
Aula 09
Fundamentos da Mecânica
Prof. Ronai Lisbôa
UFRN - ECT - BCT
Objetivos
Estudar os seguintes sistemas dinâmicos:
Movimento circular.
Movimento circular é um movimento curvilíneo cuja trajetória é um círculo.
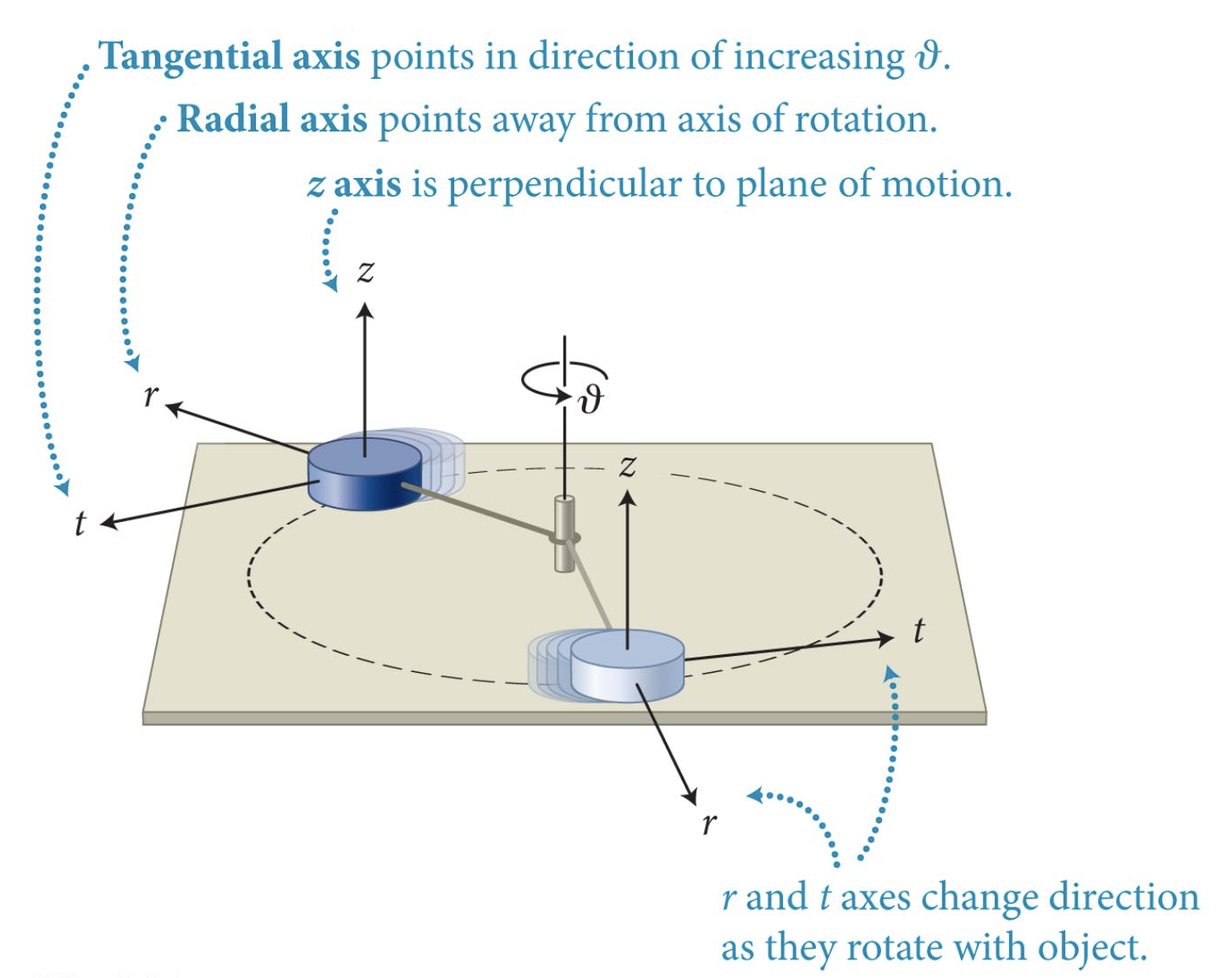
Eixo tangencial e aponta na direção do aumento da coordenada angular.
Eixo radial e aponta para longe do eixo de rotação.
Eixo normal e é perpendicular ao plano de rotação.
Os eixos r e t mudam de direção quando eles giram com o objeto.
Os eixos são perpendiculares e têm a direção dos vetores unitários radial (\(\hat r\)) e tangencial (\(\hat t\)).
Fonte: Eric Mazur
O movimento circular
O movimento circular



Modelando o movimento circular
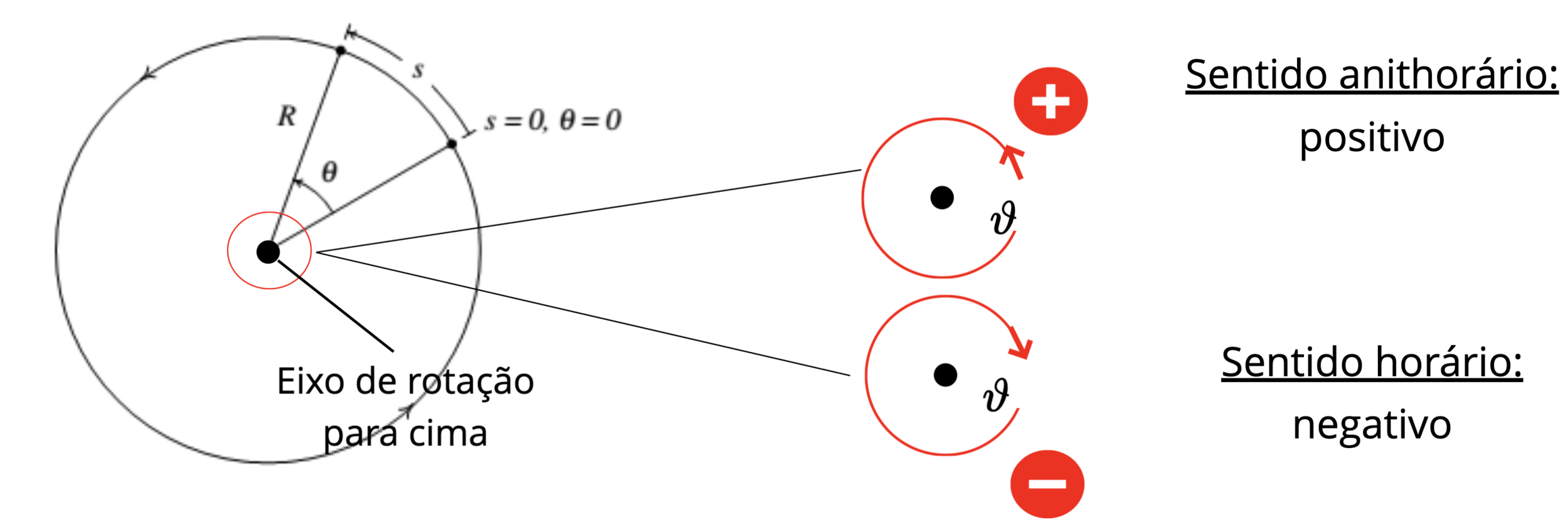
A orientação da rotação em relação ao eixo de rotação é uma convenção.
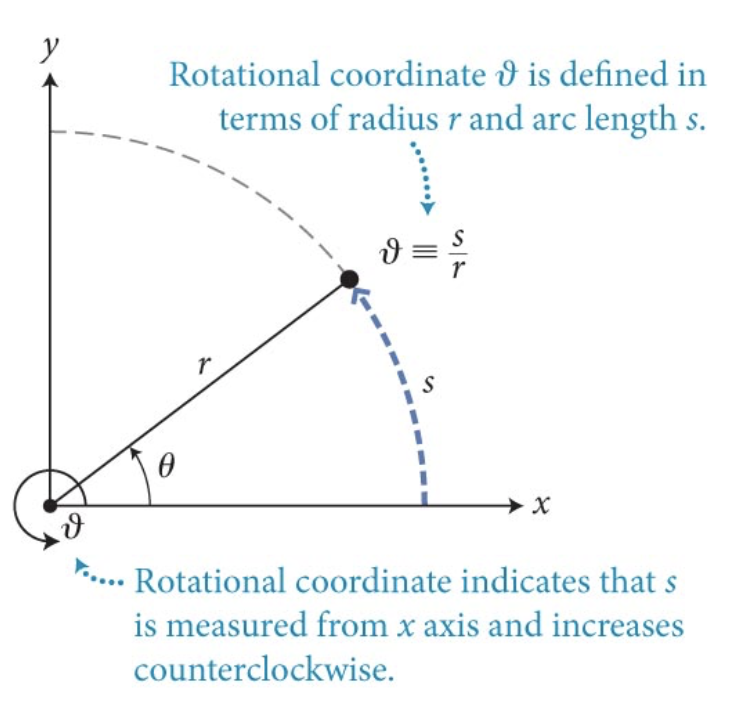
O ângulo polar, \(\theta\), de um objeto que se move ao longo de um círculo de raio, \(r\), é definido como o comprimento do arco, \(s\), sobre o qual o objeto se moveu dividido pelo raio:
Como as medidas do ângulo polar são feitas em radianos
mesmo que radiano não seja uma unidade.
Ao dividir as grandezas \(s/r\), com dimensões de comprimento, vê-se que \(\theta\) admensional.
arco
raio
O movimento circular
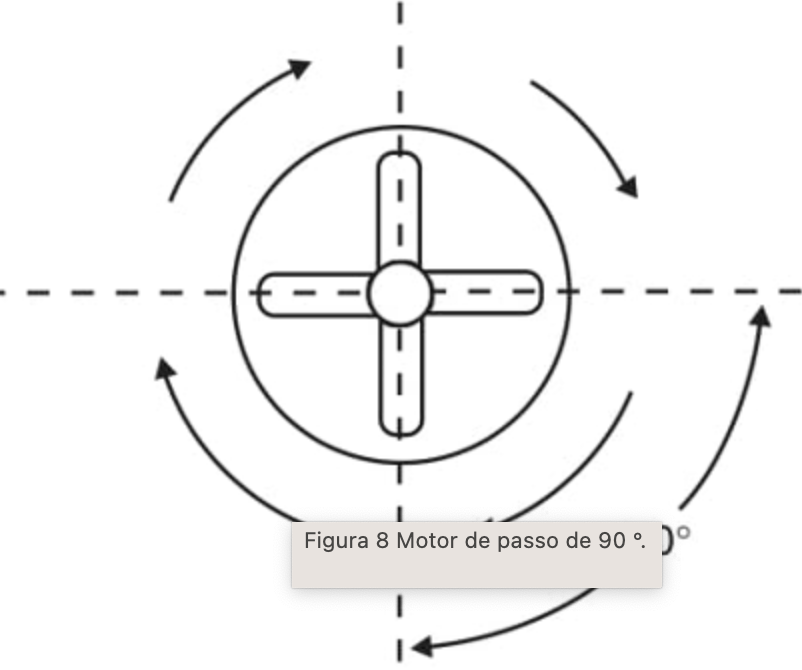
Motor de passo de 90 graus
O motor "para" 4 vezes ao completar uma volta.
Para completar 1 volta é necessário aplicar 4 pulsos.
1 volta =
O motor com ângulo de grau de \(1,8^o\), "para" quantas vezes?
Quantos pulsos são necessários para 1 volta? E se for um motor com redução 1:64?

A variação do ângulo polar, \(\Delta \theta\), é igual ao ângulo polar final menos o ângulo polar inicial, é
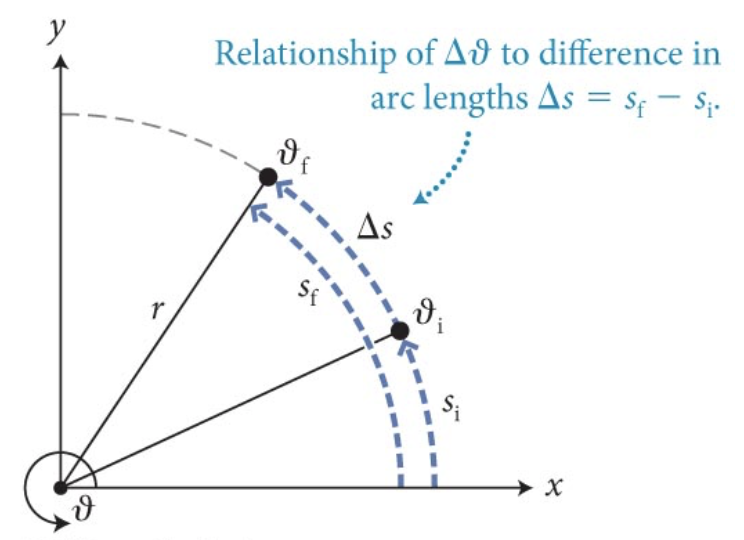
como
A variação do ângulo polar é igual a razão entre a variação do comprimento de arco pelo raio da circunferência:
O deslocamento angular.
Modelando o movimento circular
Velocidade angular e a velocidade tangencial.
A partir da definição de velocidade média:
E o mesmo para a velocidade tangencial instantânea:
e que \(\Delta s = r \Delta \theta\), existe uma relação entre a velocidade média e velocidade angular média, \(\omega_m\).
Modelando o movimento circular
- \vec v_m
A velocidade angular média é:
- \vec v_t
O movimento circular
Motor de passo de 1,8 graus
O motor com ângulo de grau de \(1,8^o\) "para" 200 vezes.
Ao aplicar 200 pulsos a cada segundo vamos saber a velocidade angular do motor:
A velocidade angular pode ter as seguintes unidades:
A frequência angular pode ter as seguintes unidades:
O movimento circular
Velocidade angular e frequência angular?
A velocidade angular do motor de passo de \(1,8^o\).
De forma geral, para uma volta completa:
O período é o tempo para completar 1 volta.
A frequência angular é o número de voltas por unidade de tempo.
A frequência angular do motor de passo \(f = 1 \text{ rps}\). Portanto, \(\omega_m = (2\pi \text{ rad)} f = 6,28\text{ rad}/\text{s}\).
O movimento circular
Engrenagens
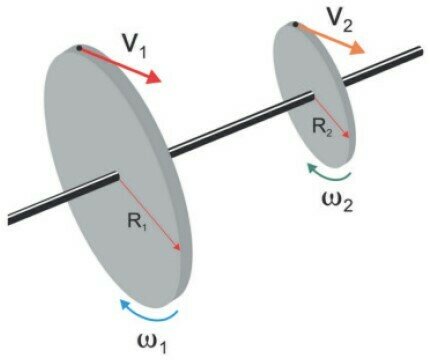
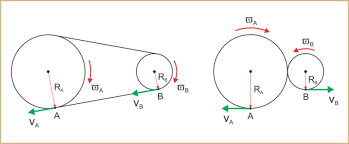
O movimento circular
Engrenagens
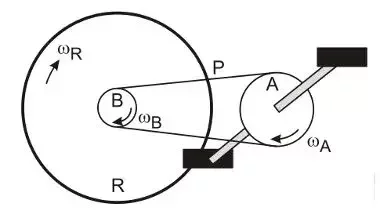
Quais as relações?
O vetor velocidade instantânea \(\vec v_t\) de um objeto em movimento circular é sempre perpendicular ao vetor posição \(\vec r\) do objeto medida a partir do centro da trajetória circular e tangente à trajetória.
O vetor velocidade média \(\vec v_m\) de um objeto em movimento circular é sempre paralelo ao vetor deslocamento \(\Delta \vec r\) do objeto.
Modelando o movimento circular
Os vetores velocidade média e velocidada tangengial instantânea.
Quando a rapidez do objeto não é constante temos uma aceleração tangencial instantânea.
A aceleração tangencial instantânea é uma medida da variação da rapidez tangencial no tempo:
e é tangente à trajetória. Sabemos que \(v_t = r \omega\).
A aceleração angular possui unidades SI de inverso do segundo ao quadrado: \(s^{-2}\).

Modelando o movimento circular
Aceleração tangencial constante
Aceleração radial também aumenta
causa aumento da rapidez
A aceleração tangencial instantânea.
A aceleração média.
No movimento circular à rapidez tangencial constante a magnitude da velocidade tangencial é constante no tempo, mas a direção varia no tempo.
Objetos em movimento circular têm uma aceleração diferente de zero, mesmo que estejam se movendo a rapidez constante, pois o movimento é curvilíneo.
A aceleração média é uma medida da variação da direção da velocidade tangencial no tempo:
- \vec v_i
- \vec v_f
- \Delta \vec v
tem a direção da variação da velocidade tangencial.

Modelando o movimento circular
A aceleração centrípeta.
A magnitude da aceleração média:
- \vec v_i
- \vec v_f
- \Delta \vec v_t
No limite \(\Delta t \rightarrow 0\), define-se a aceleração centrípeta:
A aceleração centrípeta de um objeto que executa um movimento circular à rapidez constante é direcionada radialmente para dentro.
A aceleração devido ao movimento circular mantem o objeto se movendo à rapidez \(v_t\) ao longo da circunferência de um círculo de raio \(r\).
Modelando o movimento circular

- \vec a_c
A aceleração resultante no movimento circular.
Podemos analisar as aceleração tangencial e centrípeta que estão contidas no plano.

Modelando o movimento circular
MCU

MCUV
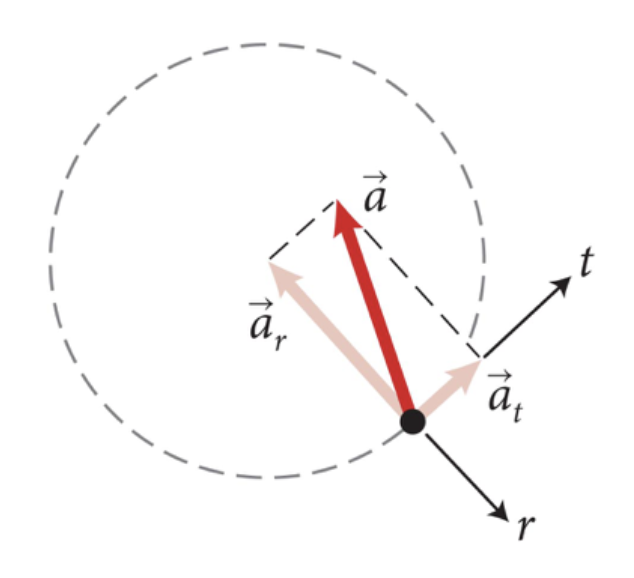
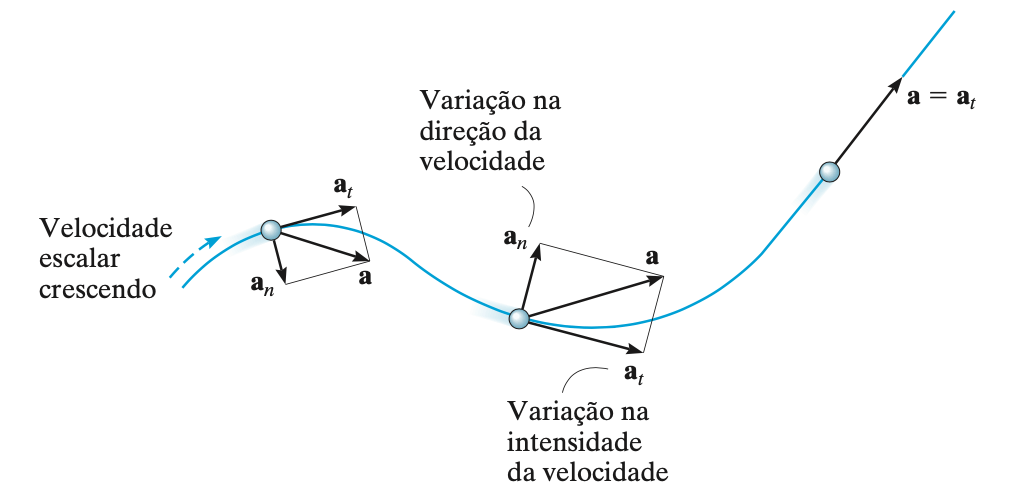
Aceleração resultante
A aceleração resultante no movimento circular.
Uma partícula movendo-se ao longo da trajetória curva terá acelerações direcionadas como mostrado.
Modelando o movimento curvilíneo
Existe uma relação entre as grandezas de translação e rotação;
Fonte: https://www.compadre.org
E que:
Modelando o movimento circular
Um disco está girando em torno do eixo central como um carrossel. A posição angular é θ(t) de uma reta de referência do disco é dada por
Fonte: https://www.compadre.org
Modelando o movimento circular
com t em segundos, θ em radianos e a posição angular zero indicada na figura.
Analise a cinemática do movimento.
Um disco D pode girar livremente em torno do seu eixo horizontal (C). Enrola-se uma corda na periferia do disco e um corpo A, ligado à corda é deixado cair sob ação da gravidade e da tração do fio. O movimento de A é uniforme acelerado, mas, sua aceleração é menor do que g. No instante t = 0, a velocidade do corpo A é de 0,04 m/s e, 2 s depois, o corpo desceu 0,2 m. Ache as acelerações tangencial e centrípeta , em qualquer instante, de um ponto na periferia do disco.
Modelando o movimento circular

Modelando o movimento circular
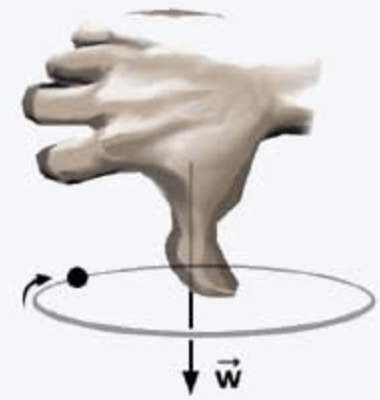
O vetor velocidade angular é pode ser representada como uma grandez vetorial de direção perpendicular ao plano do movimento e seu sentido é dado pela regra da mão direita.
Crédito: https://www.geogebra.org/m/ugsjfsy5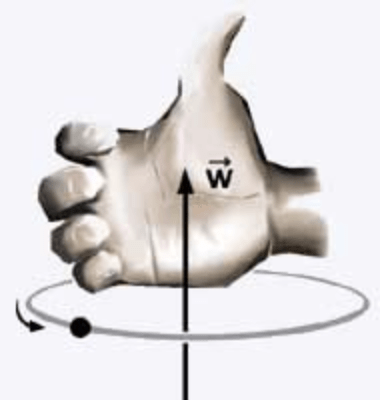
Crédito: http://www.cepa.if.usp.br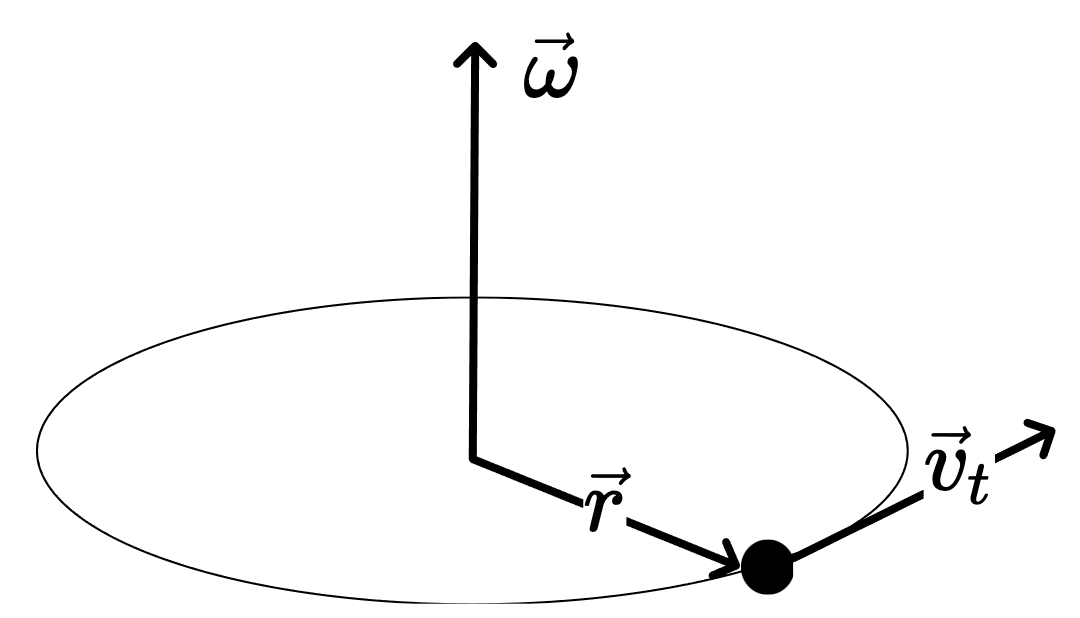
Se \(\theta = 90^o\)
Modelando o movimento circular
Como o vetor velocidade tangencial muda de direção no movimento circular, nós podemos calcular o vetor aceleração
Para um movimento circular uniforme, \(\vec \omega = constante\), a aceleração é centrípeta e perpendicular ao vetor velocidade tangencial:
ou
Se todos os ângulos são retos:
ou
Para um movimento circular não uniforme, a maginute da velocidade tangencial varia,
O movimento pode ser acelerado ou retardado.
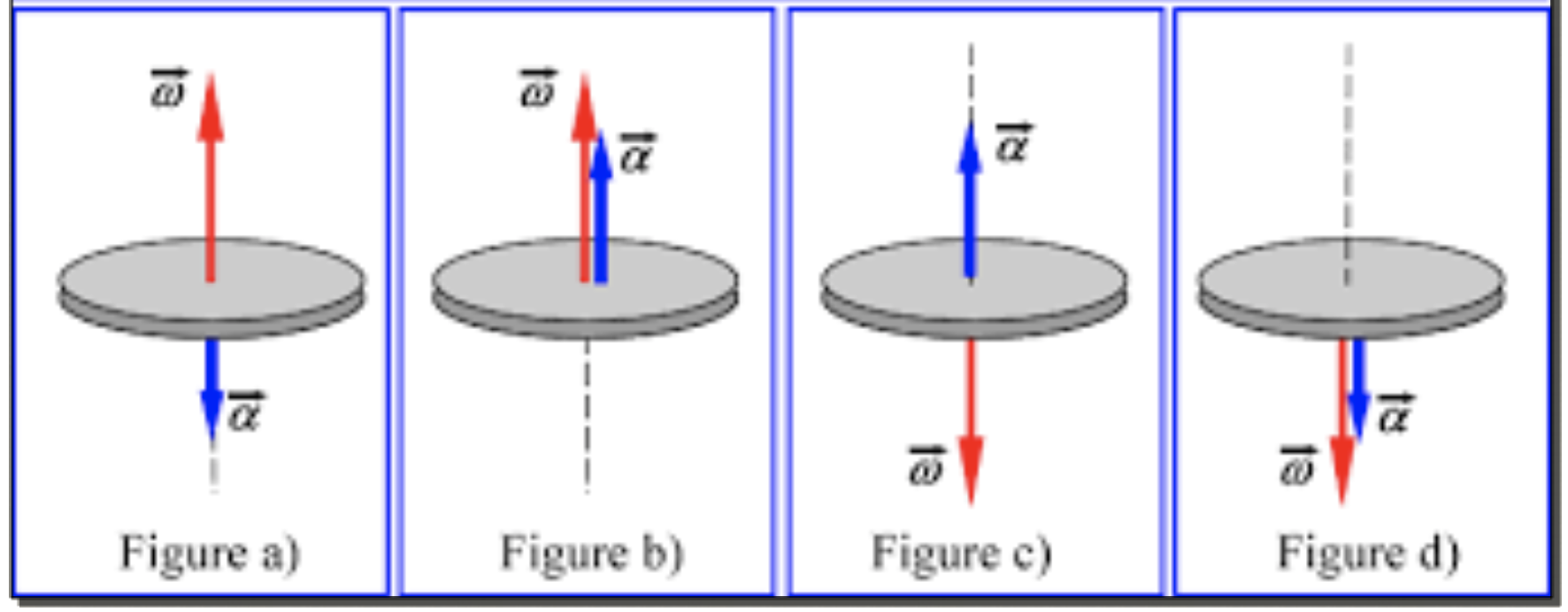
Retardado
Retardado
Acelerado
Acelerado
- \vec \omega \cdot \vec \alpha >0
- \vec \omega \cdot \vec \alpha >0
- \vec \omega \cdot \vec \alpha <0
- \vec \omega \cdot \vec \alpha <0
Modelando o movimento circular
A velocidade média angular e a aceleração média angular.
Exercício
Um carro de corrida C move-se em torno da pista circular com um raio de 300 m. Se o carro aumenta sua velocidade escalar a uma razão constante de 1,5 m/s\(^2\), partindo do repouso, determine o tempo necessário para ele alcançar uma aceleração de 2 m/s\(^2\). Qual é a velocidade escalar nesse instante?

Fonte: Hibbeler
Exercício
As caixas na figura deslocam-se ao longo do transportador industrial. Se uma caixa como na figura b parte do repouso em A e aumenta sua velocidade escalar de maneira que at = (0,2t) m/s\(^2\), em que t é dado em segundos, determine a intensidade de sua aceleração quando ela chega ao ponto B.
Fonte: Hibbeler


