Teoría del control: conceptos básicos
Rafael Martínez Martínez
Definiciones
- Señal
- Sistema

Abstracción con diagramas de bloques
Definiciones
- Proceso o planta
- Control en lazo abierto
- Control en lazo cerrado



Ejemplo.
Ejemplo.
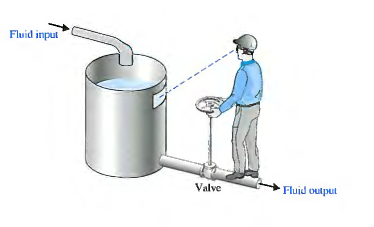
En determinado sistema de control de un proceso químico, es importante "controlar" la composición química del producto. Para hacer esto, la medición de la composición puede ser realizada con un analizador de flujo infrarrojo. La válvula puede ser controlada. Complete el diagrama de retroalimentación en lazo cerrado.

Ahora unas cuentas
Para leer
El controlador PD decrementa el sobrepaso máximo (Mp), el tiempo de
levantamiento(tr), y el tiempo de asentamiento o establecimiento (ts).
El controlador PI puede mejorar la respuesta transitoria mejorando el amortiguamiento y reduciendo el sobrepaso máximo con la parte y reducir el error de estado estable con la parte integral.
P, D, I. Aumenta la estabilidad con la parte derivativa, y proporcional, la rapidez de respuesta con la parte derivativa y da más exactitud con la parte integral.