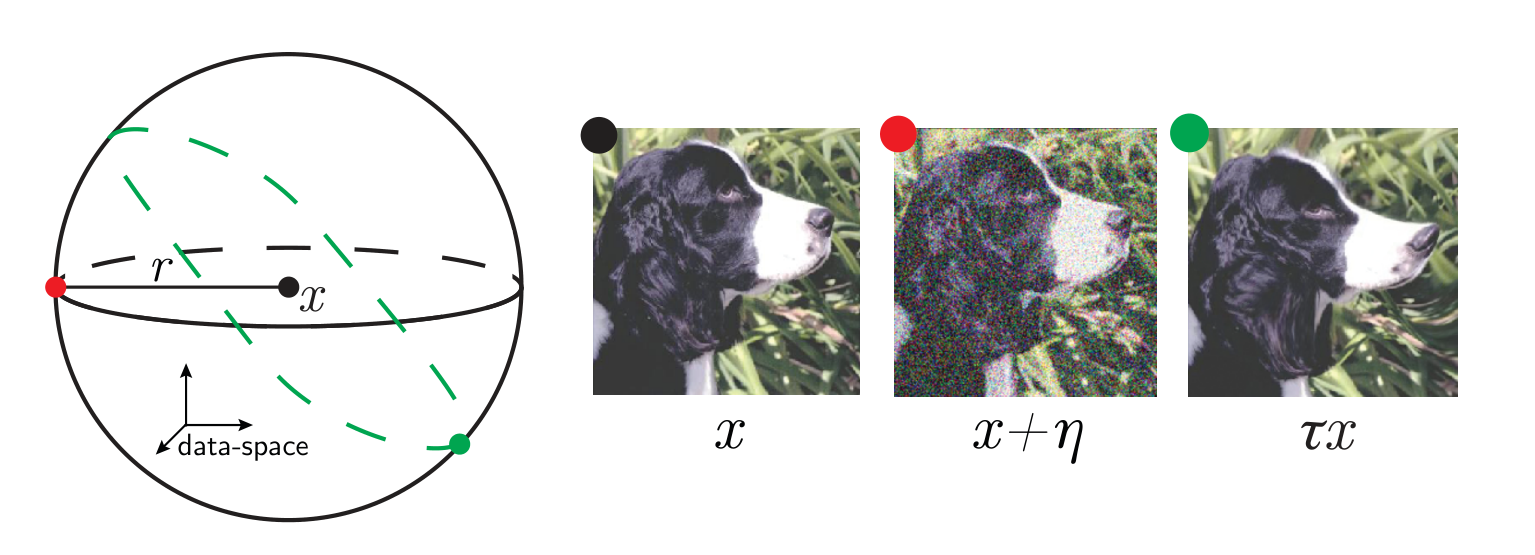
\(x\) input image
\(\tau\) smooth deformation
\(\eta\) isotropic noise with \(\|\eta\| = \langle\|\tau x - x\|\rangle\)
\(f\) network function
Goal: quantify how a deep net learns to become less sensitive
to diffeomorphisms than to generic data transformations
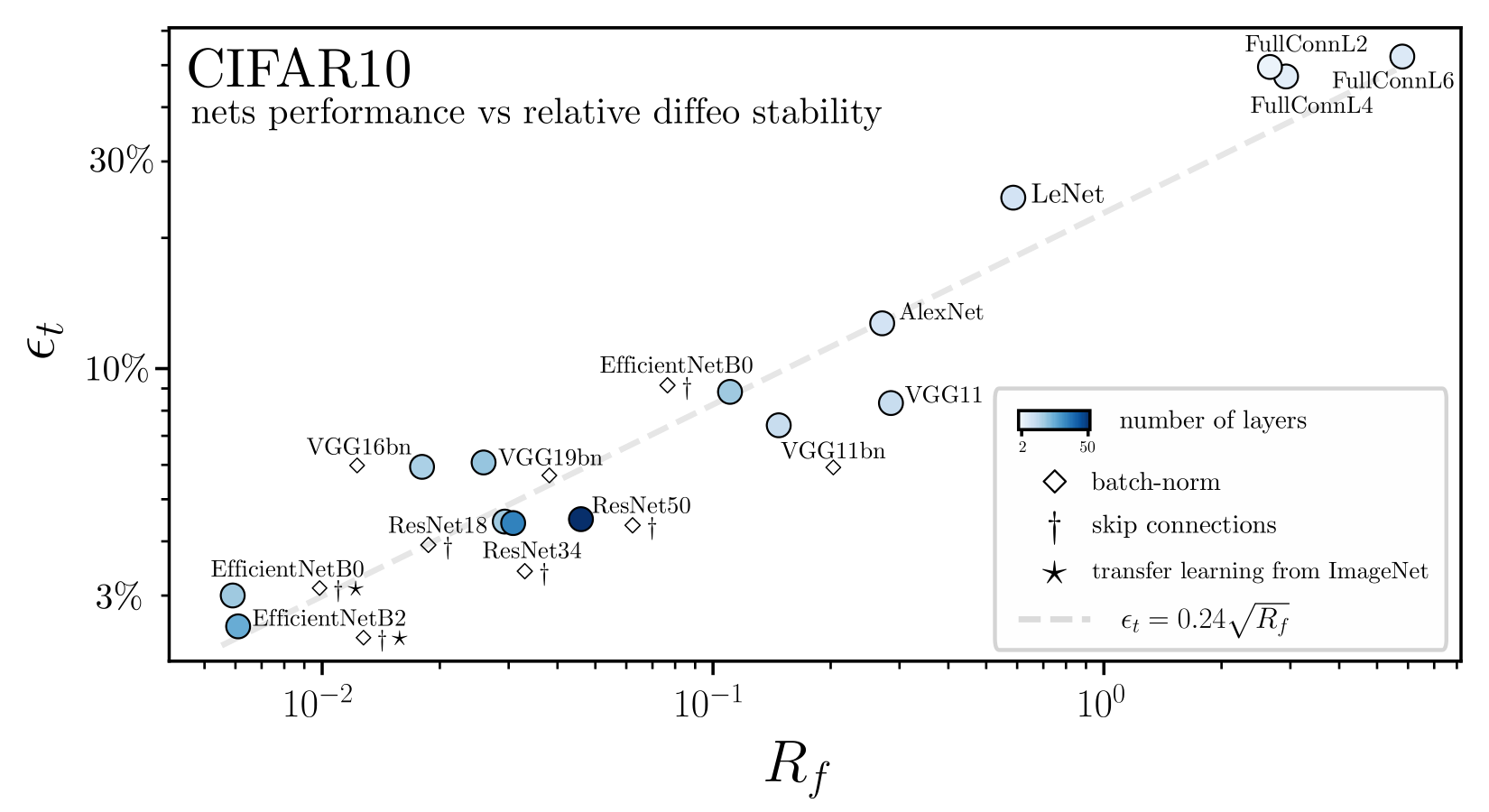
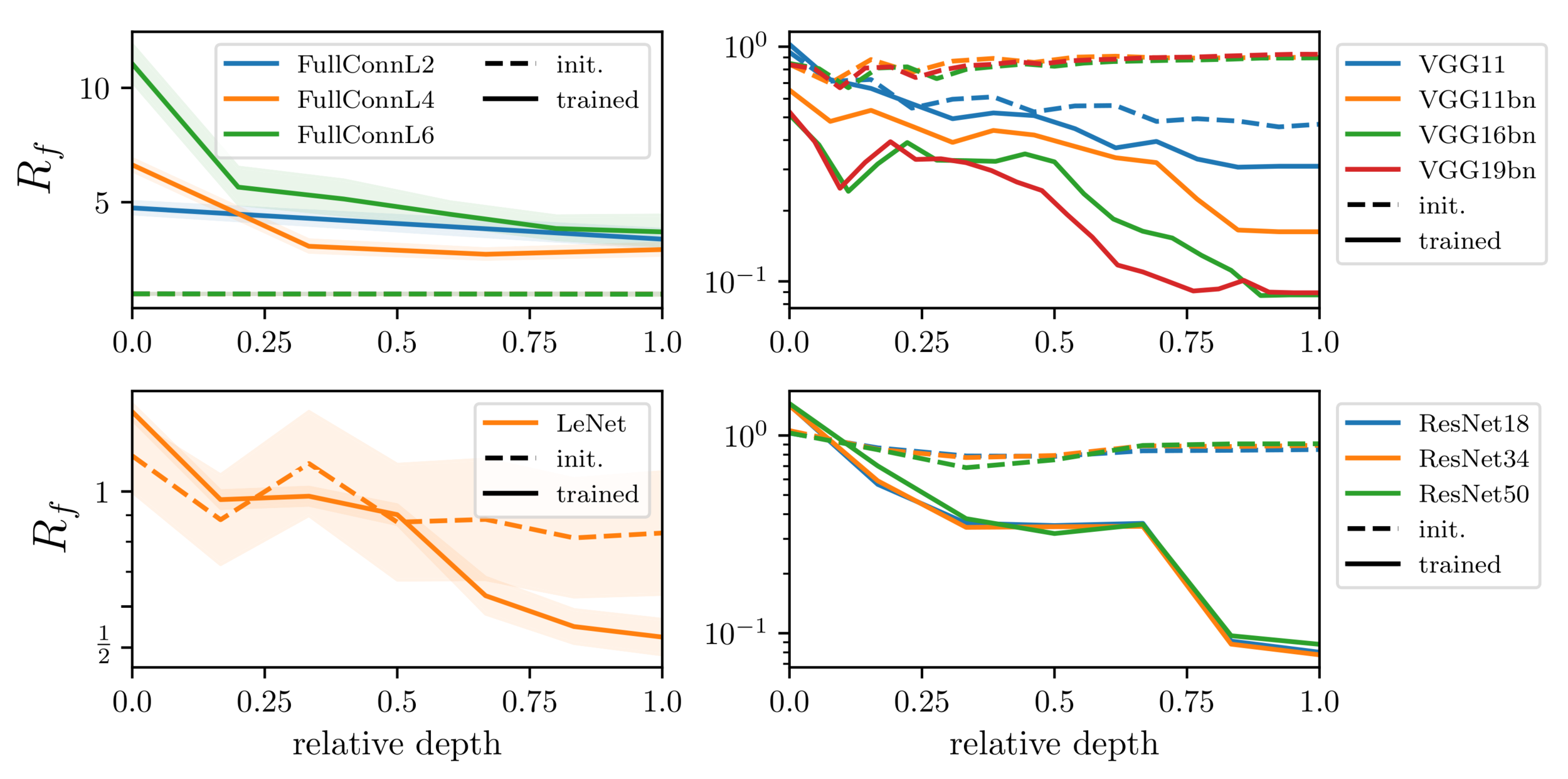
$$R_f = \frac{\langle \|f(\tau x) - f(x)\|^2\rangle_{x, \tau}}{\langle \|f(x + \eta) - f(x)\|^2\rangle_{x, \eta}}$$
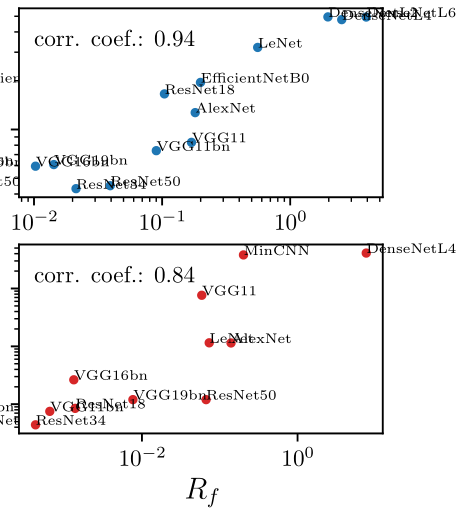
Relative stability:
Relative stability to diffeomorphisms remarkably correlates to performance!
2. How do CNNs build diffeo stability and perform well?
1. How to rationalize this behavior?


-
Why FC nets unlearn diffeo stability?
-
How do CNNs build diffeo stability?
Outline
A spherically symmetric dataset
- Dataset: \(\{\)\(\mathbf x_\mu\)\(, y_\mu\}\) with \(\mathbf x_\mu\)\( \in \mathbb{S}^{d-1}\) and \(y_\mu = 1\)
A spherically symmetric dataset
weights \(\mathbf w_h\) before training
- Dataset: \(\{\)\(\mathbf x_\mu\)\(, y_\mu\}\) with \(\mathbf x_\mu\)\( \in \mathbb{S}^{d-1}\) and \(y_\mu = 1\)
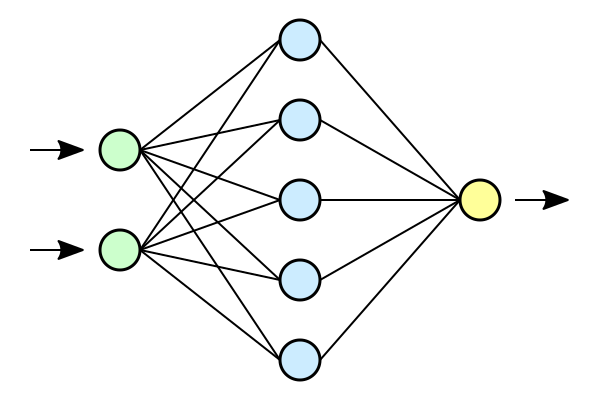
- Architecture: Fully connected network: \(f(\mathbf x) = \frac{1}{H}\sum_{h=1}^H c_h\, \sigma(\)\(\mathbf w_h\)\(\cdot \mathbf x)\)
- Algorithm: gradient descent on the mean square loss: \(\mathcal{L} = \frac{1}{2P} \sum_{\mu = 1}^P \)\((f(\mathbf x_\mu) - y_\mu)^2\)
A spherically symmetric dataset
- Dataset: \(\{\)\(\mathbf x_\mu\)\(, y_\mu\}\) with \(\mathbf x_\mu\)\( \in \mathbb{S}^{d-1}\) and \(y_\mu = 1\)
- Architecture: Fully connected network: \(f(\mathbf x) = \frac{1}{H}\sum_{h=1}^H c_h\, \sigma(\)\(\mathbf w_h\)\(\cdot \mathbf x)\)
- Algorithm: gradient descent on the mean square loss: \(\mathcal{L} = \frac{1}{2P} \sum_{\mu = 1}^P \)\((f(\mathbf x_\mu) - y_\mu)^2\)
after training the
symmetry is preserved
after training the
symmetry is BROKEN
lazy regime
feature regime
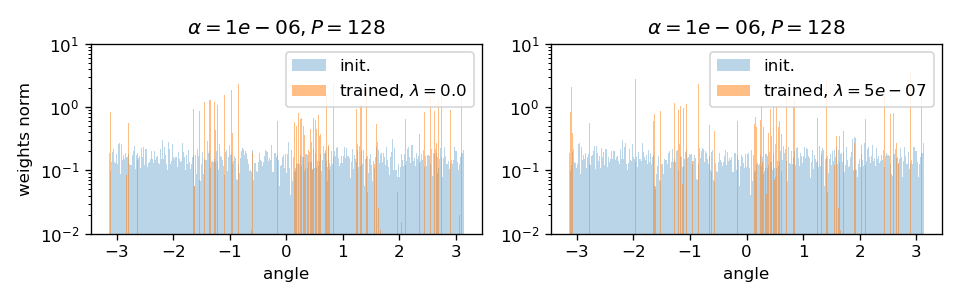
evidence: sparsification
LAZY REGIME
FEATURE REGIME
A spherically symmetric dataset to gain insights on real images
- Dataset: \(\{\)\(\mathbf x_\mu\)\(, y_\mu\}\) with \(\mathbf x_\mu\)\( \in \mathbb{S}^{d-1}\) and \(y_\mu = 1\)
- Architecture: Fully connected network: \(f(\mathbf x) = \frac{1}{H}\sum_{h=1}^H c_h\, \sigma(\)\(\mathbf w_h\)\(\cdot \mathbf x)\)
- Algorithm: gradient descent on the mean square loss: \(\mathcal{L} = \frac{1}{2P} \sum_{\mu = 1}^P \)\((f(\mathbf x_\mu) - y_\mu)^2\)
weights \(\mathbf w_h\) after training
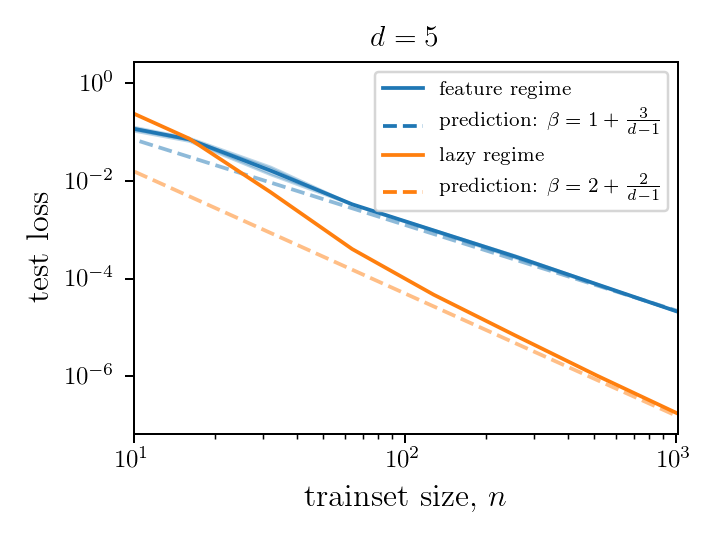
Lazy vs. feature performance in the spherical model
As a result, lazy performs better and is more stable to rotations.
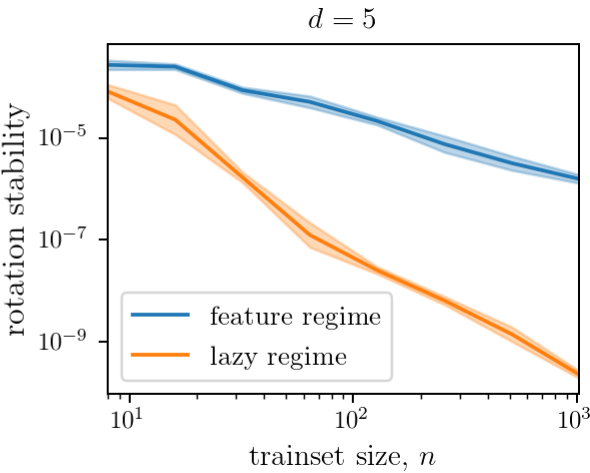
Rotation stability: $$S = \langle \|f(x) - f(R_\theta x)\|^2\rangle_{x, \theta}$$
To recap:
If we are given a dataset with a spherical symmetry and our model is correctly initialized:
- The lazy regime will preserve the symmetry
- The feature regime will overfit the training data and break the symmetry.
The spherical model rationalizes real-data findings
Spherical model
Images
- Spherical symmetry
- Training a FC network in the feature regime breaks the symmetry
- Local deformations "symmetry"
- Training a FC network in the feature regime worsen the invariance to diffeo
- This is because all directions in input space should be treated equally but feature "overfits" some of them
- By contrast, the lazy regime has a good prior at initialization and performs better
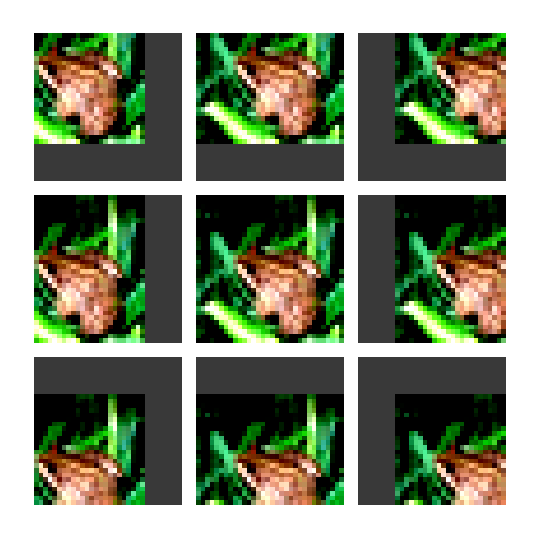
- Neighboring pixels should be treated equally for local deformation invariance to hold
- Feature breaks local deformation symmetry \(\rightarrow\) it "overfits" some specific pixels
- For the analogy to hold, lazy regime should have a better prior as it treats all pixels equally, indeed:
4 neigh. pixels
arrows: deformation
-
Why FC nets unlearn diffeo stability?
-
How do CNNs build diffeo stability?
The poor choice of architecture is such that the feature regime breaks the symmetry by overfitting pixels.
2.
Outline
CNNs building block: the convolutional layer
channel 1
channel 2
output (activation map)
input image
a non-linearity is applied here element-wise,
e.g. \(\text{ReLU}(x) = \max(0, x)\)
A convolutional neural network:
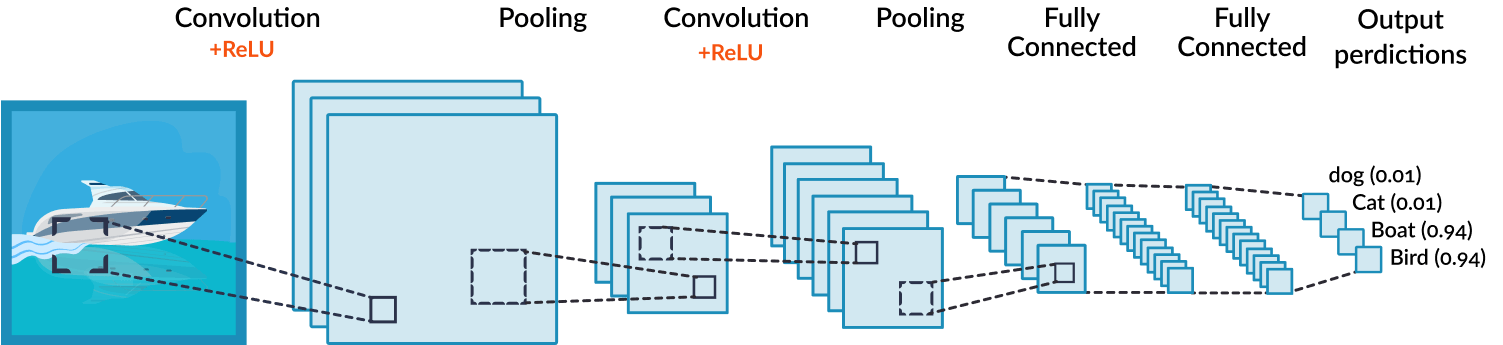
Stacking together many convolutional layers
Which parts of the network give relative stability?
Relative stability to diffeo is achieved layer-by-layer:
Which mechanism(s) can give stability in a layer?
Which operations give relative stability to diffeo?
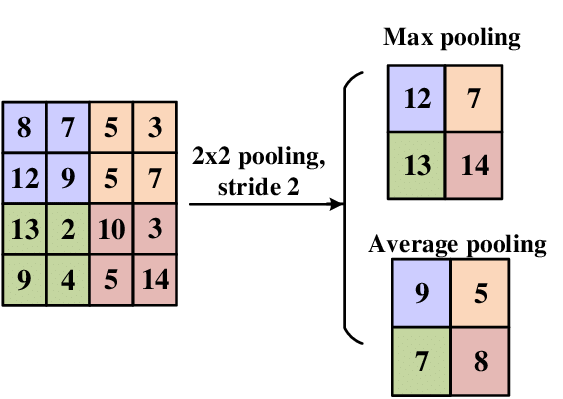
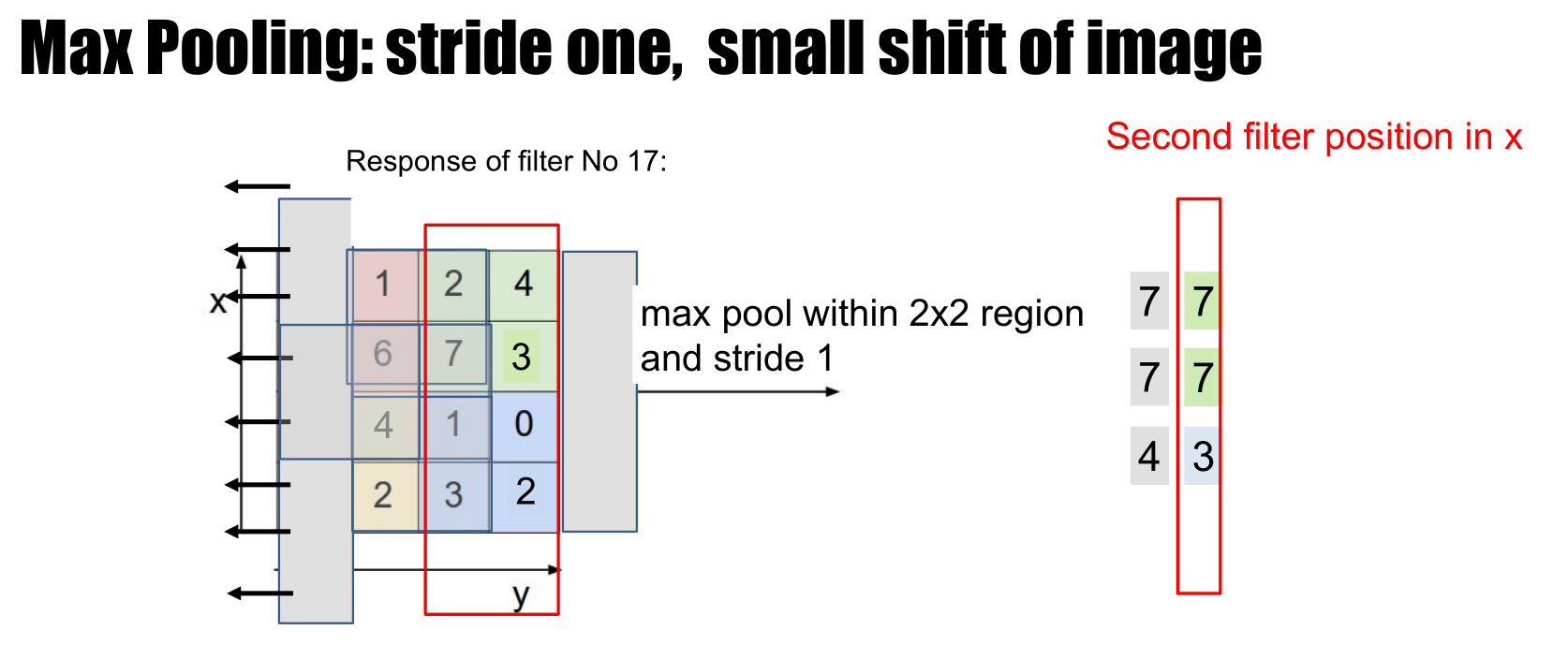
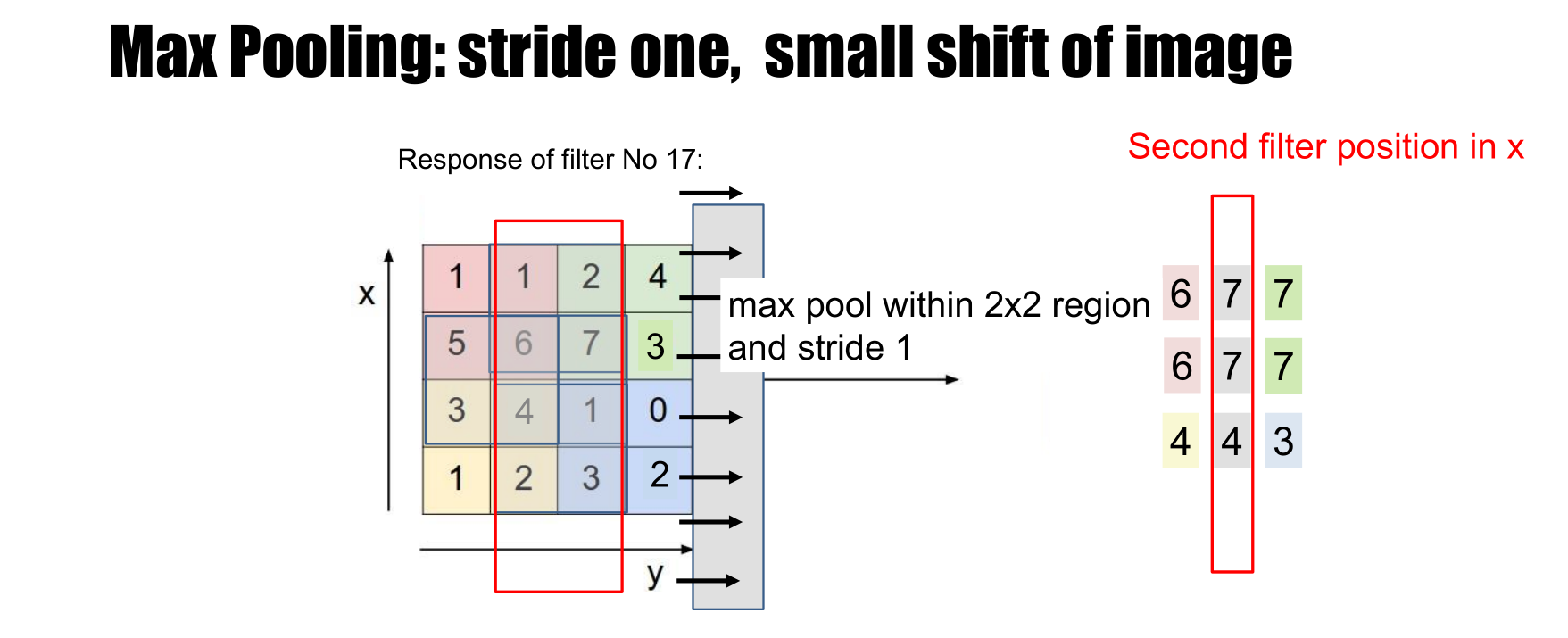
Spatial pooling
Channel pooling
Average pooling can be learned by making filters low pass
Channel pooling can be learned by properly coupling filters together
- Reduce the resolution of the feature maps by aggregating pixel values
- Gives stability to local translations
- Filters of different channels reproduce a symmetry in the data and get coupled together.
- Can give stability to any local transformation.
\(w\cdot x=\)
\(1.0\)
0.2
filters \(w\)
1
input \(x\)
0.2
\(1.0\)
1
rotated input
1
filters \(w\)
input \(x\)
\(w\cdot x=\)
\(1.0\)
0.2
1
\(1.0\)
0.2
rotated input
1
filters \(w\)
input \(x\)
\(w\cdot x=\)
\(1.0\)
0.2
0.1
1
\(1.0\)
0.2
0.1
rotated input
Disentangling spatial and channel pooling in DNNs
Which one gives the observed relative stability in DNNs?
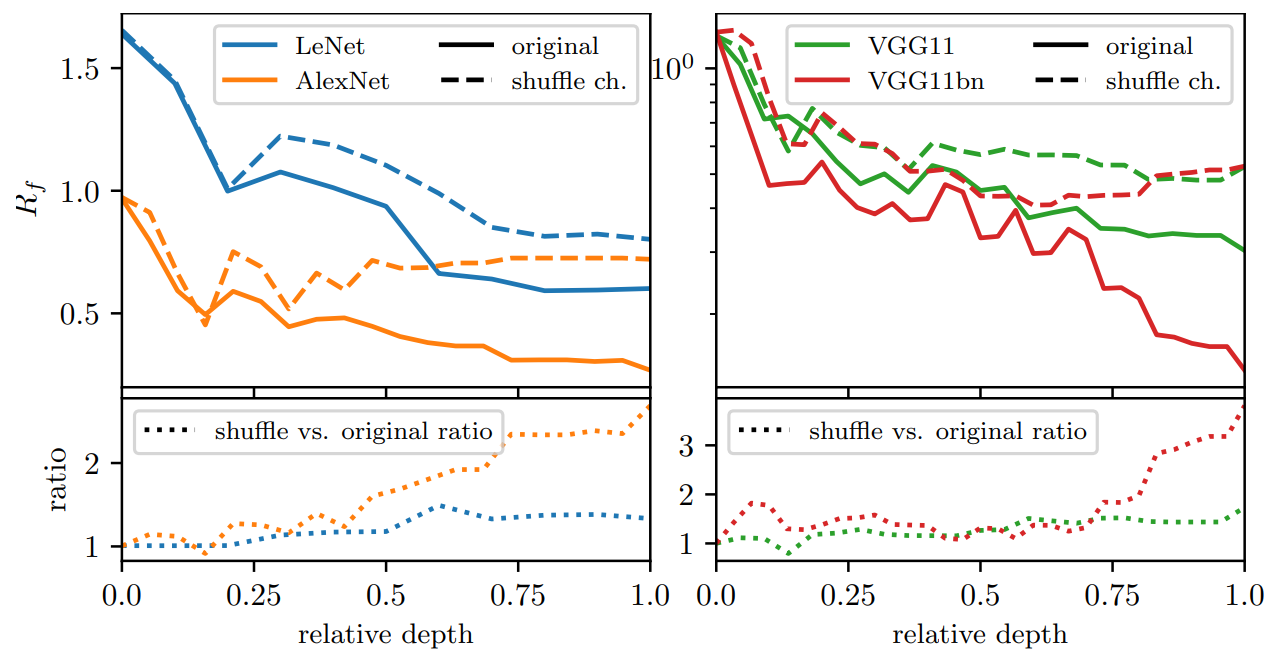
- Filter pooling: 1st half of the network
- Channel pooling: 2nd half of the network
- Filter pooling is related to the filters frequencies
- Channel pooling to how filters in different channels are coupled together
- Idea: if we shuffle the connections between channels we destroy channel pooling while leaving filter pooling intact:
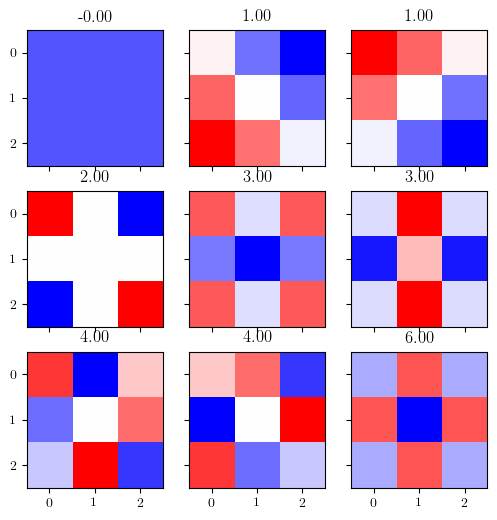
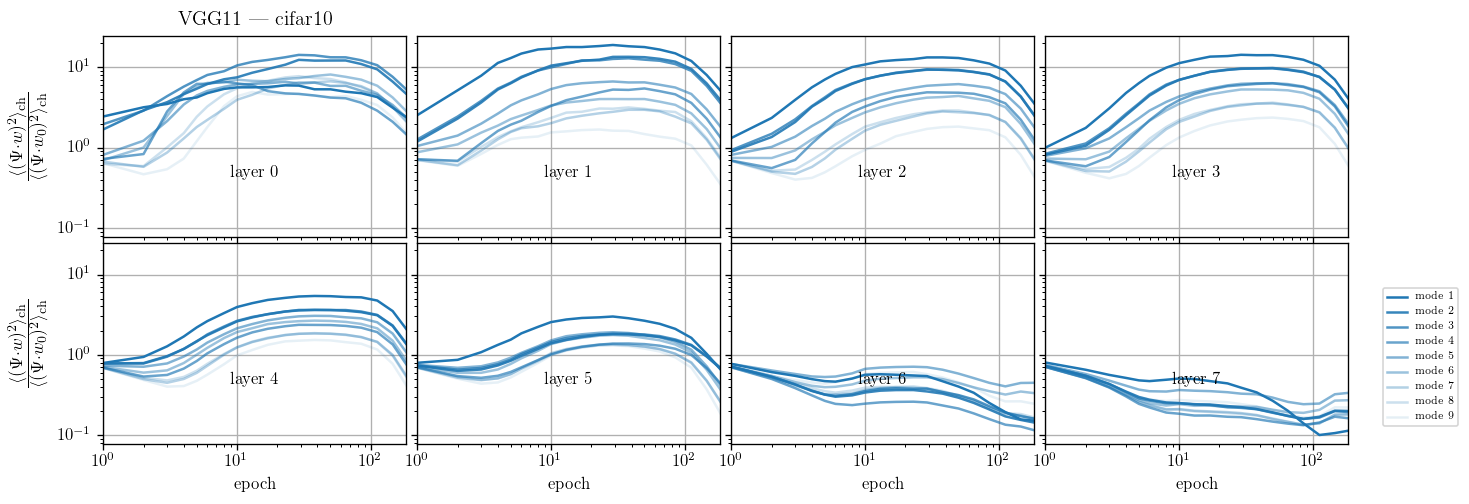
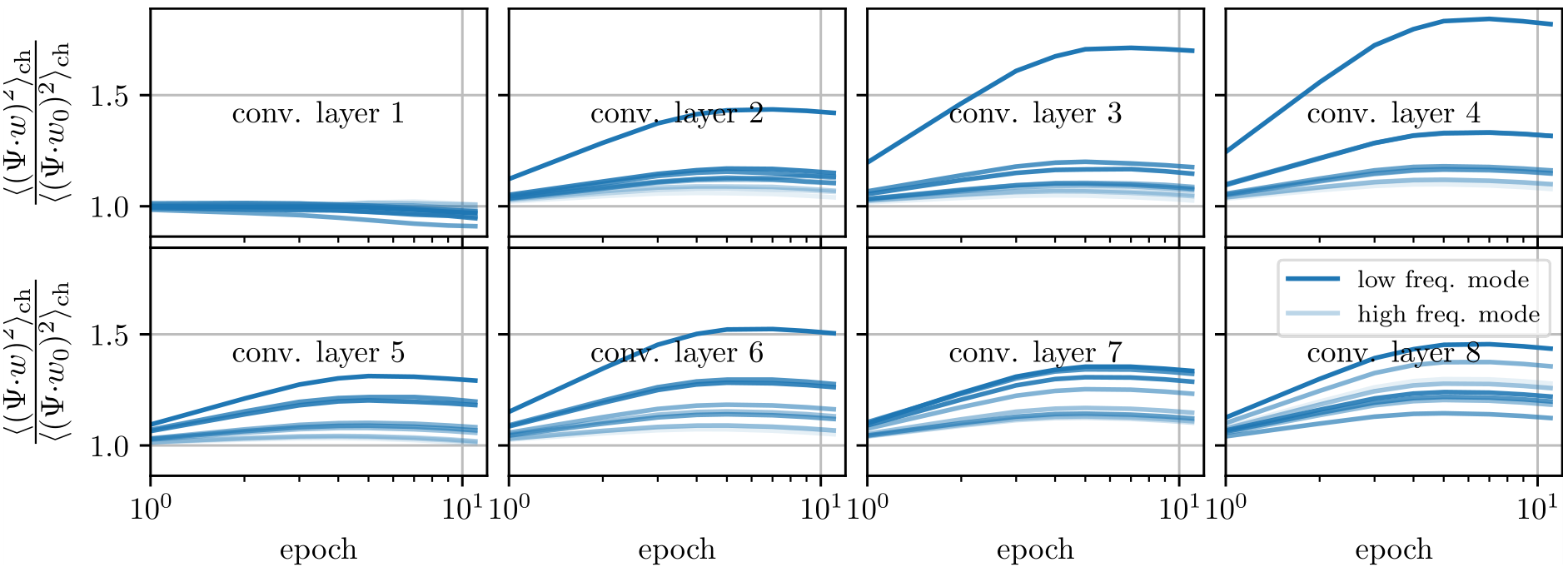
We take a basis that is the eigenvectors of the Laplacian on the 3x3 grid and follow weigths evolution on each of the components and average over the channels:
$$c_{t, \lambda} = \langle (w_{\rm{ch}, t} \cdot \Psi_\lambda )^2\rangle_{\rm{ch}}$$
we plot $$\frac{c_{t, \lambda}}{c_{t=0, \lambda}}$$
Weights become low-pass with training
Additional evidence for filter pooling:
+
0
-
Filters actually learn to pool!
A data model for filter pooling
A model for filter pooling
Goal: build a data model in which learning to do filter pooling is needed to learn the task
image frame (e.g. 32x32 pixels)
- Background value = 0
- Two pixels of value +1
data-points \(x_\mu\in \mathbb{R}^{d\times d}\)
labels \(y_\mu\)
Euclidean distance, \(\delta_\mu\)
$$y_\mu = \text{sign} (\xi - \delta_\mu)$$
A network needs to learn to pool at the good length-scale \(\xi\) to generalize
data-set \(\{x_\mu, y_\mu\}\)
Adaptive pooling model can reproduce real-data obervations

- Test error is strongly correlated to relative stability
- Filters become low-frequency with training
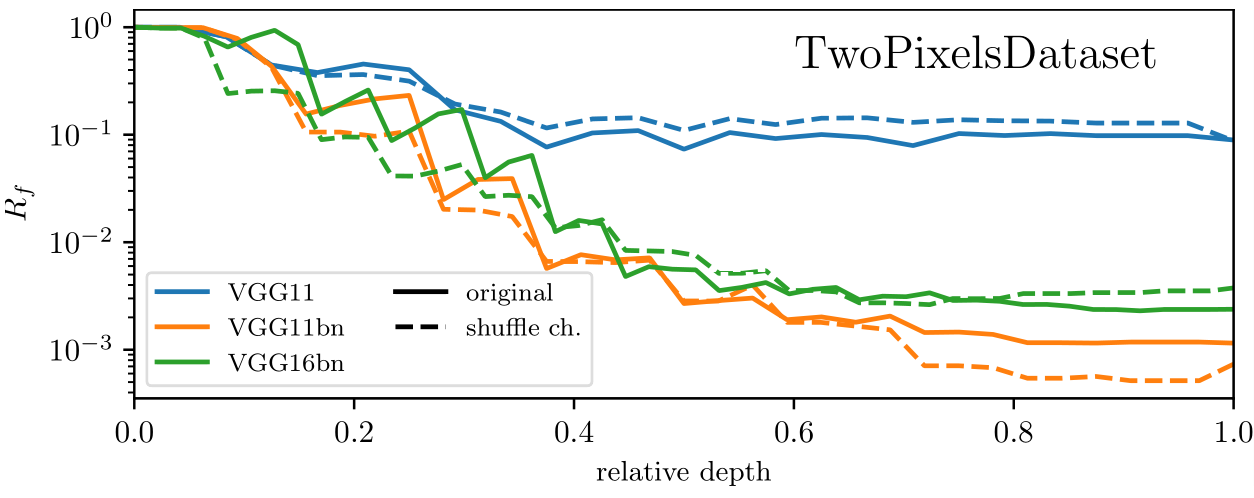
As expected, channel pooling is not present (i.e. shuffling channels has no effect in terms of relative stability).
Can we build a theory for the adaptive pooling model to rationalize real-data findings?
-
Why FC nets unlearn diffeo stability?
-
How do CNNs build diffeo stability?
The poor choice of architecture is such that the feature regime breaks the symmetry by overfitting pixels.
- We find evidence of both filter and channel pooling playing a role
- We have a model for adaptive filter pooling that can reproduce real-data phenomenology
Outline
A simple convolutional network 1/2
Input
Channel 1
Channel H
Channel 1
Channel H
L hidden layers
A simple convolutional network 2/2
Channel 1
Channel H
Global Average Pooling of each channel:
to enforce translational invariance within it
Output \(f_p\)
Our strategy
- We consider the TwoPixelsDataset in one dimension, with Periodic Boundary Conditions and length \(l=32\).
- We want to look at how the CNN builds up adaptive pooling, i.e. how it recognizes the scale \(\xi\).
- We try to propose a solution (i.e. a choice of parameters as filters and bias) which can capture the solution reached by the CNN.
Solution 1: low-frequency filters 1/2
Layer 1
Input
All filters like that, zero bias
We choose \(\xi =7\) and filter size \(s = 3\)
At layer \(k\), the receptive field of a single neuron is \((2k+1)\): given \(\xi=7\), the layer \(\tilde{k}\) where the scale can be seen is at \(\tilde{k}=3\)
For layers \(k<\tilde{k}\): as above.
Solution 1: low-frequency filters 2/2
Layer \(\tilde{k}\)
-1 bias
Sign of positive interference!
Output: \(f_p(x)=f_p(d)=\text{ReLu}(\xi-d)\)
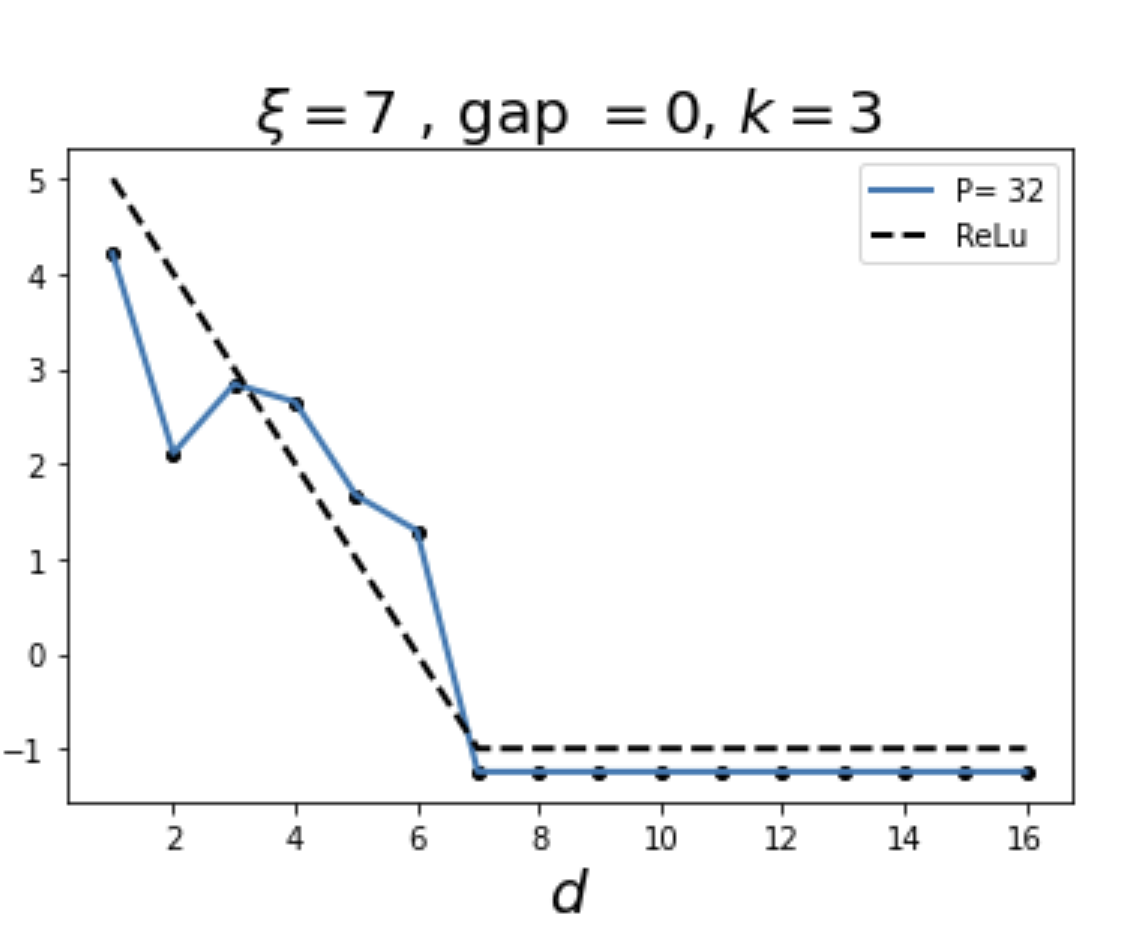
-1
Solution 1: high-frequency filters 1/2
Input
Layer 1,
3 channels
- For layers \(k<\tilde{k}\): as above.
Layer \(\tilde{k}\)
-1 bias
Sign of positive interference!
Output: \(f_p(x)=f_p(d)=\text{ReLu}(\xi-d)\)
-1
Solution 1: high-frequency filters 2/2
Computing stability to diffeo
What does a diffeo \(\tau\) do here?
Prob 1/3
Prob 1/3
Prob 1/3
Goal:
compute stability to diffeo for the output and internal layer representation
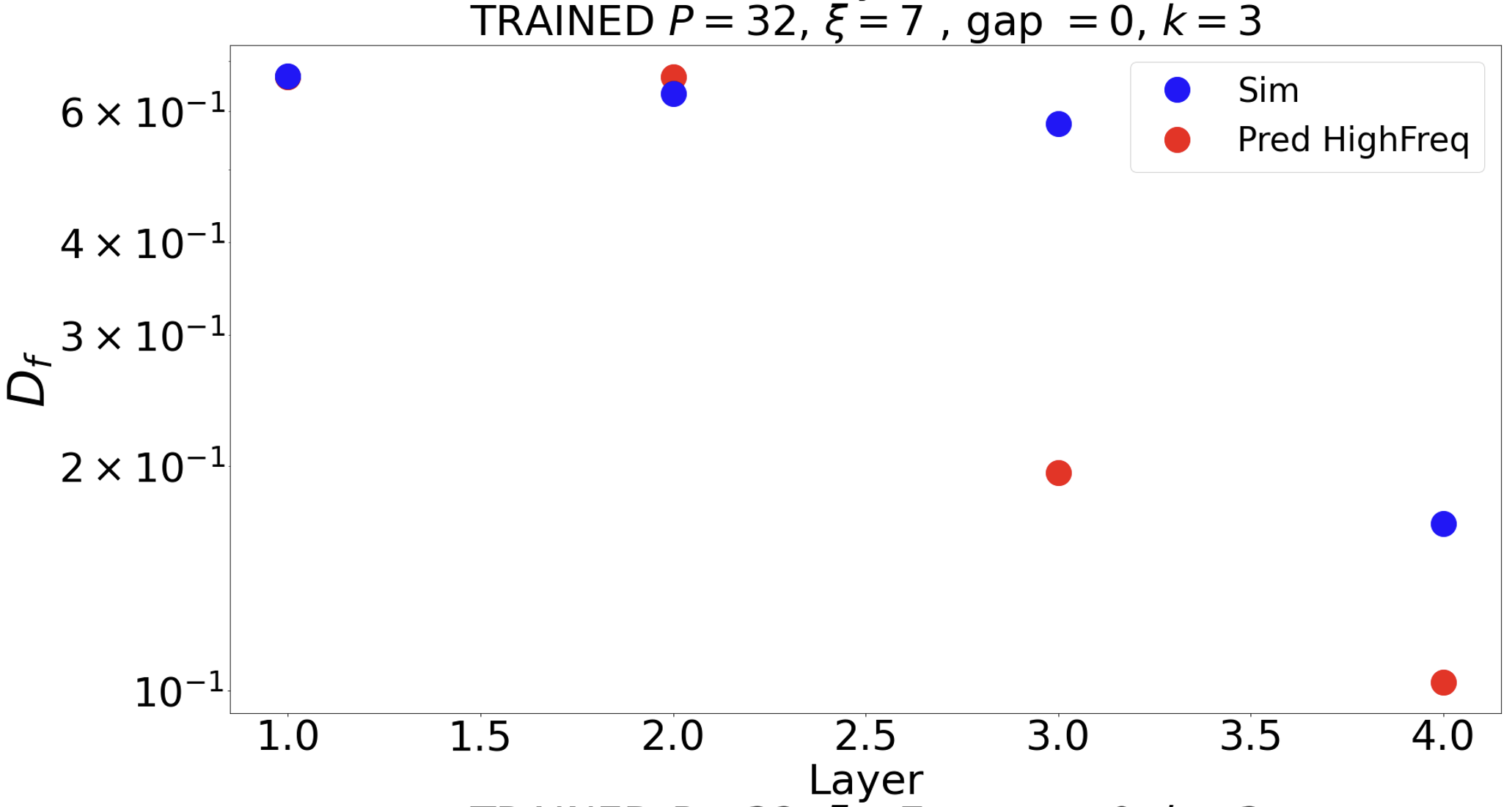
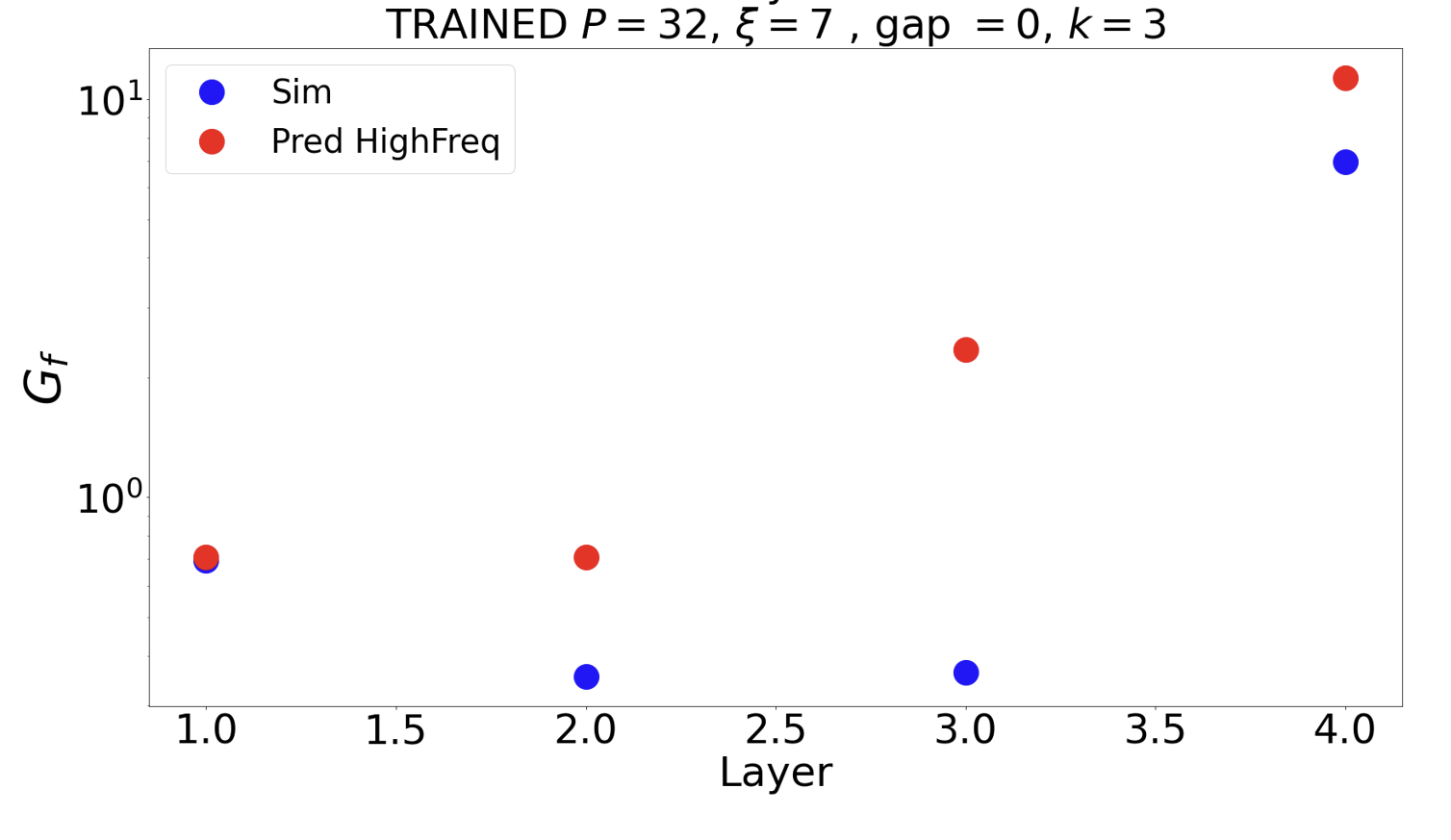
Do the proposed solutions capture CNN solution?
The filters seem are high freq at layer 1.
Computing stability to noise
What does adding noise \(\eta\) do here?
Goal:
compute stability to noise for the output and internal layer representation
where \(\eta_i\) are \(l\) indipendent and identically distributed gaussian noises with mean 0 and standard deviation \(\sigma\) such that:
Do the proposed solutions capture CNN solution?
The filters seem are high freq at layer 1.
Conclusions (theoretical part)
- To do: check the robustness of the result (vary number of channels and \(\xi\) )
- To do: check if we can do better for internal layers >1.
- Once we find the solution, it would show how adaptive pooling is built within the CNN to recognize \(\xi\).