Self Driving Cars
Past - Present - Future


Last updated: 2019/02/16
THe past
The driverless dream begins
It didn’t take long after the birth of the motorcar for inventors to start thinking about autonomous vehicles. In 1925, the inventor Francis Houdina demonstrates a radio-controlled car, which he drives through the streets of Manhattan without anyone at the steering wheel. According to the New York Times, the radio-controlled vehicle can start its engine, shift gears, and sound its horn, “as if a phantom hand were at the wheel.”
John McCarthy’s robo-chauffeur
In 1969, John McCarthy — a.k.a. one of the founding fathers of artificial intelligence — describes something similar to the modern autonomous vehicle in an essay titled “Computer-Controlled Cars.” McCarthy refers to an “automatic chauffeur,” capable of navigating a public road via a “television camera input that uses the same visual input available to the human driver.”
No Hands Across America
In the early 1990s, Carnegie Mellon researcher Dean Pomerleau writes a PhD thesis, describing how neural networks could allow a self-driving vehicle to take in raw images from the road and output steering controls in real time.
ALVINN - Learning to STEER
Text
The Verge - Meet ALVINN, the self-driving car from 1989
RALPH - Adaptive Learning
Text
The Grand Challenge is too challenging
In 2002, DARPA announces its Grand Challenge, offering researchers from top research institutions a $1 million prize if they can build an autonomous vehicle able to navigate 142 miles through the Mojave Desert.
Urban Scenario Using Stereo Vision
Google searches for an answer
Starting in 2009, Google begins developing its self-driving car project, now called Waymo, in secret. The project is initially led by Sebastian Thrun, the former director of the Stanford Artificial Intelligence Laboratory and co-inventor of Google Street View.
THe Present
The big car manufacturers dive in
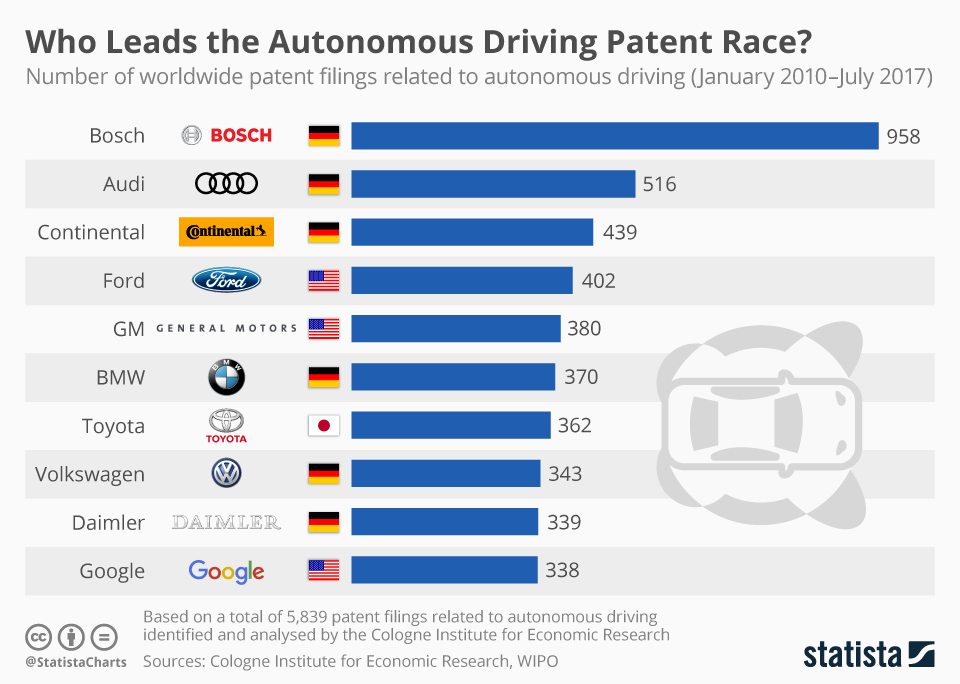
Old and New companies
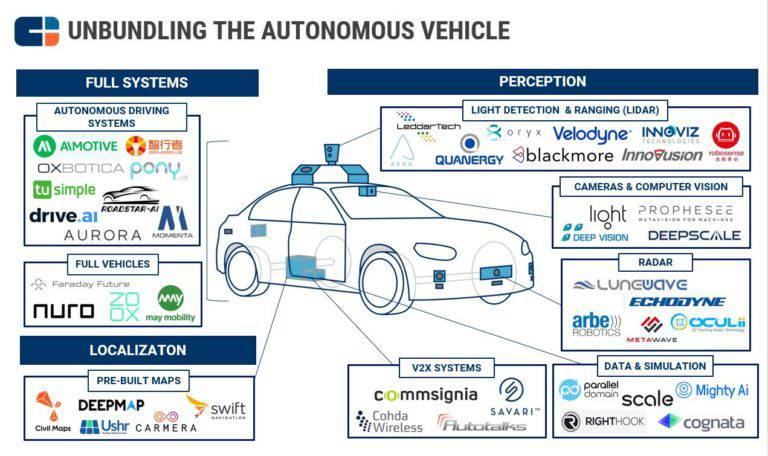
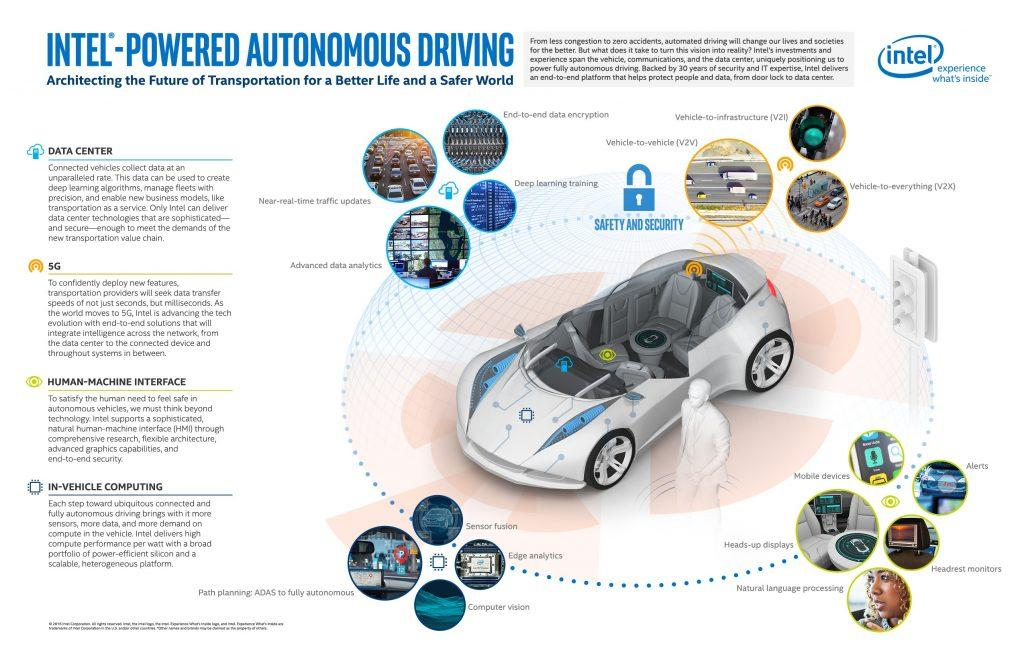
Sensors
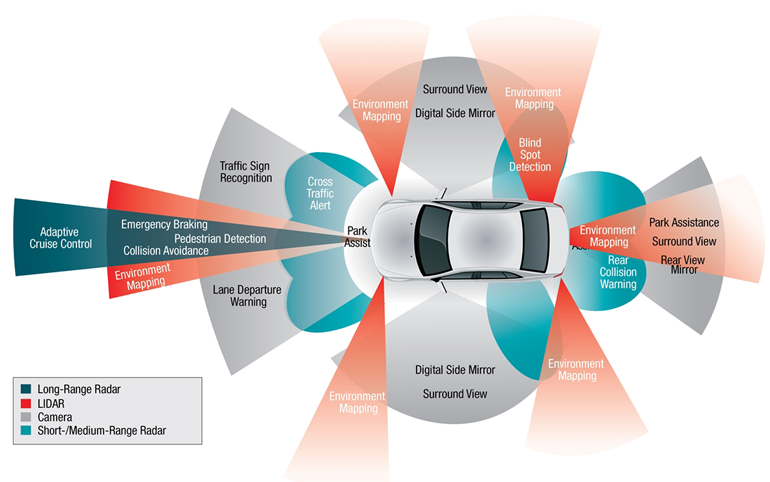
Sensors/Actuators

SUBSYSTEMS and COmmunication
AI comes to self-driving cars
The leaders Trying to impress
OPen SOURCE platforms/INITIATIVES
OPen SOURCE platforms/INITIATIVES (cont)
Safer assisted technology Before full autonomy
The Guardian approach that Toyota Research Institute has been following, will bring safer autonomous systems
Open Source SDC components/platforms will improve collaboration across all participants in this growing industry
THe FUTURE
A fair view
Jack Stilgoe, Associate Professor of Science and Technology Studies at University College London, joins David to discuss improper and irresponsible testing of autonomous vehicles
Self-Driving Cars Won’t Save Cities
Self-Driving cars hold immense technological promise, but they won’t fundamentally solve problems like congestion, at least for now.
End to end NAVIGATION - second try
We define a novel variational network capable of learning from raw camera data of the environment as well as higher level roadmaps to predict (1) a full probability distribution over the possible control commands; and (2) a deterministic control command capable of navigating on the route specified within the map.
Technical Paper: http://arxiv.org/abs/1811.10119
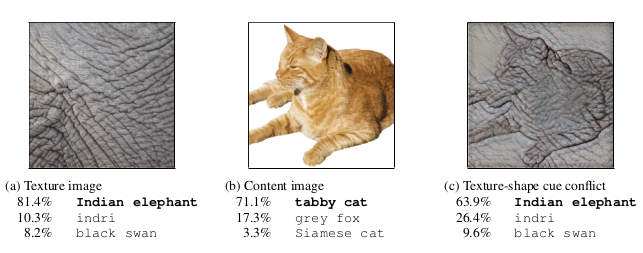
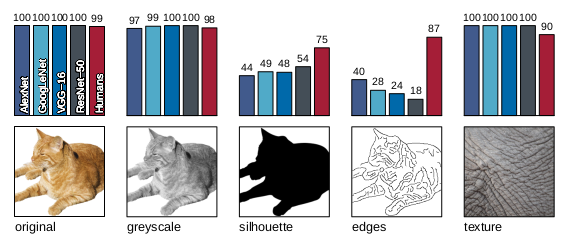
DESIGN BETTER NEURAL networks
Embrace SMART Multi stereo/event cameras
Get involved - JOIN.OSSDC.org
DEMO
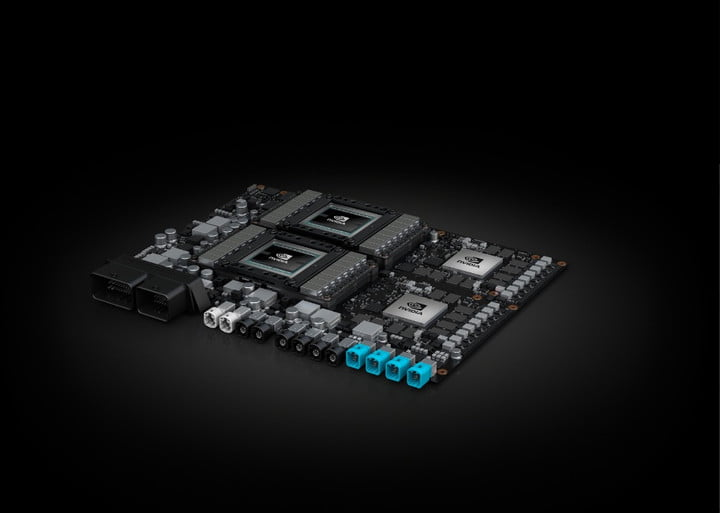
Showcase a few robotics embedded platforms,
Nvidia and Xilinx FPGA based
Keep in Touch
LinkedIn - https://ca.linkedin.com/in/mariusslavescu
Blog - http://raceai.net
Twitter - https://twitter.com/GTARobotics
Reddit - https://www.reddit.com/user/mslavescu
Medium - https://medium.com/@mslavescu
Meetup - https://www.meetup.com/GTA-Robotics/
YouTube - https://www.youtube.com/gtarobotics
Slack - http://join.ossdc.org
GitHub - https://github.com/OSSDC
References
https://medium.com/@mslavescu/from-0-to-60-in-4-weeks-f6463ffe28a9
https://becominghuman.ai/what-is-next-in-ossdc-org-3610f75794f3
https://github.com/OSSDC/OSSDC-Hacking-Book/wiki/Vision-and-Mission
https://www.youtube.com/channel/UCDPC2xnXxgQOFeZb1o185rQ/playlists
https://www.digitaltrends.com/cars/history-of-self-driving-cars-milestones/
https://angel.co/job-collections/top-self-driving-cars-startups
https://www.cbinsights.com/research/startups-drive-auto-industry-disruption/