
Our Herbie Family
陳威融
Warner Chen
No. 4

楊沐穎
Remy Yang
No. 7
程俊壹
Joey Cheng
No. 9
張仕嘉
Scott Chang
No. 15
林建帆
Ryan Lin
No. 16




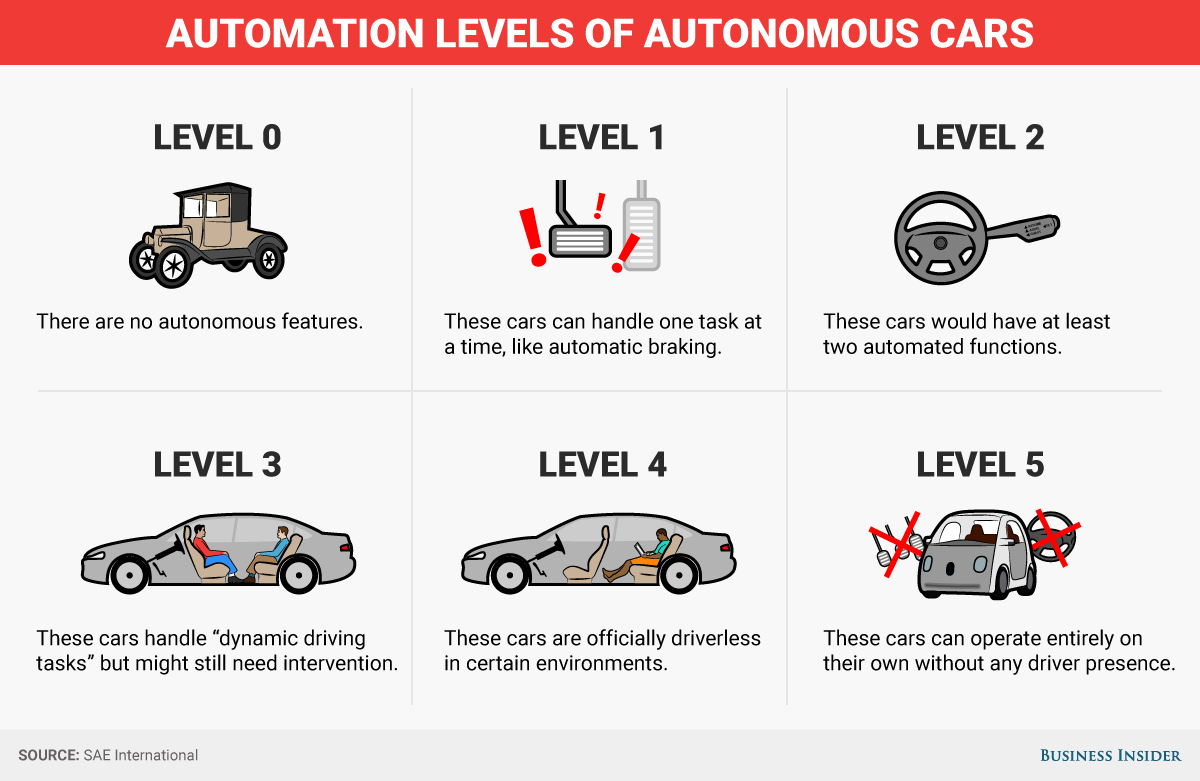
Project Scope
ISSUES
MISSION
- Truck driver shortage
- Truck driver fatigue accidents
To create an autonomous RC truck that can navigate a race course using:
- Image Recognition
- Deep Learning

Donkey Car

Tamiya RC car chassis
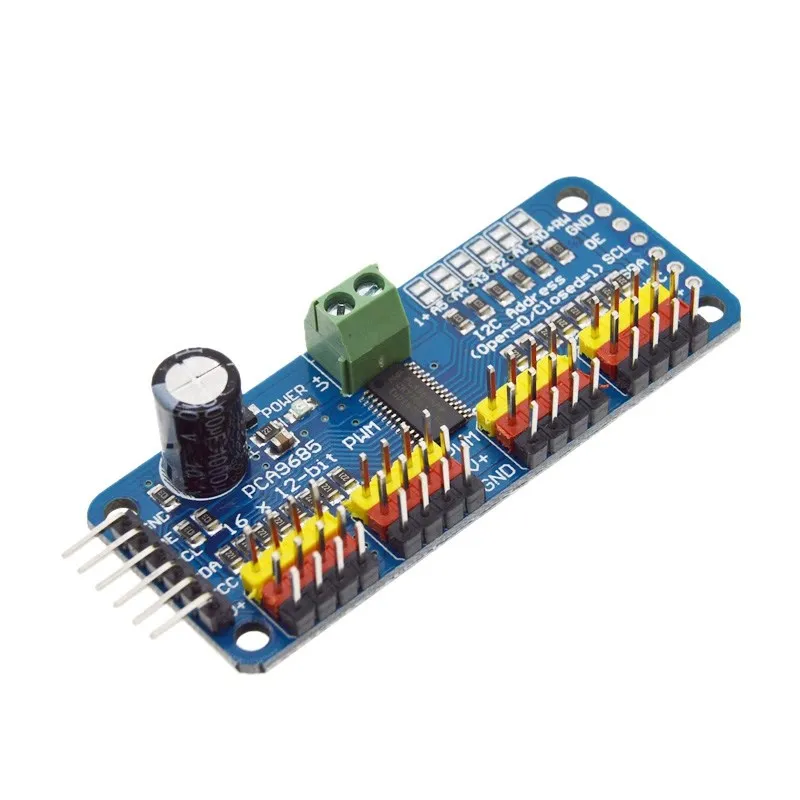
PWM
Servo Driver
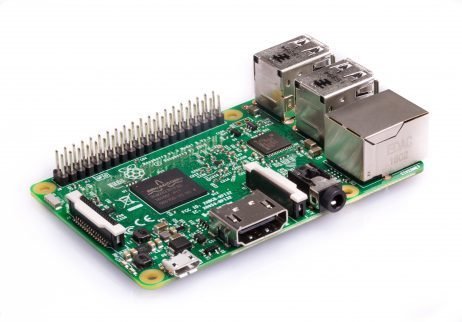
Raspberry Pi
Camera
Donkey Car

Tamiya RC car chassis
PWM
Servo Driver
Raspberry Pi
Camera
Raspberry Pi
3 board
Softwares



Features
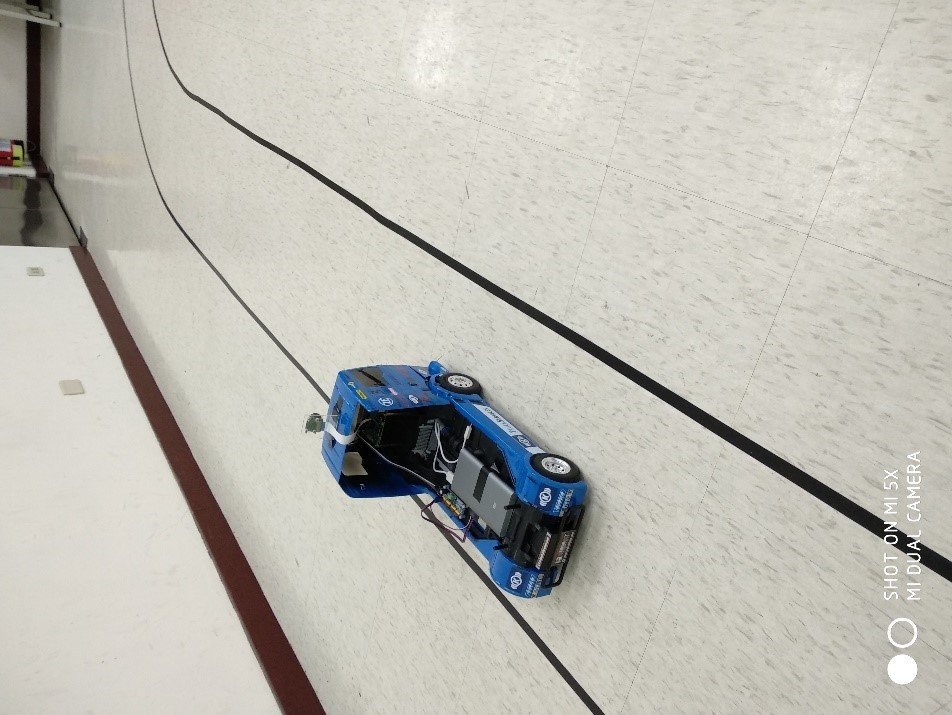
Follow in lane

Automatic follow car
Road sign detection


Traffic light and turn road sign detection
Obstruction detection

Voice Commands
Follow In Lane

Model Training
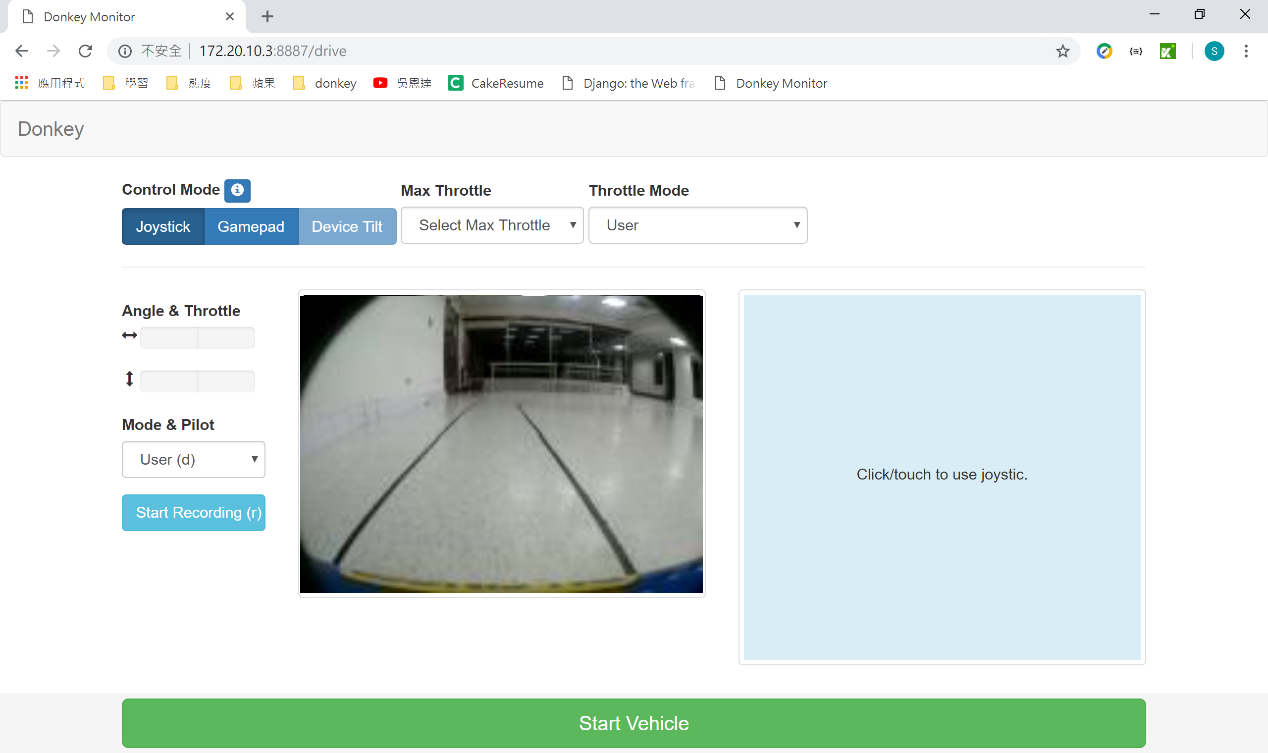
Data Collection
Test the Model to drive our Car

Step 1
Step 2
Step 3

Crate a model !
林建帆 / No. 16
Track Design
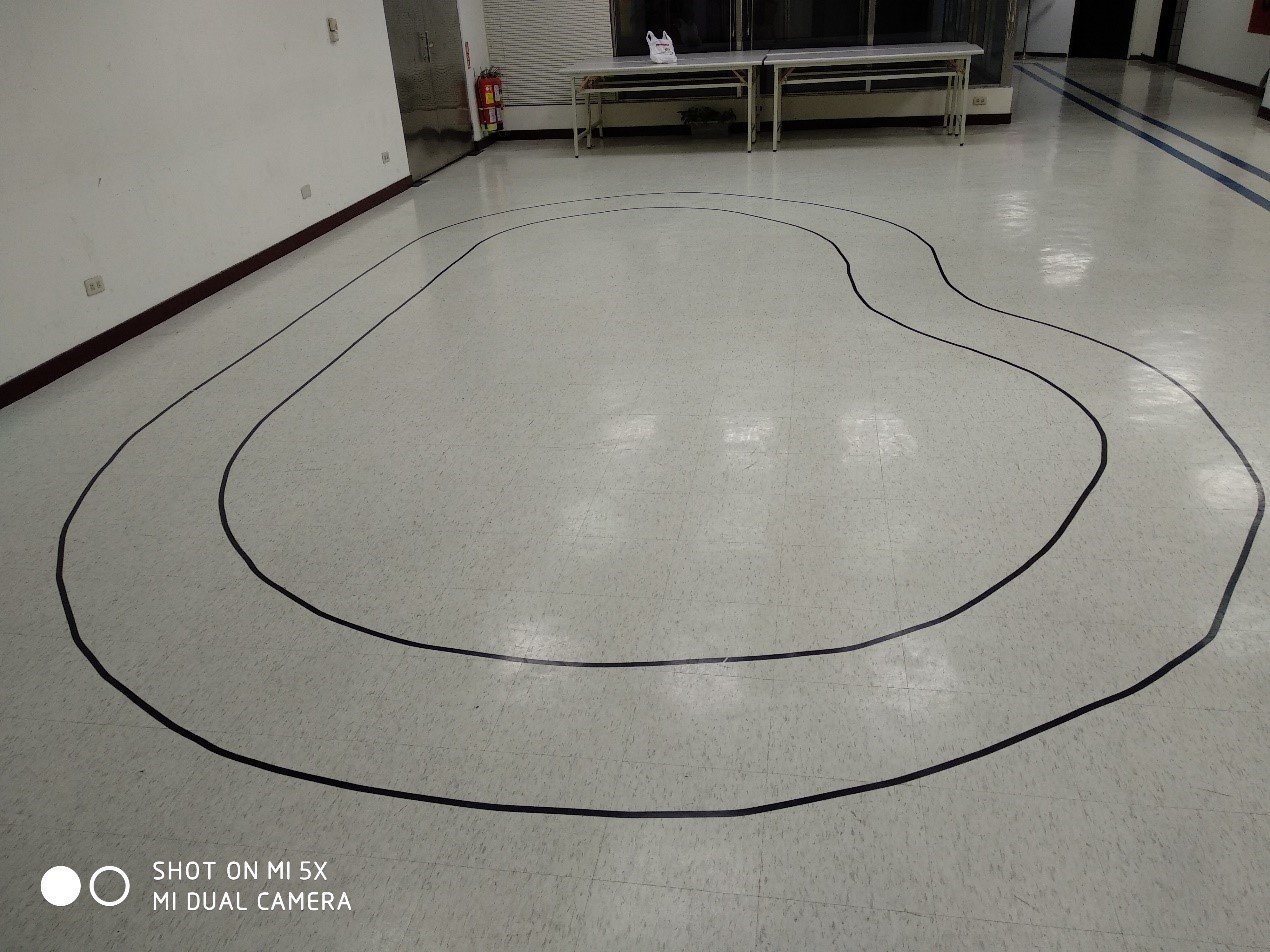

Training Track
Testing Track
Track Design
Noise
Track Lane


Noise
Track Lane

Track Lane
Without Noise
Without Noise
Improve track
Environment
Train a Model
Hi~I am
Model XXX
Data Collection

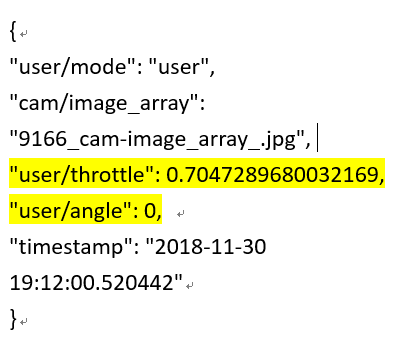
The Data Sets We Collect
Image file
JSON file
Record 10 data sets per second
The Neural Network
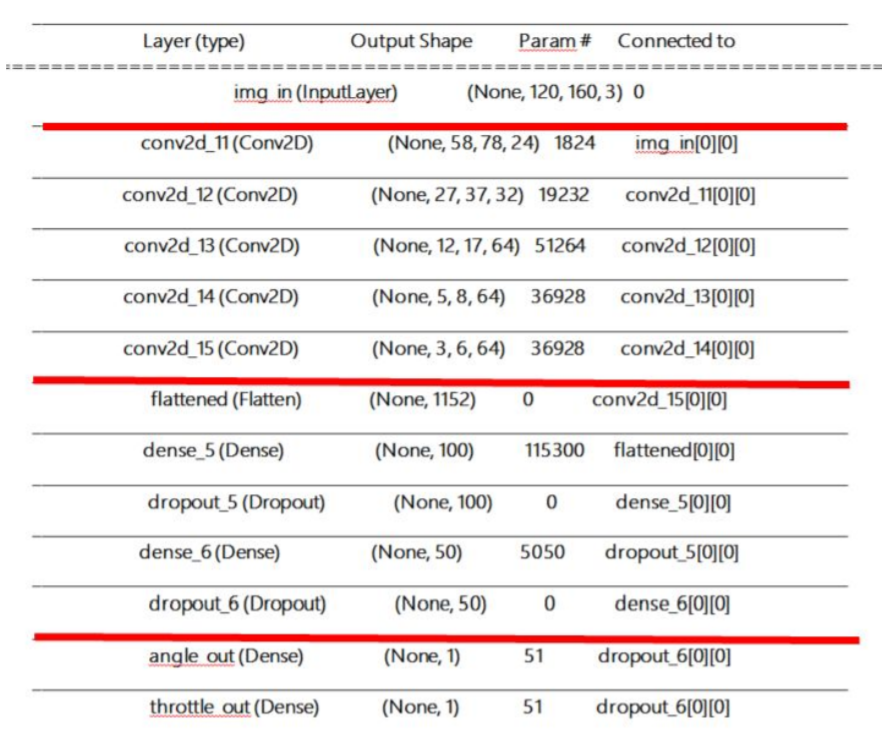
5 Layers CNN
Convolution
Model One Training



10,000 Data Sets
Total :
30,000
Data Sets



10,000 Data Sets
10,000 Data Sets
Model One Demo
Hi~I a.m..
M..od...el.. "P.ro..type.."
Model Two Training
10,000 20,000
Total :
60,000
Data Sets
10,000 20,000
10,000 20,000
Data Sets
Data Sets
Data Sets
Model Two Demo
Hi~I am
Model "Great"
Add OpenCV Function


Model Three Training
20,000 Data Sets
Total :
80,000
Data Sets
Plus 10,000 Data Sets !
Plus 10,000 Data Sets !
20,000 Data Sets
20,000 Data Sets
Model Three Demo
Hi~I am
Model "Genius"

Obstruction Detection
Training Steps
Allocate traffic cones


Drive clock / counter clock wise
Collected 60,000+ photos
Train model

Test model
Demo
Follow
follow the target
with direction
stop when recognize
specific object


{"user/angle": -0.7275541958055998, "user/throttle": 0.5386390125050264}
CNN
picamera
Demo
Traffic Light
Server
Raspberry Pi
photo

Socket
Traffic Light
Server
result
{RED}
Socket
Raspberry Pi
Demo
Left & Right Turn
Server
Raspberry Pi
{Right}

Socket
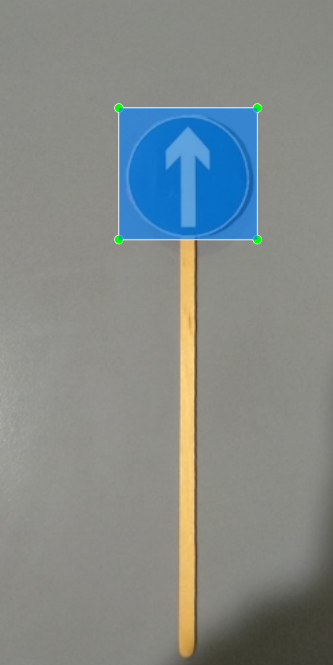
There are 250~300
labeling pictures
for each traffic sign
Demo
Road Sign Detection

Training step
2000+ pictures & 2000+ XML
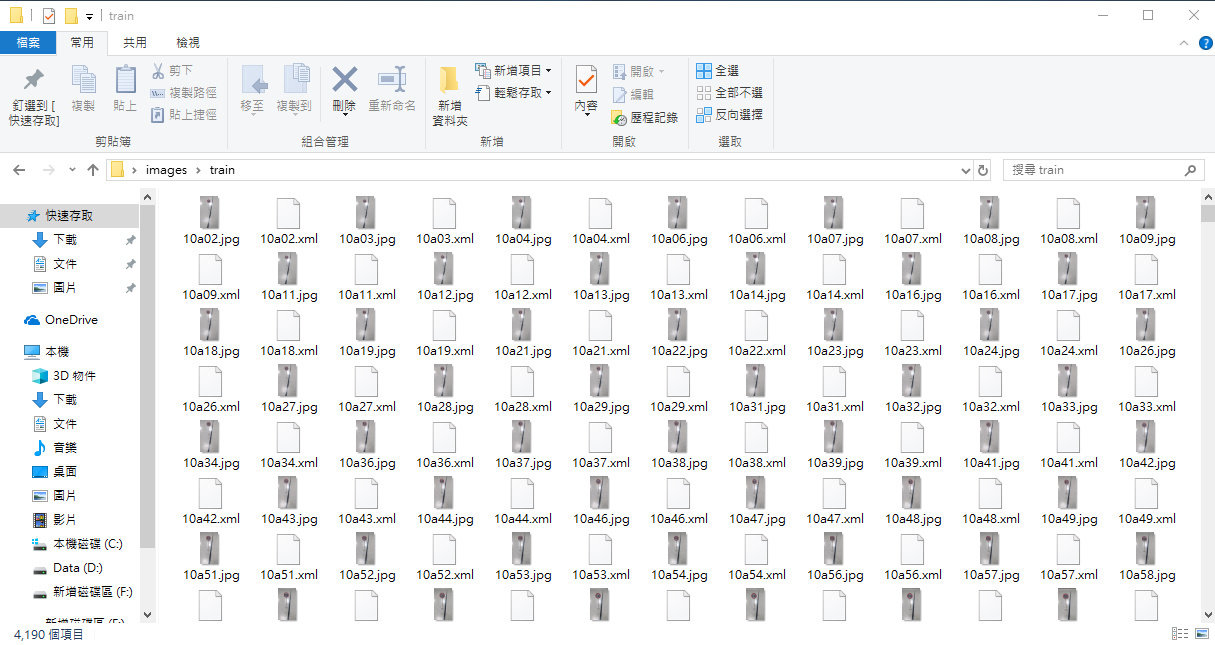
Training step
{straight}
(picture)
(XML)
Training step
80%:training
20%:testing



Yolo
Tensorflow


Tensorflow models zoo
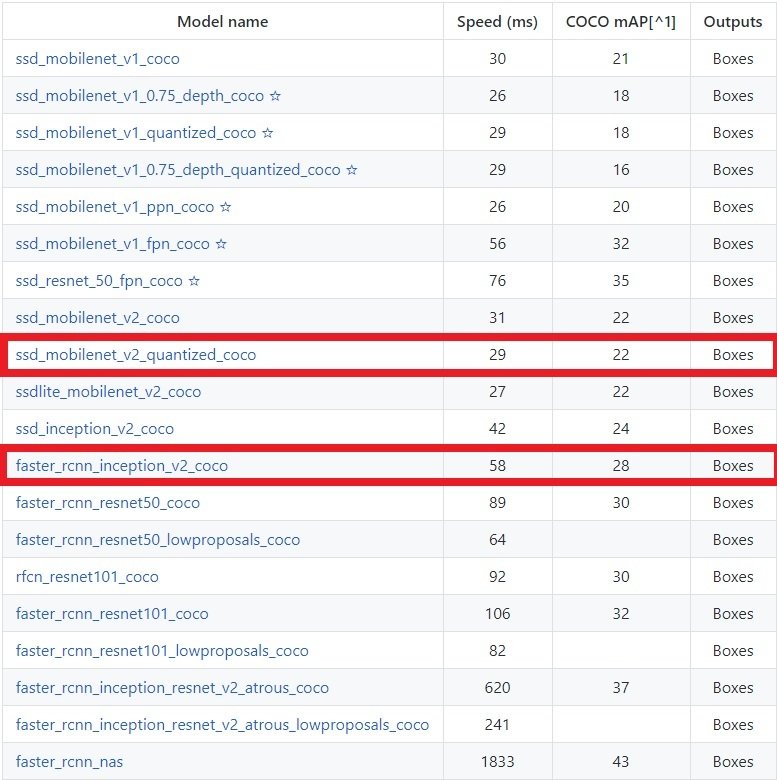
F-rcnn
mobilenet
Demo
Transition Period
Voice Commands

Google Web Speech API
Socket
Demo
Traffic Status Chatbot

What's Next?
- Integrate Robot Operating System (ROS)
- Replace Raspberry Pi with a more powerful computer
Thank You
ありがとうございました
謝謝