1.7 Sigmoid Neuron
The building block of Deep Neural Networks
Recap: Six jars
What we saw in the previous chapter?
(c) One Fourth Labs
\( \in \mathbb{R} \)
Classification
Loss
Model
Data
Task
Evaluation
Learning
Real inputs
Boolean Output
Perceptron Learning Algorithm
Some thoughts on the contest
Just some ramblings!
(c) One Fourth Labs
We should create the binary classification monthly contest such that we can somehow visualize that the data is not linearly separable (don't know how)
We should also be able to visualize why the perceptron model is not fitting
Also give them some insights into what does the loss function indicate and how to make sense of it
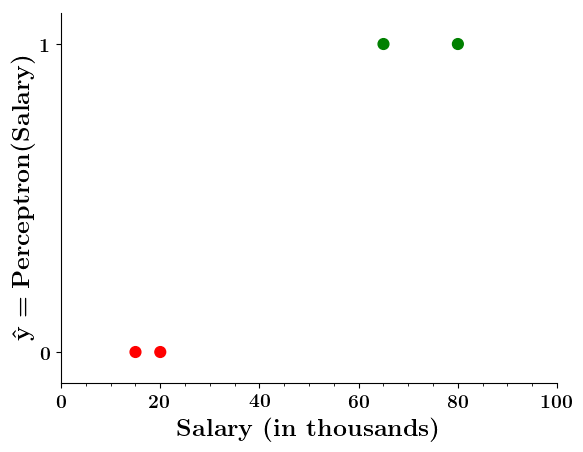
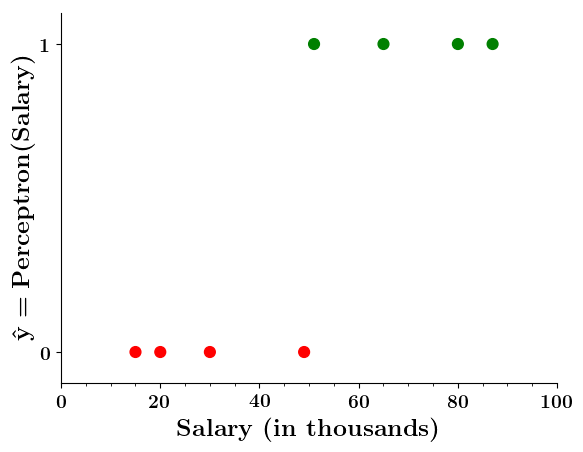
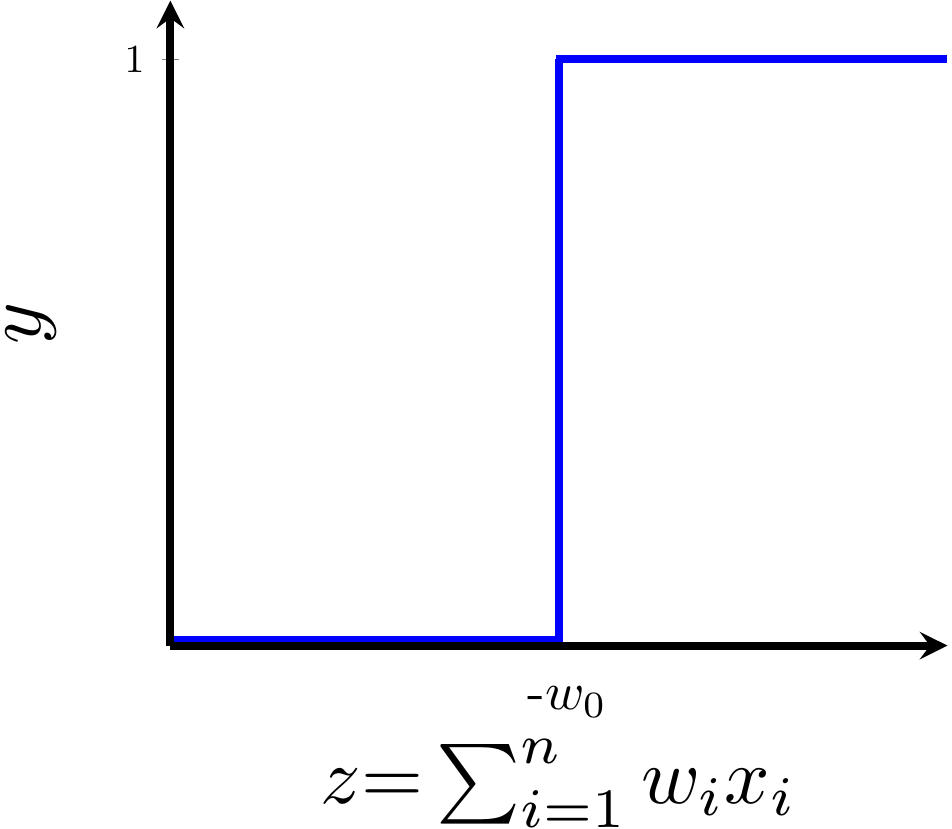
Limitations of Perceptron
Can we plot the perceptron function ?
(c) One Fourth Labs

Wait a minute!
| Salary ( in thousands) | Can buy a car? |
|---|---|
| 80 | 1 |
| 20 | 0 |
| 65 | 1 |
| 15 | 0 |
| 30 | 0 |
| 49 | 0 |
| 51 | 1 |
| 87 | 1 |
Doesn't the perceptron divide the input space into positive and negative halves ?
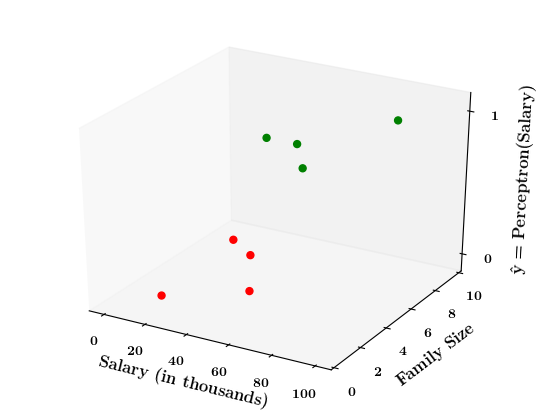
Limitations of Perceptron
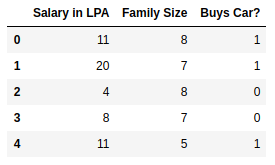
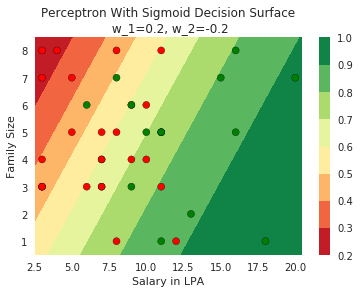
How does the perceptron function look in 2 dimensions?
(c) One Fourth Labs
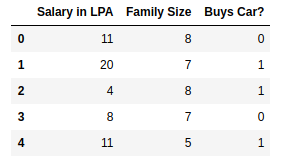
| Salary (in thousands) | Family size | Can buy a car? |
|---|---|---|
| 80 | 2 | 1 |
| 20 | 1 | 0 |
| 65 | 4 | 1 |
| 15 | 7 | 0 |
| 30 | 6 | 0 |
| 49 | 3 | 0 |
| 51 | 4 | 1 |
| 87 | 8 | 1 |
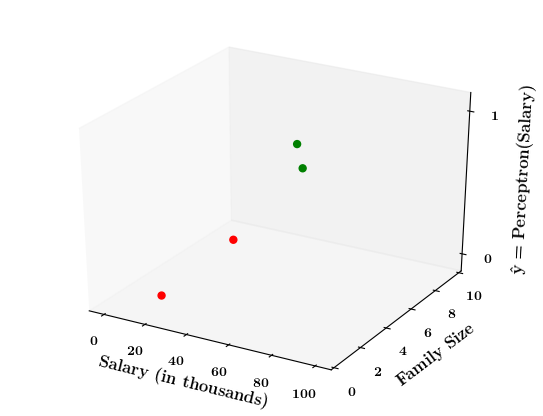
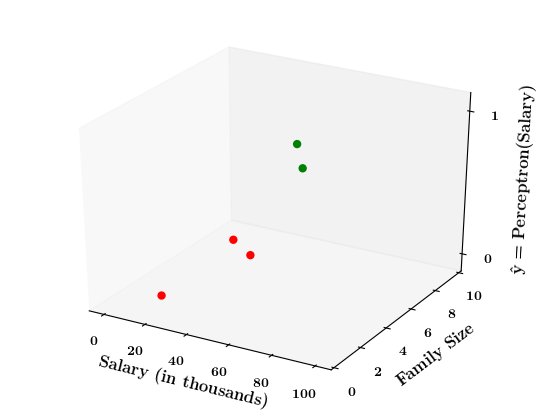
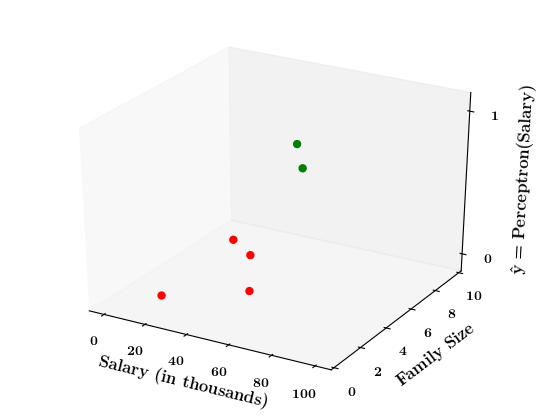
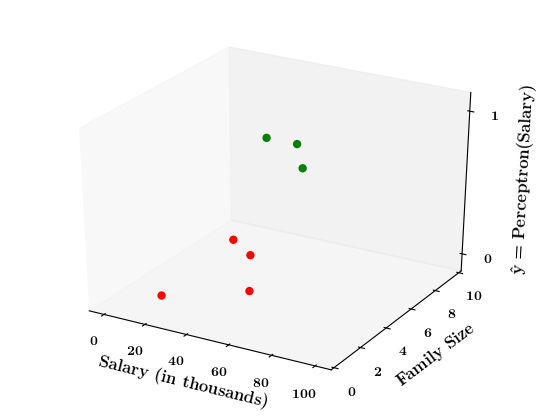

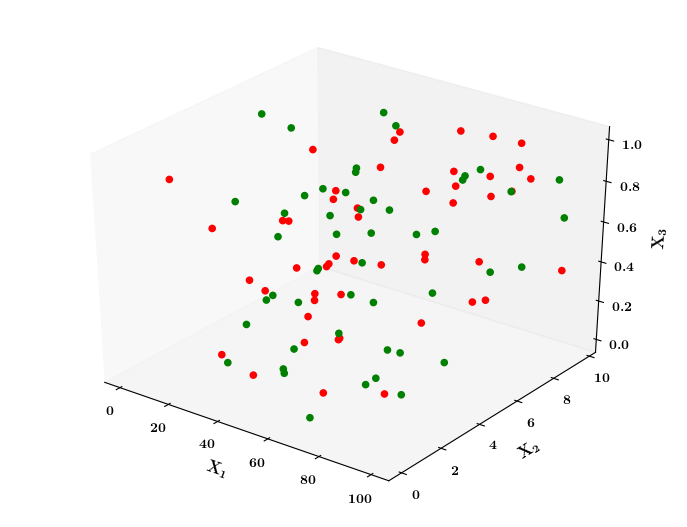
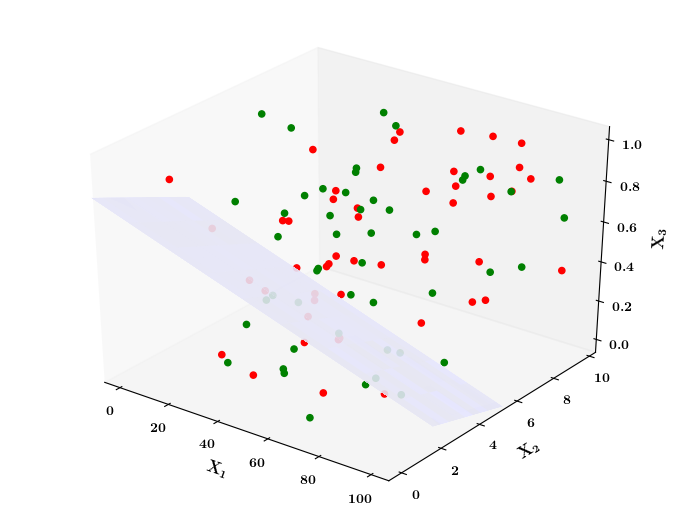
Limitations of Perceptron
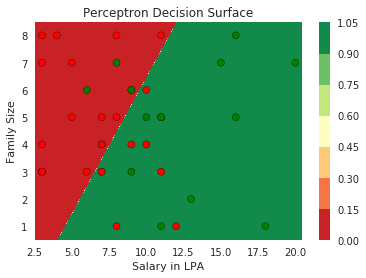
What if the data is not linearly separable ?
(c) One Fourth Labs

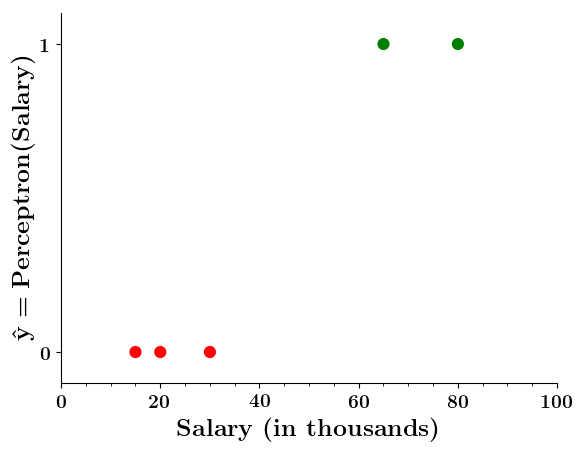
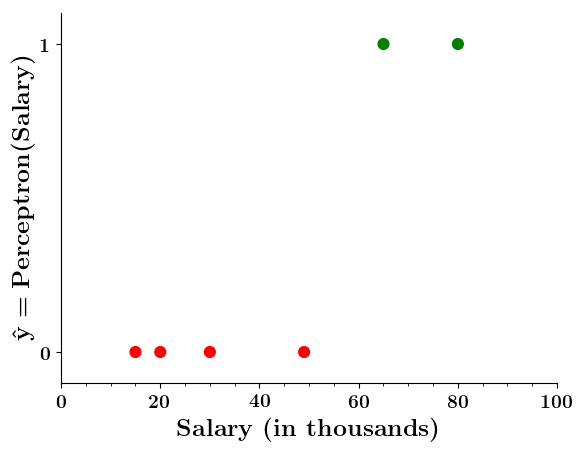
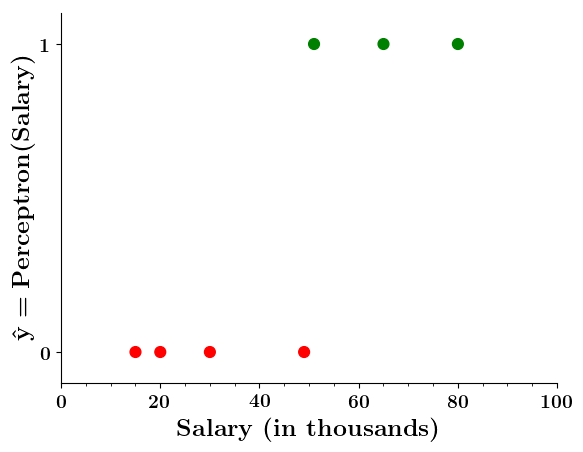
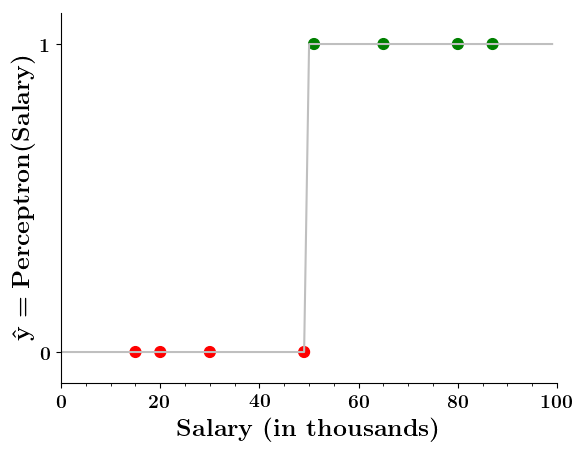
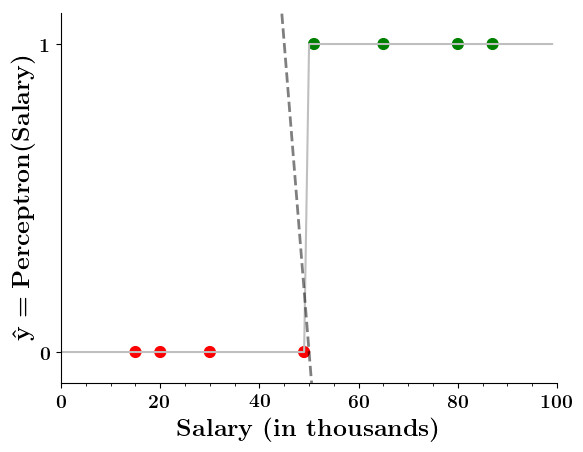
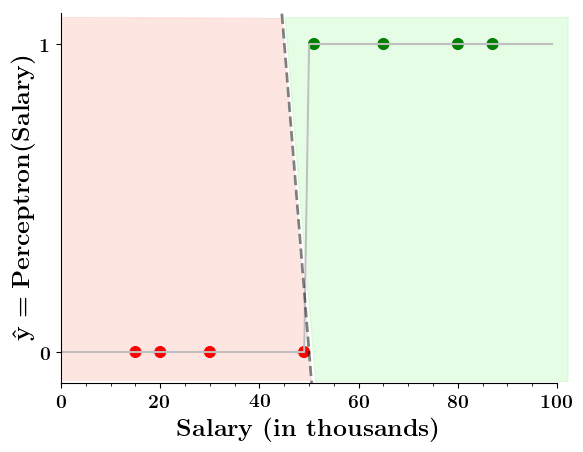
Limitations of Perceptron
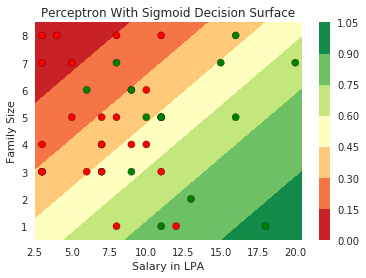
Isn't the perceptron model a bit harsh at the boundaries ?
(c) One Fourth Labs
Isn't it a bit odd that a person with 50.1K salary will buy a car but someone with 49.9K will not buy a car ?
| Salary ( in thousands) | Can buy a car? |
|---|---|
| 80 | 1 |
| 20 | 0 |
| 65 | 1 |
| 15 | 0 |
| 30 | 0 |
| 49 | 0 |
| 51 | 1 |
| 87 | 1 |
(c) One Fourth Labs
The Road Ahead
What's going to change now ?
(c) One Fourth Labs
\( \{0, 1\} \)
Boolean
Loss
Model
Data
Task
Evaluation
Learning
Linear
Real inputs
Boolean output
Specific learning algorithm
Harsh at boundaries
Real output
Non-linear
A more generic learning algorithm
Smooth at boundaries
Data and Task
What kind of data and tasks can Perceptron process ?
(c) One Fourth Labs
Data and Task
What kind of data and tasks can Perceptron process ?
(c) One Fourth Labs
Real inputs
| Launch (within 6 months) | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | 1 |
| Weight (g) | 151 | 180 | 160 | 205 | 162 | 182 | 138 | 185 | 170 |
| Screen size (inches) | 5.8 | 6.18 | 5.84 | 6.2 | 5.9 | 6.26 | 4.7 | 6.41 | 5.5 |
| dual sim | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 1 | 0 |
| Internal memory (>= 64 GB, 4GB RAM) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| NFC | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 1 |
| Radio | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| Battery(mAh) | 3060 | 3500 | 3060 | 5000 | 3000 | 4000 | 1960 | 3700 | 3260 |
| Price (INR) | 15k | 32k | 25k | 18k | 14k | 12k | 35k | 42k | 44k |
| Like (y) | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 0 |









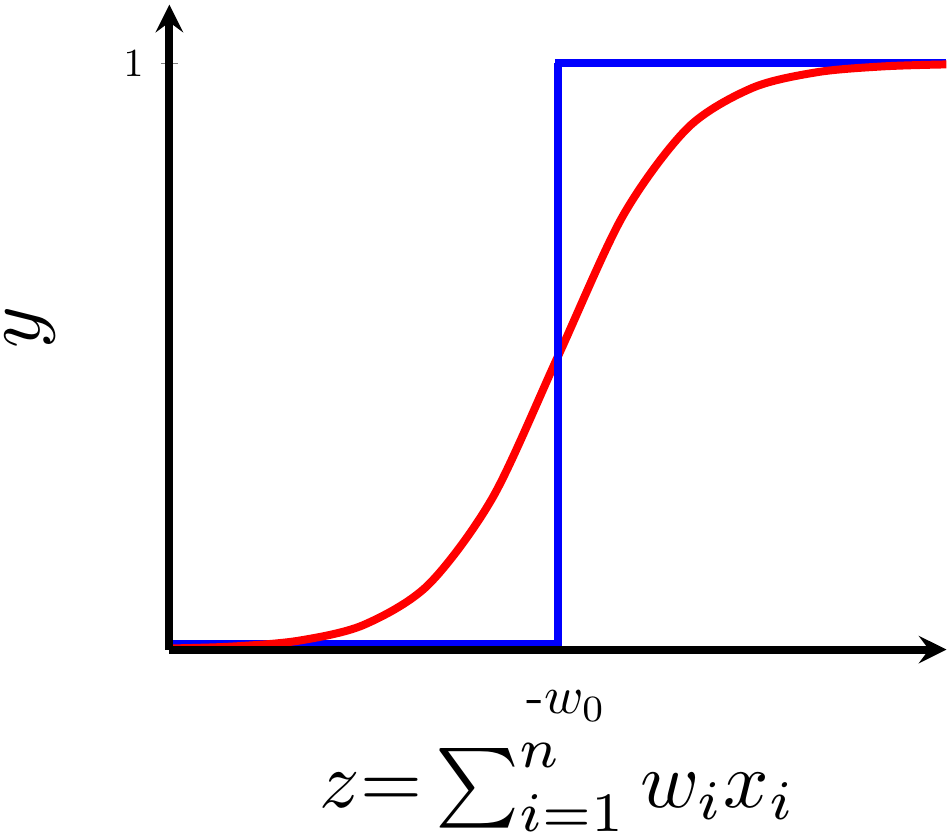
Model
Can we have a smoother (not-so-harsh) function ?
(c) One Fourth Labs

Model
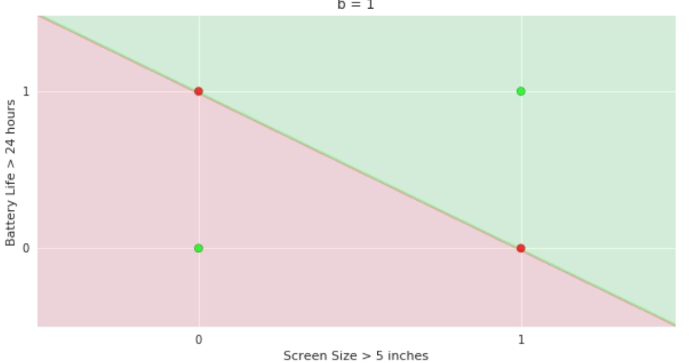
What happens when we have more than 1 input ?
(c) One Fourth Labs
| Launch (within 6 months) | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | 1 |
| Weight (<160g) | 1 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 |
| Screen size (<5.9 in) | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 |
| dual sim | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 1 | 0 |
| Internal memory (>= 64 GB, 4GB RAM) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| NFC | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 1 |
| Radio | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| Battery(>3500mAh) | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 |
| Price > 20k | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 1 |
| Like (y) | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 0 |
| Launch (within 6 months) | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | 1 |
| Weight (<160g) | 1 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 |
| Screen size (<5.9 in) | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 |
| dual sim | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 1 | 0 |
| Internal memory (>= 64 GB, 4GB RAM) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| NFC | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 1 |
| Radio | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| Battery(>3500mAh) | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 |
| Price > 20k | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 1 |
| Like (y) | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 0 |
| Prediction | 0 | 0 | 1 | 0 | 0 | 1 | 1 | 1 | 0 |
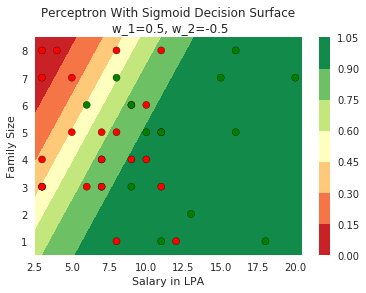
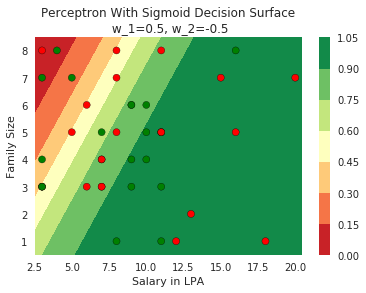
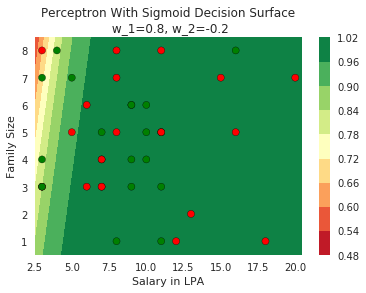
Model
How does this help when the data is not linearly separable ?
(c) One Fourth Labs
Still does not completely solve our problem but we will slowly get there!
2. Show the sigmoid model equations here

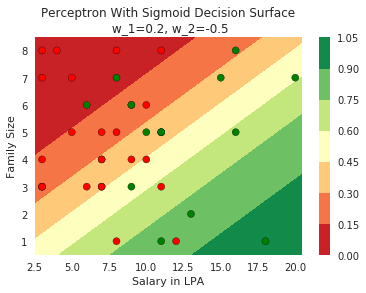
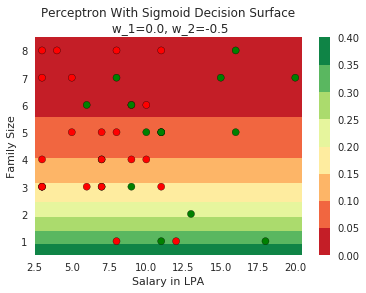
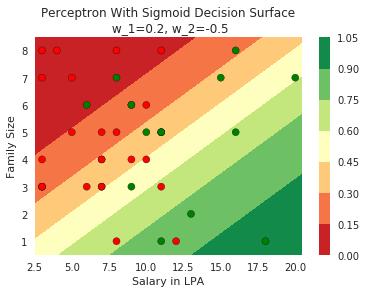
Model
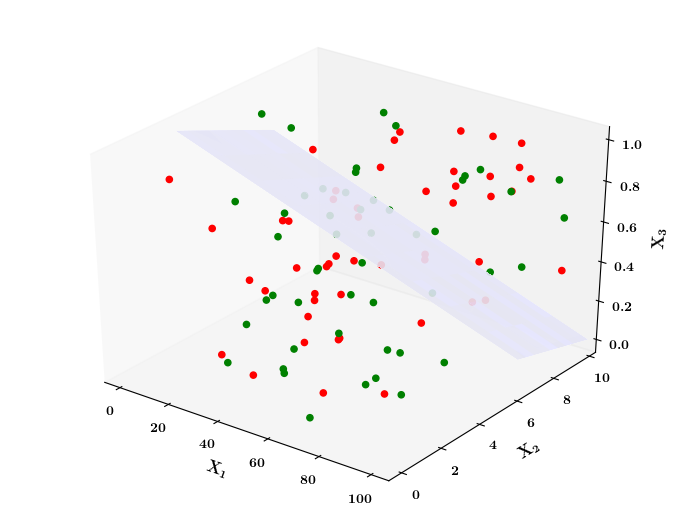
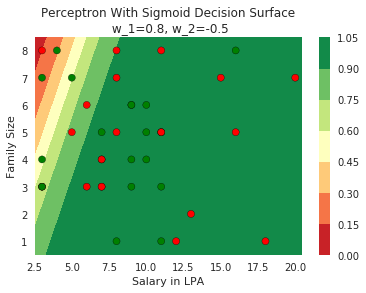
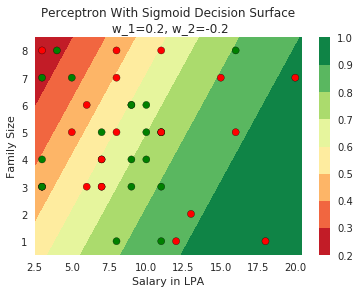
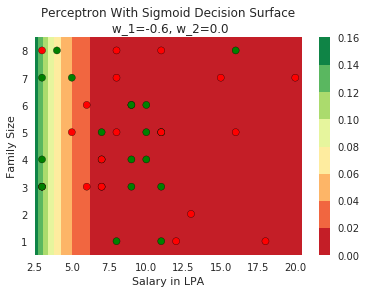
What about extreme non-linearity ?
(c) One Fourth Labs
Still does not completely solve our problem but we will slowly get there with more complex models!
1.Now show a case where the blue and red points are completely mixed with each other
2. show that no matter how you adjust w_1 and w_2 you will not be able to find any separation between blue and red points
3. Now show the quote at RHS bottom using our cartoon person
2. Show the sigmoid model equations here

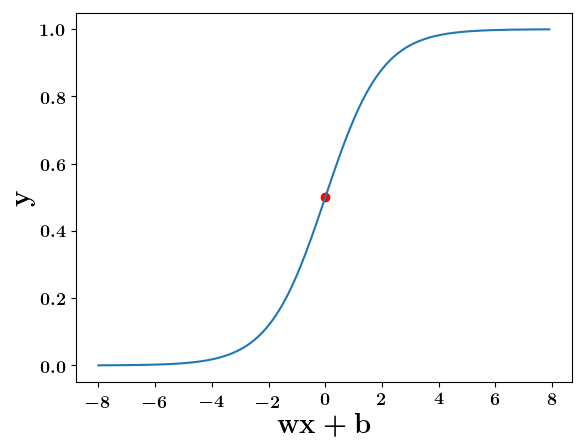
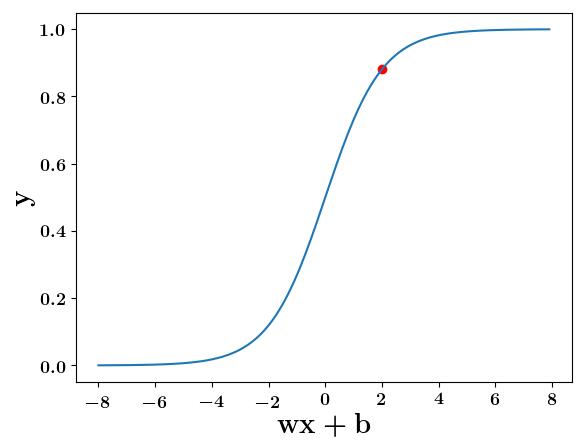
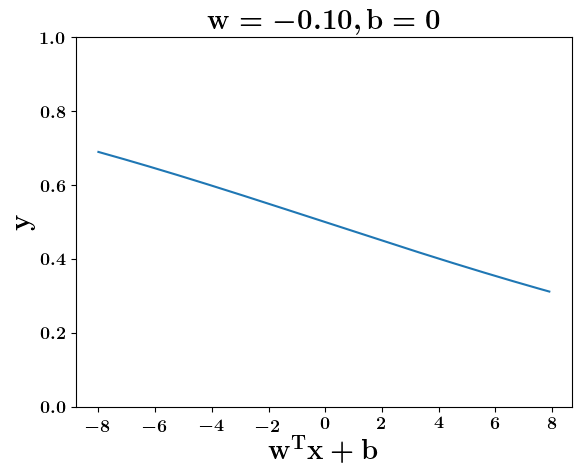
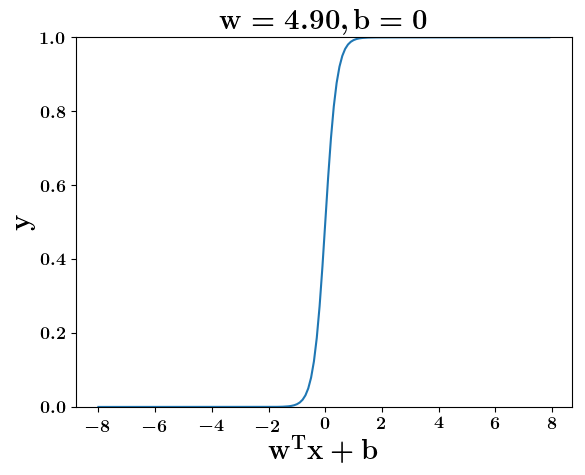
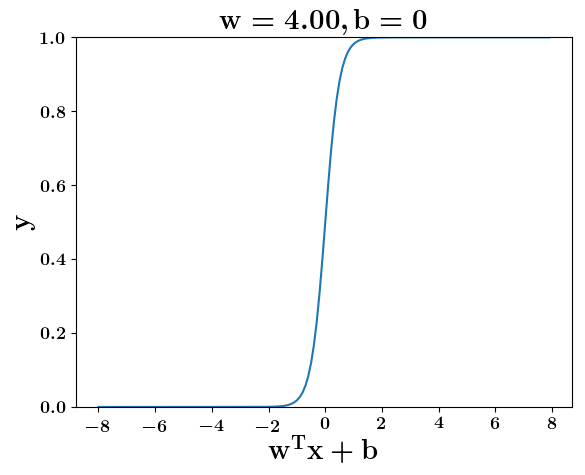
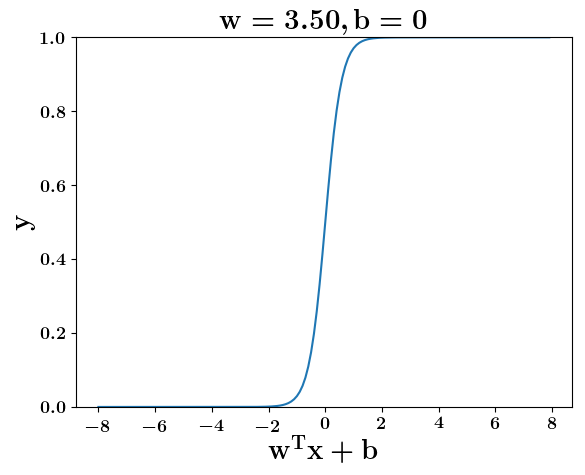
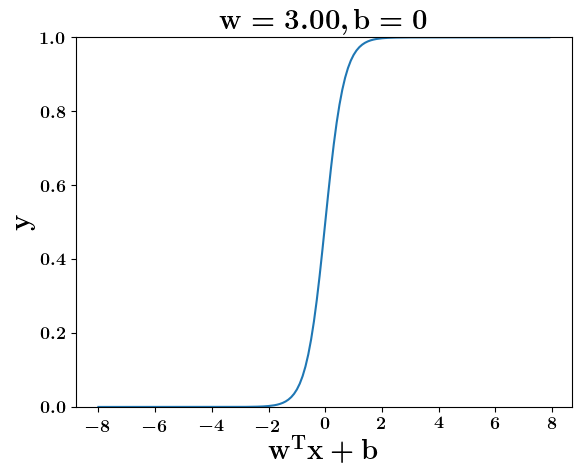
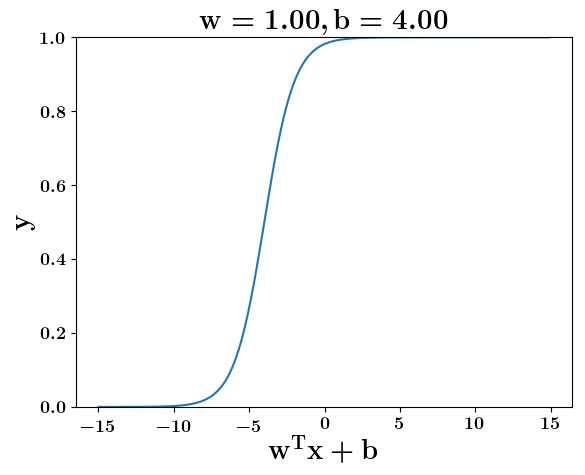
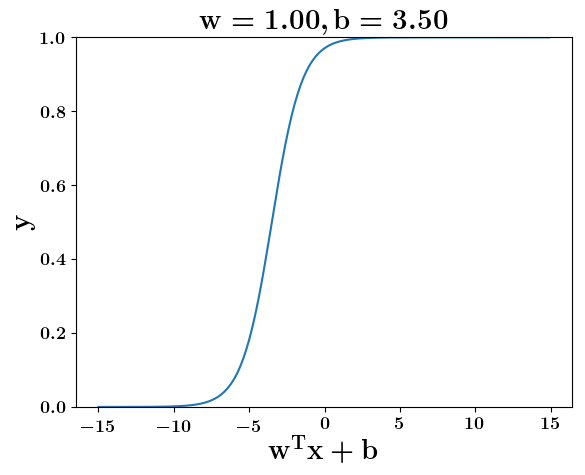
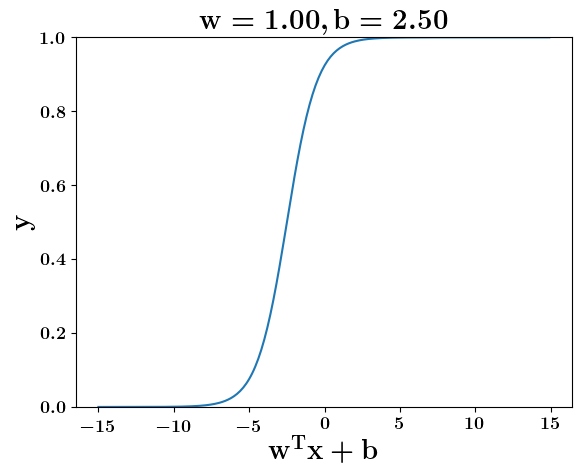
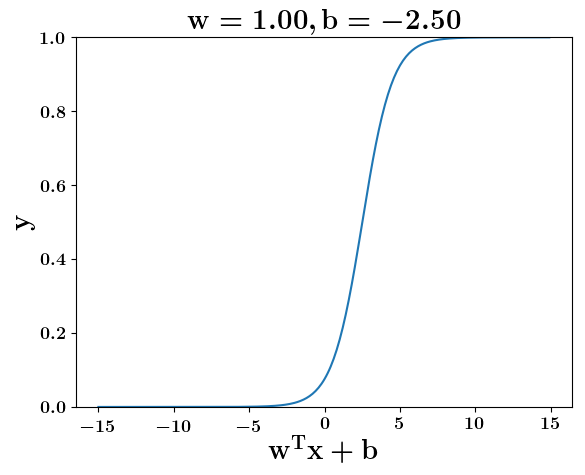
Model
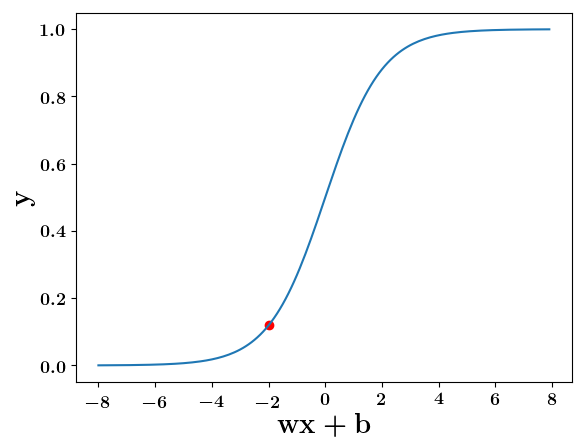
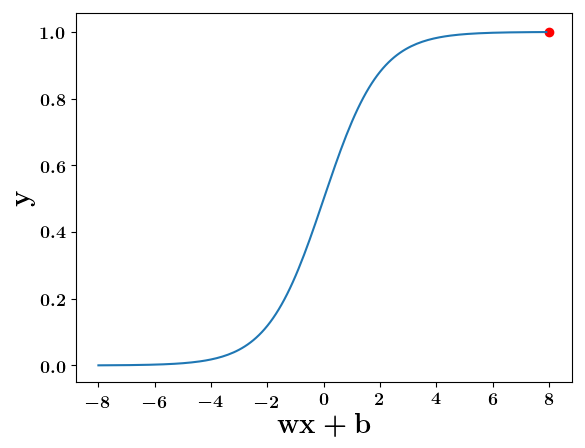
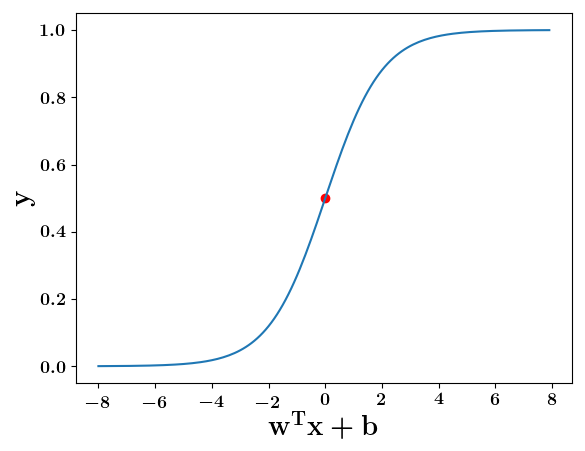
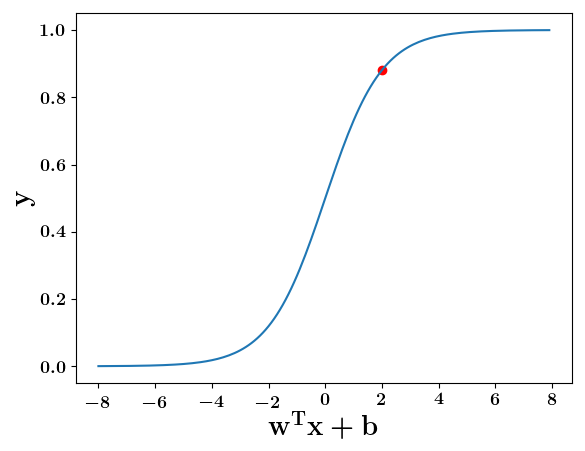
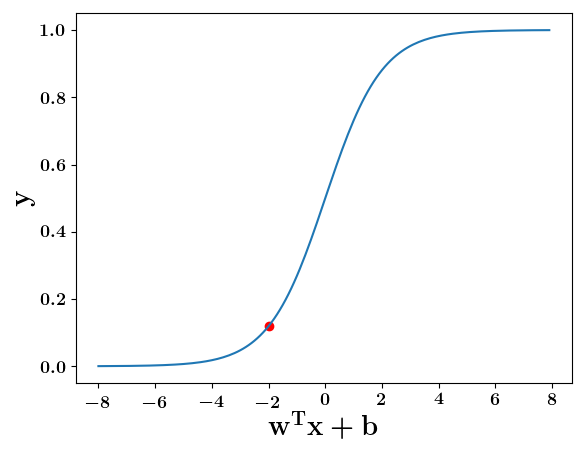
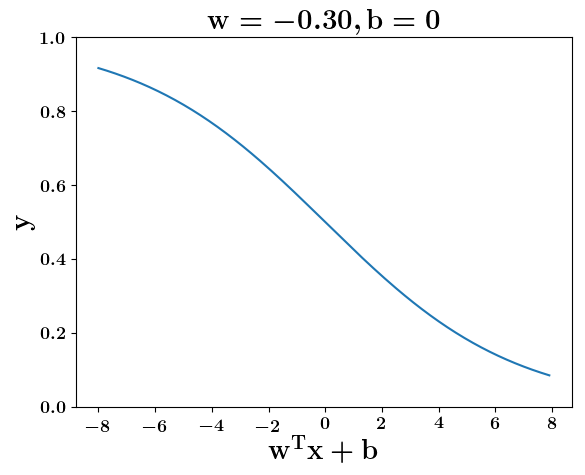
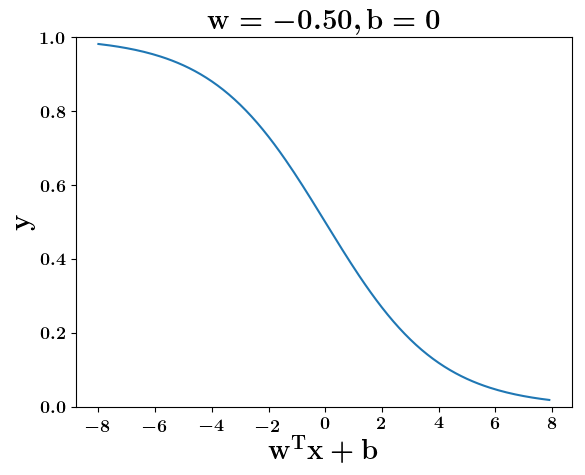
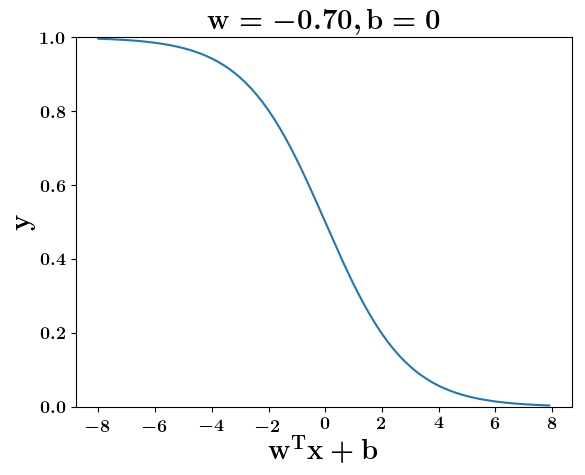
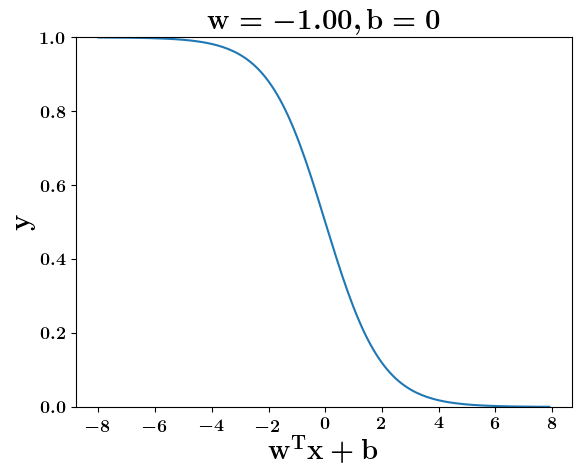
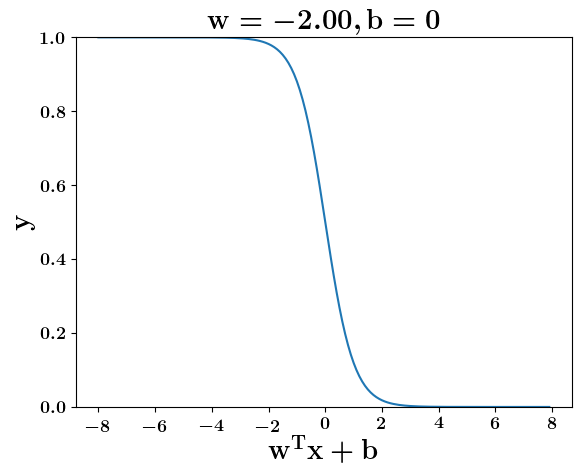
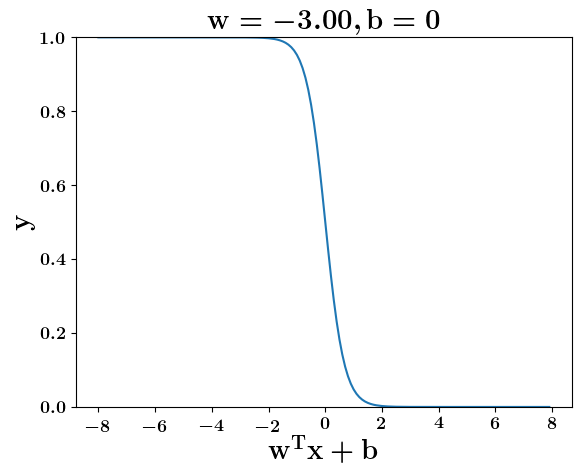
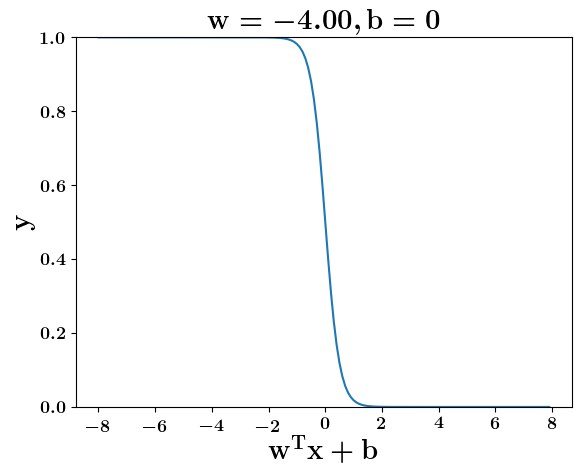
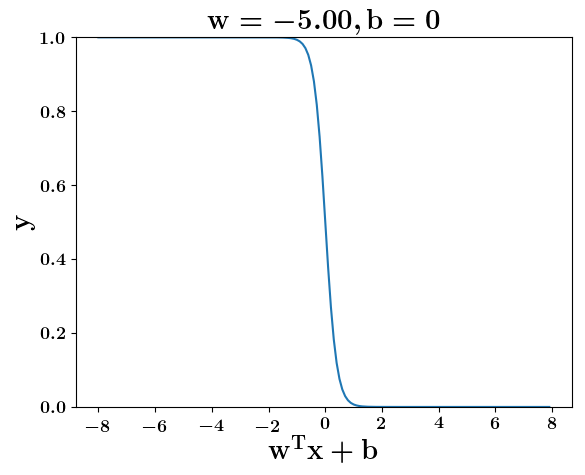
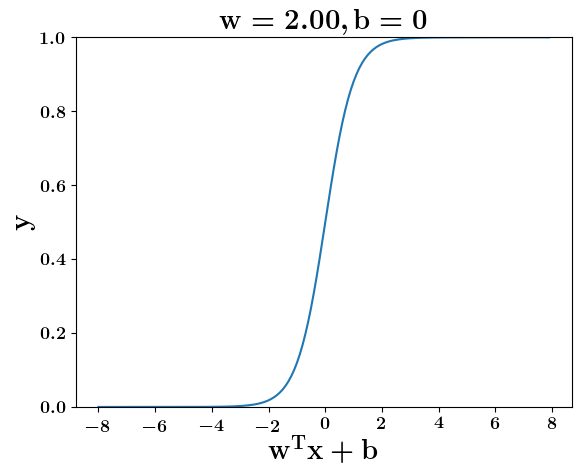
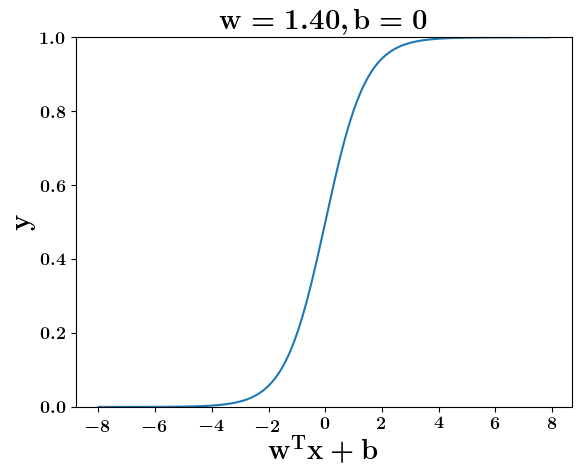
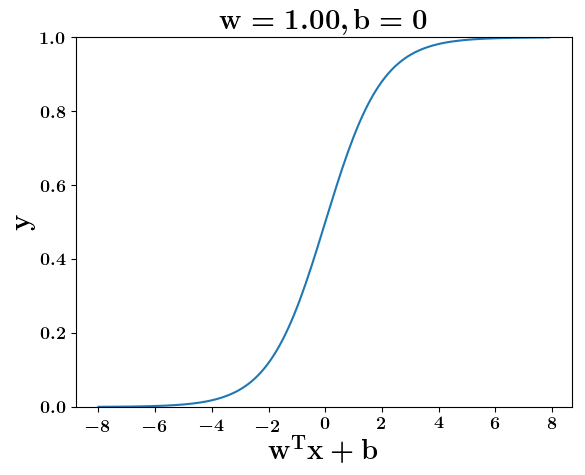
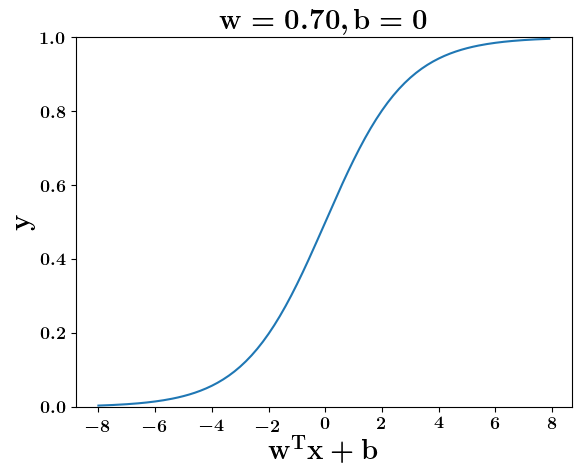
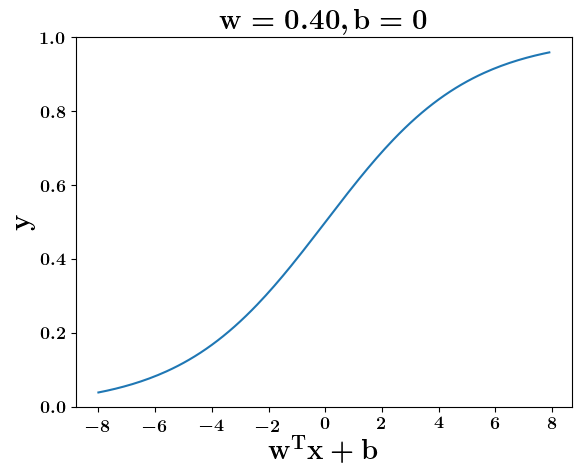
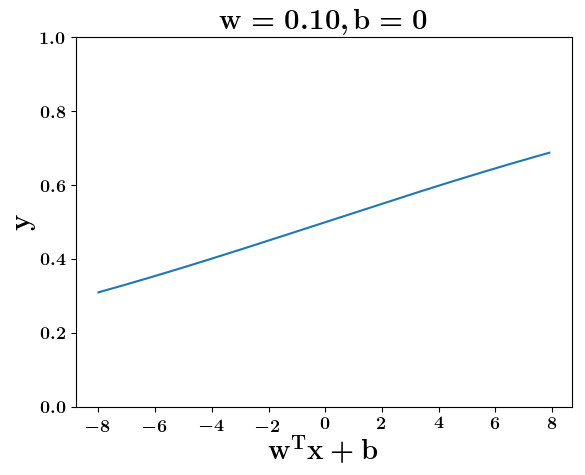
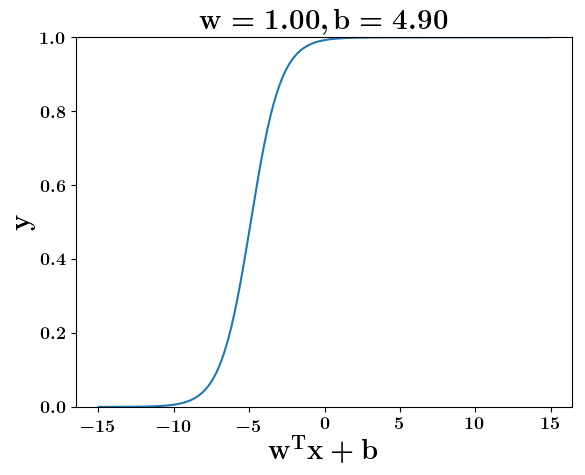
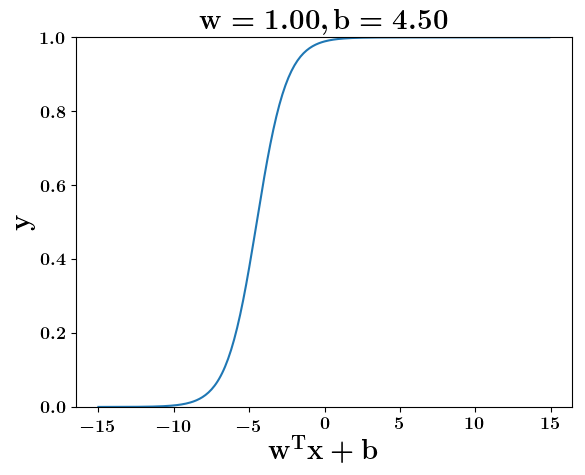
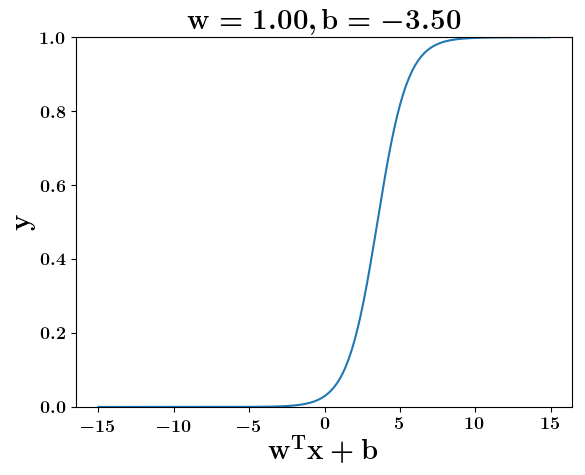
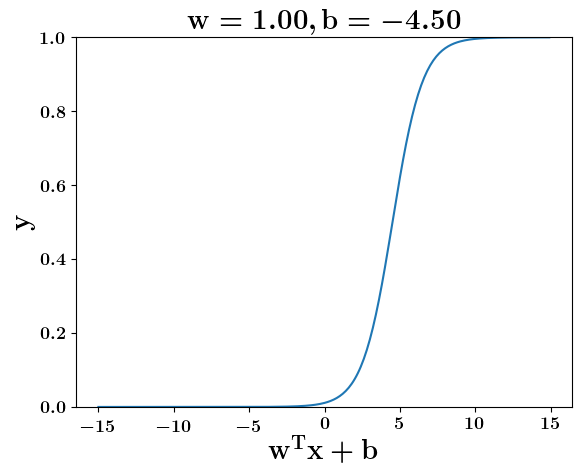
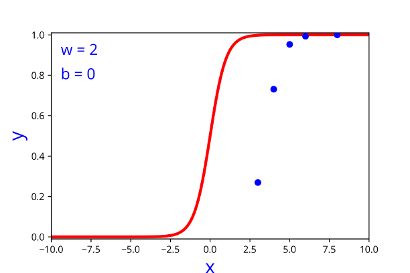
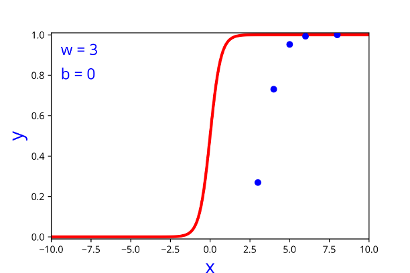
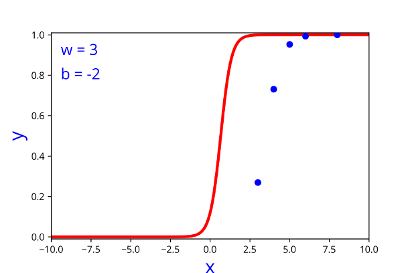
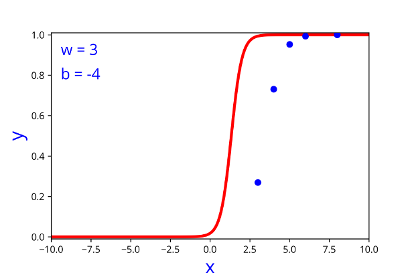
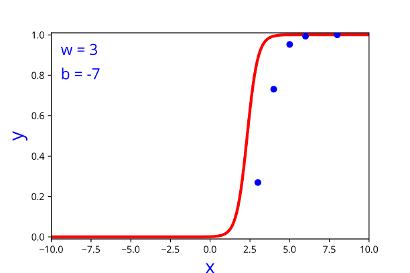
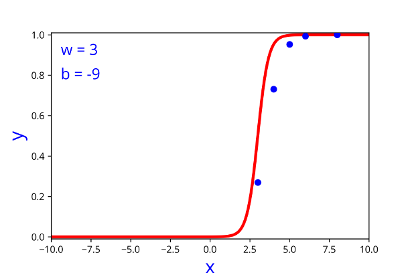
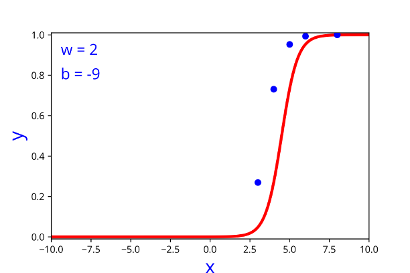
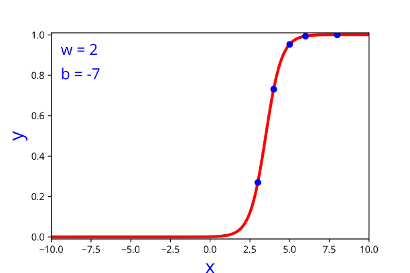
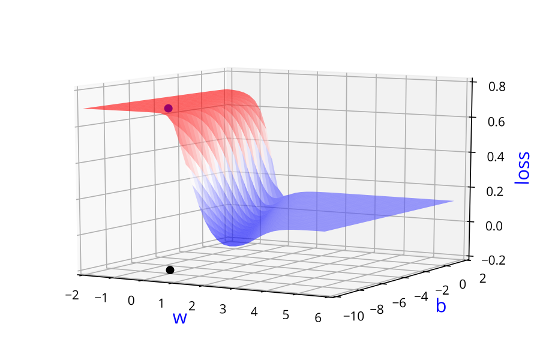
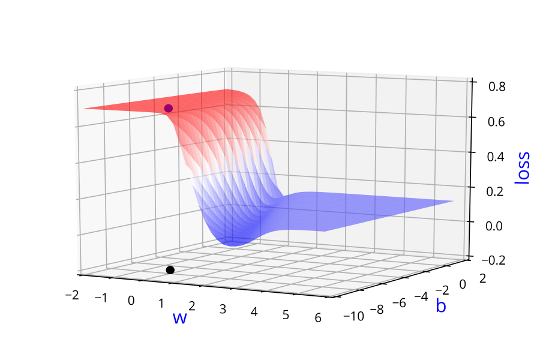
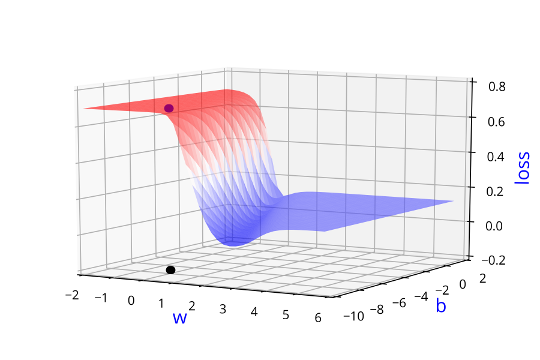
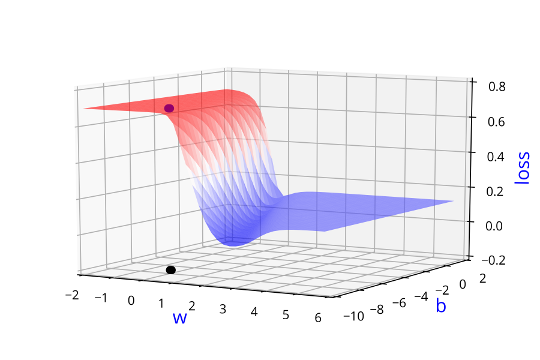
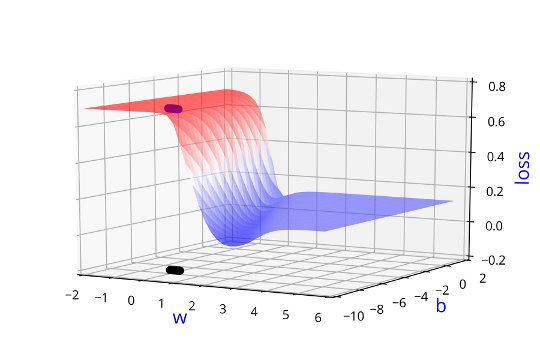
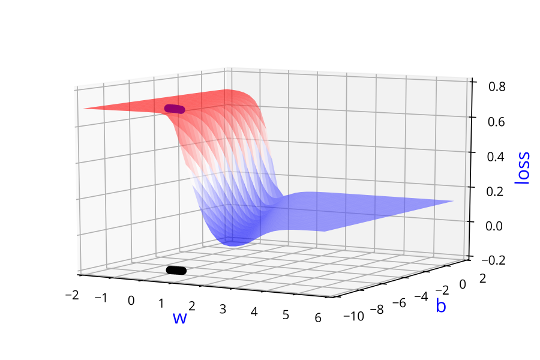
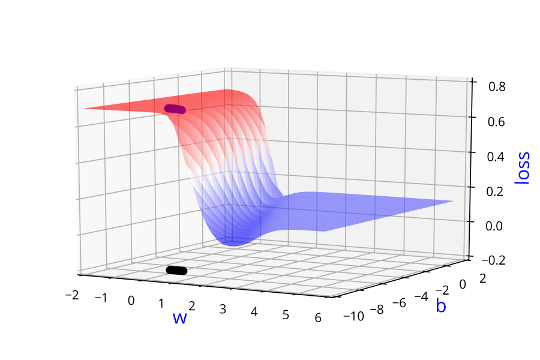
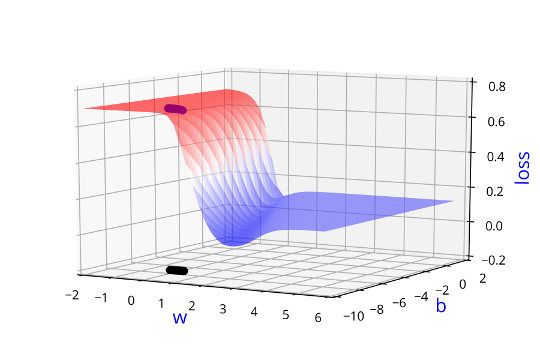
How does the function behave when we change w and b
(c) One Fourth Labs
At what value of x is the value of sigmoid(X) = 0.5


Loss Function
What is the loss function that you use for this model ?
(c) One Fourth Labs
Can we use loss functions which represent the solution to the problem better? For example, is a bi-quadratic loss a good choice? We will see this later in the course.
| 1 | 1 | 0.5 | 0.6 |
| 2 | 1 | 0.8 | 0.7 |
| 1 | 2 | 0.2 | 0.2 |
| 2 | 2 | 0.9 | 0.5 |
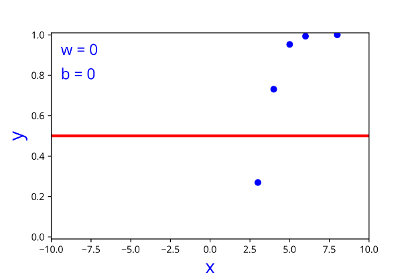
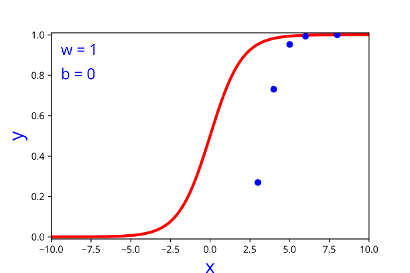
Learning Algorithm
Can we try to estimate w, b using some guess work ?
(c) One Fourth Labs
Initialise
Iterate over data:
till satisfied
\( h = \frac{1}{1+e^{-(w*x + b)}} \)
| I/P | O/P |
|---|---|
| 2 | 0.047 |
| 3 | 0.268 |
| 4 | 0.73 |
| 5 | 0.952 |
| 8 | 0.999 |
\(w, b \)
\( guess\_and\_update(x_i) \)
| w | b |
|---|---|

| w | b |
|---|---|
| 1 | 0 |
| w | b |
|---|---|
| 0 | 0 |
| w | b |
|---|---|
| 2 | 0 |
| w | b |
|---|---|
| 3 | -7 |
| w | b |
|---|---|
| 3 | -4 |
| w | b |
|---|---|
| 3 | -2 |
| w | b |
|---|---|
| 3 | 0 |
| w | b |
|---|---|
| 3 | -9 |
| w | b |
|---|---|
| 2 | -9 |
| w | b |
|---|---|
| 2 | -7 |
Learning Algorithm
Can we take a closer look at what we just did ?
(c) One Fourth Labs
Initialise
Iterate over data:
till satisfied
\(w, b \)
\( guess\_and\_update(x_i) \)
| w | b |
|---|---|
| w | b |
|---|---|
| 1 | 0 |
| w | b |
|---|---|
| 0 | 0 |
| w | b |
|---|---|
| 2 | 0 |
| w | b |
|---|---|
| 3 | -7 |
| w | b |
|---|---|
| 3 | -4 |
| w | b |
|---|---|
| 3 | -2 |
| w | b |
|---|---|
| 3 | 0 |
| w | b |
|---|---|
| 3 | -9 |
| w | b |
|---|---|
| 2 | -9 |
\( w = w + \Delta w \\ b = b + \Delta b \)
| w | b |
|---|---|
| 2 | -7 |
1 = 0 + \(\Delta\)1
0 = 0 + \( \Delta\)0
2 = 1 + \(\Delta\)1
0 = 0 + \( \Delta\)0
3 = 2 + \(\Delta\)1
0 = 0 + \( \Delta\)0
3 = 3 + \(\Delta\)0
-2 = 0 + \( \Delta\)-2
3 = 3 + \(\Delta\)0
-4 = -2 + \( \Delta\)-2
3 = 3 + \(\Delta\)0
-7 = -4 + \( \Delta\)-3
3 = 3 + \(\Delta\)0
-9 = -7 + \( \Delta\)-2
2 = 3 + \(\Delta\)-1
-9 = -7 + \( \Delta\)-2
2 = 3 + \(\Delta\)-1
-7 = -9 + \( \Delta\)2
w = 0
b = 0
\( w = w + \Delta w \)
\( b = b + \Delta b \)
\( \Delta w = some\_guess \)
\( \Delta b = some\_guess \)
Learning Algorithm
Can we connect this to the loss function ?
(c) One Fourth Labs
Initialise
Iterate over data:
till satisfied
\(w, b \)
\( guess\_and\_update(x_i) \)
\( w = w + \Delta w \\ b = b + \Delta b \)
1 = 0 + \(\Delta\)1
0 = 0 + \( \Delta\)0
2 = 1 + \(\Delta\)1
0 = 0 + \( \Delta\)0
3 = 2 + \(\Delta\)1
0 = 0 + \( \Delta\)0
3 = 3 + \(\Delta\)0
-2 = 0 + \( \Delta\)-2
3 = 3 + \(\Delta\)0
-4 = -2 + \( \Delta\)-2
3 = 3 + \(\Delta\)0
-7 = -4 + \( \Delta\)-3
3 = 3 + \(\Delta\)0
-9 = -7 + \( \Delta\)-2
2 = 3 + \(\Delta\)-1
-9 = -7 + \( \Delta\)-2
2 = 3 + \(\Delta\)-1
-7 = -9 + \( \Delta\)2
w = 0
b = 0
\( w = w + \Delta w \)
\( b = b + \Delta b \)
| w | b | Loss |
| w | b | Loss |
| 0 | 0 | 0.1609 |
| w | b | Loss |
| 1 | 0 | 0.1064 |
| w | b | Loss |
| 2 | 0 | 0.1210 |
| w | b | Loss |
| 3 | 0 | 0.1217 |
| w | b | Loss |
| 3 | -2 | 0.1215 |
| w | b | Loss |
| 3 | -4 | 0.1198 |
| w | b | Loss |
| 3 | -7 | 0.1081 |
| w | b | Loss |
| 3 | -9 | 0.0209 |
| w | b | Loss |
| 2 | -9 | 0.0636 |
| w | b | Loss |
| 2 | -7 | 0.000 |
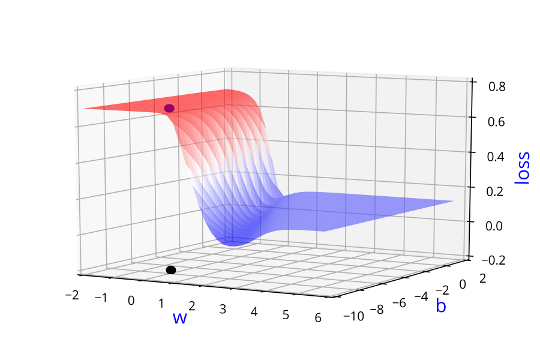
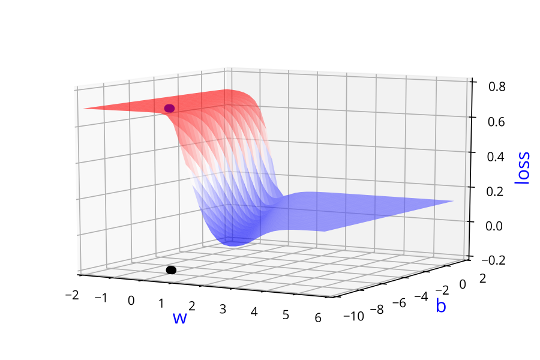
Indeed we were using the loss function to guide us in finding \( \Delta w\) and \(\Delta b\)
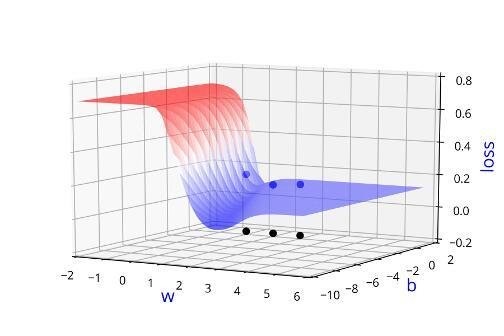
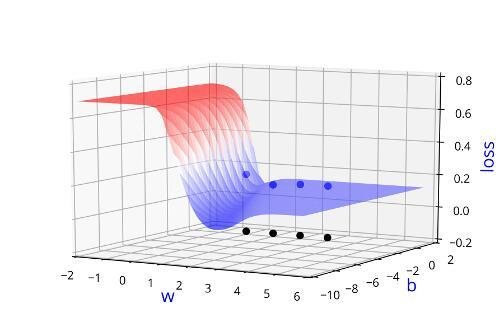
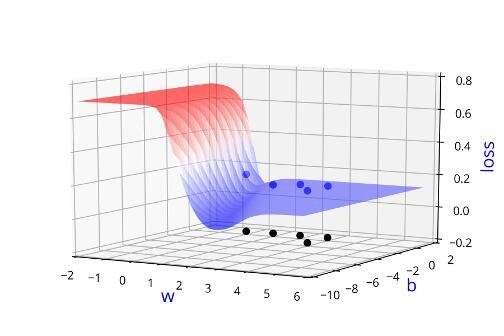
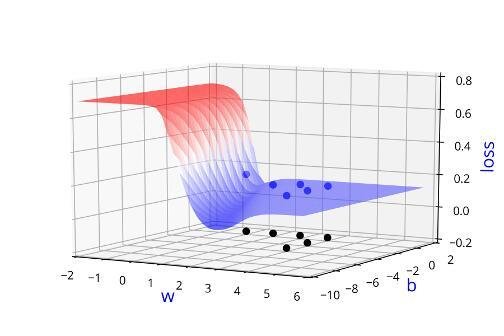
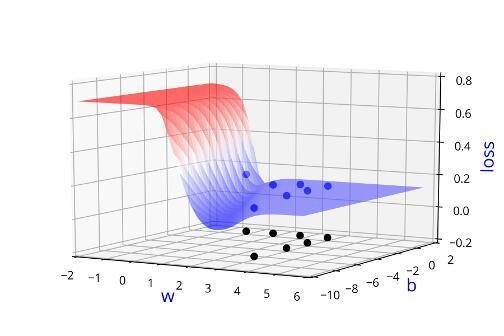
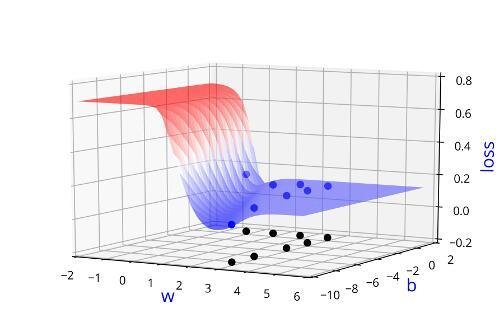
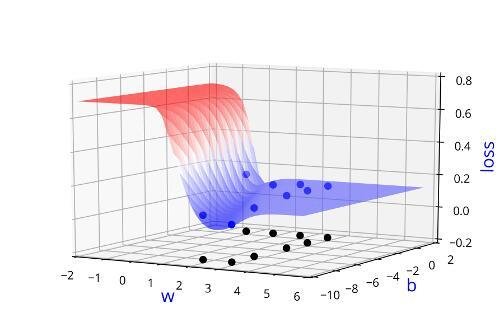
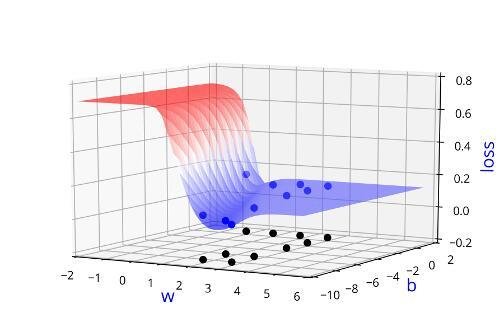
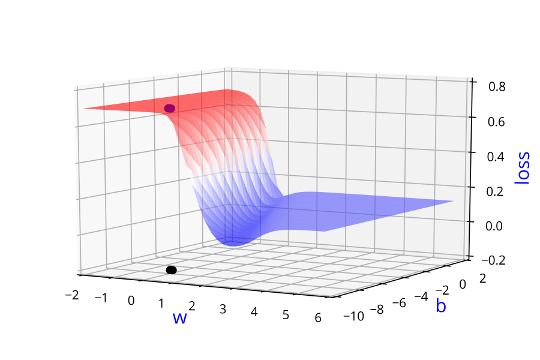
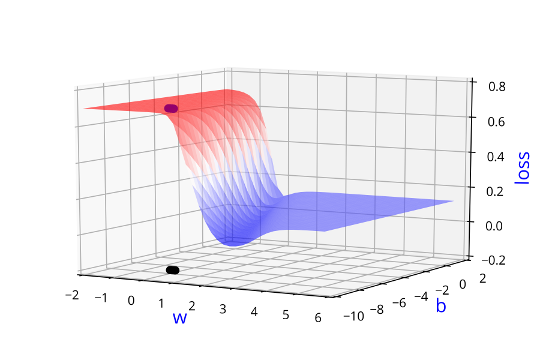
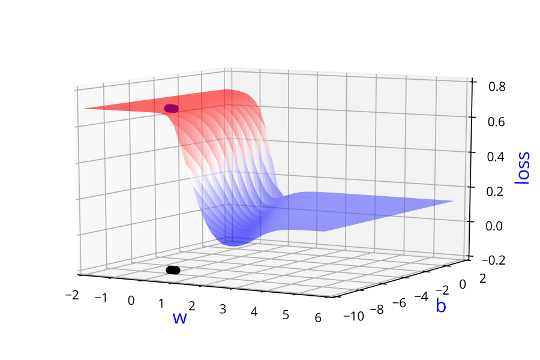
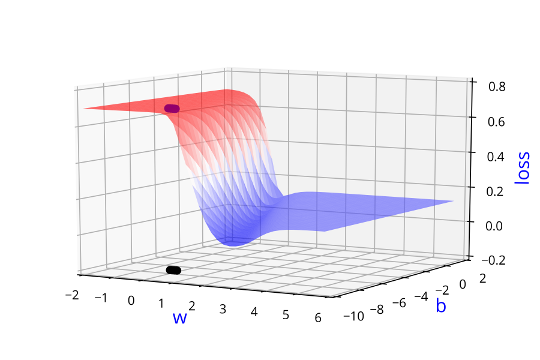
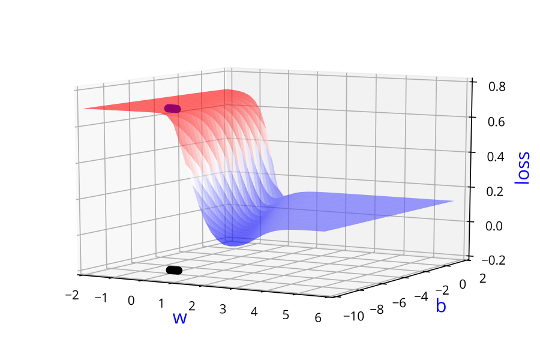
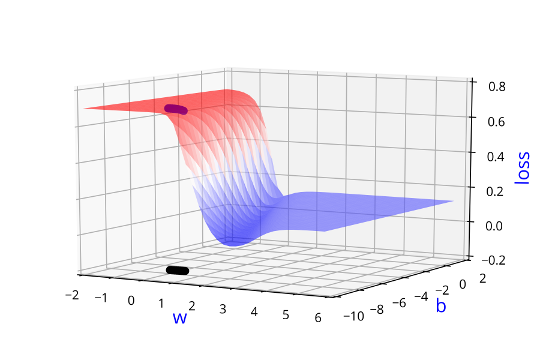
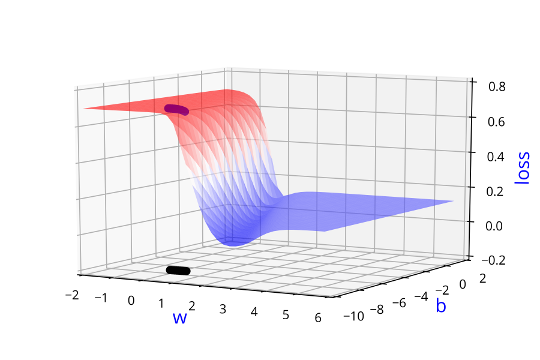
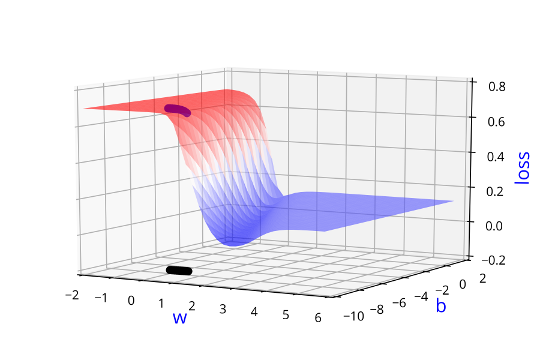
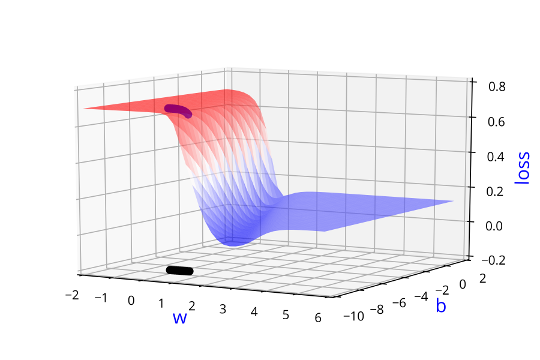
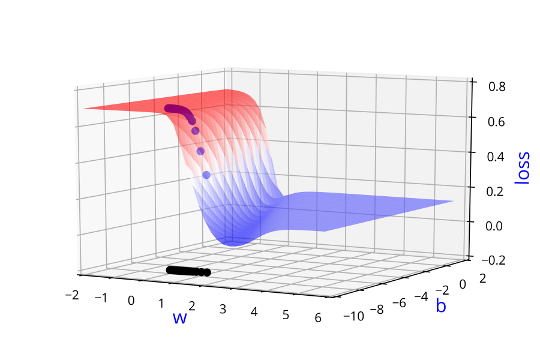
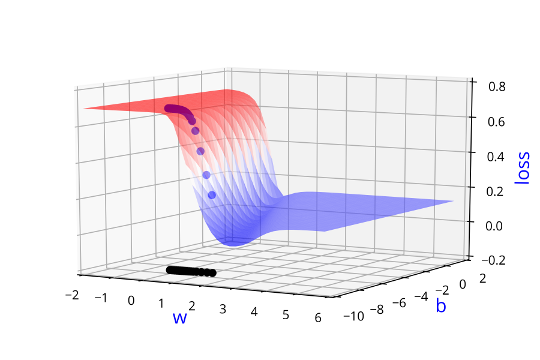
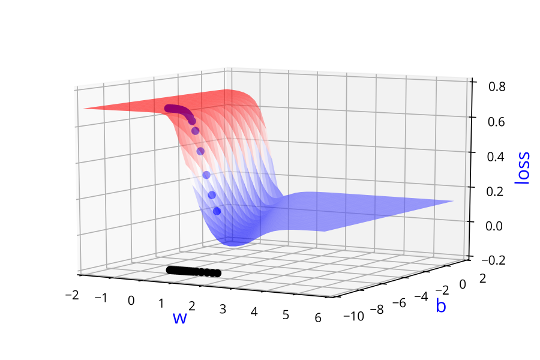
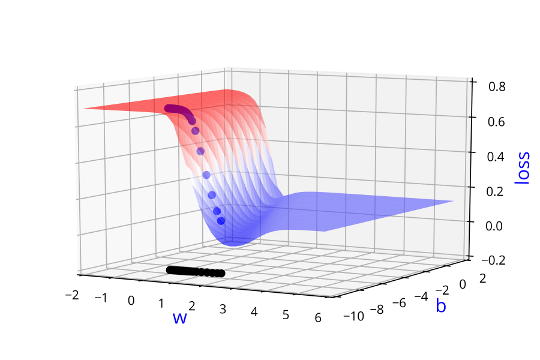
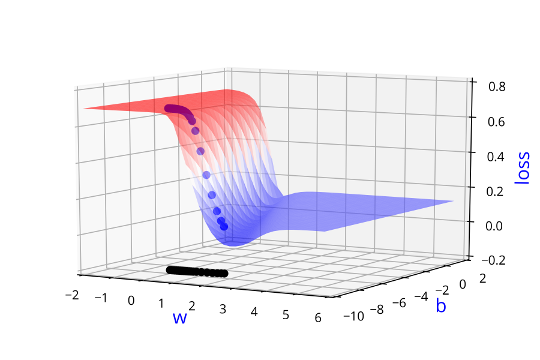
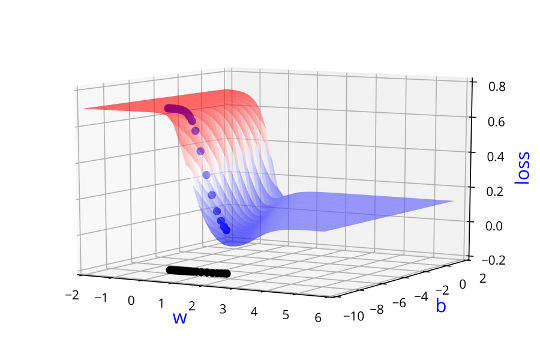
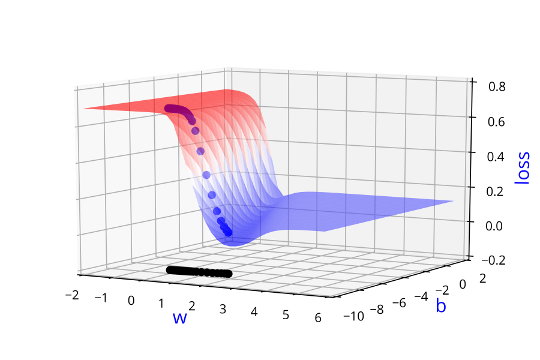
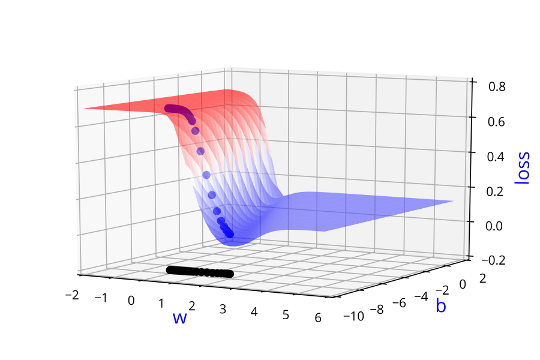
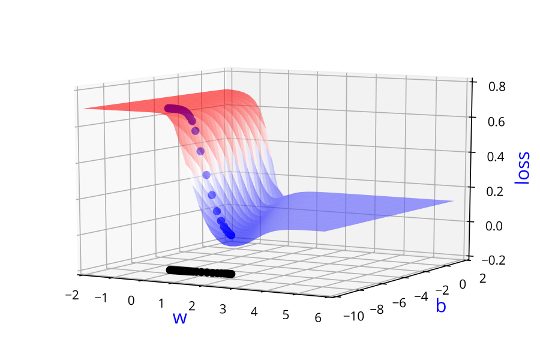
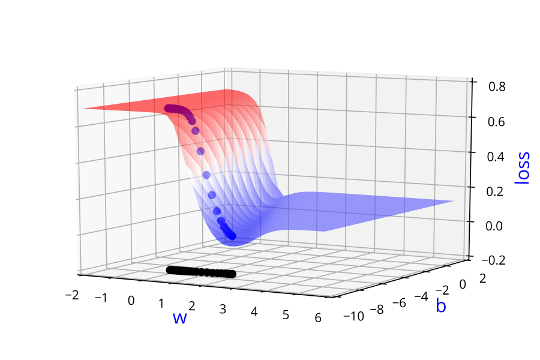
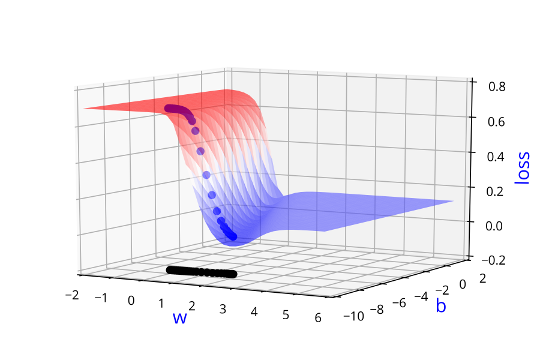
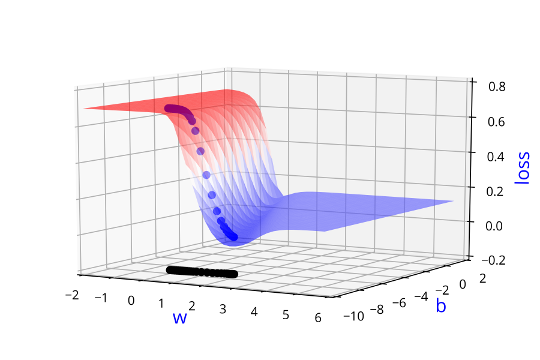
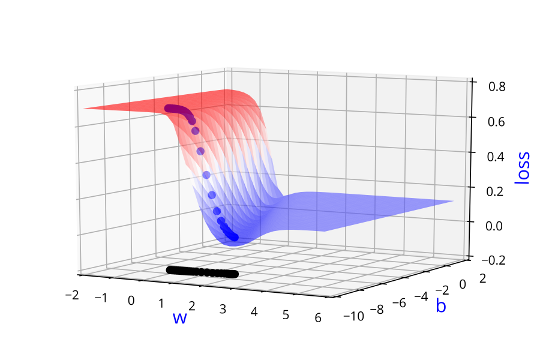
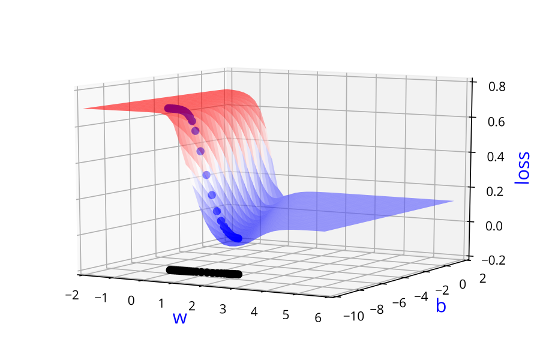
Learning Algorithm
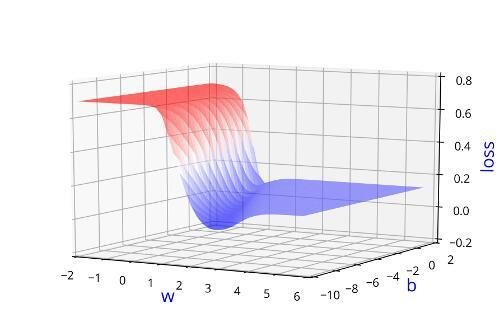
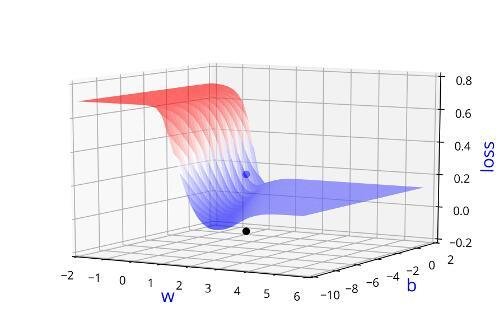
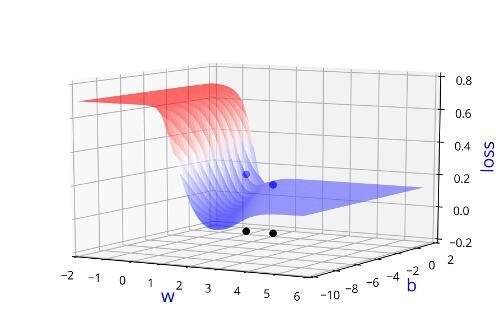
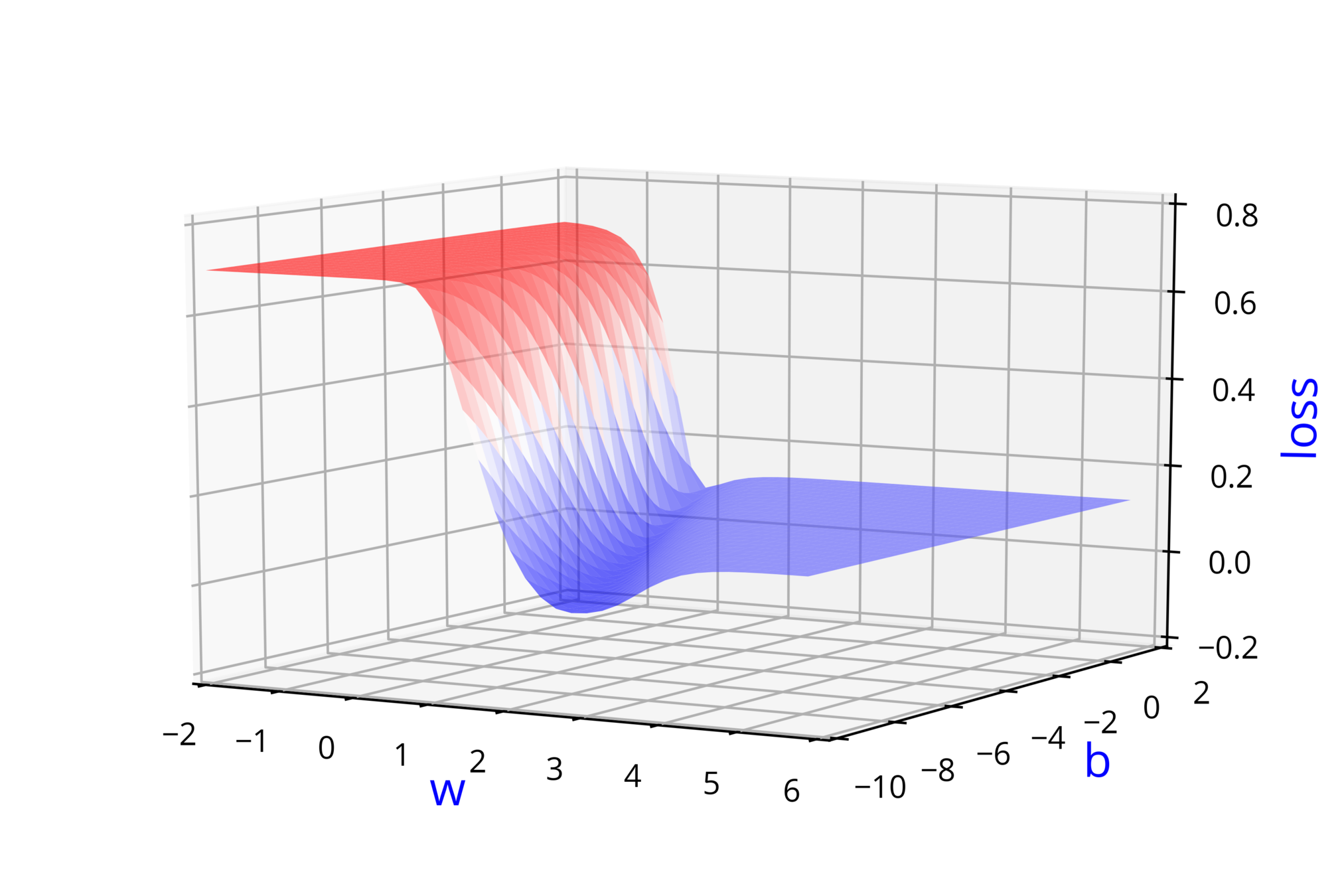
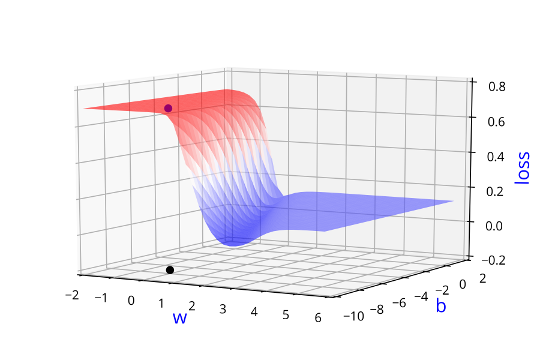
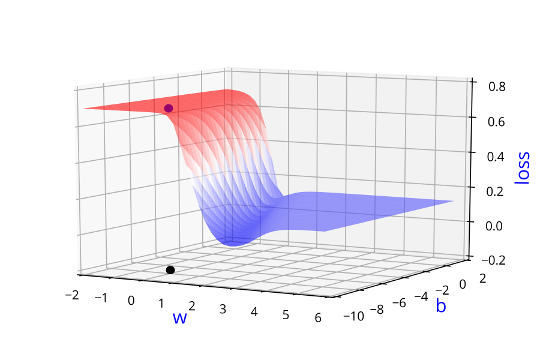
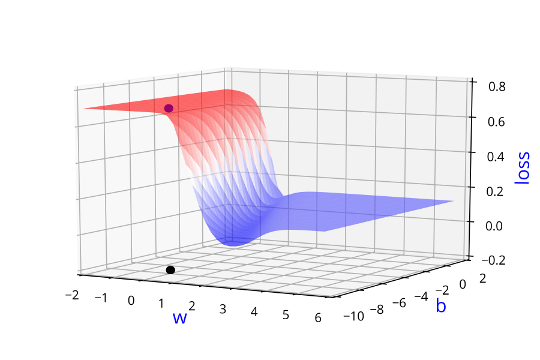
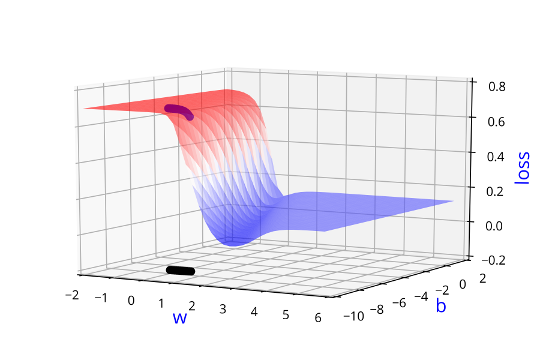
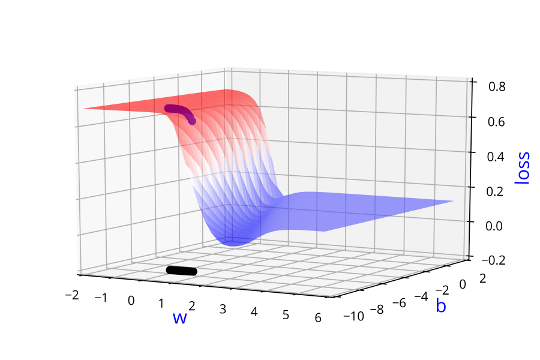
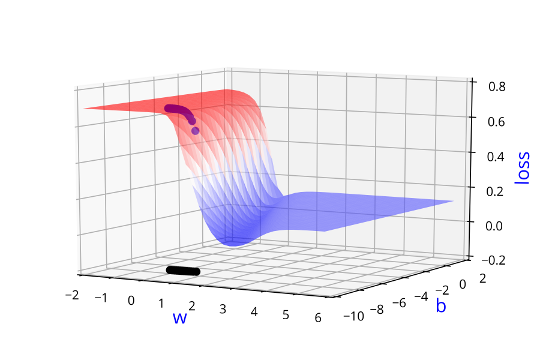
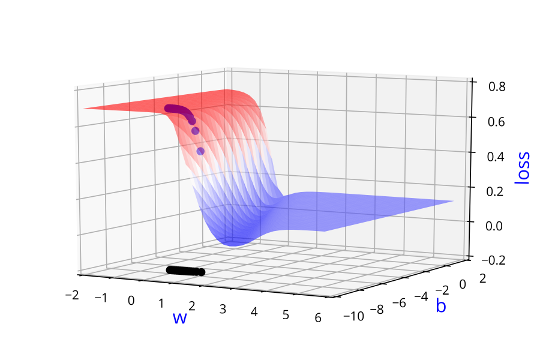
Can we visualise this better ?
(c) One Fourth Labs
Initialise
Iterate over data:
till satisfied
\(w, b \)
\( guess\_and\_update(x_i) \)
\( w = w + \Delta w \\ b = b + \Delta b \)
1 = 0 + \(\Delta\)1
0 = 0 + \( \Delta\)0
2 = 1 + \(\Delta\)1
0 = 0 + \( \Delta\)0
3 = 2 + \(\Delta\)1
0 = 0 + \( \Delta\)0
3 = 3 + \(\Delta\)0
-2 = 0 + \( \Delta\)-2
3 = 3 + \(\Delta\)0
-4 = -2 + \( \Delta\)-2
3 = 3 + \(\Delta\)0
-7 = -4 + \( \Delta\)-3
3 = 3 + \(\Delta\)0
-9 = -7 + \( \Delta\)-2
2 = 3 + \(\Delta\)-1
-9 = -7 + \( \Delta\)-2
2 = 3 + \(\Delta\)-1
-7 = -9 + \( \Delta\)2
w = 0
b = 0
\( w = w + \Delta w \)
\( b = b + \Delta b \)
Learning Algorithm
(c) One Fourth Labs
Initialise
Iterate over data:
till satisfied
\(w, b \)
\( guess\_and\_update(x_i) \)
| w | b |
|---|---|
| w | b |
|---|---|
| 1 | 0 |
| w | b |
|---|---|
| 0 | 0 |
| w | b |
|---|---|
| 2 | 0 |
| w | b |
|---|---|
| 3 | -7 |
| w | b |
|---|---|
| 3 | -4 |
| w | b |
|---|---|
| 3 | -2 |
| w | b |
|---|---|
| 3 | 0 |
| w | b |
|---|---|
| 3 | -9 |
| w | b |
|---|---|
| 2 | -9 |
\( w = w + \Delta w \\ b = b + \Delta b \)
| w | b |
|---|---|
| 2 | -7 |
1 = 0 + \(\Delta\)1
0 = 0 + \( \Delta\)0
2 = 1 + \(\Delta\)1
0 = 0 + \( \Delta\)0
3 = 2 + \(\Delta\)1
0 = 0 + \( \Delta\)0
3 = 3 + \(\Delta\)0
-2 = 0 + \( \Delta\)-2
3 = 3 + \(\Delta\)0
-4 = -2 + \( \Delta\)-2
3 = 3 + \(\Delta\)0
-7 = -4 + \( \Delta\)-3
3 = 3 + \(\Delta\)0
-9 = -7 + \( \Delta\)-2
2 = 3 + \(\Delta\)-1
-9 = -7 + \( \Delta\)-2
2 = 3 + \(\Delta\)-1
-7 = -9 + \( \Delta\)2
w = 0
b = 0
\( w = w + \Delta w \)
\( b = b + \Delta b \)
\( \Delta w = some\_guess \)
\( \Delta b = some\_guess \)
"Instead of guessing \( \Delta w\) and \(\Delta b\), we need a principled way of changing w and b based on the loss function"
What is our aim now ?
Learning Algorithm
Can we formulate this more mathematically ?
(c) One Fourth Labs
\(\theta = [w, b] \)
\(\Delta \theta = [\Delta w, \Delta b] \)
\( \theta_{new} = \theta + \eta . \Delta \theta \)
\(\theta\)
\(\Delta \theta\)
\( \eta . \Delta \theta \)
\( \theta_{new}\)
Instead of guessing \(\Delta w\) and\( \Delta\) b, we need a principled way of changing w and b based on the loss function
Learning Algorithm
Can we get the answer from some basic mathematics ?
(c) One Fourth Labs
\( \because \theta = [w, b] \)
\(w \rightarrow w + \eta \Delta w \)
\(b \rightarrow b + \eta \Delta b \)
\(\mathscr{L} (w) < \mathscr{L}(w +\eta \Delta w)\)
\( \mathscr{L} (b) < \mathscr{L}(b +\eta \Delta b)\)
\(\mathscr{L} ( \theta) < \mathscr{L}( \theta + \eta \Delta \theta)\)
\( f(x + \Delta x) = f(x) + f'(x)\Delta x + \frac{1}{2!}f''(x)\Delta x^2 + \frac{1}{3!}f'''(x)\Delta x^3 + \cdots \)
Taylor Series
\(\mathscr{L} (w,b) < \mathscr{L}(w +\eta \Delta w, b + \eta\Delta b )\)
\( \mathscr{L}(\theta + \Delta \theta) = \mathscr{L}(\theta) + \mathscr{L}'(\theta)\Delta \theta + \frac{1}{2!}\mathscr{L}''(\theta)\Delta \theta^2 + \frac{1}{3!}\mathscr{L}'''(\theta)\Delta \theta^3 + \cdots \)
Learning Algorithm
How does Taylor series help us to arrive at the answer ?
(c) One Fourth Labs
\(\mathscr{L}(\theta+\eta u) = \mathscr{L}(\theta) + \eta*u^T \nabla_{\theta} \mathscr{L}(\theta) + \frac{\eta^2}{2!}*u^T \nabla^2 \mathscr{L} (\theta)u + \frac{\eta^3}{3!}*....+ \frac{\eta^4}{4!}*...\)
\(= \mathscr{L}(\theta)+ \eta*u^T \nabla_{\theta}\mathscr{L}(\theta) [\eta is typically small, so \eta^2, \eta^3, ... \rightarrow 0]\)
Note that the move \( \eta u \) would be favorable only if,
\( \mathscr{L}(\theta+\eta u) - \mathscr{L}(\theta) < 0\) [ i.e. if the new loss is less than the previous loss]
This implies,
\( u^T \nabla_{\theta} \mathscr{L}(\theta) < 0 \)
For ease of notation,
let \( \Delta\theta = u\),
Then from Taylor series, we have,
Learning Algorithm
How does Taylor series help us to arrive at the answer ?
(c) One Fourth Labs
Okay, so we have,
\( u^T \nabla_{\theta} \mathscr{L}(\theta) < 0 \)
But, what is the range of \(u^T \nabla_{\theta}\mathscr{L}(\theta) \) ?
Let \(\beta\) be the angle between \(u\) and \(\nabla_{\theta}\mathscr{L}(\theta)\), then we know that,
\(-1 \leq cos(\beta) = \frac{u^T \nabla_{\theta}\mathscr{L}(\theta)}{||u||*||\nabla_{\theta}\mathscr{L}(\theta)||} \leq 1\)
multiply throughout by k = \( ||u||*||\nabla_{\theta}\mathscr{L}(\theta)||\)
\( -k \leq k*cos(\beta) = u^T \nabla_{\theta}\mathscr{L}(\theta) \leq k \)
Thus, \( \mathscr{L}(\theta + \eta u) - \mathscr{L}(\theta) = u^T \nabla_{\theta}\mathscr{L}(\theta) = k*\cos \beta \) will be most negative
when \(\cos(\beta)\) = -1 i.e., when \(\beta\) is 180\(\degree \)
Learning Algorithm
How does Taylor series help us to arrive at the answer ?
(c) One Fourth Labs
Gradient Descent Rule,
- The direction \(u\) that we intend to move in should be at \(180\degree\) w.r.t. the gradient.
- In other words, move in a direction opposite to the gradient.
Parameter Update Rule
\(w_{t+1} = w_{t} - \eta \Delta w_{t} \)
\(b_{t+1} = b_{t} - \eta \Delta b_{t} \)
\( where \Delta w_{t} =\frac{\partial \mathscr{L}(w, b)}{\partial w}_{at w = w_t, b= b_t}, \Delta b_{t} = \frac{\partial \mathscr{L}(w,b)}{\partial b}_{at w = w_t, b = b_t}\)
So we now have a more principled way of moving in the w-b plane than our "guesswork'' algorithm
Learning Algorithm
How does the algorithm look like now ?
(c) One Fourth Labs
Initialise
\(w, b \)
Iterate over data:
\(w_{t+1} = w_{t} - \eta \Delta w_{t} \)
till satisfied
How do I compute \( \Delta w\) and\( \Delta b \)?
\(b_{t+1} = b_{t} - \eta \Delta b_{t} \)
Learning Algorithm
How do I compute \(\Delta w \) and \(\Delta b\)
(c) One Fourth Labs
\(\mathscr{L} = \frac{1}{5} \sum_{i = 1}^{i=5}(f(x_i) - y_i)\)
\(\frac{\partial \mathscr{L}}{\partial w} = \frac{\partial}{\partial w}[ \frac{1}{5} \sum_{i = 1}^{i=5}(f(x_i) - y_i)]\)
\(\Delta w = \frac{\partial \mathscr{L}}{\partial w} = \frac{1}{5} \sum_{i = 1}^{i=5}\frac{\partial}{\partial w} (f(x_i) - y_i)\)
Let's consider only one term in this sum,
Learning Algorithm
How do I compute \(\Delta w \) and \(\Delta b\)
(c) One Fourth Labs
\(\nabla w = \frac{\partial}{\partial w}[\frac{1}{2}*(f(x) - y)^2] \)
\(= \frac{1}{2}*[2*(f(x) - y) * \frac{\partial}{\partial w} (f(x) - y)]\)
\(= (f(x) - y) * \frac{\partial}{\partial w}(f(x)) \)
\(= (f(x) - y) * \frac{\partial}{\partial w}\Big(\frac{1}{1 + e^{-(wx + b)}}\Big) \)
\( = \color{red}{(f(x) - y) * f(x)*(1- f(x)) *x}\)
\( \frac{\partial}{\partial w}\Big(\frac{1}{1 + e^{-(wx + b)}}\Big)\)
\( =\frac{-1}{(1 + e^{-(wx + b)})^2}\frac{\partial}{\partial w}(e^{-(wx + b)})) \)
\( =\frac{-1}{(1 + e^{-(wx + b)})^2}*(e^{-(wx + b)})\frac{\partial}{\partial w}(-(wx + b)))\)
\( =\frac{-1}{(1 + e^{-(wx + b)})}*\frac{e^{-(wx + b)}}{(1 + e^{-(wx + b)})} *(-x)\)
\( =\frac{1}{(1 + e^{-(wx + b)})}*\frac{e^{-(wx + b)}}{(1 + e^{-(wx + b)})} *(x)\)
\( =f(x)*(1- f(x))*x \)
Learning Algorithm
How do I compute \(\Delta w \) and \(\Delta b\)
(c) One Fourth Labs
\(\mathscr{L} = \frac{1}{5} \sum_{i = 1}^{i=5}(f(x_i) - y_i)\)
\(\frac{\partial \mathscr{L}}{\partial w} = \frac{\partial}{\partial w}[ \frac{1}{5} \sum_{i = 1}^{i=5}(f(x_i) - y_i)]\)
\(\Delta w = \frac{\partial \mathscr{L}}{\partial w} = \frac{1}{5} \sum_{i = 1}^{i=5}\frac{\partial}{\partial w} (f(x_i) - y_i)\)
Let's consider only one term in this sum,
\(\Delta w=(f(x) - y) * f(x)*(1- f(x)) *x \)
For 5 points,
\(\Delta w=\sum_{i=1}^{i=5} (f(x_i) - y_i) *f(x_i))*(1- f(x_i)) *x_i \)
\(\Delta b=\sum_{i=1}^{i=5} (f(x_i) - y_i) * f(x_i))*(1- f(x_i)) \)
Learning Algorithm
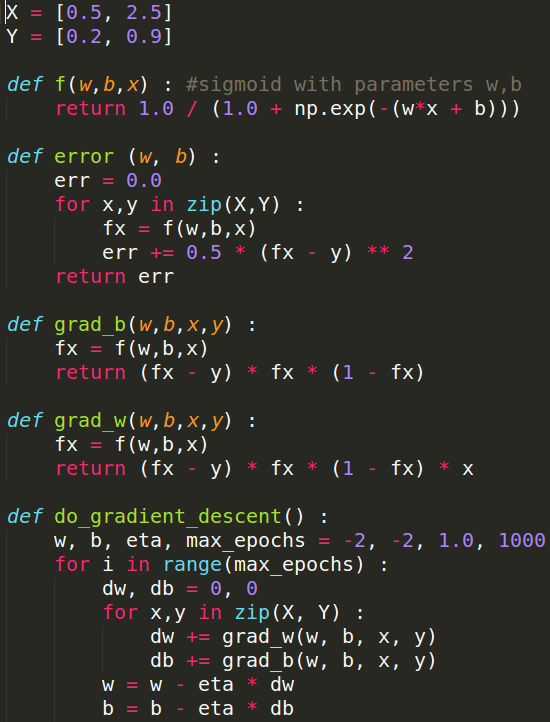
How does the full algorithm look like ?
(c) One Fourth Labs
Learning Algorithm
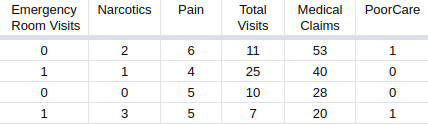
What happens when we have more than 2 parameters ?
(c) One Fourth Labs
\( z = w_1*ER\_visits + w_2*Narcotics + w_3*Pain + w_4*TotalVisits + w_5*MedicalClaims + b \)
\(\hat{y} = \frac{1}{1+e^{-(w_1*x_1 + w_2*x_2 + w_3*x_3 + w_4*x_4 + w_5*x_5 +b)}}\)
\( z = w_1*x_1 + w_2*x_2 + w_3*x_3 + w_4*x_4 + w_5*x_5 + b \)
Initialise
\(w_1, w_2,...,w_5, b \)
Iterate over data:
\(w_1^{t+1} = w_1^{t} - \eta \Delta w_1^{t} \)
till satisfied
\(b_{t+1} = b_{t} - \eta \Delta b_{t} \)
\(w_2^{t+1} = w_2^{t} - \eta \Delta w_2^{t} \)
\(w_5^{t+1} = w_5^{t} - \eta \Delta w_5^{t} \)
\( \vdots \)
\(\Delta w=(f(x) - y) * f(x)*(1- f(x)) *x \)
\(\Delta w_1=(f(x_1,x_2,x_3,x_4,x_5) - y) * f(x_1,x_2,x_3,x_4,x_5)*(1- f(x_1,x_2,x_3,x_4,x_5)) *x_1 \)
\(\hat{y} = \frac{1}{1+e^{-z}}\)
\(\Delta w_1 =(\hat{y} - y) * \hat{y}*(1- \hat{y}) *x_1 \)
Learning Algorithm
How do I compute \(\Delta w \) and \(\Delta b\)
(c) One Fourth Labs
\(\nabla w_1 = \frac{\partial}{\partial w_1}[\frac{1}{2}*(\hat{y} - y)^2] \)
\(= \frac{1}{2}*[2*(\hat{y} - y) * \frac{\partial}{\partial w_1} (\hat{y} - y)]\)
\(= (\hat{y} - y) * \frac{\partial}{\partial w_1}(\hat{y}) \)
\(= (\hat{y} - y) * \frac{\partial}{\partial w_1}\Big(\frac{1}{1 + e^{-(w_1x_1 + w_2x_2 + w_3x_3 + w_4x_4 + w_5x_5 + b)}}\Big) \)
\( = \color{red}{(\hat{y} - y) *\hat{y}*(1- \hat{y}) *x_1}\)
\( \frac{\partial}{\partial w_1}\Big(\frac{1}{1 + e^{-(z)}}\Big)\)
\( =\frac{-1}{(1 + e^{-(z)})^2}\frac{\partial}{\partial w_1}(e^{-(z)})) \)
\( =\frac{-1}{(1 + e^{-(z)})^2}*(e^{-(z)})\frac{\partial}{\partial w_1}(-(z)))\)
\( =\frac{-1}{(1 + e^{-(z)})}*\frac{e^{-(z)}}{(1 + e^{-(z)})} *(-x_1)\)
\( =\frac{1}{(1 + e^{-(z)})}*\frac{e^{-(z)}}{(1 + e^{-(z)})} *(x_1)\)
\( =\hat{y}*(1- \hat{y})*x_1 \)
\( z = w_1*x_1 + w_2*x_2 + w_3*x_3 + w_4*x_4 + w_5*x_5 + b \)
\( \frac{\partial}{\partial w_1}(-z) = - \frac{\partial }{\partial w_1} (w_1*x_1 + w_2*x_2 + w_3*x_3 + w_4*x_4 + w_5*x_5 + b) \)
\( \frac{\partial}{\partial w_1}(-z) = - x_1 \)
Learning Algorithm
How do I compute \(\Delta w \) and \(\Delta b\)
(c) One Fourth Labs
\(\mathscr{L} = \frac{1}{2}(\hat{y} - y)^{2}\)
\(\frac{\partial \mathscr{L}}{\partial w_1} = \frac{\partial}{\partial w_1}(\frac{1}{2} [\hat{y} - y]^2)\)
\(\vdots\)
\(\frac{\partial \mathscr{L}}{\partial w_5} = \frac{\partial}{\partial w_5}(\frac{1}{2} [\hat{y} - y]^2)\)
\(\frac{\partial \mathscr{L}}{\partial w_2} = \frac{\partial}{\partial w_2}(\frac{1}{2} [\hat{y} - y]^2)\)
\(\Delta w_1 =(\hat{y} - y) * \hat{y}*(1- \hat{y}) *x_1 \)
\(\Delta w_2 =(\hat{y} - y) * \hat{y}*(1- \hat{y}) *x_2 \)
\(\Delta w_5 =(\hat{y} - y) * \hat{y}*(1- \hat{y}) *x_5 \)
\(\vdots\)
Learning Algorithm
How do I compute \(\Delta w \) and \(\Delta b\)
(c) One Fourth Labs
\(\begin{bmatrix} \Delta w_1 \\ \Delta w_2 \\ \vdots \\ \Delta w_5 \end{bmatrix} \)
\( \begin{bmatrix} (\hat{y}-y)*\hat{y}*(1-\hat{y})*x_1\\ (\hat{y}-y)*\hat{y}*(1-\hat{y})*x_2 \\ \vdots \\ (\hat{y}-y)*\hat{y}*(1-\hat{y})*x_5\end{bmatrix}\)
\( \Delta w \)
=
=
\( (\hat{y}-y)*\hat{y}*(1-\hat{y}) \begin{bmatrix} x_1 \\ x_2 \\ \vdots \\ x_5 \end{bmatrix} \)
=
Learning Algorithm
How does the full algorithm look like ?
(c) One Fourth Labs

How do you check the performance of the sigmoid model?
(c) One Fourth Labs
Evaluation
| Launch (within 6 months) | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | 1 | 0 |
| Weight (<160g) | 1 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 1 |
| Screen size (<5.9 in) | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 |
| dual sim | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 |
| Internal memory (>= 64 GB, 4GB RAM) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 |
| NFC | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 1 | 0 |
| Radio | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| Battery(>3500mAh) | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0 |
| Price > 20k | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 1 | 0 |
| Like? (y) | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 0 |
| predicted | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 |
| 1 | 0 | 0 | 1 |
| 0 | 1 | 1 | 1 |
| 0 | 1 | 1 | 1 |
| 0 | 1 | 0 | 0 |
| 1 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 |
| 1 | 1 | 1 | 0 |
| 1 | 1 | 1 | 0 |
| 0 | 0 | 1 | 0 |
| 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 0 |
Training data
Test data
Take-aways
What are the new things that we learned in this module ?
(c) One Fourth Labs
Show the 6 jars at the top (again can be small)
\( \{0, 1\} \)
\( \in \mathbb{R} \)
Tasks with Real inputs and real outputs
show the sigmoid plot with the issue of non-linearly separable data
show squared error loss
show gradient descent update rule
show accuracy formula
Take-aways
What are the new things that we learned in this module ?
(c) One Fourth Labs
A slide where we compare sigmoid, perceptron and MP neuron in terms of 6 jars
Still not complex enough to handle non-linear data