Visuomotor Policies
(via Behavior Cloning)
a prelude to RL and Control

MIT 6.4210/2:
Robotic Manipulation
Fall 2022, Lecture 17

Follow live at https://slides.com/d/KfJ018c/live
(or later at https://slides.com/russtedrake/fall22-lec17)
policy needs to know
state of the robot x state of the environment
The MIT Leg Lab Hopping Robots
http://www.ai.mit.edu/projects/leglab/robots/robots.html
What is a (dynamic) model?
System
State-space
Auto-regressive (eg. ARMAX)
input
output
state
noise/disturbances
parameters

2017
Levine*, Finn*, Darrel, Abbeel, JMLR 2016
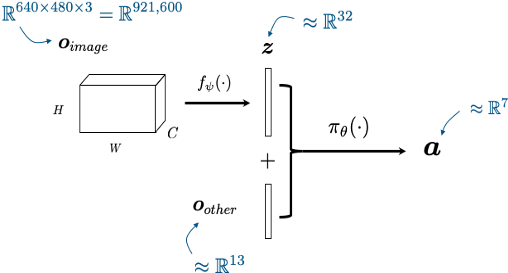
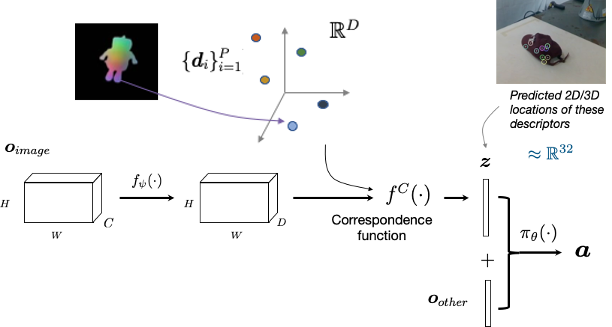
Visuomotor policies
Idea: Use small set of dense descriptors
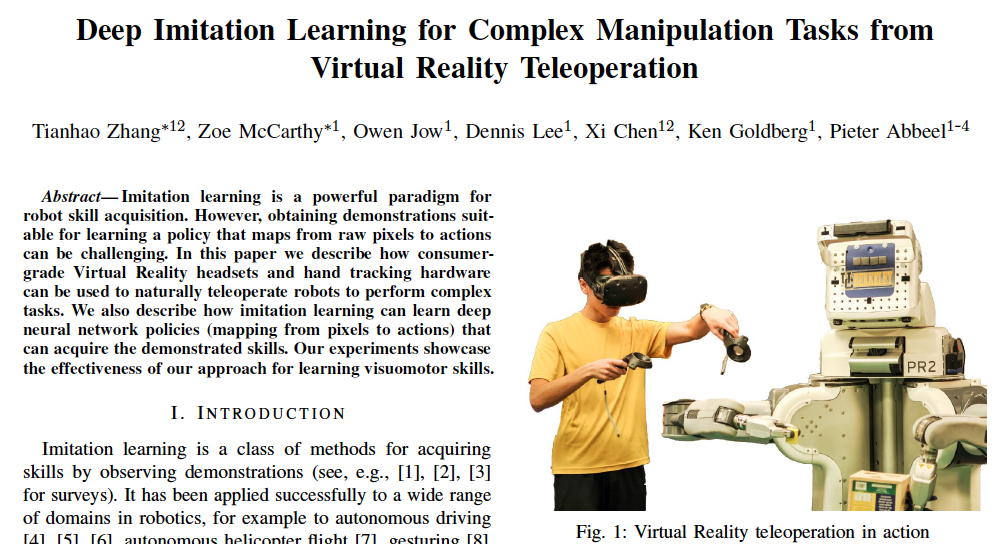
Imitation learning setup
from hand-coded policies in sim
and teleop on the real robot
Standard "behavior-cloning" objective + data augmentation
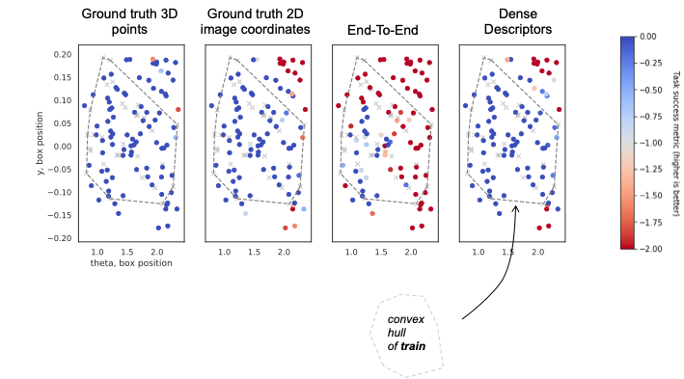
Simulation experiments
"push box"
"flip box"
Policy is a small LSTM network (~100 LSTMs)
"And then … BC methods started to get good. Really good. So good that our best manipulation system today mostly uses BC, with a sprinkle of Q learning on top to perform high-level action selection. Today, less than 20% of our research investments is on RL, and the research runway for BC-based methods feels more robust."

Andy Zeng's MIT CSL Seminar, April 4, 2022
Andy's slides.com presentation