Robotyka Open-Source
LeRobot, SO-100 oraz Jetson Orin Nano
Wprowadzenie i możliwości
Plan prezentacji
1. Platforma LeRobot
Framework, algorytmy uczenia, społeczność
2. Hardware SO-100
Specyfikacje, budowa, komponenty
3. Jetson Orin Nano
Obliczenia AI, edge computing
4. Demonstracja Live
Teleoperacja w czasie rzeczywistym
LeRobot Framework
Framework open-source oparty na PyTorch dla uczenia robotów end-to-end
- Licencja Apache 2.0
- Modularna architektura
- Integracja z Hugging Face Hub
- Standardowy format danych (dane tabelaryczne, wizualne, metadata)
- Agnostyczny sprzętowo, wsparcie dla rożnych modeli robotów, możliwość wykorzystania i implementacji wsparcia dla własnych konstrukcji
- Zestaw otwartoźródłowych zbiorów danych
- Społeczność praktyków rozwijających cały ekosystem
Uczenie przez Imitację (Behavioral cloning)
Koncepcja
Uczenie przez Imitację (Behavioral cloning)
Wyzwania
Kumulacja błędów
Małe błędy narastają wykładniczo:
Krok 100 → skumulowany błąd z każdego poprzedniego kroku
Multimodalność
Wiele poprawnych rozwiązań, a
uśrednianie prowadzi do błędów.
Algorytmy w LeRobot
| Algorytm | Zastosowanie | Ilość przykładów | Inferencja |
|---|---|---|---|
| ACT | Dwuręczne, kontaktowe | 50 | 10-15ms |
| Diffusion | Multimodalne, wysokie DOF | 50-100 | 50-200ms |
| VLA | Wielozadaniowe, język | 10-50 (fine-tuning) | 100-200ms |
ACT - Szybki
Diffusion - Multimodalny
VLA - Językowy, do wielu zadań
ACT — Action Chunking
Kluczowa zmiana w przypadku podejścia ACT polega na przewidywaniu 100 akcji naraz, zamiast przewidywania pojedynczych kroków. 500 kroków / 100 = 5 decyzji, co przekłada się na mniejsze ryzyko kumulacji błędów.
Architektura
ResNet18 (wizja) → Transformer (sekwencje) → CVAE (różnorodność)
ACT — Action Chunking
Autorzy przetestowali algorytm na 8 zadaniach jakotwieranie kubka, wkładanie baterii do pilota, czy przesuwanie klocków. Osiągając do ponad 90% sukcesów wykonania zadań przez wytrenowanego robota (dla wkładania baterii do pilota).
Efekty
| Metryka | Wartość |
|---|---|
| Sukces | 50-90% (zależnie od zadania) |
| Demonstracje | 50 |
| Uczenie | 3-12h |
| Inferencja | 10-15ms |
ACT — Action Chunking
lerobot-train \
--dataset.repo_id=${HF_USER}/your_dataset \
--policy.type=act \
--output_dir=outputs/train/act_runDiffusion Policy
W przypadku diffusion policy, stosowany jest podejście z iteracynym odszumianiem (diffusion) losowego szumu do momentu otrzymania prawidłowych akcji dla robota. Dzięki losowej inicjalizacji, podejście to eksploruje różne rozwiązania, co pomaga wspierać multimodalność. Jest też stosunkowo odporna na zakłocenia i zapewnia płynne trajektorie ruchu robota.
Diffusion Policy
Efekty
| Metryka | Wartość |
|---|---|
| Sukces | 50-95% (zależnie od zadania) |
| Demo | 50-150 |
| Uczenie | 12h |
| Inferencja | 50-200ms |
Chi, C., Xu, Z., Feng, S., Cousineau, E., Du, Y., Burchfiel, B., Tedrake, R., & Song, S. (2024). Diffusion Policy: Visuomotor Policy Learning via Action Diffusion. arXiv. 10.48550/arXiv.2303.04137
Diffusion Policy
python -m lerobot.scripts.train \
--output_dir=outputs/train/diffusion_pusht \
--policy.type=diffusion \
--dataset.repo_id=lerobot/pusht \
--seed=100000 \
--env.type=pusht \
--batch_size=64 \
--steps=200000 \
--eval_freq=25000 \
--save_freq=25000Vision-Language-Action
SmolVLA
SmolVLA to jeden z modeli z gatunku Vision-Language-Model, przygotowany przez HuggingFace, służacy jako "foundational" model o 450M parametrów, wytrenowany na bazie otwartego zbioru danych zawierającego nagrania robotów wykonujących rózne akcje. Łączy vision i text encodery i na tej podstawie dokonuje inferencji akcji, które ma wykonać robot. Wymaga ok. 10-50 przykładowych nagrań do fine-tuningu.
Shukor, M., Aubakirova, D., Capuano, F., Kooijmans, P., Palma, S., Zouitine, A., Aractingi, M., Pascal, C., Russi, M., Marafioti, A., Alibert, S., Cord, M., Wolf, T., & Cadene, R. (2025). SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics. arXiv. 10.48550/arXiv.2506.01844
Vision-Language-Action
SmolVLA

Shukor, M., Aubakirova, D., Capuano, F., Kooijmans, P., Palma, S., Zouitine, A., Aractingi, M., Pascal, C., Russi, M., Marafioti, A., Alibert, S., Cord, M., Wolf, T., & Cadene, R. (2025). SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics. arXiv. 10.48550/arXiv.2506.01844
Vision-Language-Action
SmolVLA
lerobot-train \
--policy.path=lerobot/smolvla_base \
--dataset.repo_id=${HF_USER}/my_dataset \
--batch_size=64 \
--steps=20000LeRobot - zestawy danych
LeRobot to również zbiory otwartoźródłowych danych, aktualnie jest dostępne ponad 100 zestawów, mających ponad 30 tys. pojedycznych epizodów, dla zadań takich jak podnoszenie i przemieszczanie, układanie (jeden na drugim), sortowanie przedmiotów, czy koordynacja między dwoma ramionami.
from lerobot.common.datasets
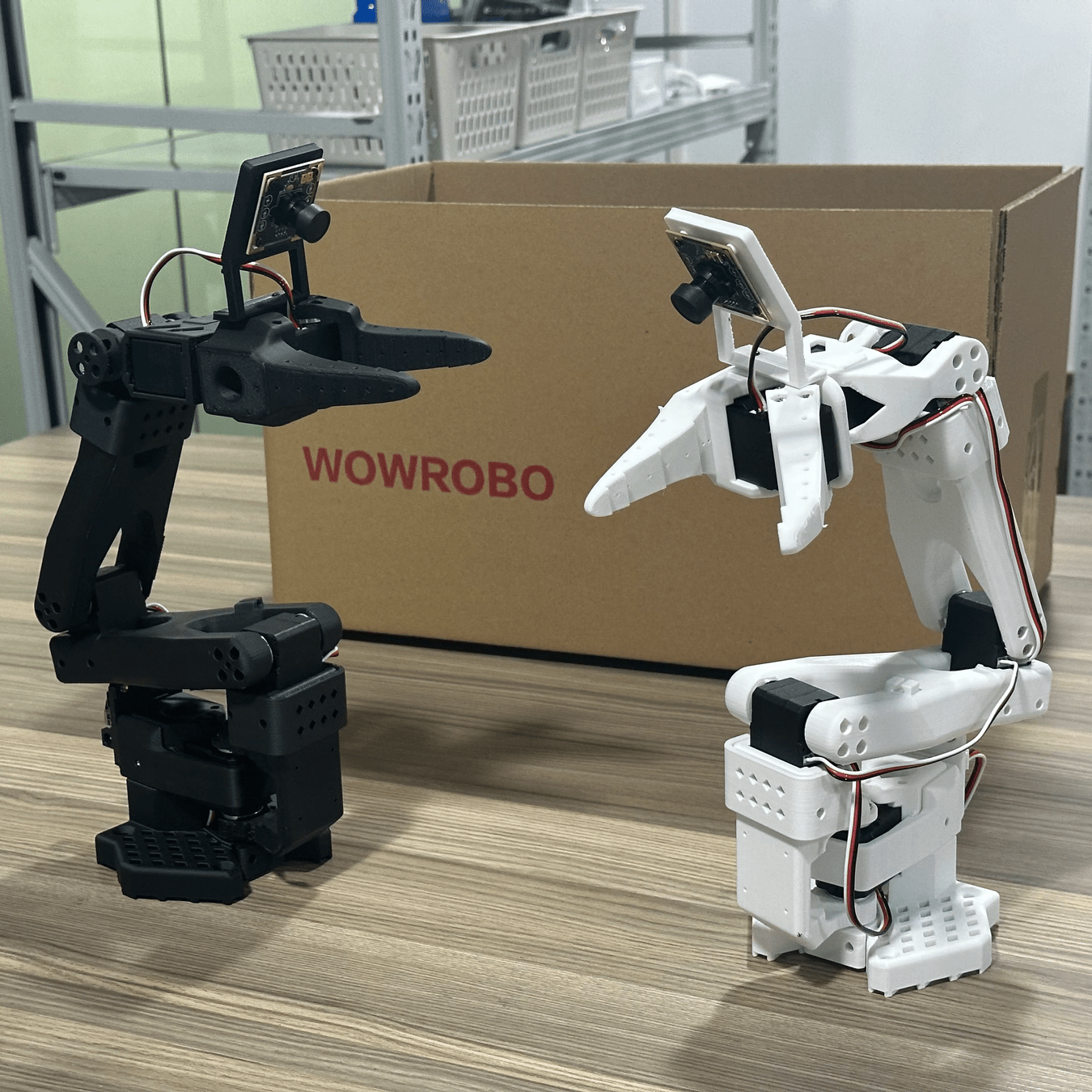
import LeRobotDataset dataset = LeRobotDataset("lerobot/pusht")Ramię Robotyczne SO-100/101
W pełni open-source (pliki CAD, BOM, kod) ramię robotyczne, drukowane 3D, zaprojektowane by ułatwić eksperymenty związane z wykorzystaniem metod uczenia maszynowego do kontroli robotów. Jedną z dużych zalet jest łatwość złożenia oraz stosunkowo niski koszt (<1000 PLN) w porównaniu do innych podobnych rozwiązań jak np ALOHA. Ramię to ma 6 stopni swobody (5+1), zasięg ramienia to ok 40-50 cm, rozdzielczość serw to 0.088°, udzwig to około 100-200g. Zestaw to dwa ramiona, leader oraz follower.
Komponenty
- 6× serwomechanizmy STS3215
- ~20 części drukowanych 3D
- Śruby M2, M3 (metryczne)
- Adapter MotorBus (USB→TTL)
- Zasilacz 7.4V/12V, 3-5A
- Kamery do rejestracji ruchu robota
Ulepszenia SO-101
Mieszane Przełożenia
Leader: łatwiejszy do poruszania
Follower: większy moment obrotowy
Prostszy Montaż
Prekonfigurowane silniki
Lepsze Okablowanie
Routing zewnętrzny
Zwiększona niezawodność
Przekłada się to na mniejszą siłę potrzebną do teleoperacji i większą niezawodność działania robota
NVIDIA Jetson Orin Nano
| Komponent | Spec |
|---|---|
| GPU | 1024 CUDA cores, Ampere, 32 Tensor Cores |
| CPU | 6-core ARM Cortex-A78, |
| Pamięć | 8GB LPDDR5, 102 GB/s |
| Moc obliczeniowa |
67 TOPS AI / 17 FP16 TFLOPS |
| Cena | ~1200 PLN |
Komputer jednopłytkowy wyprodukowany przez NVidia, dedykowany zastosowaniom brzegowym, wyposażony w akcelerator w formie GPU.
Zasoby
Dokumentacja
huggingface.co/docs/lerobot
GitHub
github.com/huggingface/lerobot
Społeczność
discord.com/invite/s3KuuzsPFb
Hardware
github.com/TheRobotStudio/SO-ARM100