Object Detection and Classification Approaches
Literature Review and Comparative Study
Table of Contents
- What is Object Detection
- Modern Deep Learning Approaches
- Object Detection in Side-Scan Sonar (SSS)
- Comparison of Methods for SSS
- Evaluation Metrics
- Preliminary Results
- Future Work
What is Object Detection
- Object detection and classification are fundamental tasks in computer vision, used in applications like facial recognition, autonomous driving, medical imaging, and defense systems.
- Object Detection: Identifies objects in images, providing bounding boxes.
- Classification: Assigns labels to detected objects.
Modern Deep Learning Approaches
- Modern approaches leverage neural networks for improved accuracy and scalability.
- Single-Shot Detection (SSD) vs Dual-Shot Detection.
- YOLO (You Only Look Once): Ideal for high-speed detection, though less effective for smaller objects.
- Region-Based CNNs (R-CNN):High accuracy but slower. Faster R-CNN introduces region proposal networks for better speed.
- Mask R-CNN: Adds segmentation capabilities, enhancing shape analysis at a higher computational cost.
Object Detection in SSS
- SSS images present unique challenges due to noise, low resolution, and texture variability.
- Challenges: High noise levels, shape and texture similarities, and limited annotated data.
Comparison of Methods for SSS
- Real-Time Performance: YOLO excels in speed, suitable for real-time detection, while Faster R-CNN is better for accuracy in complex scenes.
- Multi-Object Detection: Faster R-CNN handle cluttered scenes effectively.
- Noise Adaptability: Domain adaptation and fine tuning techniques are essential for SSS, addressing noise and data scarcity.
Evaluation Metrics
-
Classification Metrics:
- Accuracy:Proportion of correct predictions.
- Precision & Recall: Balance false positives and false negatives.
- F1 Score: Harmonic mean of precision and recall.
-
Object Detection Metrics:
- IoU (Intersection over Union): Measures overlap between predicted and true bounding boxes.
- mAP (Mean Average Precision): Precision averaged across classes and IoU thresholds.
- Detection Speed: Frames per second (FPS), crucial for real-time tasks.
- The dataset contains 1170 side-scan sonar images collected using a 900–1800 kHz Marine Sonic dual frequency side-scan sonar of a Teledyne Marine Gavia Autonomous Underwater Vehicle (AUV) .
- All the images were carefully analyzed and annotated, including the image coordinates of the Bounding Box (BB) of the detected objects divided into NOn-Mine-like BOttom Objects (NOMBO) and MIne-Like COntacts (MILCO) classes
Dataset
| Date | Images | MILCO | NOMBO |
|---|---|---|---|
| 2010 | 345 | 22 | 12 |
| 2015 | 120 | 238 | 175 |
| 2017 | 93 | 28 | 2 |
| 2018 | 564 | 95 | 46 |
| 2021 | 48 | 49 | 0 |
Table 1. Summary of the dataset.
Dataset
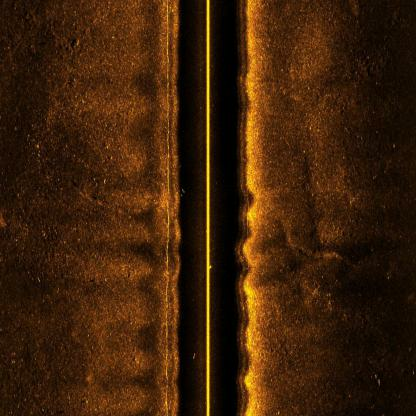
Non mine image
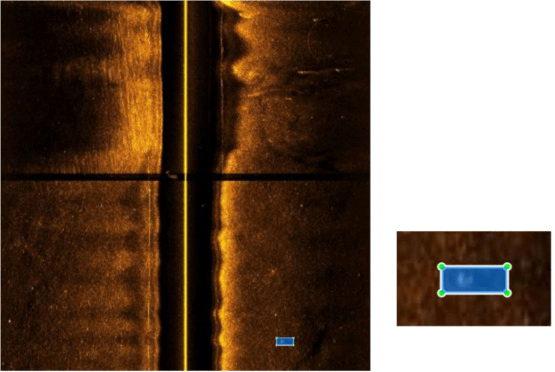
Mine image
Preliminary Results
- Initial experiments on sonar datasets reveal key insights:
- Dataset Details: 825 sonar images split into 80% training and 20% testing.
-
Classification Results:
- Before Training: Accuracy of 0.27, indicating poor performance.
- After Training: Improved accuracy (0.91) with a ResNet-based classifier.
- Detection Challenges: Pretrained YOLOv8 struggled with noisy SSS data, emphasizing the need for domain adaptation and fine-tuning.
Future Work
- Future efforts aim to address current limitations:
- Enhanced Datasets: Include diverse, annotated sonar images to improve training.
- Synthetic Data Generation:Augment datasets with realistic synthetic images.
- Advanced Models: Explore fine-tuned YOLO and R-CNN variants for SSS data.
- These steps will enhance model reliability and accuracy in real-world applications.