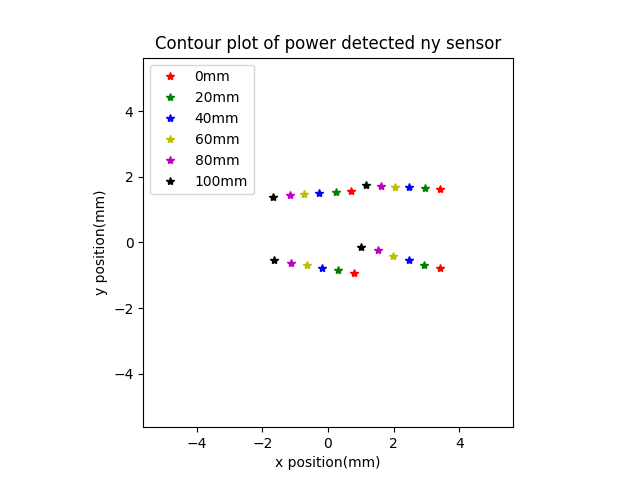
予定な進行方向
0mm
40mm
100mm
実際の進行方向
偏移量
\theta
センサー
センサー
\phi
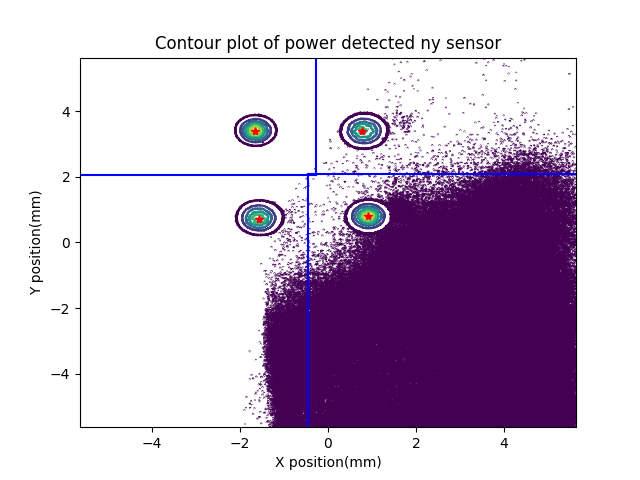
P=\max\limits_{(x,y)\in D}{\{power(x, y)\}}
範囲以内最も強いパワーの数値を計算して
D
E=\{(x,y)|power(x,y)\geq kP \}
(x_c, y_c)=\frac{\sum\limits_{(x,y) \in E}(x, y)}{|E|}
\Delta d
r
h
\Delta S=\frac{1}{2}4\phi r^2-\Delta d \sqrt{r^2-\left(\frac{d}{2}\right)^2}
\phi
\approx \left(\frac{\pi}{2}-\frac{\Delta d}{r}\right)2r^2-\Delta dr^2
\phi=\cos^{-1}\left(\frac{\Delta d}{r}\right)
\approx \pi r^2-2r\Delta d
\text{We assume } r,\,d \text{ are small}
\text{損失率 }= \,\frac{2r\Delta d}{\pi r^2}=\frac{2\Delta d}{\pi r}
\delta
\Delta s
\Delta d_{degree}
\Delta d_{degree}\approx\delta \Delta s
\Delta d_{degree}\approx1^{\circ}\cdot1mm
\approx 0.0175mm
\theta
\text{損失率 }=\,1-\cos\theta