The LASSO:
least absolute shrinkage and selection operator
Pierre Ablin
12/03/2019
Parietal Tutorial
Overview
- Linear regression
- The Lasso model
- Non-smooth optimization: proximal operators
Supervised learning
GOAL: Learn \( f \) from some realizations of \( (\mathbf{x}, y) \)
Linear regression
GOAL: Learn \( f \) from some realizations of \( (\mathbf{x}, y) \)
Assumption:
\(f\) is linear
GOAL: Learn \( \beta \) from some realizations of \( (\mathbf{x}, y) \)
Maximum likelihood?
For one sample, if we observe \( \mathbf{x}_{\text{obs}}\) and \( y_{\text{obs}} \) , we have:
i.e. :
Maximum likelihood?
For one sample, if we observe \( \mathbf{x}_{\text{obs}}\) and \( y_{\text{obs}} \) , we have:
If we observe a whole dataset of \(N\) i.i.d. samples$$ (\mathbf{x}_1,y_1), \cdots, (\mathbf{x}_N, y_N) \enspace, $$
the likelihood of this observation is:
maximum likelihood estimator:
Matrix interlude
Define the \(\ell_2\) norm of a vector:
$$|| \mathbf{v}|| = \sqrt{\sum_{n=1}^N v_n^2}$$
And note in condensed matrix form:
$$ \mathbf{y} = [y_1,\cdots, y_N]^{\top} \in \mathbb{R}^N$$
Then,
M.L.E.
Pros:
- Consistant: as \( N \rightarrow \infty \), \(\beta_{\text{MLE}} \rightarrow \beta^* \)
- Comes from a clear statistical framework
- Can behave badly when the model is mispecified (e.g. \(f\) is not really linear)
- Lots of variance in \(\beta_{\text{MLE}}\) when \(N\) is not big enough
- Ill posed problem when \(N < P\) !
Cons:
What do we do when n < p?
Bet on sparsity / Ockham's razor: only a few coefficients in \( \beta \) play a role
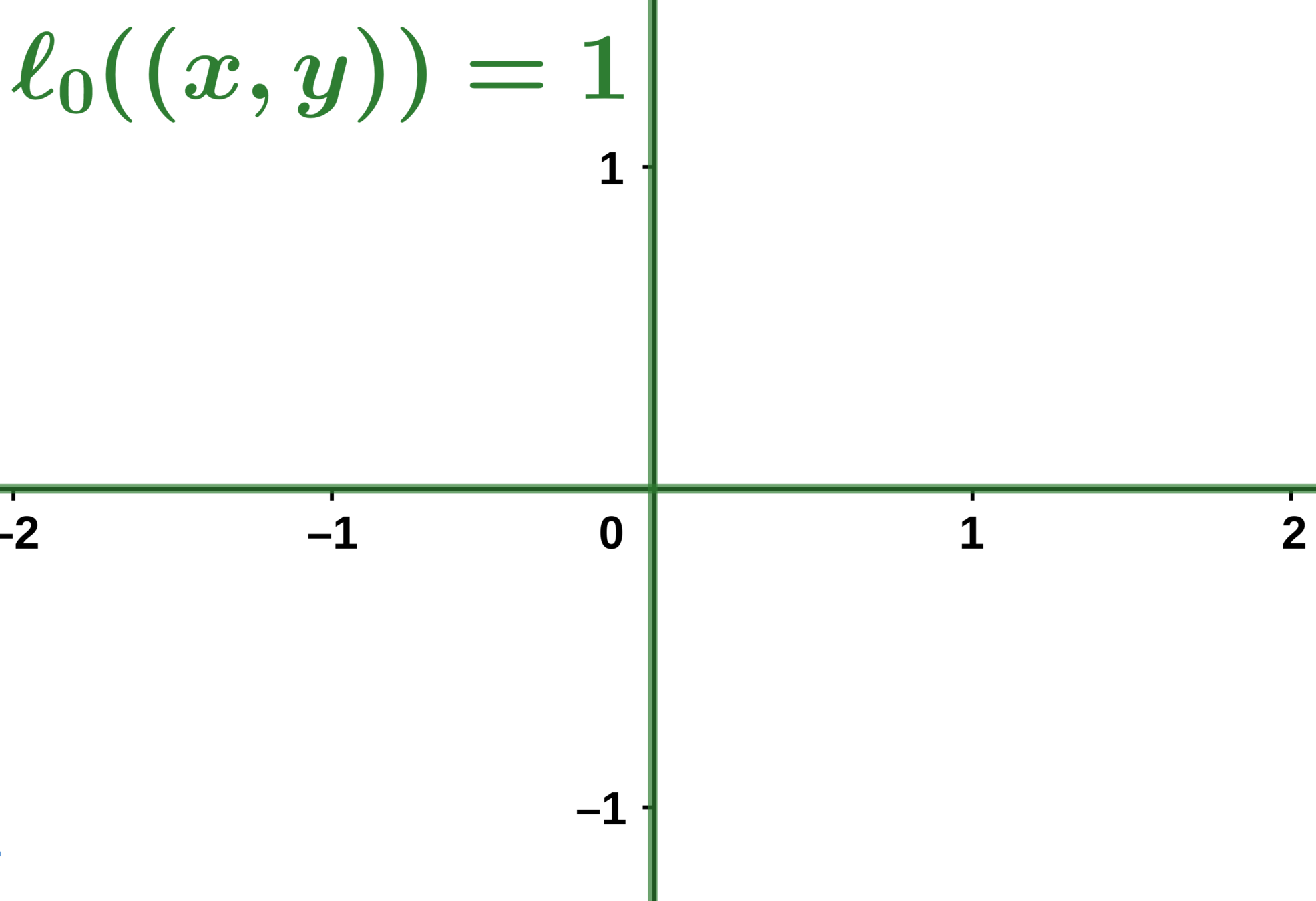
The \( \ell_0 \) Norm:
Example:
Subset selection/matching pursuit
Idea: select only a few active coefficients with the \( \ell_0 \) norm.
Where \( t\) is an integer controlling the sparsity of the solution.
- Non-convexity
- Instability: adding a sample may completely change \( \beta \) and its support.
- NP-Hard (loooong to solve)
Problems:
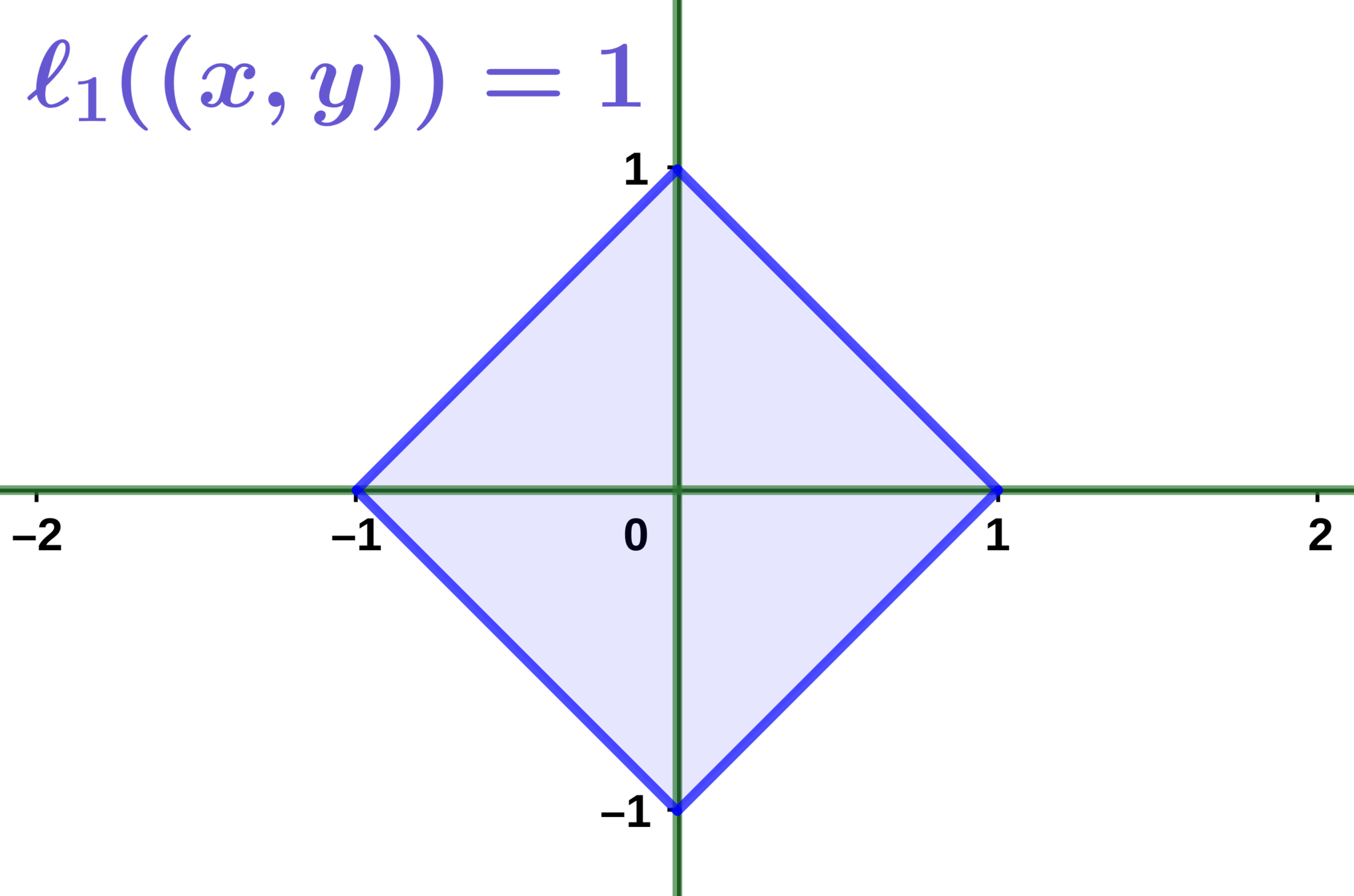
The Lasso
Idea: relax the \(\ell_0\) norm to obtain a convex problem
Where \( t\) is a level controlling the sparsity of the solution.
See notebook
The Lasso: Lagrange formulation
Where \( \lambda \) is a level controlling the amount of sparsity.
- Relationship between \(\lambda\) and \(t\) depends on the data
- It promotes sparsity: there is a threshold \(\lambda_{\text{max}}\) such that \( \lambda >\) \(\lambda_{\text{max}}\) implies \(\beta_{\text{lasso}} = 0 \)
Derivation
\(\beta = 0\) is a solution to the lasso if:
Where \(\partial \) is the subgradient.
So the condition writes:
Lasso is useful because...
- It performs at the same time model selection and estimation : it tells you which coefficients in \(\mathbf{x}\) are important.
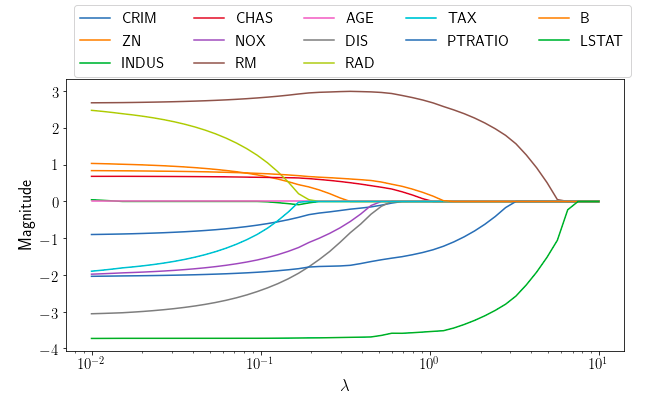
Boston dataset:
Lasso is useful because...
- Leveraging sparsity enables fast solvers
If \(p = 1000 \) and \(n = 1000 \), computing \(X\beta\) takes \(\sim n \times p = 10^6 \) operations
Intuition:
But if we know that there are only \(10 \) non-zero coefficients in \(\beta\), it takes only \(\sim 10^4\) operations
The same reasoning applies to most quantities useful to estimate the model
Lasso estimation
how do we fit the model?
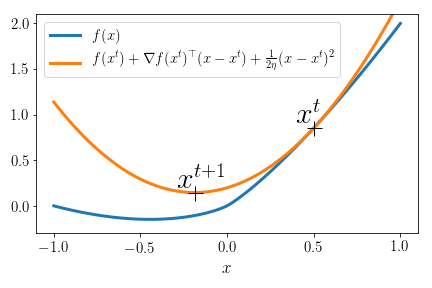
Gradient descent 101
Minimize \( f(\mathbf{x})\) where \(f\) is differentiable.
Iterate \(\mathbf{x}^{t+1} = \mathbf{x}^t - \eta \nabla f(\mathbf{x}^t) \)
Equivalent to minimizing a quadratic surrogate:
The simplest lasso:
\(P=1, N = 1, X = 1:\) can we minimize \(\frac12 (y - \beta)^2 + \lambda |\beta|\) ?
Yes: proximity operator
Soft-thresholding:
- \(0\) if \(|y|\leq \lambda\)
- \(y- \lambda\) if \(y>\lambda\)
- \(y + \lambda\) if \(y < -\lambda\)
Soft thresholding
- \(0\) if \(|y|\leq \lambda\)
- \(y- \lambda\) if \(y>\lambda\)
- \(y + \lambda\) if \(y < -\lambda\)
Separability:
ISTA: Iterative soft threshdolding algorithm
Gradient of the smooth term:
ISTA:
Comes from:
ISTA: Iterative soft threshdolding algorithm
- Some coefficients are \(0\) because of the prox
- One iteration takes \(O(\min(N, P) \times P)\)
Can be problematic for large \(P\) !
COORDInate descent
Idea : update only one coefficient of \( \beta \) at each iteration.
- If we know the residual \( \mathbf{r} =X\beta^{t} - \mathbf{y}\), each update is \(O(n) \) :)
Residual update:
After updating the coordinate \(j\):
\( \beta^{t+1}_i = \beta^{t}_i \) for \( i \enspace \ne j \)