Programming for Sculptors
ARTS-A0407 – Digital Sculpture 3 (2cr)
Lecture 5, 23.1.2020
Today:
- Examples
- A bit about conditional statements and variables
- Assignment 2
Examples: Kati Hyyppä
Documentation: https://niklasroy.com/jai_faim/
Hyyppä's Vimeo channel: https://vimeo.com/user29829839
and website: http://katihyyppa.com/
Examples: Eun Young Park
List of examples by Matti Niinimäki (https://learn.mansteri.com/en/c/efa/efa007/)
- Niklas Roy – Berlin-based artist working a lot with mechanical devices
- Teija ja Pekka Isorättyä – Finnish artist couple working with robotic installations
- Tommi Grönlund & Petteri Nisunen – Finnish artists working with kinetic sculptures
- Jeppe Hein – Very minimalistic installations using kinetic elements
- ART+COM – A German design studio that specializes in creating big kinetic sculptures
- Ben Hopson – An industrial designer who has a lot of very interesting Kinetic Sketches on his website.
- Theo Jansen – Amazing wind-powered artificial creatures
Controlling a servo with an Arduino 2
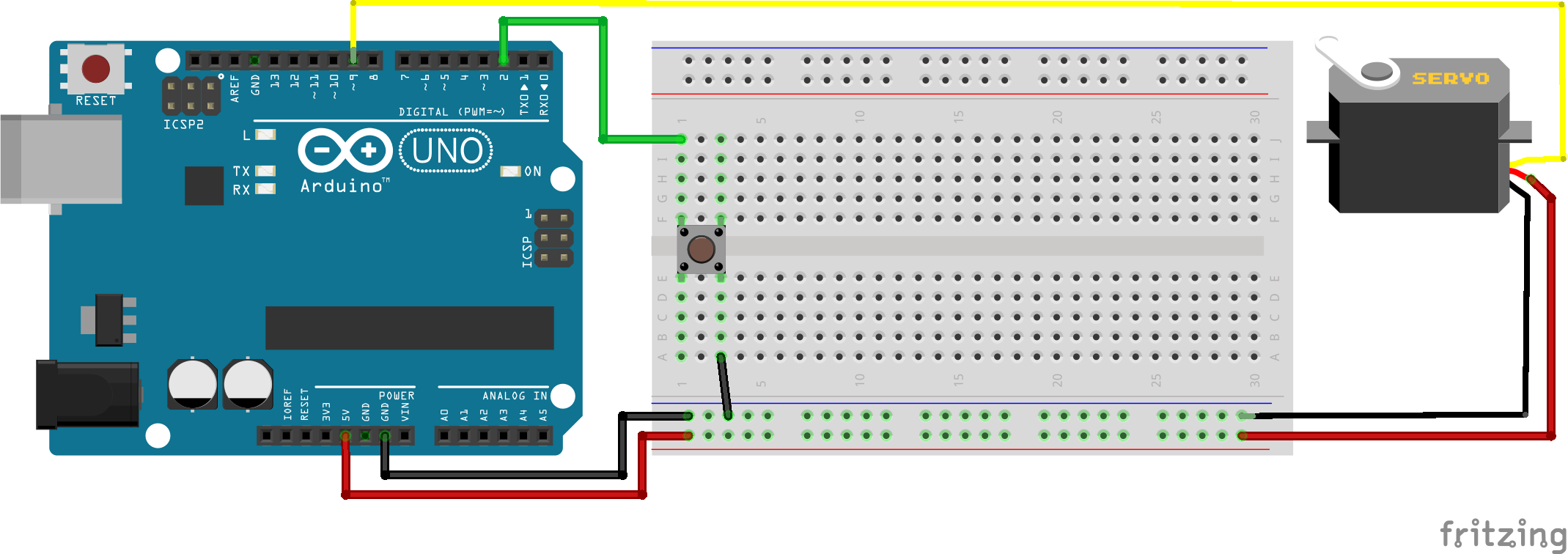
Let's code a program that starts a servo sequence when a button is clicked and stops the sequence on the next click.
#include <Servo.h>
int BUTTON_PIN = 2;
int SERVO_PIN = 9;
Servo myservo;
bool buttonClicked = false;
bool runServo = false;
unsigned int nextServoMovement = 0;
void setup() {
Serial.begin(9600);
myservo.attach(SERVO_PIN);
pinMode(BUTTON_PIN, INPUT_PULLUP);
}
void loop() {
bool buttonState = digitalRead(BUTTON_PIN);
if ( buttonState == LOW && buttonClicked == false) {
Serial.println("Button clicked");
runServo = !runServo;
buttonClicked = true;
} else if (buttonState == HIGH) {
buttonClicked = false;
}
if (runServo) {
unsigned long now = millis();
if (now > nextServoMovement) {
myservo.write(random(180));
nextServoMovement = now + 500;
}
}
}
Assignment 2
Poem with movement, project ideas

Animating with movement
Movement as a character
Implement one element of a kinetic sound sculpture
Record motors with a contact mic
Assgnment 2
Let's start working today. Submit your work on Wednesday 29.1. after class. If your work is unfinished we can discuss if you should continue working on it on the final project.
Submission: Record a video, send a link to the video and a short description by email to otso.havanto@aalto.fi
Try to find an electronic battery operated device (for example a toy) for the circuit bending/toy hacking workshop on Thursday 30.1.