CALIPSO
A Differentiable Solver for Trajectory Optimization
with Conic and Complementarity Constraints



Taylor Howell
thowell@stanford.edu
Simon Le Cleac'h
simonlc@stanford.edu
Zachary Manchester
zacm@cmu.edu

Kevin Tracy
ktracy@cmu.edu
interesting constraints are everywhere in robotics
interesting constraints are everywhere in robotics
complementarity
interesting constraints are everywhere in robotics

complementarity
cones
non-negative orthant
second-order
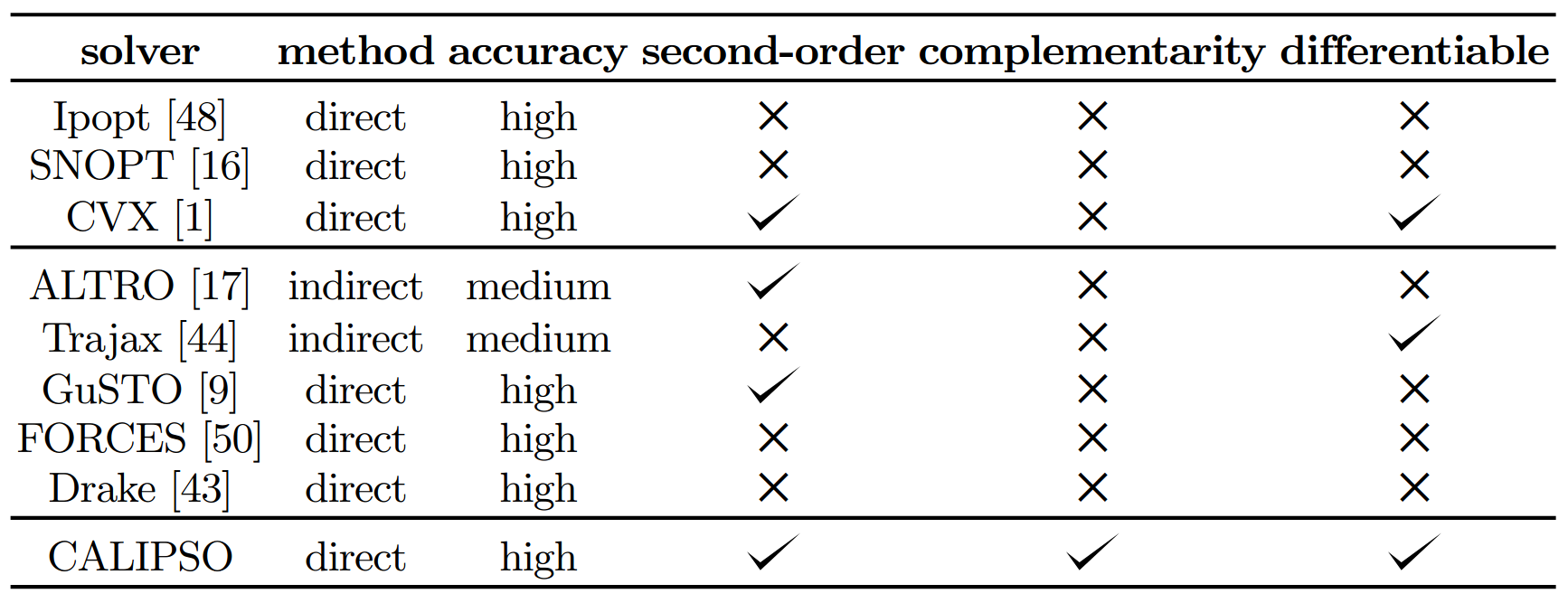
existing tools
existing tools
key ideas
primal-dual
augmented Lagrangian
complementarity constraints
state-triggered constraints

key ideas
primal-dual
augmented Lagrangian
complementarity constraints
interior-point
cone programming
inequality + second-order cone constraints

state-triggered constraints
impact
friction
key ideas
primal-dual
augmented Lagrangian
complementarity constraints
interior-point
cone programming
inequality + second-order cone constraints
implicit
differentiation
gradients through solver
state-triggered constraints
impact
friction
untuned
tuned
examples
ball-in-cup
bunny hop
quadruped gait
drifting
examples
ball-in-cup
bunny hop
quadruped gait
drifting
https://github.com/thowell/CALIPSO.jl

https://arxiv.org/abs/2205.09255
CALIPSO
A Differentiable Solver for Trajectory Optimization
with Conic and Complementarity Constraints
Taylor Howell, Kevin Tracy, Simon Le Cleac'h, Zachary Manchester
https://arxiv.org/abs/2205.09255
https://github.com/thowell/CALIPSO.jl

https://github.com/thowell/CALIPSO.jl
open-source solver
https://github.com/thowell/CALIPSO.jl
open-source solver
examples
https://github.com/thowell/CALIPSO.jl
open-source solver
examples
documentation
motivation

planning
motivation
planning
model-predictive control
motivation
for non-smooth systems
planning
model-predictive control
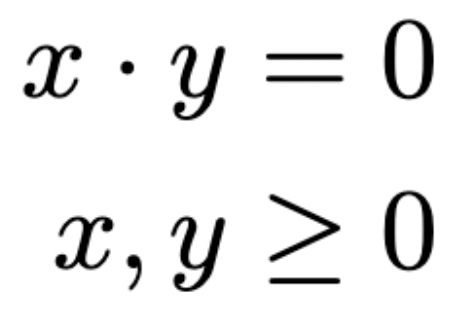
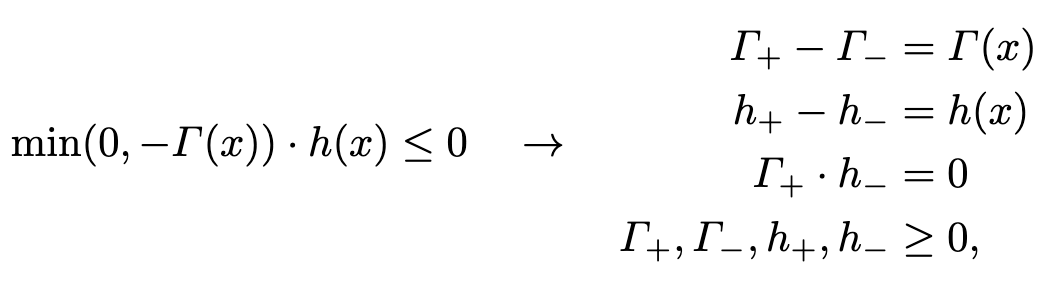
complementarity constraints
complementarity constraints
complementarity constraints
cone constraints
cone constraints
positive orthant
cone constraints
positive orthant
second-order cone
cone constraints
positive orthant
second-order cone
non-differentiable
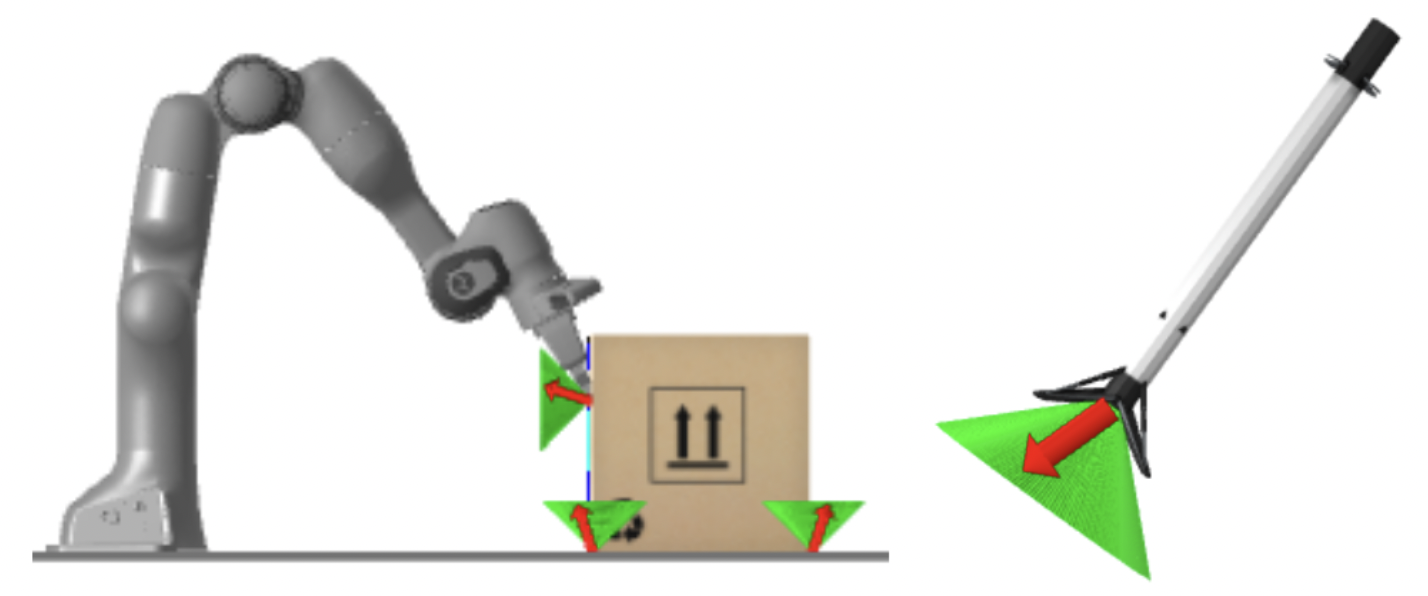
application to robotics
application to robotics
friction cones
application to robotics
friction cones
impact constraints
application to robotics
friction cones
impact constraints
thrust limits
application to robotics
friction cones
impact constraints
thrust limits
state-triggered constraints
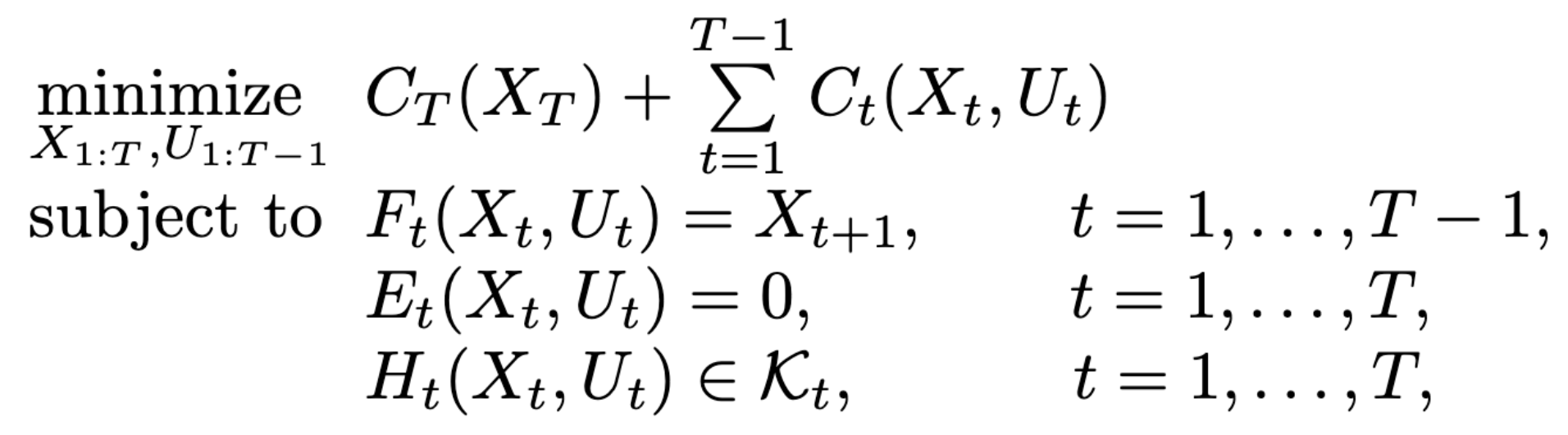
contact-implicit trajectory optimization
1D particle + impact + goal
contact-implicit trajectory optimization
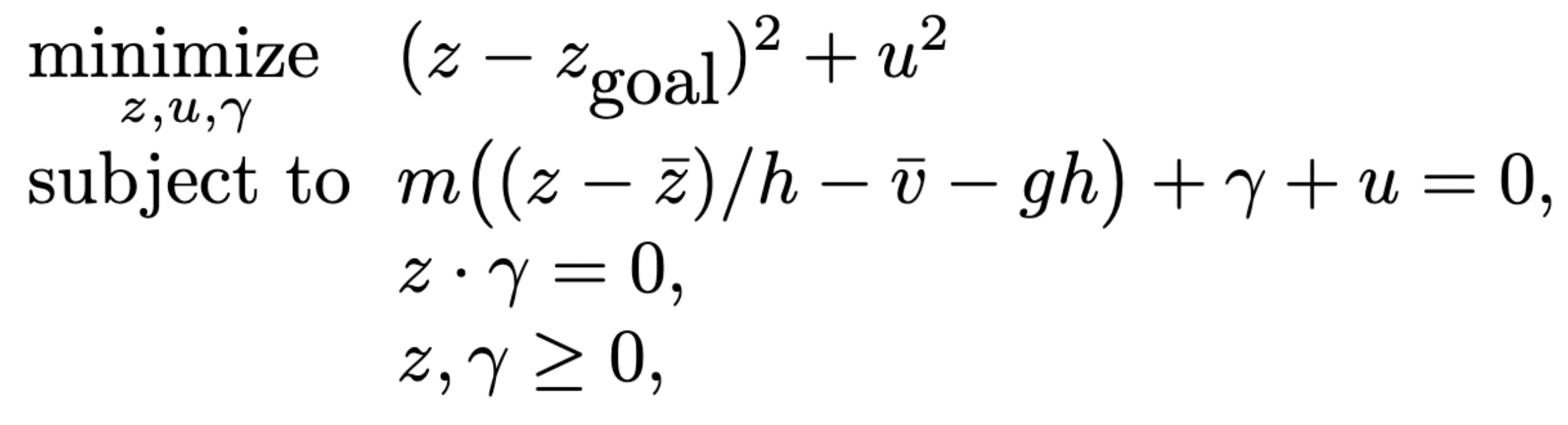
contact-implicit trajectory optimization
contact-implicit trajectory optimization
complementarity constraints
contact-implicit trajectory optimization
cone constraints
contact-implicit trajectory optimization

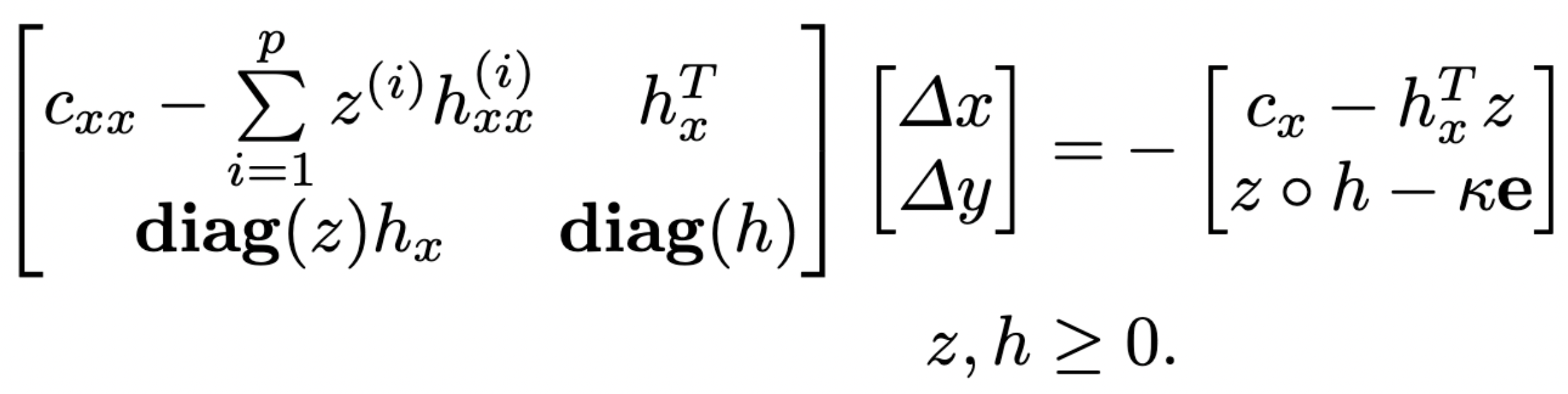
Lagrangian
contact-implicit trajectory optimization
Lagrangian
KKT system
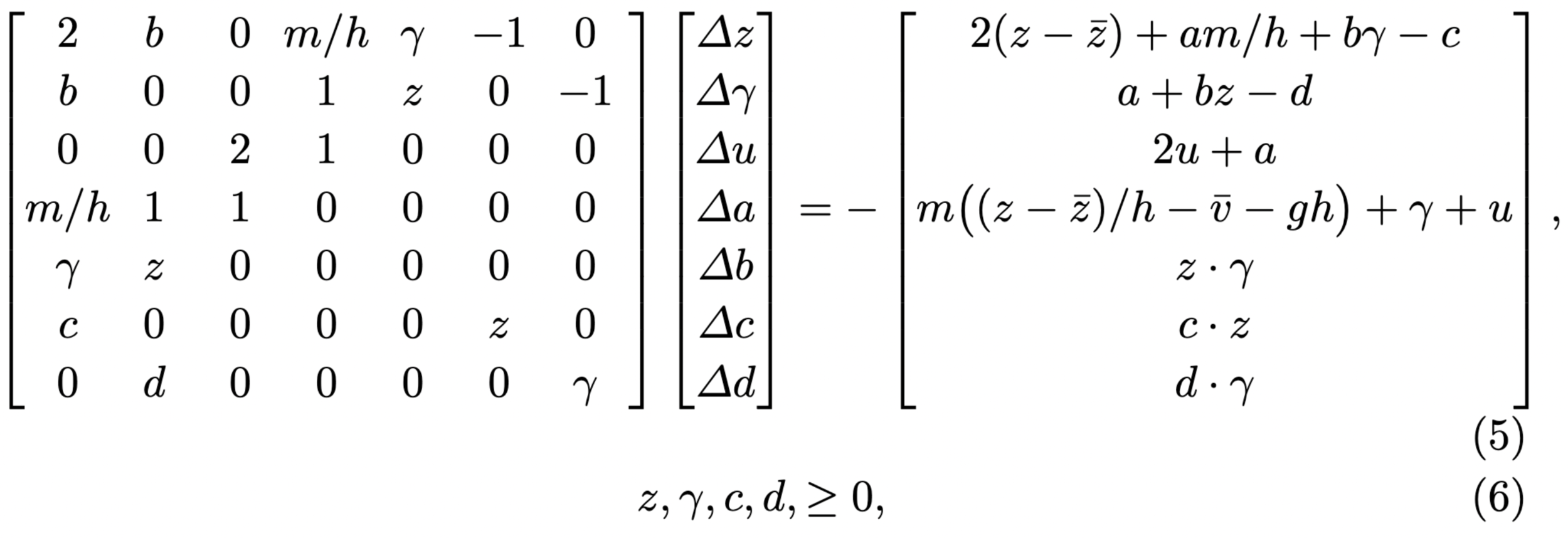
contact-implicit trajectory optimization
Lagrangian
KKT system
linear independence constraint qualification (LICQ) violation
contact-implicit trajectory optimization
Lagrangian
KKT system
cone variables
contact-implicit trajectory optimization
Lagrangian
KKT system
complementarity constraints
how do we solve these problems?
general-purpose solvers

trajectory-optimization solvers
trajectory-optimization solvers
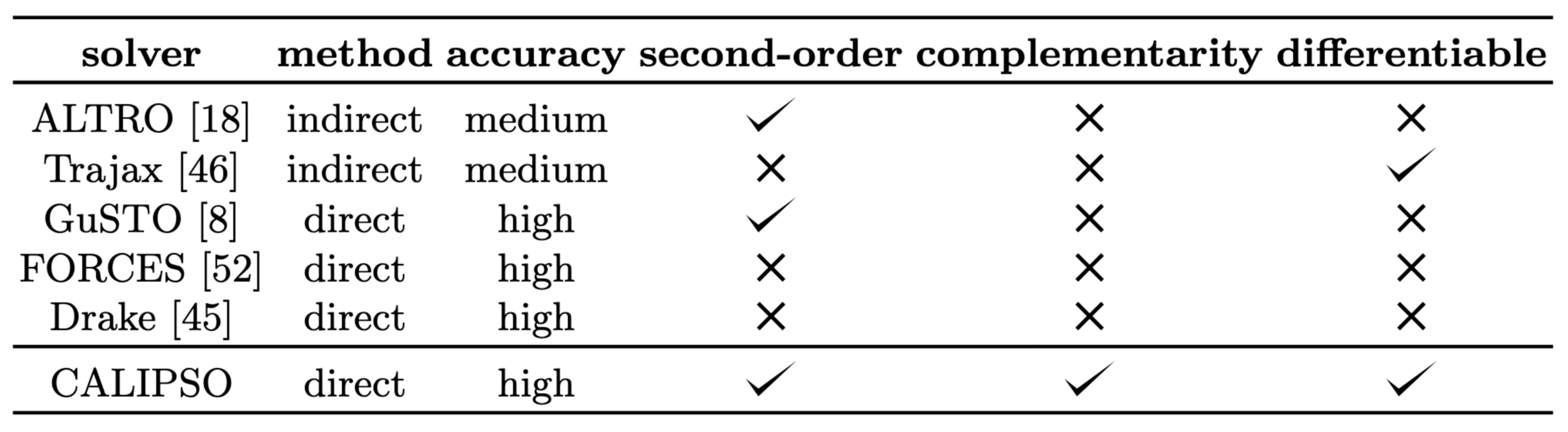
trajectory-optimization solvers
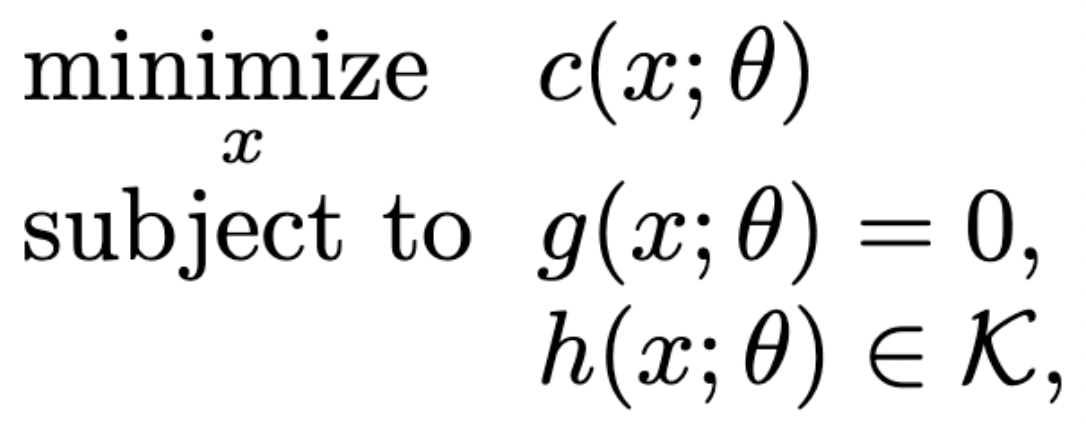
CALIPSO key ideas
CALIPSO key ideas
primal-dual
augmented Lagrangian
complementarity constraints
CALIPSO key ideas
primal-dual
augmented Lagrangian
complementarity constraints
interior-point
cone programming
inequality + second-order cone constraints
CALIPSO key ideas
primal-dual
augmented Lagrangian
complementarity constraints
interior-point
cone programming
inequality + second-order cone constraints
implicit
differentiation
gradients through solver
augmented Lagrangian
augmented Lagrangian

augmented Lagrangian

primal method
augmented Lagrangian
primal method
primal-dual method
augmented Lagrangian
primal method
primal-dual method

dual update
interior-point
interior-point

interior-point

primal method
interior-point
primal method
primal-dual method
CALIPSO solver
CALIPSO solver
primal-dual augmented Lagrangian
CALIPSO solver
primal-dual augmented Lagrangian
interior-point method
CALIPSO solver
primal-dual augmented Lagrangian
interior-point method
problem data
implicit differentiation
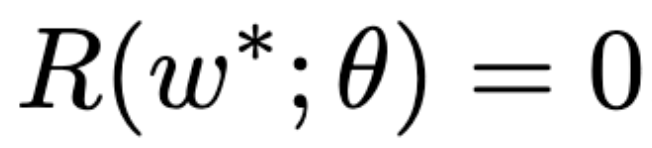
solver finds a fixed point
implicit differentiation
solver finds a fixed point
solution sensitivities are efficiently computed
examples
https://github.com/thowell/CALIPSO.jl
CALIPSO
quadruped
ball-in-cup
bunny hop
drifting
contact-implicit trajectory optimization
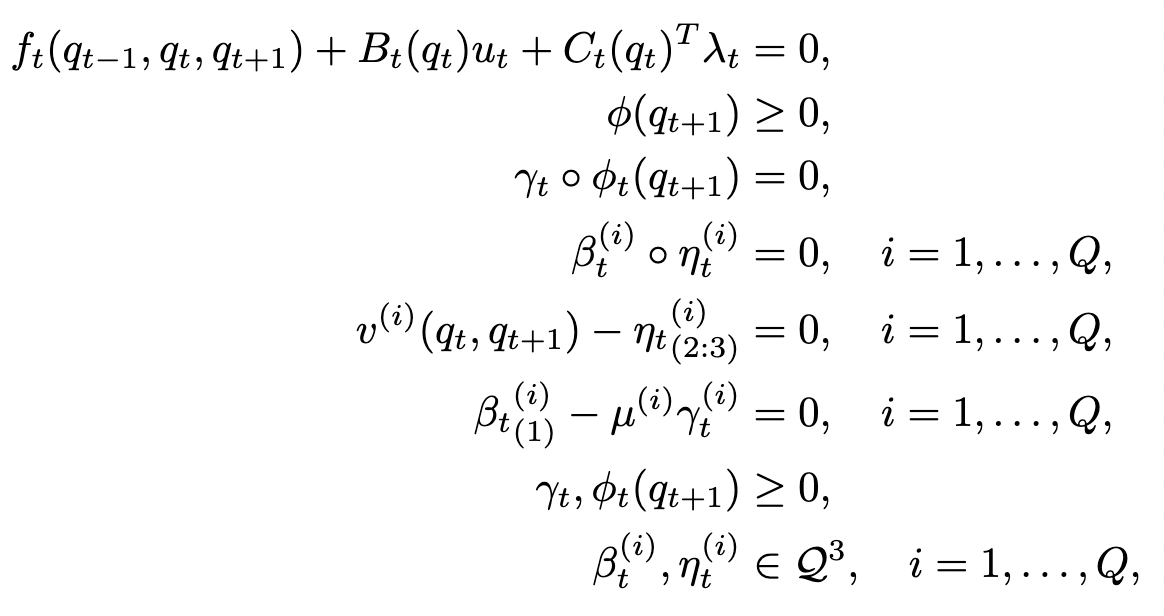
dynamics at each time step
- complementarity
- impact
- friction cones
CYBERDRIFT
model: Dubins car model subject to friction
ball-in-cup
model: end effector, ball, and string
bunny hop
model: body mass attached to two wheels via springs + dampers
quadruped gait
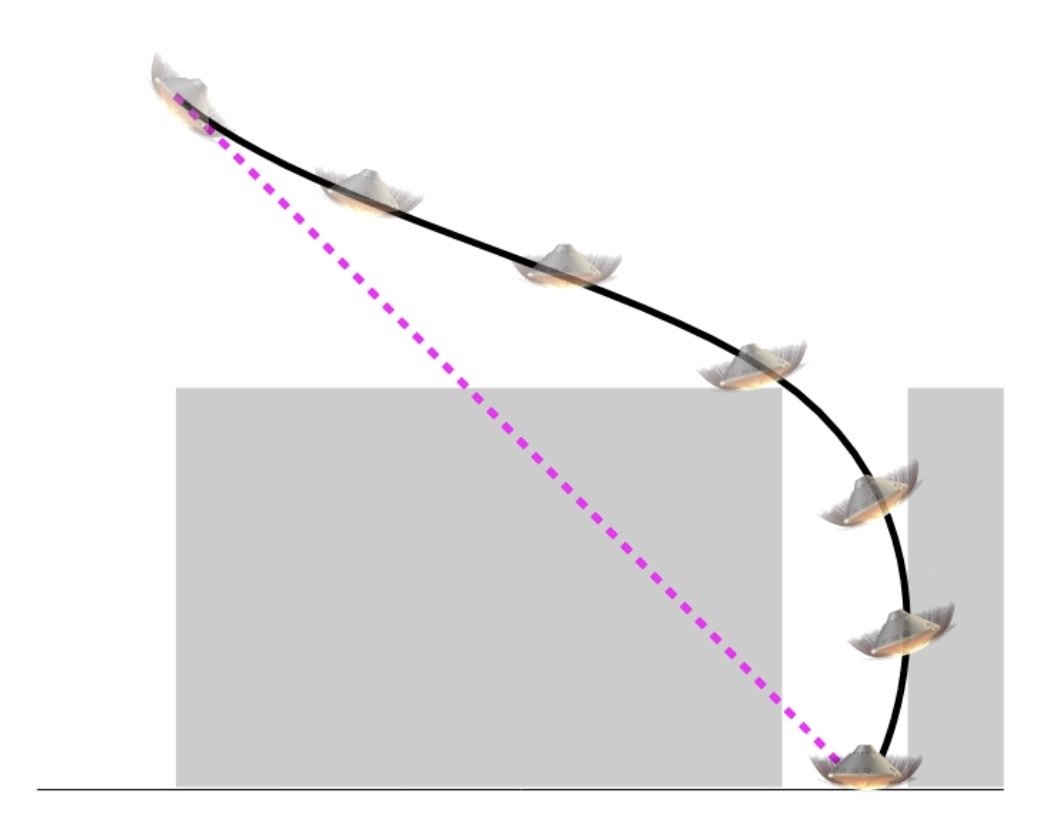
state-triggered constraints
non-smooth
complementarity
state-triggered constraints
non-smooth
complementarity
rocket landing
optimal unconstrained solution
state-triggered constraint solution
MPC autotuning
MPC autotuning
track reference trajectory
MPC autotuning
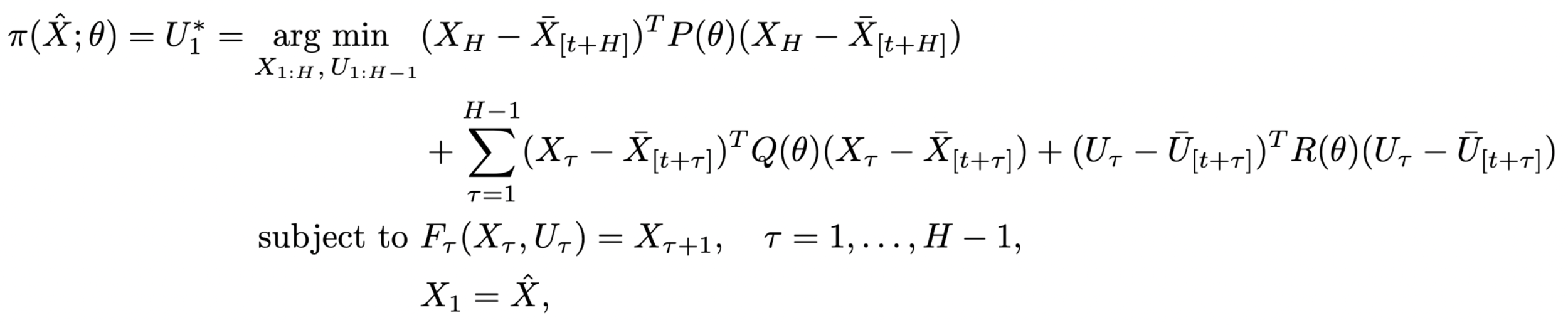
track reference trajectory
linear MPC policy
MPC autotuning
track reference trajectory
linear MPC policy
learn policy objective weights
acrobot swingup
open loop
(unstable)
acrobot swingup
open loop
untuned MPC
(unstable)
acrobot swingup
open loop
untuned MPC
autotuned MPC
( < 10 gradient steps!)
(unstable)
future work
- semidefinite cones
- fast implementation for real-time MPC
- package precompilation
- JAX/Torch/Chainrules.jl
- codegen for embedded applications
Taylor Howell
Simon Le Cleac'h
Zachary Manchester
team
Kevin Tracy
roboticexplorationlab.org