Phase-Type Models in
Life Insurance
Dr Patrick J. Laub
Université Lyon 1



Example Markov process
Sojourn times
Sojourn times are the random lengths of time spent in each state

Phase-type definition
Markov process State space
- Initial distribution
- Sub-transition matrix
- Exit rates
Example
Markov process State space
Phase-type generalises...
- Exponential distribution
- Sums of exponentials (Erlang distribution)
- Mixtures of exponentials (hyperexponential distribution)
Phase-type properties
Matrix exponential
Density and tail
Moments
Laplace transform
More cool properties
Closure under addition, minimum, maximum
... and under conditioning
When to use phase-type?
Your problem has "flowchart" structure.
"Coxian distribution"

"Calendar" Age
"Physical" age
X.S. Lin & X. Liu (2007) , M. Govorun, G. Latouche, & S. Loisel (2015).
Class of phase-types is dense
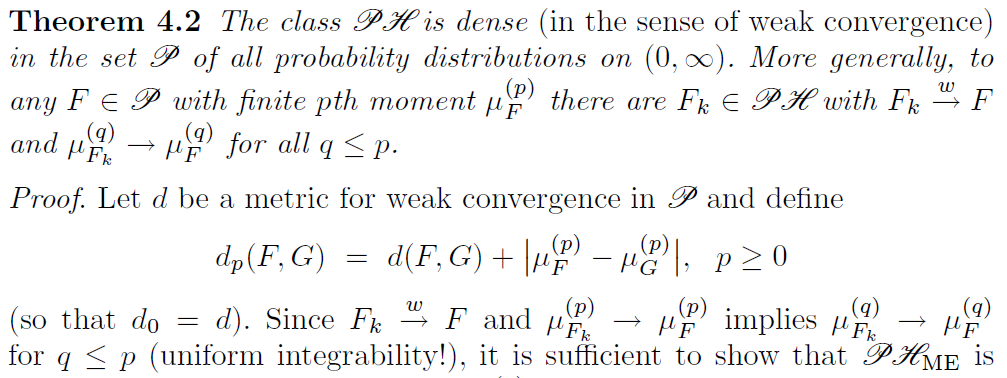
S. Asmussen (2003), Applied Probability and Queues, 2nd Edition, Springer
Class of phase-types is dense










Guaranteed Minimum Death Benefit
Application
Equity-linked life insurance
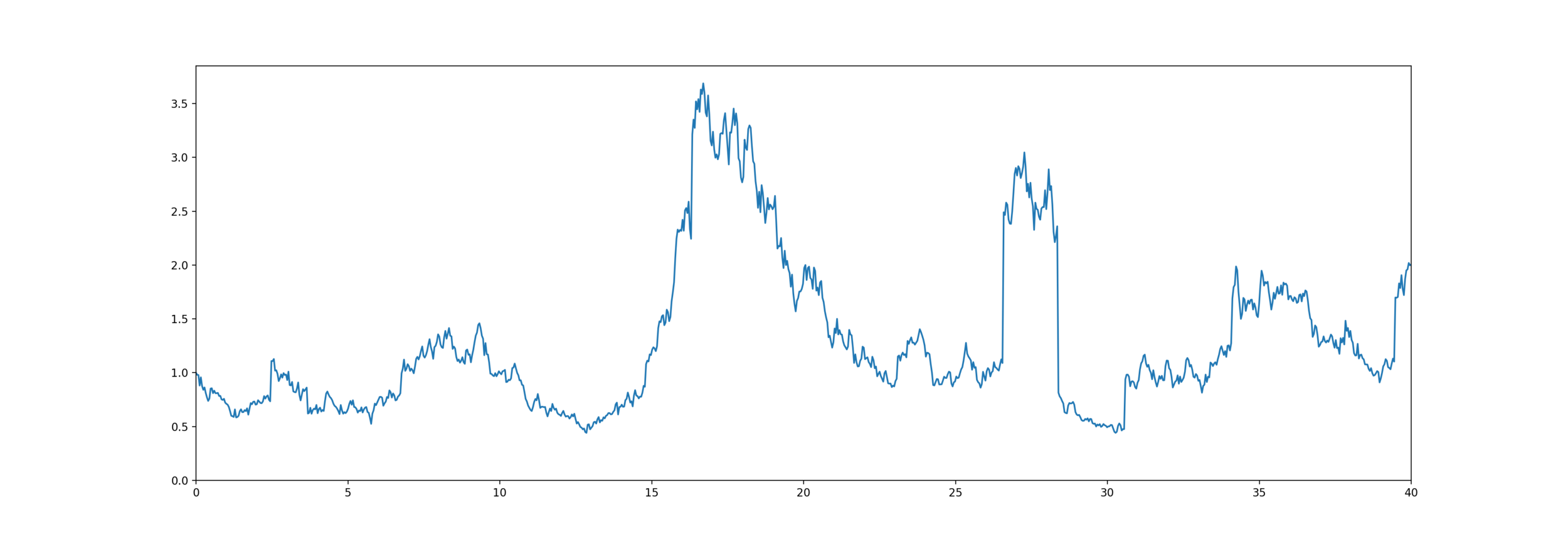
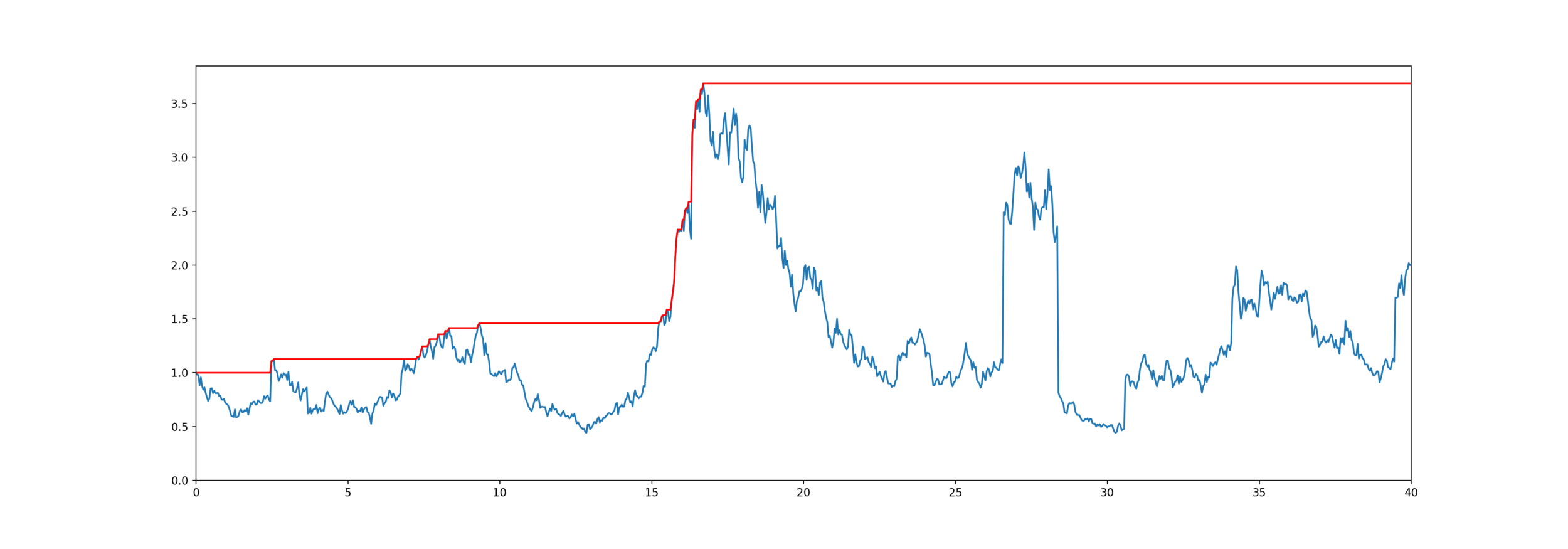
High Water Death Benefit
Equity-linked life insurance
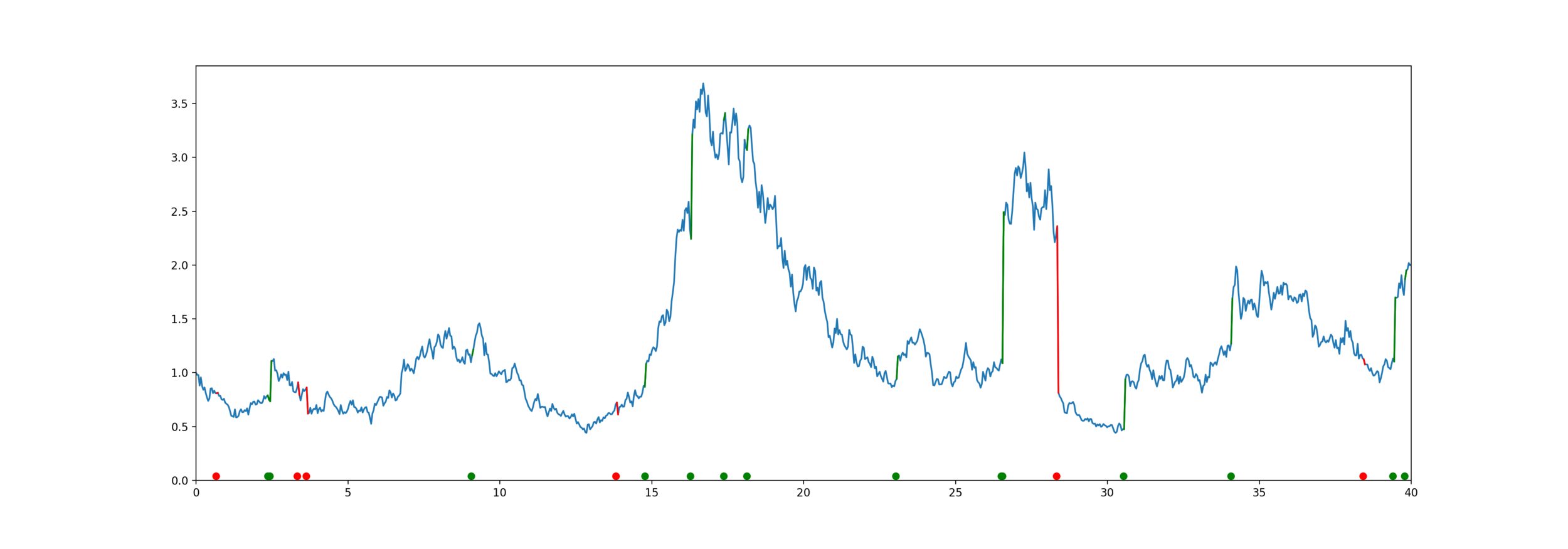
Model for mortality and equity
The customer lives for years,
The stock price is an exponential jump diffusion,
Exponential PH-Jump Diffusion
How to fit them?
Observations:
Derivatives?
Model (p.d.f.):
How to fit them?
Hidden values:
\(B_i\) number of MC's starting in state \(i\)
\(Z_i\) total time spend in state \(i\)
\(N_{ij}\) number of transitions from state \(i\) to \(j\)
C to Julia
void rungekutta(int p, double *avector, double *gvector, double *bvector,
double **cmatrix, double dt, double h, double **T, double *t,
double **ka, double **kg, double **kb, double ***kc)
{
int i, j, k, m;
double eps, h2, sum;
i = dt/h;
h2 = dt/(i+1);
init_matrix(ka, 4, p);
init_matrix(kb, 4, p);
init_3dimmatrix(kc, 4, p, p);
if (kg != NULL)
init_matrix(kg, 4, p);
...
for (i=0; i < p; i++) {
avector[i] += (ka[0][i]+2*ka[1][i]+2*ka[2][i]+ka[3][i])/6;
bvector[i] += (kb[0][i]+2*kb[1][i]+2*kb[2][i]+kb[3][i])/6;
for (j=0; j < p; j++)
cmatrix[i][j] +=(kc[0][i][j]+2*kc[1][i][j]+2*kc[2][i][j]+kc[3][i][j])/6;
}
}
}
This function: 116 lines of C, built-in to Julia
Whole program: 1700 lines of C, 300 lines of Julia
# Run the ODE solver.
u0 = zeros(p*p)
pf = ParameterizedFunction(ode_observations!, fit)
prob = ODEProblem(pf, u0, (0.0, maximum(s.obs)))
sol = solve(prob, OwrenZen5())https://github.com/Pat-Laub/EMpht.jl
Lots of parameters to fit
- General
- Coxian distribution
In general, representation is not unique
A twist on the Coxian form
Canonical form 1
Problem: to model mortality via phase-type
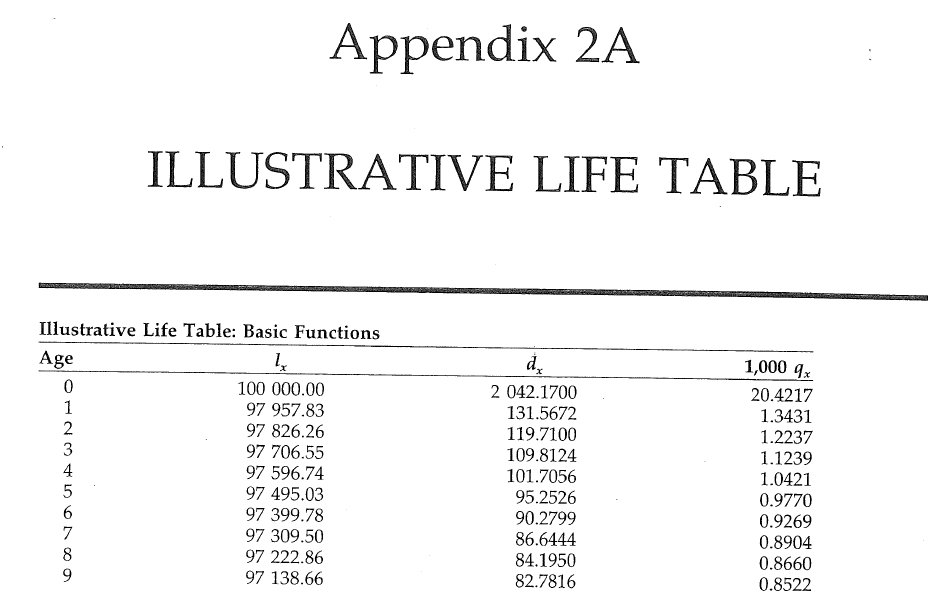
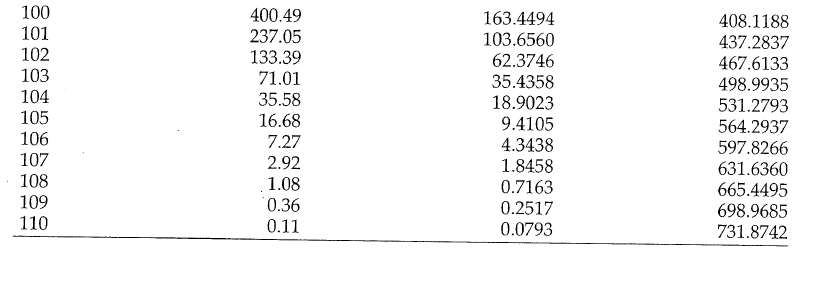
Bowers et al (1997), Actuarial Mathematics, 2nd Edition
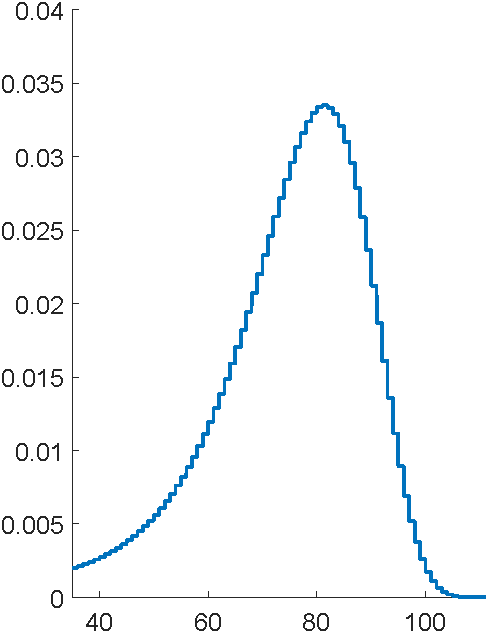
Final fit

using Pkg
using EMpht
lt = EMpht.parse_settings("life_table.json")[1]
phCF200 = empht(lt, p=200, ph_structure="CanonicalForm1")Heavy-tailed modeling?
Phase-types are always light-tailed

Can 'splice' together a Franken-distribution
Norwegian fire data


Take logarithms

Take logarithms and shift
logClaims = log.(claims)
logClaimsCentered = logClaims .- minimum(logClaims) .+ 1e-4
~, int, intweight = bin_observations(logClaimsCentered, 500)
sInt = EMpht.Sample(int=int, intweight=intweight)
ph = empht(sInt, p=5)

logClaims = log.(claims)
logClaimsCentered = logClaims .- minimum(logClaims) .+ 1e-4
~, int, intweight = bin_observations(logClaimsCentered, 500)
sInt = EMpht.Sample(int=int, intweight=intweight)
ph = empht(sInt, p=40)Take logarithms and shift

Questions?
https://slides.com/plaub/l2

Why does that work?
Can make a phase-type look like a constant value

