SDP Code Base Presentation
Simon Rovder


Two Main Chunks:
- Vision System
- Strategy Module
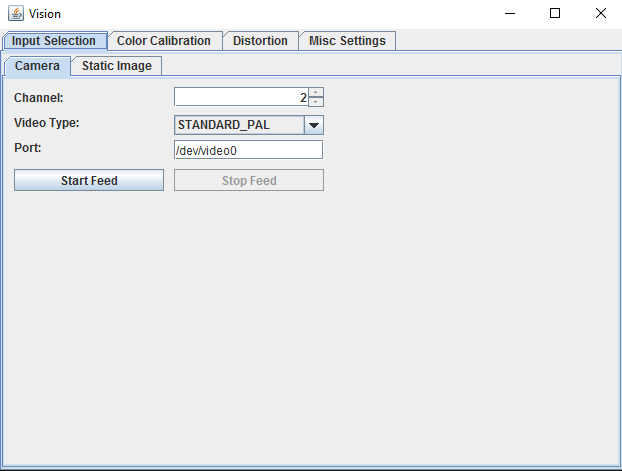
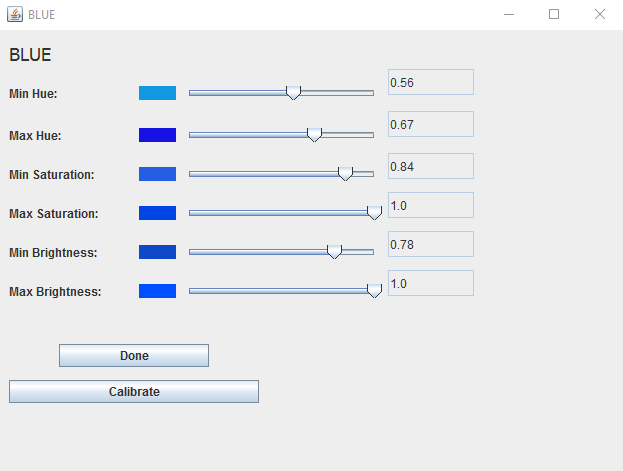
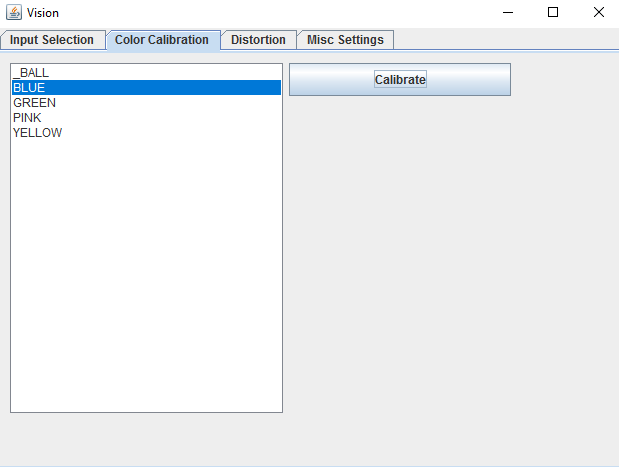
Vision System Pipeline
- Input Selection
- Spot Analysis
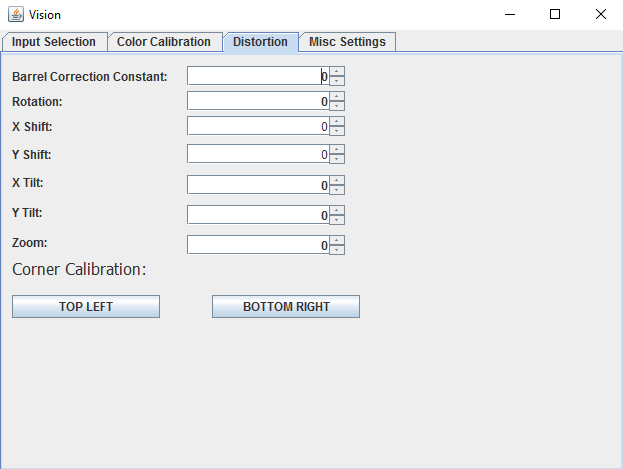
- Undistortion
- Robot Detection
- Time Analysis
VectorGeometry
0,0
0,0
Dynamic Points
Points that calculate themselves
- getX();
- getY();
- recalculate();
Examples of such points:
- Constant Point
- Ball Point
- Robot Point
- Mid Point
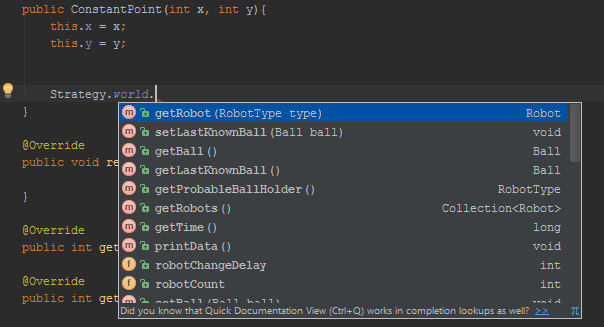
Strategy is implemented as a single loop on a timer.

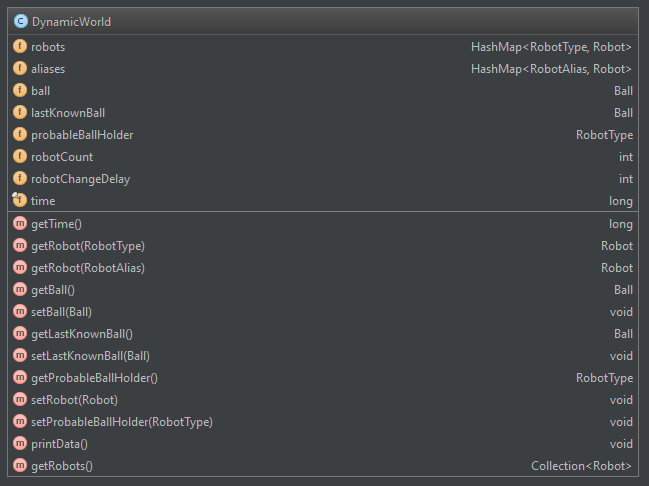
Everything in strategy has access to the public static Strategy.world variable
Robots!
- Robot Port
- Drive Class
- List of Controllers
What must be implemented for a Robot, in order for it to work with our system:
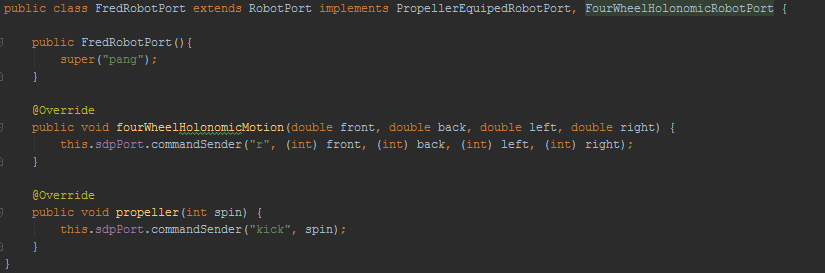
Ports
The Port class simply contains the commands that the robot understands
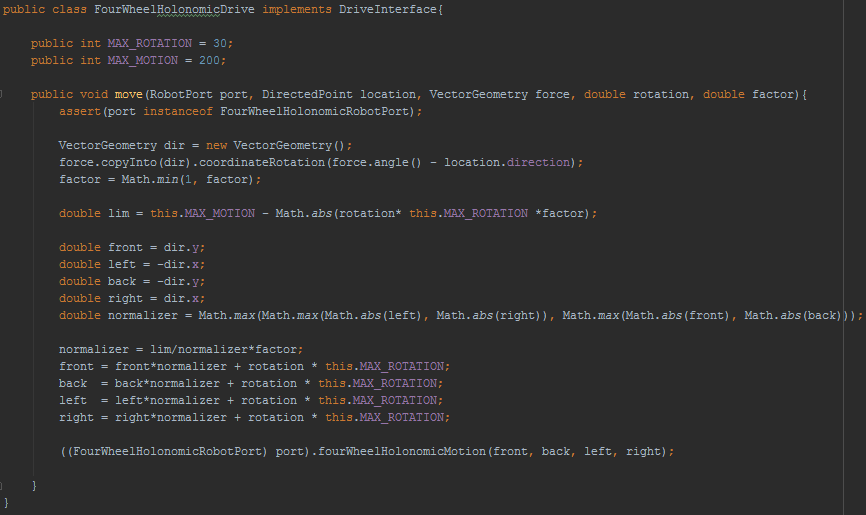
Drives
The task of a Drive is to mediate between the Navigation System and the RobotPort.
The Drive class only has one function, which takes in these arguments:
- The Port of the Robot it is to drive
- The location of the Robot
- The immediate direction the Robot should move in
- The angle it needs to turn in order to face the correct direction
- A factor of speed (usually depends on how close the robot is to the destination)
Controllers
Automating Generic Tasks
Controllers
Controllers are a simple mechanism for automating the Robots' behaviour. Every robot can have many controllers, each of which can be turned on and off whenever.
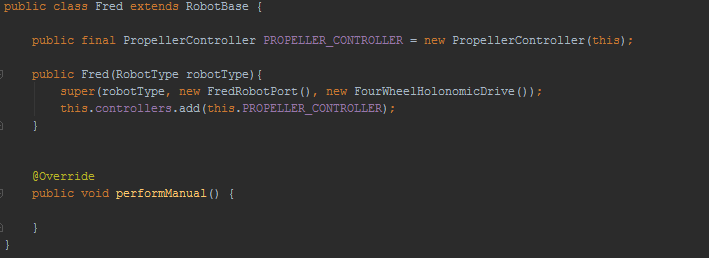
Every Robot comes with a MotionController and an ActionController. In addition to these you may give your robot some special controllers, for example Fred had a PropellerController.
Every controller has a perform() method. Every Strategy Cycle, the perform() method of every controller of every robot is triggered.
Propeller Controler
The PropellerController simply made sure that the propeller was always spinning in the 'most favourable direction'
It also stopped the propeller from spinning when the robot was in a more tight situation (eg. touching another robot)
Motion Controller
The Motion Controller navigates the Robot. It has two noteworthy methods:
setDestination(DynamicPoint destination)
setHeading(DynamicPoint heading)
Every Strategy Cycle, it evaluates the desired path the robot should take and computes a vector of the direction the robot should be moving in at this moment.
It then uses the aforementioned Drive class to actually move the robot.
Navigation Techniques
The Motion Controller uses two main techniques to navigate the robot. These are A* Search and Potential Fields.
It automatically decides on which one of these systems is better given the current state of the world.
Action Controller
The Action Controller is the main Controller. It is within this Controller where the program decides what it should have the other controllers do (or whether to turn them on or off).
It has one important function:
setAction(ActionInterface action);
Actions
The Behavioural Finite State Machines
Actions
An Action is where you decide what to tell your other Controllers to do. Actions can be used to model any kind of behaviour in the form of a state machine.
They have two important methods:
tok() - This is where your decision making logic goes. It is where you decide what state to go into next. (For example you could check who has the ball, whether the ball is moving, where your teammate is etc.)
enterState(int newState) - This is where you actually perform things associated with the change of state. (For example you tell your robot to kick. Or you could set the destination in your Motion Controller to be the Midpoint between the two opponent robots to block a pass)
Actions
Actions also have two built-in functions (in the abstract class you extend):
delay(long millis) - Delays the execution of the action. In other words, tok() will not be called until the delay expires.
enterAction(ActionBase action, int successState, int failState) - In the spirit of Finite State Machines, you may ask your action to execute a "sub-action". If you do this, the tok() method of your higher action will not be called, instead the tok() method of the lower action will be called.
When the sub-action terminates, enterState() will be called on your higher action based on whether the sub-action failed or succeeded.
Action Chains
Action A
Action B
Action C
tik()
tik()
tik()
tok()
Statefull Actions
Aditional Method getState()
How to get your robot to work?
- Make the robot respond to "ping"
- Make the robot be able to stop ("f") and to halt ("h").
- Give the robot wheels and some way of controlling their speeds.
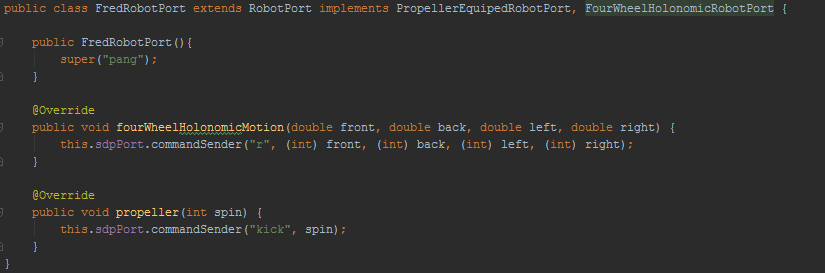
- Implement your RobotPort class (extend RobotPort)
- Implement your Drive class (implement DriveInterface)
- Stitch all this together in a Robot class (extend RobotBase)
- Done. : )
Useful Materials
The code contains the text "SDP2017NOTE" in comments wherever there is an important section. grep for these comments to find all the noteworthy bits.
More support material can be found on:
https://fred.rovder.com/