BLISS:
experiments control
of EBS beamlines
presented by Matias Guijarro
Beamline Control Unit, Software Group
ESRF, Grenoble, France

Extremely Brilliant Source (ESRF – EBS) project
- 150 M€ investment over the period 2015-2022
- 4th generation light source
- 100x improved brilliance and coherence of X-ray beams
- New state-of-the-art beamline portfolio
Full details in talk: FRAPL07

BLISS
BeamLine Instrumentation Support Software
Why BLISS ?
spec: 26 years driving experiments at ESRF
-
Direct control of devices
- easier to debug
- restarting = reset
-
Integrated tool
- configuration
- controllers for all kinds of devices
- plotting
- Server mode to connect with external processes (GUI...)
- Commercial support
- Poor macro language
- No extensibility
- Single task operation
- Exclusive hardware control
- Per-session configuration, no sharing
- No built-in continuous scan framework
- Limited data management
- No code ownership, less freedom
spec: 26 years driving experiments at ESRF
Limitations
Workarounds
Maintenance cost
The path to BLISS
-
Python library + tools
-
Technical choices
-
Beacon: services for BLISS
-
Hardware control
-
Scanning & data acquisition
-
Data management
-
Sequences as genuine Python functions
BLISS Python library and tools
BLISS Python library and tools
Embed into any Python program
>>> from bliss.common.axis import Axis
>>> from bliss.controllers.motors import IcePAP
>>> iceid2322 = IcePAP.IcePAP("iceid2322",
{"host": "iceid2322"},
[("mbv4mot", Axis, { "address": 1,
"steps_per_unit": 80,
"velocity": 125,
"acceleration": 500
}
)], [])
>>> iceid2322.initialize()
>>> m = iceid2322.get_axis("mbv4mot")
>>> m.velocity()
125.0
>>> m.acceleration()
500.0
>>> m.position()
252.23750000000001
>>>BLISS Python library and tools
Command Line Interface based on ptpython
matias@kashyyyk:~ % bliss -s test_session
test_session: Executing setup...
Initializing 'heater`
...
Initializing 's1hg`
Done.
>>> ascan(m1, 0, 10, 30, 0.1, diode, save=False)
Total 30 points, 3.0 seconds
Scan 4 Mon Sep 11 11:58:03 2017 <no file> test_session user = guijarro
ascan m1 0 10 30 0.1
# timestamp m1 diode
0 1.50512e+09 0 499.112
1 1.50512e+09 0.345 500.799
...
28 1.50512e+09 9.655 505.622
29 1.50512e+09 10 499.883
BLISS Python library and tools
Configuration web application
BLISS Python library and tools
Graphical interface for users: interactive web shell

BLISS technical choices
BLISS key concepts





All I/O based on gevent
cooperative multi-tasking
Direct hardware control
Distributed control ownership & shared state
Persistent settings
cache
Transient data store
Scan acquisition chain, represented as a tree

BLISS modular architecture



online data analysis
data visualisation
data archiving
Beacon:
services for BLISS
Beacon static configuration service
Web interface for configuration editing
Beacon server
.yml
Devices & sequences configuration in YAML format
Sessions to group
objects
Python setup file
User scripts
Can replace TANGO DB
Conversion script provided
Beacon: example configuration
sybil:~/local/beamline_configuration % tree
.
├── beacon.rdb
├── eh
│ ├── diode.yml
│ ├── __init__.yml
│ └── motors
│ ├── bv.yml
│ ├── DtoX.yml
│ ├── __init__.yml
│ ├── md2.yml
│ ├── mirror1.yml
│ ├── slits.yml
│ └── table.yml
├── oh
│ ├── bpm.yml
│ ├── __init__.yml
│ ├── motors
│ │ ├── bv.yml
│ │ ├── __init__.yml
│ │ ├── mono.yml
│ │ ├── slits.yml
│ │ └── transfocators.yml
│ └── wagos.yml
└── sessions
├── id232_setup.py
├── id232.yml
└── __init__.yml- controller:
class: IcePAP
host: iceid2322
axes:
- name: mbv4mot
address: 1
steps_per_unit: 817
velocity: 0.3
acceleration: 3
bv.yml:
motor object
Beacon dynamic services

Beacon server,
services built on top of

Transient data store
Persistent settings cache
Message broker
- state sharing
- distributed lock

BLISS Hardware Control
Direct hardware control


Management of concurrent access
- Multiple BLISS processes means concurrent access
- distributed control ownership
- based on a protocol: ask Beacon for permission
-
State coherence
- hardware state is shared between all peers via channels
Management of concurrent access
Management of concurrent access
acquire lock
Management of concurrent access
ok !
acquire lock
Management of concurrent access
ok !
move
acquire lock
Management of concurrent access
move
psy1 locked to A
state channels update
BLISS
scans
BLISS scans
-
Acquisition chain
- a tree with master & slave nodes
- master triggers data acquisition
- slave takes data
-
AcquisitionMaster, AcquisitionDevice
- wrappers around BLISS control objects
-
Data writer
- HDF5
Continuous scan example
5
10
m0 position
m0 speed
detector frame triggering
5
10
m0 position
m0 speed
detector frame triggering
Continuous scan example
sybil:~ % bliss
>>> from bliss.scanning.chain import AcquisitionChain
>>> from bliss.scanning.acquisition.motor import SoftwarePositionTriggerMaster
>>> from bliss.scanning.acquisition.lima import LimaAcquisitionDevice
>>> from PyTango.gevent import DeviceProxy
>>> m0 = config.get("m0")
>>> lima_dev = DeviceProxy("id30a3/limaccd/simulation")
>>> chain = AcquisitionChain()
>>> chain.add(SoftwarePositionTriggerMaster(m0, start=5, end=10,
npoints=10, time=5),
LimaAcquisitionDevice(lima_dev, acq_nb_frames=5, acq_expo_time=0.03,
acq_trigger_mode="INTERNAL_TRIGGER_MULTI"))
Continuous scan example
>>> SCAN_SAVING.template = '/data/id23eh2/inhouse/{date}/{sample}'
>>> SCAN_SAVING.sample = 'HAK1234'
>>> SCAN_SAVING.get_path()
"/data/id23eh2/inhouse/20170324/HAK1234"
>>> from bliss.scanning.scan import Scan
>>> my_continuous_scan = Scan(chain)
>>> my_continuous_scan.start()
Classic step-by-step scans
-
Directly available as functions from 'bliss.common.standard'
- Example: ascan(axis, start, stop, npoints, count_time, *counters)
- Example: ascan(axis, start, stop, npoints, count_time, *counters)
- Default acquisition chain
- Use the same underlying framework as continuous scans
Data Management
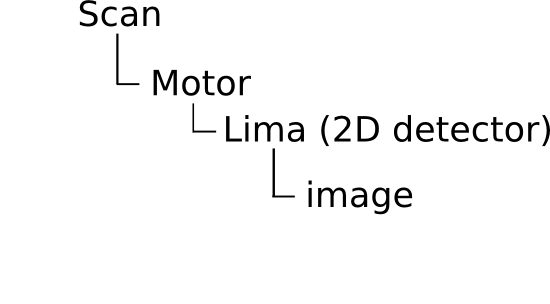
Model for organizing acquired data
-
Mirroring of the Acquisition Chain tree
-
each device in the chain has a name
-
each device define 1 or more 'AcquisitionChannel' objects
-
-
Acquisition channels
-
must have a name, a type and a shape
-
-
Metadata
-
scan_info dictionary ({ key: value, ... }) associated with scans
-
Online data publishing
-
While a scan is running, data is published to the redis database provided by Beacon
-
scalar values are stored directly
-
bigger data (images, spectra) is just referenced
-
configurable time to live (TTL)
-
- Any external process can access redis data to perform online data analysis, for example
![]()
User
Sequences
Sequences as Python functions
from bliss import * # imports generic scans, cleanup functions, etc
from bliss.setup_globals import * # imports objects from session (setup)
import numpy # I know you dreamt of it
import gevent
def set_detector_cover(in):
wcidxx.set('detcover', in)
# 5 seconds timeout waiting for detector cover to move
with gevent.Timeout(5):
while wcidxx.get('detcover_in') == in:
time.sleep(0.1)
def my_super_experiment(name):
safety_shutter.open()
old_att = attenuators.get()
def restore_beamline():
set_detcover_open(False)
attenuators.set(old_att)
with cleanup(safety_shutter.close): # cleanup is always called at the end
with error_cleanup(restore_beamline): # this will only be called in case of error
attenuators.set(50)
set_detcover_open(True)
SCAN_SAVING.name = name
MEASUREMENT_GROUP.enable('diode')
data_node = dscan(m0, -5, 5, 10, 0.1)
for data in data_node.walk_data():
# do something useful with data...Sequences as Python functions
from bliss import * # imports generic scans, cleanup functions, etc
from bliss.setup_globals import * # imports objects from session (setup)
import numpy # I know you dreamt of it
import gevent
def set_detector_cover(in):
wcidxx.set('detcover', in)
# 5 seconds timeout waiting for detector cover to move
with gevent.Timeout(5):
while wcidxx.get('detcover_in') == in:
time.sleep(0.1)
def my_super_experiment(name):
safety_shutter.open()
old_att = attenuators.get()
def restore_beamline():
set_detcover_open(False)
attenuators.set(old_att)
with cleanup(safety_shutter.close):
with error_cleanup(restore_beamline):
attenuators.set(50)
set_detcover_open(True)
SCAN_SAVING.name = name
MEASUREMENT_GROUP.enable('diode')
data_node = dscan(m0, -5, 5, 10, 0.1)
for data in data_node.walk_data():
# do something useful with data...with cleanup(safety_shutter.close): # cleanup is always called at the end
with error_cleanup(restore_beamline): # only called in case of error
...Use of Python context managers for cleanup
Normal Python functions
Easy timeouts with gevent.Timeout
# 5 seconds timeout waiting for detector cover to move
with gevent.Timeout(5):
while wcidxx.get('detcover_in') == in:
time.sleep(0.1)
Conclusion
Project state
-
Current state of deployment
- MX beamlines are already running BLISS
- 3 more beamlines (Materials Science) for the end of the year
- Full deployment in 2020
-
Project is in active development
- Not ready for use outside ESRF yet
- git repository

Conclusion
- Long term project for EBS beamlines
- Control paradigm: keep what works, add new concepts
- Python scanning framework
- Prepared for current and future challenges
- scans with online feedback
- data management
- evolutive platform
Aknowledgements
BLISS core development team
+ ESRF BCU contributing members: A. Beteva, M.C.Dominguez, M. Perez, J. Meyer
ESRF Software Group: A. Goetz
A. Homs
E. Papillon
J. Bodera
C. Guilloud
J. Bodera
M. Guijarro
T. Coutinho
S. Petitdemange
V. Michel