Stochastic Dynamic Games in Belief Space
Wilko Schwarting, Alyssa Pierson, Sertac Karaman, Daniella Rus
LQR
iLQR
iterative LQ Games
iLQG
Belief Space iLQG
Belief Space Dynamic Games
Preliminaries
\(N\) agents \(\{1,\dots,N\}\)
Joint State: \(x_k \in R^{n_{x}}\)
Joint Action: \(u_k \in R^{n_{u}}\)
Joint Measurement: \(z_k \in R^{n_{z}}\)
Belief Dynamics
analogous to
Belief Update
Analytical Bayes filter solution intractable
Resort to EKF
Belief Update
Their Notation
Our Notation
Belief Update
\(\xi_k\) accounts for both measurement and transition noise
Vectorize belief:
POMDP Best Response Game
Expected Return for agent \(i\)
\(c_l\) - cost at final time-step (terminal cost)
\(c_k\) - cost for any intermediary time step
((\(\pi^i\) is a function of \(\pi^{\neg i}\)))
Iterative Dynamic Programming
Necessary condition of local Nash Equilibrium:
Optimize over perturbations
Quadratic Value Approximation
Nominal
Feed-forward
Feedback
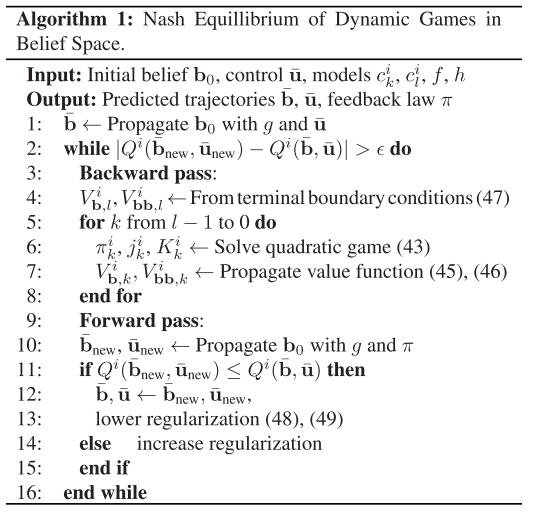
Backward Pass
Forward Pass
Control Regularization
Belief Regularization
Experimental Results
Active Surveillance
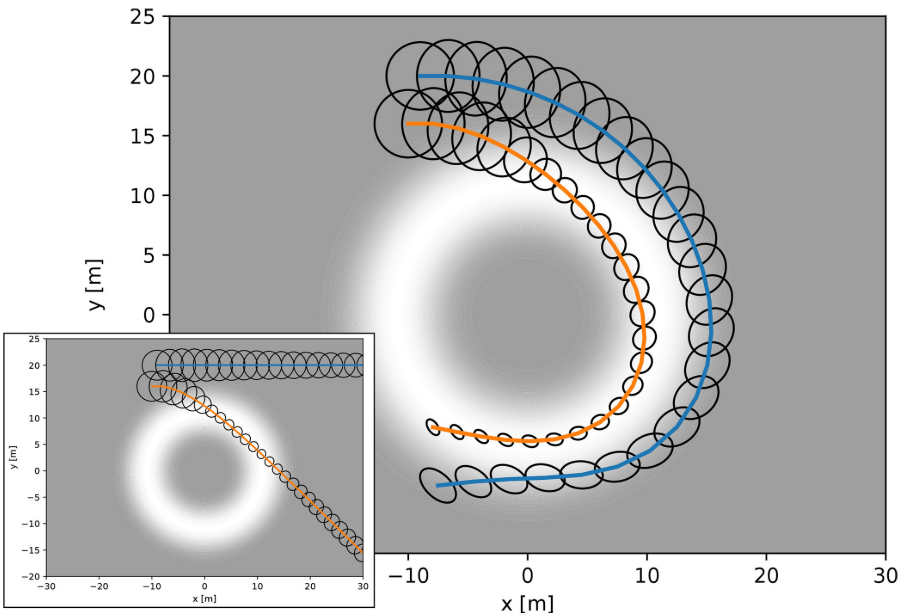
Agent 1 - observe agent 2
Agent 2 - maintain constant speed
Experimental Results
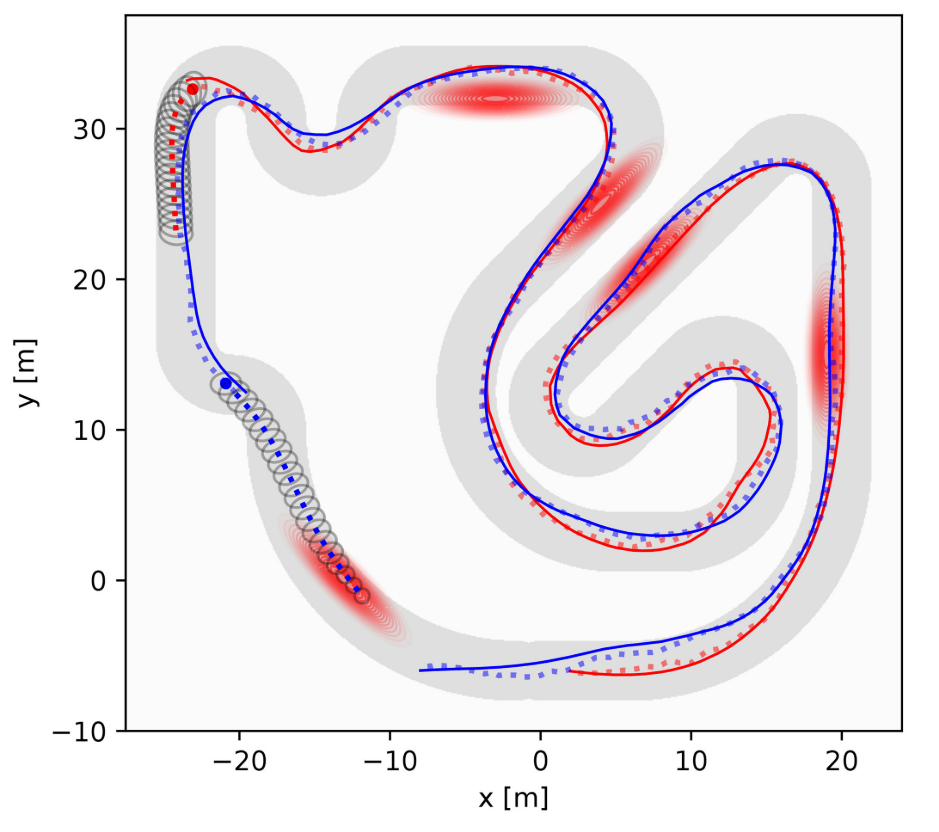
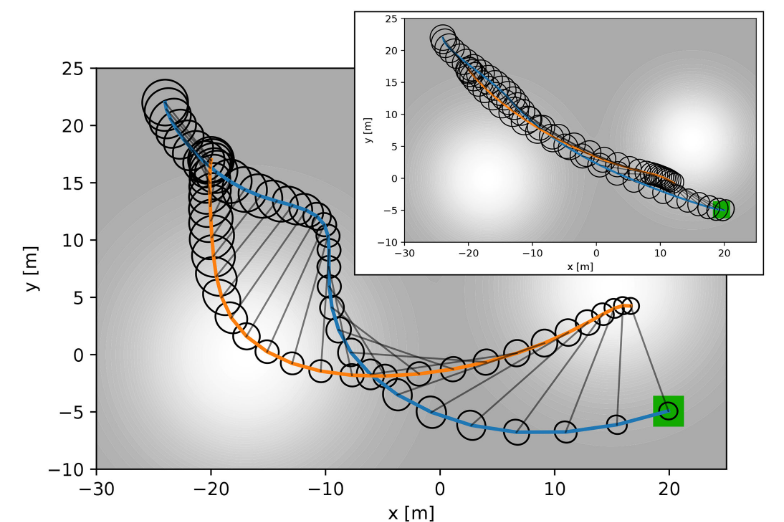
Guide Dog for Blind Agent
Agent 1 - Guide agent 2 to goal with low unceratainty
Agent 2 - No navigational control
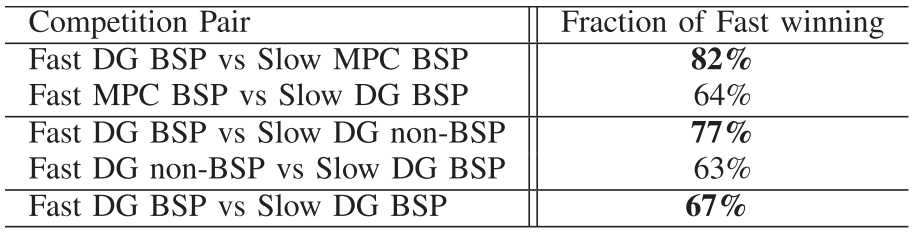
Experimental Results
Competitive Racing
Agent 1 - Faster than agent 2 but starts behind agent 2
Agent 2 - Slower than agent 1 but starts ahead