Dataset Sensitive Autotuning of Multi-Versioned Code based on Monotonic Properties
Autotuning in Futhark

Art by Robert Schenck
Philip Munksgaard, Svend Lund Breddam, Troels Henriksen, Fabian Cristian Gieseke & Cosmin Oancea
A general method for finding the near-optimal* tuning parameters for multi-versioned code
* Subject to some assumptions
A general method for finding the near-optimal* tuning parameters for multi-versioned code
- A way of choosing at run-time between multiple semantically identical but differently optimized versions of code
- Generalizes to all programs that are structured in a similar way
- Is implemented as part of the Futhark project
- Functional languages are ideal for experimenting with generating different code versions
This talk
- Motivation and running example
- Autotuning
- Results
- Related work
let mapscan [m][n] (xss: [m][n]i32) : [m][n]i32 =
map2 (\(row: [n]i32) (i: i32) ->
loop (row: [n]i32) for _ in 0..<64 do
let row' = map (+ i) row
in scan (+) 0 row'
)
xss (0..<m)
An example
let mapscan [m][n] (xss: [m][n]i32) : [m][n]i32 =
map2 (\(row: [n]i32) (i: i32) ->
loop (row: [n]i32) for _ in 0..<64 do
let row' = map (+ i) row
in scan (+) 0 row'
)
xss (0..<m)
An example
Two levels of parallelism
- Outer parallelism
- Degree m
- Inner parallelism
- Degree n
let mapscan [m][n] (xss: [m][n]i32) : [m][n]i32 =
map2 (\(row: [n]i32) (i: i32) ->
loop (row: [n]i32) for _ in 0..<64 do
let row' = map (+ i) row
in scan (+) 0 row'
)
xss (0..<m)
An example
- There could be any number of levels of parallelism in the code
- Hardware has limited number of levels of parallelism
- How do we map code to hardware?
let mapscan [m][n] (xss: [m][n]i32) : [m][n]i32 =
map2 (\(row: [n]i32) (i: i32) ->
loop (row: [n]i32) for _ in 0..<64 do
let row' = map (+ i) row
in scan (+) 0 row'
)
xss (0..<m)
An example
Ways to parallelize
- Parallelize outer, sequentialize inner
- Parallelize inner, sequentialize outer
- There are more ways
let mapscan [m][n] (xss: [m][n]i32) : [m][n]i32 =
map2 (\(row: [n]i32) (i: i32) ->
loop (row: [n]i32) for _ in 0..<64 do
let row' = map (+ i) row
in scan (+) 0 row'
)
xss (0..<m)
An example
Tall matrix?
\(m\) threads, sequential inner code
let mapscan [m][n] (xss: [m][n]i32) : [m][n]i32 =
map2 (\(row: [n]i32) (i: i32) ->
loop (row: [n]i32) for _ in 0..<64 do
let row' = map (+ i) row
in scan (+) 0 row'
)
xss (0..<m)
An example
\(n\) threads,
sequential outer code
Wide matrix?
let mapscan [m][n] (xss: [m][n]i32) : [m][n]i32 =
map2 (\(row: [n]i32) (i: i32) ->
loop (row: [n]i32) for _ in 0..<64 do
let row' = map (+ i) row
in scan (+) 0 row'
)
xss (0..<m)
An example
So which version to use?
Inner or outer?
let mapscan [m][n] (xss: [m][n]i32) : [m][n]i32 =
map2 (\(row: [n]i32) (i: i32) ->
loop (row: [n]i32) for _ in 0..<64 do
let row' = map (+ i) row
in scan (+) 0 row'
)
xss (0..<m)
An example
We don't know at compile-time!
let mapscan [m][n] (xss: [m][n]i32) : [m][n]i32 =
map2 (\(row: [n]i32) (i: i32) ->
loop (row: [n]i32) for _ in 0..<64 do
let row' = map (+ i) row
in scan (+) 0 row'
)
xss (0..<m)
An example
Instead, let's generate multiple versions, and choose at compile-time
Henriksen, Troels, et al. "Incremental flattening for nested data parallelism." Proceedings of the 24th Symposium on Principles and Practice of Parallel Programming. 2019.
Incremental flattening!
Parallelize outer
Parallelize inner
true
false
An example
Incremental flattening!
Parallelize outer
Parallelize inner
true
false
An example
Incremental flattening!
- Generate multiple different versions of code
- Right-leaning tree
- \(p\) was degree of parallelism of left child, but can be any scalar known at run-time
- \(t\) is "user-defined" threshold
true
false
Version 2
true
false
Version 3
Version 1
An example
true
false
Version 2
true
false
Version 3
Version 1
But how do we determine set of \(t\) that gives us best performance, for all datasets?
- Really an optimization problem
- Minimize number of test-runs
Autotuning
Assumptions
- Right-leaning tree, but generalizes to forests
- A single unknown per threshold/branch
- Monotonicity requirement
- Compiler instrumentation
- Representative datasets
Size-invariance
- Size-invariant: During the execution of a certain dataset, \(p_i\) is constant
\(p_1\) can be size-variant and \(p_2\) can be size-invariant on a certain dataset
Analysis is done per-threshold
Size-invariance
Input:
\(p_1\) is height of matrix (\(m\))
So the size is invariant
Size-invariance
What if there's a loop?
What if there's a loop?
loop:
Input:
Still invariant
Size-invariance
Size-invariant tuning
For each dataset, a single code version is best
Therefore, to tune a program on a single dataset, run each code version once and pick thresholds such that the fastest version is executed
To tune a program on multiple datasets, tune individually and combine thresholds, somehow
Autotuning a single dataset
How do we make sure each version is run exactly once?
Program and dataset is given as is, we only control thresholds
Bottom-up traversal of the tuning tree
Autotuning a single dataset
Setting all thresholds to \(\infty\) forces the bottom-most version to run
Autotuning a single dataset
Setting all thresholds to \(\infty\) forces the bottom-most version to run
Autotuning a single dataset
Setting all thresholds to \(\infty\) forces the bottom-most version to run
Autotuning a single dataset
Setting all thresholds to \(\infty\) forces the bottom-most version to run
Autotuning a single dataset
Setting all thresholds to \(\infty\) forces the bottom-most version to run
Autotuning a single dataset
Setting all thresholds to \(\infty\) forces the bottom-most version to run
Autotuning a single dataset
Setting all thresholds to \(\infty\) forces the bottom-most version to run
Autotuning a single dataset
Setting all thresholds to \(\infty\) forces the bottom-most version to run
This allows us to record the run-time of \(v_3\)
With a bit of compiler instrumentation, we can also get information about what \(p_1\) and \(p_2\) was when they were compared against the thresholds
This allows us to pick \(v_2\) next
Autotuning a single dataset
Setting \(t_2 = 100\) (or any value below that) will force execution of \(v_2\)
Autotuning a single dataset
Setting \(t_2 = 100\) (or any value below that) will force execution of \(v_2\)
Autotuning a single dataset
Setting \(t_2 = 100\) (or any value below that) will force execution of \(v_2\)
Autotuning a single dataset
Setting \(t_2 = 100\) (or any value below that) will force execution of \(v_2\)
Autotuning a single dataset
Setting \(t_2 = 100\) (or any value below that) will force execution of \(v_2\)
Autotuning a single dataset
Setting \(t_2 = 100\) (or any value below that) will force execution of \(v_2\)
Autotuning a single dataset
Setting \(t_2 = 100\) (or any value below that) will force execution of \(v_2\)
Now, we can set the threshold \(t_2\) optimally for the bottom-most branch
Any value for \(t_2\) larger than 100 will select \(v_3\). Any value lower than 100 will select \(v_2\)
Thus, the optimal choice is a range:
If \(v_2\) is preferable, \(0 \leq t_2 \leq 100\)
Autotuning a single dataset
To continue tuning, collapse bottom nodes into one and repeat
Autotuning a single dataset
To continue tuning, collapse bottom nodes into one and repeat
We already know the best run-time for \(v_2'\), so we can jump straight to running \(v_1\)
Autotuning multiple datasets
For each dataset, we have found an optimal range for each threshold
We need to combine the tuning results from each dataset
Example:
Dataset 1: \(0 \leq t_2 \leq 100\) is optimal
Dataset 2 : \(50 < t_2 \leq \infty\) is optimal
Intersecting those ranges, \(50 < t_2 \leq 100\) is optimal for both datasets!
Autotuning multiple datasets
But is there always a valid intersection?
Example:
Dataset 1: \(0 \leq t_2 \leq 100\)
Dataset 2: \(500 < t_2 \leq \infty\)
Monotonicity assumption
\(p_1\) represents parallelism of \(v_1\)
If \(v_1\) is faster than \(v_2\) for a given value of \(p_1\), it should also be faster for larger values
\(p_1\) could represent something else, but we assume that the same property holds
Monotonicity assumption
Besides, if no range intersection exists, no choice of \(t_2\) will choose the best code version for all datasets
Size-invariant tuning
This method allows us to optimally tune size-invariant programs using exactly \(n \times d\) runs
\(n\): number of code versions
\(d\): number of datasets
loop:
But the size can change
Size-variance
loop:
But the size can change
Input:
This program is size-variant!
Size-variance
loop:
Size-variance
When the program is size-invariant, there is always a single best version of the code for each dataset
Always prefer \(v_1\) for this dataset
loop:
Size-variance
When the program is size-variant, there is not always a single best version of the code for each dataset
When \(p_1\) is \(5\) or \(50\), prefer \(v_1\) otherwise prefer \(v_2\)
Size-variant tuning
loop:
It's no longer enough to run each code version once for each dataset
Each dataset does not necessarily have a single best code version
Input:
Size-variant tuning
loop:
Each dataset does not necessarily have a single best code version
Best for \(p_2 = 50, 100\)
Best for \(p_2 = 5\)
Result is still a range, and combining results is still the same, but how do we efficiently find the best range for each dataset?
Size-variant tuning
loop:
Best for \(p_2 = 50, 100\)
Best for \(p_2 = 5\)
Only values in \(\{0, 5, 50, 100, \infty\}\) are relevant to test
There could be many values. A loop that iterates a million times?
Binary search!
Size-variant tuning
loop:
Best for \(p_2 = 50, 100\)
Best for \(p_2 = 5\)
Binary search!
Measure
Measure
Measure
Gradient
Assuming such a gradient exists!
Size-variant tuning
If a gradient exists, we find the optimal tuning range for a single dataset and threshold in \(O(\log p)\) runs
\(p\): number of distinct parameter values for the given threshold
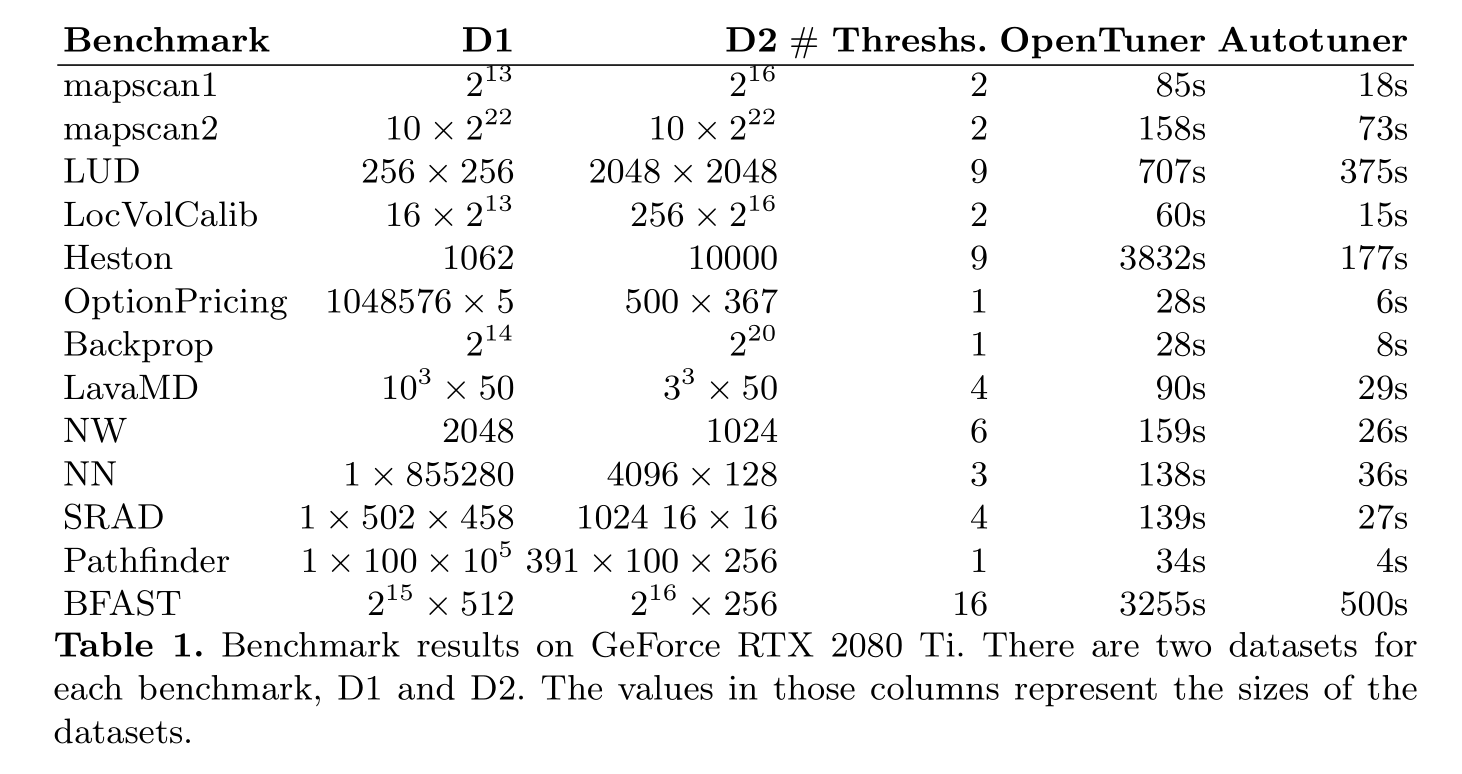
Results
Compare to previous tuning tool, based on OpenTuner
- Black box
- No knowledge of program structure
- Explores enormous search space
- Optimized with memoization
Tuning-time Results
Performance of tuned program
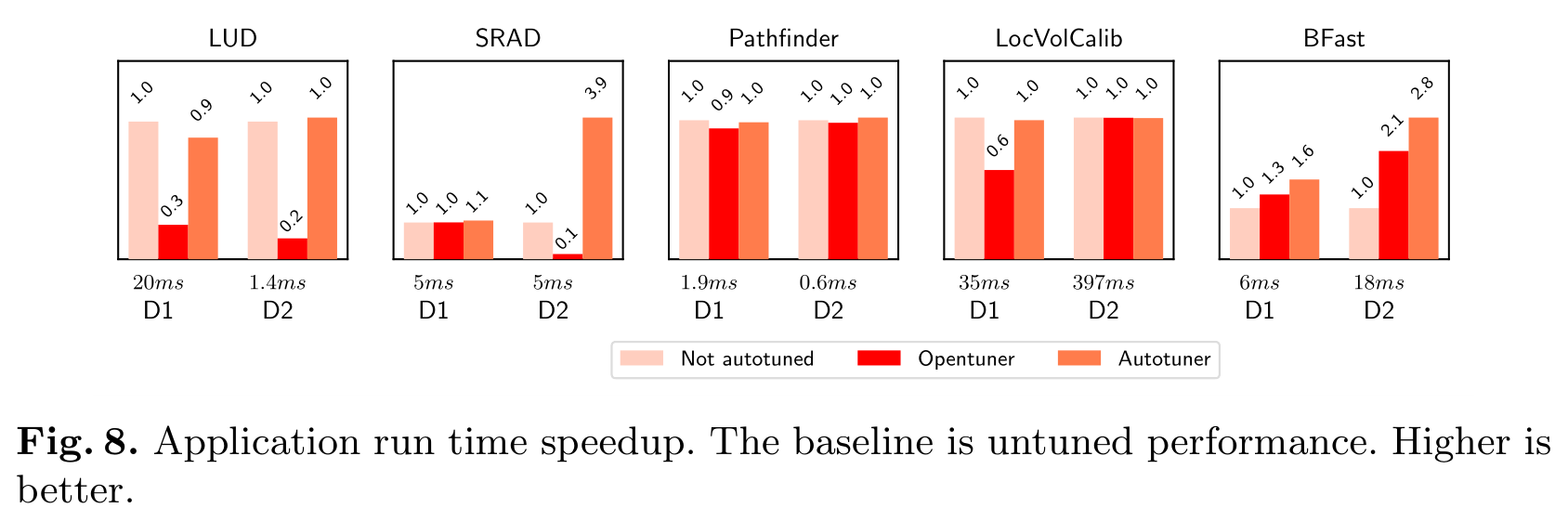
Only benchmarks which have different performance
Reliable even for programs with small number of thresholds
Other approaches
- Tune compiler flags for best average performance\(^1\)
- Multi-versioned compilation, tune for a single dataset on specific hardware
- LIFT\(^{3,4}\), SPIRAL\(^5\)
- General black-box tuning
- OpenTuner\(^6\)
- FURSIN, Grigori, et al. Milepost gcc: Machine learning enabled self-tuning compiler. International journal of parallel programming, 2011, 39.3: 296-327.
- STEUWER, Michel, et al. Generating performance portable code using rewrite rules: from high-level functional expressions to high-performance OpenCL code. ACM SIGPLAN Notices, 2015, 50.9: 205-217.
- HAGEDORN, Bastian, et al. High performance stencil code generation with Lift. In: Proceedings of the 2018 International Symposium on Code Generation and Optimization. 2018. p. 100-112.
- FRANCHETTI, Franz, et al. SPIRAL: Extreme performance portability. Proceedings of the IEEE, 2018, 106.11: 1935-1968.
- ANSEL, Jason, et al. Opentuner: An extensible framework for program autotuning. In: Proceedings of the 23rd international conference on Parallel architectures and compilation. 2014. p. 303-316.
Conclusion
Our technique combines multi-versioned compilation with a one-time autotuning process producing one executable that selects the most efficient combination of code versions for any dataset.
- Co-design between compiler and tuner
- One variable per threshold
- Maybe there is no intersection
- But in practice it works
Thank you for listening