3D Gaussan Splatting
About me

- Is Mitya / Митя
- 3.5 years in ML
- 1.5 years in 3D reconstruction specifically
- I'm into:
- 3D Generative models
- 3D reconstruction tricks
- Computer Graphics stuff
- 3D modeling (sometimes)
- Math!
- Computer Vision in general
About today
- Prerequisites
- NeRF for dummies
- 3D Gaussian Splatting intro
- Rendering speed
- Practical notes & demo
- Dynamic reconstruction
- Comparison with NeRFs
What is: Triangular Mesh

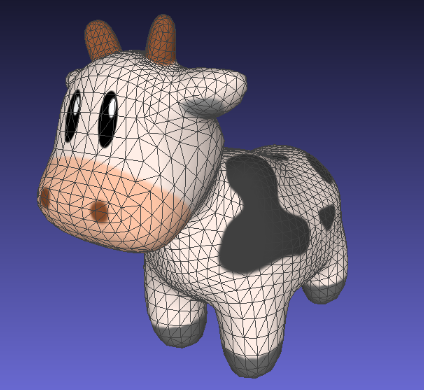
Any solid object can be represented as triangles
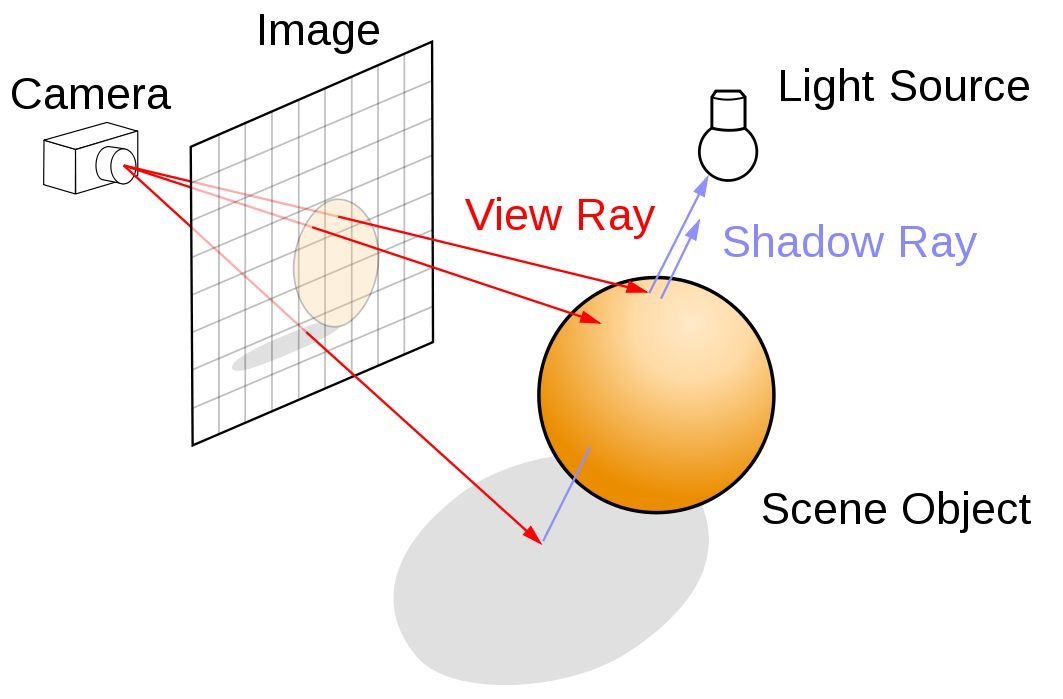
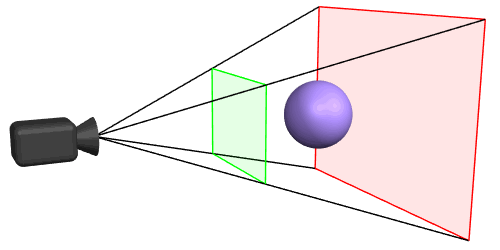
What is: Rendering
Two most used approaches
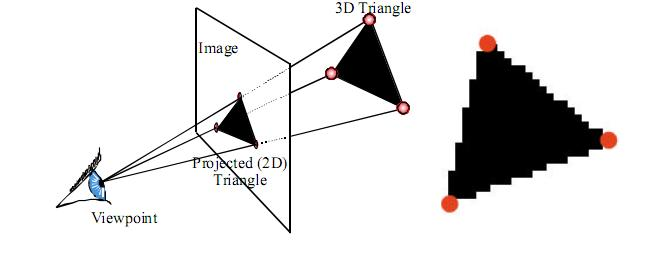
Rasterization
Projects object to screen space
Ray Tracing
Traces a ray through each pixel
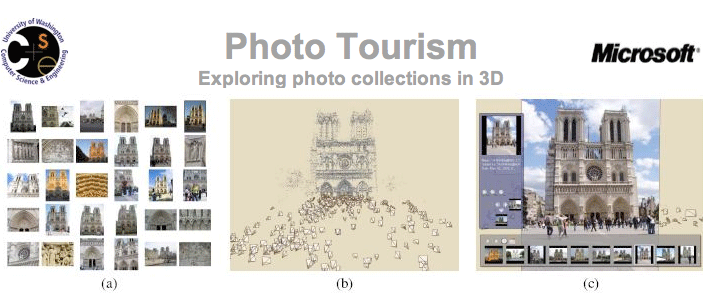
What is: Photogrammetry
Input: many-many photos of an object/scene
Output: point cloud of the object/scene
What is: Gaussian/Normal distribution
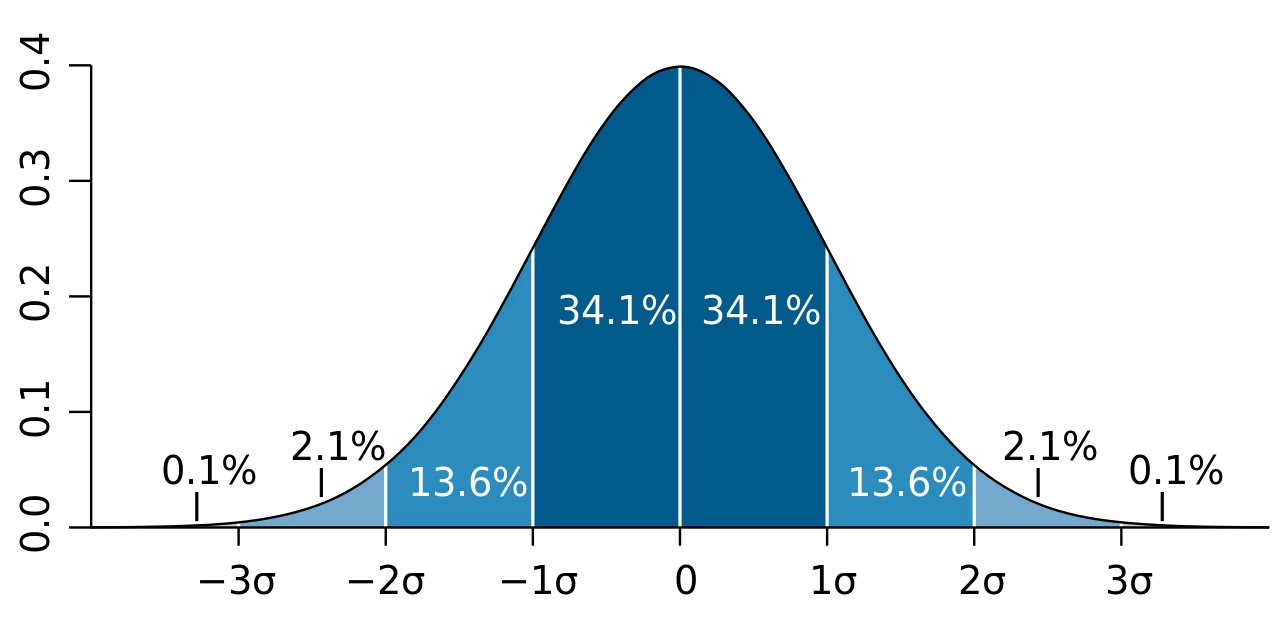
This function:
With nice properties
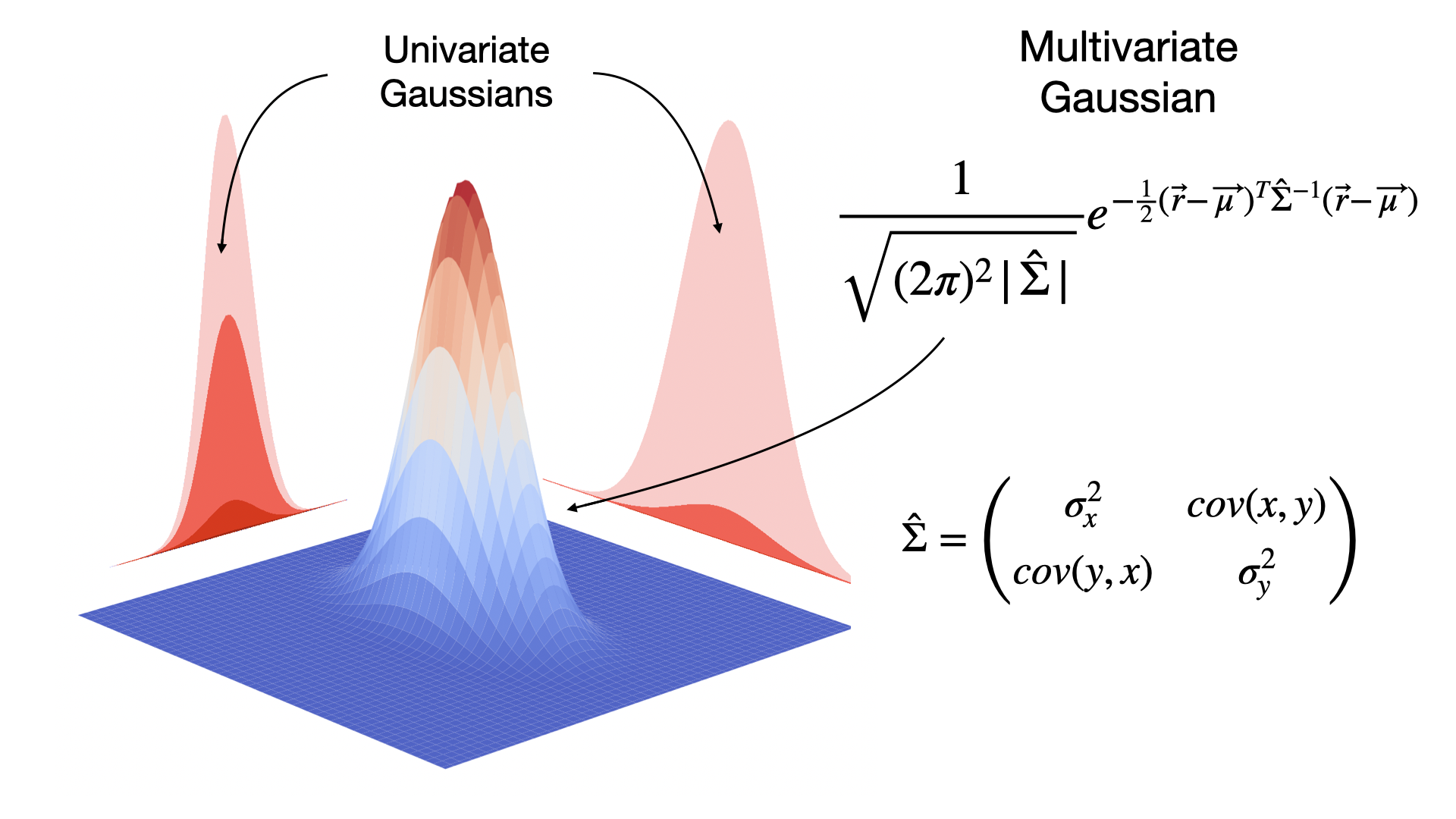
There is also a multivariate version
If we linearly project the distribution to a lower dimension, it will stay Gaussian
What is: Gradient Descent
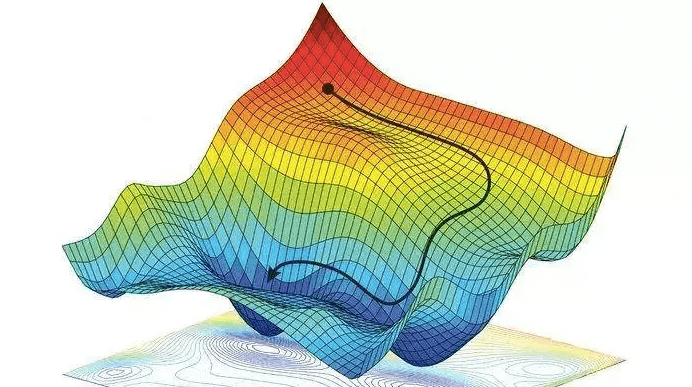
Gradient Descent optimizes the parameter of a function
Some function of 2 variables
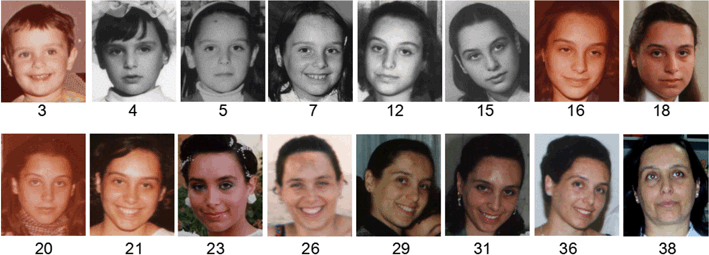
Example for Neural Networks
Dataset of pairs image:age
— Loss function
Optimization of the Neural Network
via Gradient Descent
We only need the gradient
What is: Differentiable Rendering
Our rendering is a function of:
- camera parameters
- the object
And what if our object is the output of an NN
And the loss is a function of the render
Camera paremeters
object
Chain rule:
is usually not available
but PyTorch3D (and some others) have it
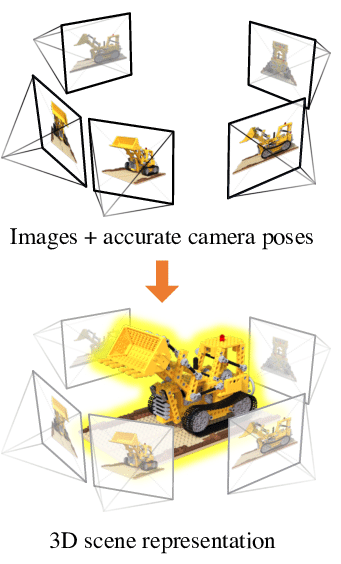
What is: Neural Radiance Fields (NeRF)

color = (1, 1, 1)
density = 0
color = (0.6, 0.4, 0.23)
density = 1
Any object can be described
with a function
In NeRF, this function is a NN
Ray direction is also passed because the color may depend on the point of view
the probability of a light particle passing through this point (segment)
What is: Neural Radiance Fields (NeRF)
camera ray
— probability of the ray passing through at point i
— probability of the ray reaching point i
— expected color of the ray r
That is how we render a ray
This is called Volume Rendering, we can render the whole image like this
And it's differentiable
Training a NeRF is optimizing
Loss function:
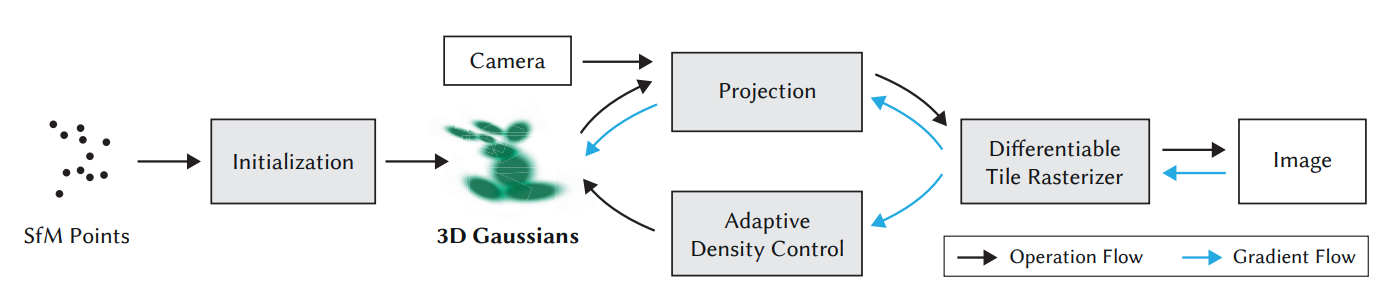
What is: 3D Gaussian Splatting
camera ray
— probability of the ray passing through at point i
— probability of the ray reaching point i
— expected color of the ray r
In NeRF we're using the NN to get density and color
What is: 3D Gaussian Splatting
camera ray
— probability of the ray reaching point i
— expected color of the ray r
In 3DGS we're using many colored 3D Gaussians
— probability of the ray passing through at point i
What is: 3D Gaussian Splatting
camera ray
expected color of the ray r
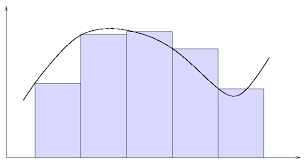
This is actually a numerical estimation done by sampling points along the ray
What is: 3D Gaussian Splatting
camera ray
expected color of the ray r
The true Volume Rendering formula
looks like this
What is: 3D Gaussian Splatting
camera ray
And due to nice Gaussian properties, it can be solved in close form!
How to render
camera ray
16x16 block
Image
- Split the image into 16x16 blocks
- For each block, allocate only Gaussians with 99% confidence intersection (culling)
- Load each block B into a separate GPU group and:
- Load allocated Gaussians
- Radix Sort in depth order
- Each pixel is computed in it's own thread:
Accumulate colors of Gaussians until 0.9999 probability of ray stopping
How to render
camera ray
16x16 block
Image
- Split the image into 16x16 blocks
- For each block, allocate only Gaussians with 99% confidence intersection (culling)
- Load each block B into a separate GPU group and:
- Load allocated Gaussians
- Radix Sort in depth order
- Each pixel is computed in it's own thread:
Accumulate colors of Gaussians until 0.9999 probability of ray stopping
Culling + iterating over objects is a property of Rasterization, not Volume Rendering
How to train
camera ray
During training, Gaussians with small opacity are removed
(With small opacity becomes useless)
Adaptive control:
camera ray
And Gaussians with large gradients are cloned
(Large gradients mean this area has a large loss, therefore we need more components)
How to train
camera ray
During training, Gaussians with small opacity are removed
(With small opacity becomes useless)
Adaptive control:
camera ray
And Gaussians with large gradients are cloned
(Large gradients mean this area has a large loss, therefore we need more components)
A good visualization
Practical notes

Tested 3DGS and NeRFStudio on 380 images of my cat (frames from a video)
A5000 GPU (rented a VPS)
3D Gaussian Splatting
NeRFStudio
- 11GB VRAM
- ~ 1 hour training
- Default viewer is a pain in the ass to get working
- 5GB VRAM
- ~ 80 minutes training
- Default viewer is great
Practical notes
Step-by-step tutorial for Windows
NeRFStudio Viewer plugin for 3D Gaussians!
https://github.com/yzslab/nerfstudio/tree/gaussian_splatting
Literally came out this week
Web viewer in the works
Practical notes
Step-by-step tutorial for Windows
NeRFStudio Viewer plugin for 3D Gaussians!
https://github.com/yzslab/nerfstudio/tree/gaussian_splatting
Literally came out this week
Web viewer in the works
DEMO
Dynamic Reconstruction
camera ray
Unlike NeRFs, all the Gaussians are individual objects we can move/rotate
Therefore animating them is a lot easier. And it can be used for reconstruction of moving scenes.
Dynamic Reconstruction algorithm:
- Reconstruct the first frame
- For each of the next frames:
- Initialize this frame's Gaussian parameters with the previous frame's
- Run optimization only on positions and rotations
Dynamic Reconstruction
camera ray
Unlike NeRFs, all the Gaussians are individual objects we can move/rotate
Therefore animating them is a lot easier. And it can be used for reconstruction of moving scenes.
Dynamic Reconstruction algorithm:
- Reconstruct the first frame
- For each of the next frames:
- Initialize this frame's Gaussian parameters with the previous frame's
- Run optimization only on positions and rotations
NeRF vs Gaussian Splatting
Previously state-of-the-art was this NeRF-based method
3DGS didn't beat it, but is pretty much equal in quality
+ Gaussian Splatting renders HD in real-time
+ Much easier to manipulate (animation / dynamic reconstruction)
- No conditional generation (EpiGRAF / NeRF in the wild)
- Meshes are worse than current NeRF methods (Neuralangelo)
- Can't dynamically reconstruct changing topologies (NeRFPlayer)
🎊
Thank you for coming!
Follow me on:
Twitter: https://twitter.com/Xallt_
Telegram: https://t.me/boring_dont_look
Github: https://github.com/Xallt