Safety and Efficiency for Autonomous Vehicles through Online Learning
Zachary Sunberg
Postdoctoral Scholar
University of California
How do we deploy autonomy with confidence?
Safety and Efficiency through Online Learning


Waymo Image By Dllu - Own work, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=64517567


Safety and efficiency through planning with drivers internal states
Pioneering online algorithm for POMDPs with continuous observation spaces
POMDP software with first-class speed and unprecedented flexibility


Driving
POMCPOW
POMDPs.jl
POMDPs
UAV Collision Avoidance
Space Situational Awareness
Dual Control

Autorotation
Successful flight test of automatic controller

Future
Autorotation
Driving
POMDPs
POMCPOW
POMDPs.jl
Future
Autorotation

"Expert System" Autorotation Controller

Example Controller: Flare
\[\alpha \equiv \frac{KE_{\text{available}} - KE_{\text{flare exit}}}{KE_{\text{flare entry}} - KE_{\text{flare exit}}}\]
\[TTLE = TTLE_{max} \times \alpha\]
\[\ddot{h}_{des} = -\frac{2}{TTI_F^2}h - \frac{2}{TTI_F}\dot{h}\]
[Sunberg, 2015]

Autorotation Simulation Results
[Sunberg, 2015]
Flight Tests

[Sunberg, 2015]
"Expert System" Autorotation Controller
Example Controller: Flare
\[\alpha \equiv \frac{KE_{\text{available}} - KE_{\text{flare exit}}}{KE_{\text{flare entry}} - KE_{\text{flare exit}}}\]
\[TTLE = TTLE_{max} \times \alpha\]
\[\ddot{h}_{des} = -\frac{2}{TTI_F^2}h - \frac{2}{TTI_F}\dot{h}\]
Problems with this approach:
- No optimality justification
- Controller must be adjusted by hand to accommodate any changes
- Difficult to communicate about
- Parameters not intuitive
[Sunberg, 2015]
Autorotation
Driving
POMDPs
POMCPOW
POMDPs.jl
Future
Tweet by Nitin Gupta
29 April 2018
https://twitter.com/nitguptaa/status/990683818825736192
Two Objectives for Autonomy
EFFICIENCY
SAFETY
Minimize resource use
(especially time)
Minimize the risk of harm to oneself and others


Safety often opposes Efficiency
Pareto Optimization
Safety
Better Performance
Model \(M_2\), Algorithm \(A_2\)
Model \(M_1\), Algorithm \(A_1\)
Efficiency
$$\underset{\pi}{\mathop{\text{maximize}}} \, V^\pi = V^\pi_\text{E} + \lambda V^\pi_\text{S}$$
Safety
Weight
Efficiency

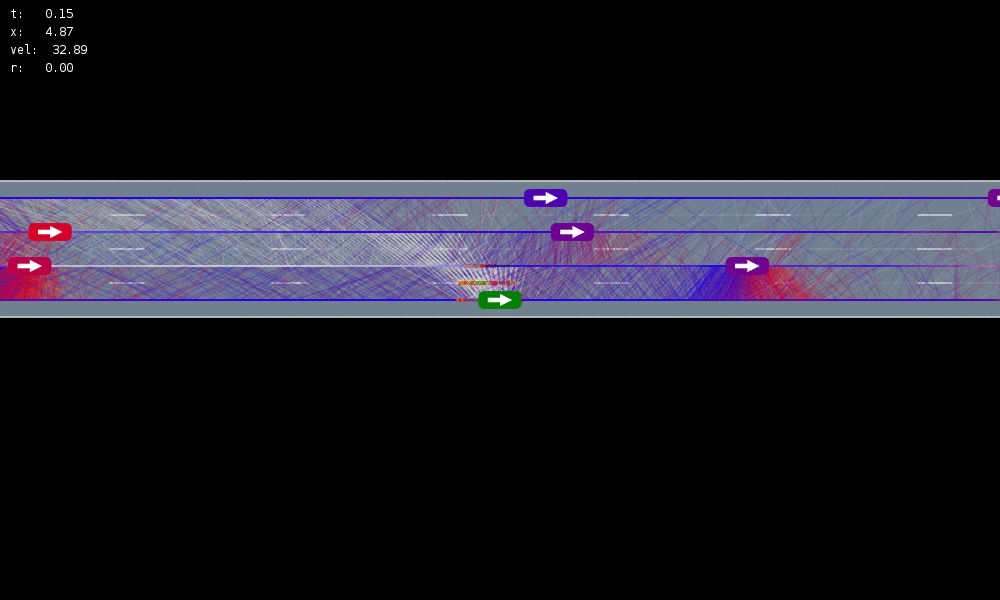
Intelligent Driver Model (IDM)
\ddot{x}_\text{IDM} = a \left[ 1 - \left( \frac{\dot{x}}{\dot{x}_0} \right)^{\delta} - \left(\frac{g^*(\dot{x}, \Delta \dot{x})}{g}\right)^2 \right]
g^*(\dot{x}, \Delta \dot{x}) = g_0 + T \dot{x} + \frac{\dot{x}\Delta \dot{x}}{2 \sqrt{a b}}

[Treiber, et al., 2000] [Kesting, et al., 2007] [Kesting, et al., 2009]
Internal States
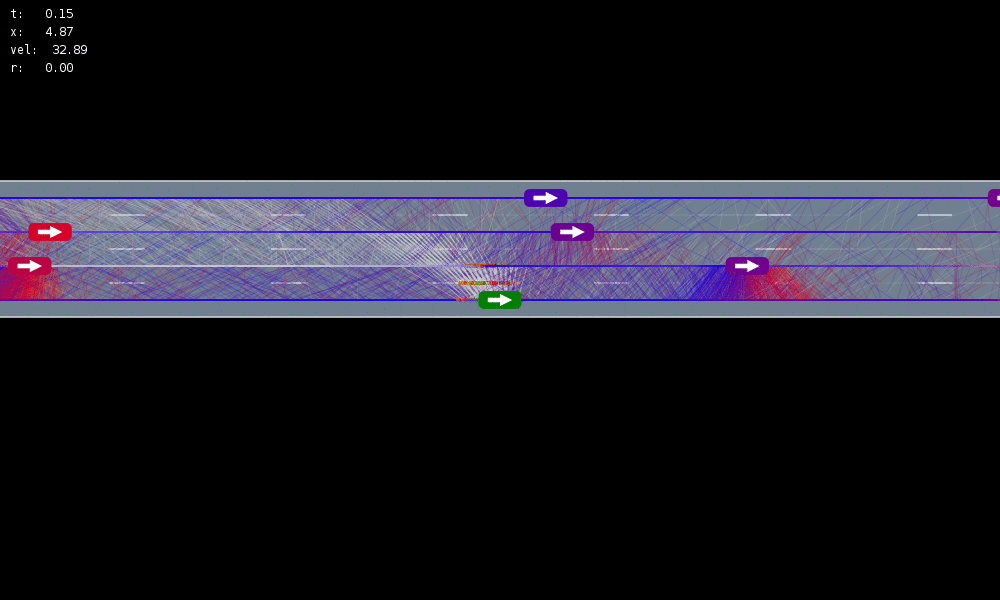






All drivers normal



No learning (MDP)
Omniscient
POMCPOW (Ours)
Simulation results
[Sunberg, 2017]



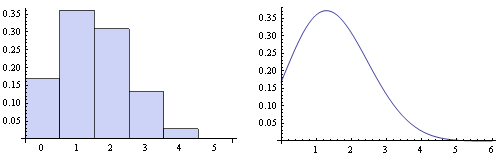
Marginal Distribution: Uniform
\(\rho=0\)
\(\rho=1\)
\(\rho=0.75\)
Internal parameter distributions
Conditional Distribution: Copula
Assume normal


No Learning (MDP)
Omniscient
Mean MPC
QMDP
POMCPOW (Ours)






[Sunberg, 2017]
Autorotation
Driving
POMDPs
POMCPOW
POMDPs.jl
Future
Types of Uncertainty
OUTCOME
MODEL
STATE




Markov Model
- \(\mathcal{S}\) - State space
- \(T:\mathcal{S}\times\mathcal{S} \to \mathbb{R}\) - Transition probability distributions
Markov Decision Process (MDP)
- \(\mathcal{S}\) - State space
- \(T:\mathcal{S}\times \mathcal{A} \times\mathcal{S} \to \mathbb{R}\) - Transition probability distribution
- \(\mathcal{A}\) - Action space
- \(R:\mathcal{S}\times \mathcal{A} \to \mathbb{R}\) - Reward

Solving MDPs - The Value Function
$$V^*(s) = \underset{a\in\mathcal{A}}{\max} \left\{R(s, a) + \gamma E\Big[V^*\left(s_{t+1}\right) \mid s_t=s, a_t=a\Big]\right\}$$
Involves all future time
Involves only \(t\) and \(t+1\)
$$\underset{\pi:\, \mathcal{S}\to\mathcal{A}}{\mathop{\text{maximize}}} \, V^\pi(s) = E\left[\sum_{t=0}^{\infty} \gamma^t R(s_t, \pi(s_t)) \bigm| s_0 = s \right]$$
$$Q(s,a) = R(s, a) + \gamma E\Big[V^* (s_{t+1}) \mid s_t = s, a_t=a\Big]$$
Value = expected sum of future rewards
Online Decision Process Tree Approaches

Time
Estimate \(Q(s, a)\) based on children
$$Q(s,a) = R(s, a) + \gamma E\Big[V^* (s_{t+1}) \mid s_t = s, a_t=a\Big]$$
\[V(s) = \max_a Q(s,a)\]
Partially Observable Markov Decision Process (POMDP)

- \(\mathcal{S}\) - State space
- \(T:\mathcal{S}\times \mathcal{A} \times\mathcal{S} \to \mathbb{R}\) - Transition probability distribution
- \(\mathcal{A}\) - Action space
- \(R:\mathcal{S}\times \mathcal{A} \to \mathbb{R}\) - Reward
- \(\mathcal{O}\) - Observation space
- \(Z:\mathcal{S} \times \mathcal{A}\times \mathcal{S} \times \mathcal{O} \to \mathbb{R}\) - Observation probability distribution
\begin{aligned}
& \mathcal{S} = \mathbb{Z} \quad \quad \quad ~~ \mathcal{O} = \mathbb{R} \\
& s' = s+a \quad \quad o \sim \mathcal{N}(s, s-10) \\
& \mathcal{A} = \{-10, -1, 0, 1, 10\} \\
& R(s, a) = \begin{cases}
100 & \text{ if } a = 0, s = 0 \\
-100 & \text{ if } a = 0, s \neq 0 \\
-1 & \text{ otherwise}
\end{cases} & \\
\end{aligned}

State
Timestep
Accurate Observations
Goal: \(a=0\) at \(s=0\)
Optimal Policy
Localize
\(a=0\)
POMDP Example: Light-Dark
POMDP Sense-Plan-Act Loop
Environment
Belief Updater
Policy
\(b\)
\(a\)
\[b_t(s) = P\left(s_t = s \mid a_1, o_1 \ldots a_{t-1}, o_{t-1}\right)\]

True State
\(s = 7\)
Observation \(o = -0.21\)
Environment
Belief Updater
Policy
\(a\)
\(b = \mathcal{N}(\hat{s}, \Sigma)\)
True State
\(s \in \mathbb{R}^n\)
Observation \(o \sim \mathcal{N}(C s, V)\)
LQG Problem (a simple POMDP)
\(s_{t+1} \sim \mathcal{N}(A s_t + B a_t, W)\)
\(\pi(b) = K \hat{s}\)
Kalman Filter
\(R(s, a) = - s^T Q s - a^T R a\)
Real World POMDPs



1) ACAS
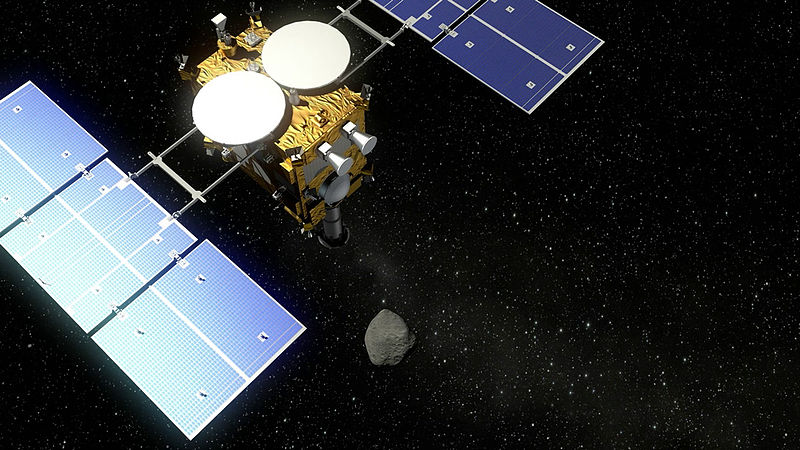
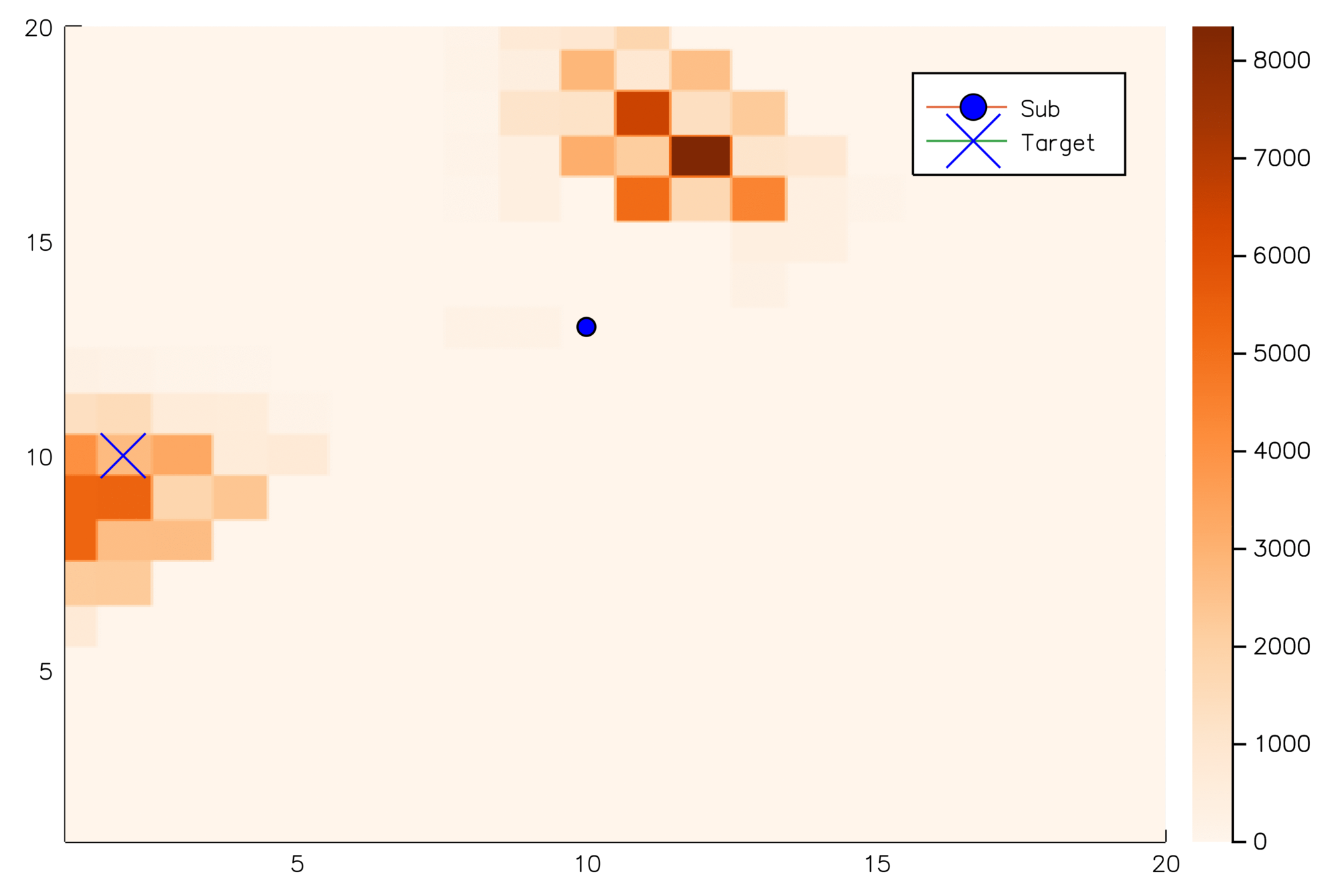
2) Orbital Object Tracking
4) Medical
3) Dual Control
ACAS X
Trusted UAV
Collision Avoidance
[Sunberg, 2016]
[Kochenderfer, 2011]
Real World POMDPs
\(\mathcal{S}\): Information space for all objects
\(\mathcal{A}\): Which objects to measure
\(R\): - Entropy
Approximately 20,000 objects >10cm in orbit
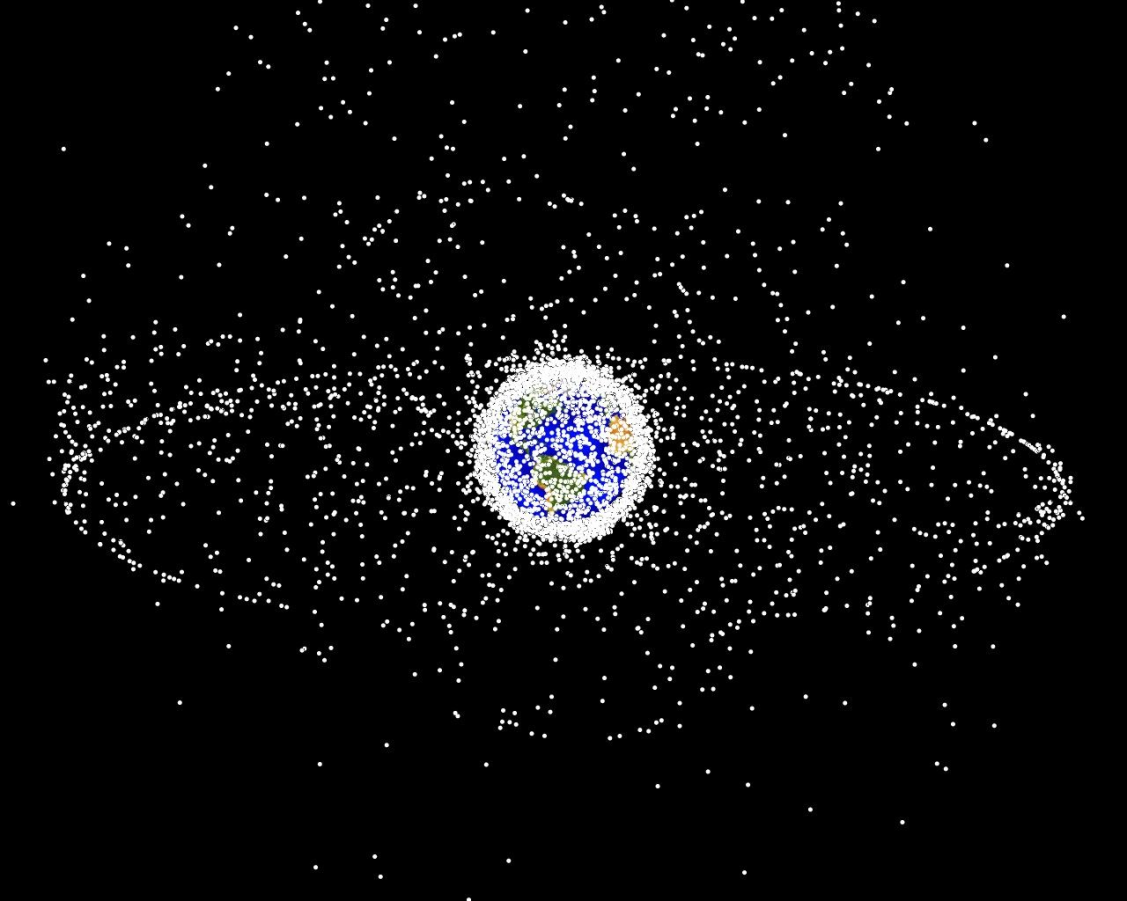
[Sunberg, 2016]
1) ACAS
2) Orbital Object Tracking
4) Medical
3) Dual Control
Real World POMDPs


State \(x\) Parameters \(\theta\)
\(s = (x, \theta)\) \(o = x + v\)
POMDP solution automatically balances exploration and exploitation
[Slade, Sunberg, et al. 2017]
1) ACAS
2) Orbital Object Tracking
4) Medical
3) Dual Control
Real World POMDPs
1) ACAS
2) Orbital Object Tracking
4) Medical
3) Dual Control
[Ayer 2012]

[Sun 2014]
Personalized Cancer Screening
Steerable Needle Guidance
Autorotation
Driving
POMDPs
POMCPOW
POMDPs.jl
Future
POMDP Sense-Plan-Act Loop
Environment
Belief Updater
Policy

\(o\)
\(b\)
\(a\)
- A POMDP is an MDP on the Belief Space but belief updates are expensive
- POMCP* uses simulations of histories instead of full belief updates
- Each belief is implicitly represented by a collection of unweighted particles

[Ross, 2008] [Silver, 2010]
*(Partially Observable Monte Carlo Planning)
[ ] An infinite number of child nodes must be visited
[ ] Each node must be visited an infinite number of times
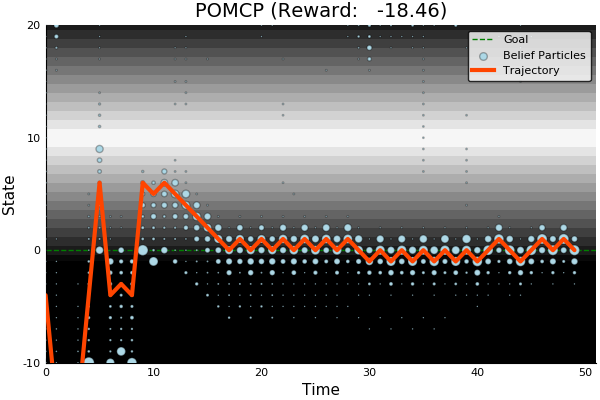
Solving continuous POMDPs - POMCP fails

POMCP
✔
✔
Double Progressive Widening (DPW): Gradually grow the tree by limiting the number of children to \(k N^\alpha\)
Necessary Conditions for Consistency
[Coutoux, 2011]

POMCP
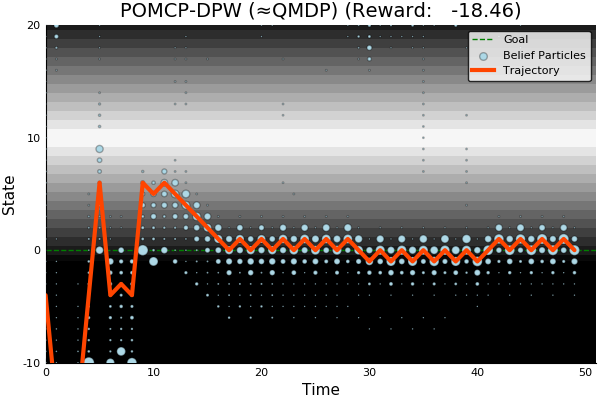
POMCP-DPW
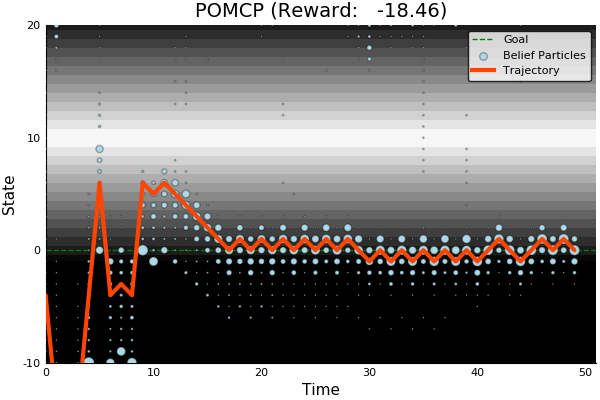

[Sunberg, 2018]
POMDP Solution
QMDP


\[\underset{\pi: \mathcal{B} \to \mathcal{A}}{\mathop{\text{maximize}}} \, V^\pi(b)\]
\[\underset{a \in \mathcal{A}}{\mathop{\text{maximize}}} \, \underset{s \sim{} b}{E}\Big[Q_{MDP}(s, a)\Big]\]
Same as full observability on the next step
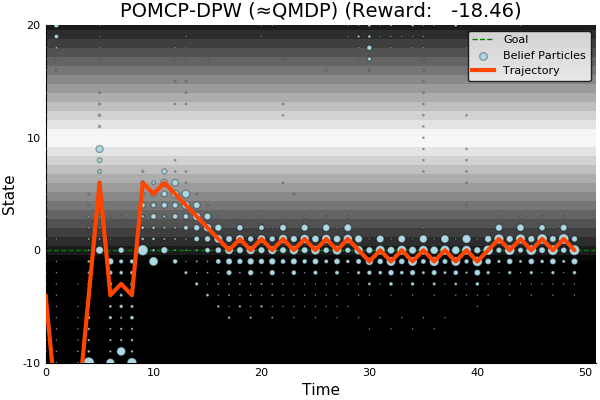
POMCP-DPW converges to QMDP
Proof Outline:
-
Observation space is continuous with finite density → w.p. 1, no two trajectories have matching observations
-
(1) → One state particle in each belief, so each belief is merely an alias for that state
-
(2) → POMCP-DPW = MCTS-DPW applied to fully observable MDP + root belief state
-
Solving this MDP is equivalent to finding the QMDP solution → POMCP-DPW converges to QMDP



[Sunberg, 2018]

POMCP-DPW
[ ] An infinite number of child nodes must be visited
[ ] Each node must be visited an infinite number of times
[ ] An infinite number of particles must be added to each belief node
✔
✔
Necessary Conditions for Consistency
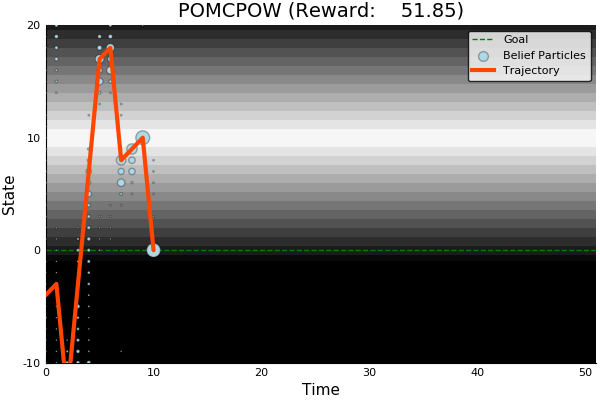
Use \(Z\) to insert weighted particles
✔
[Sunberg, 2018]

POMCP
POMCP-DPW
POMCPOW
[Sunberg, 2018]

Ours
Suboptimal
State of the Art
Discretized
[Ye, 2017] [Sunberg, 2018]


[Sunberg, 2018]
Ours
Suboptimal
State of the Art
Discretized


[Sunberg, 2018]
Ours
Suboptimal
State of the Art
Discretized

[Sunberg, 2018]
Ours
Suboptimal
State of the Art
Discretized

[Sunberg, 2018]
Ours
Suboptimal
State of the Art
Discretized

[Sunberg, 2018]

Next Step: Planning on Weighted Scenarios

Autorotation
Driving
POMDPs
POMCPOW
POMDPs.jl
Future
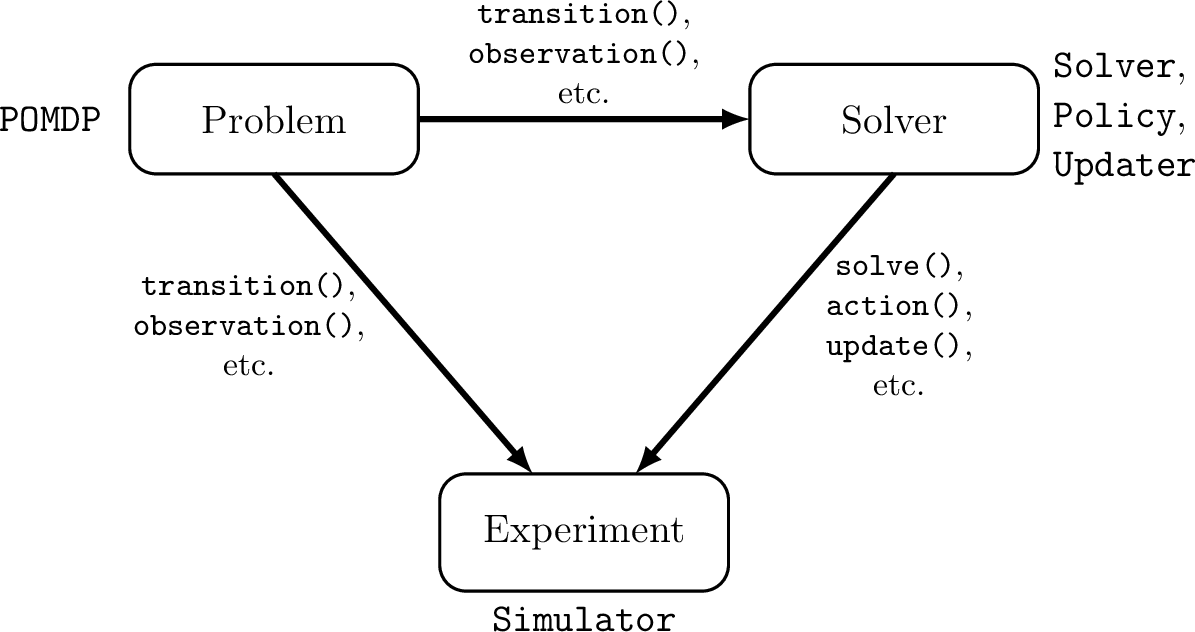
POMDPs.jl - An interface for defining and solving MDPs and POMDPs in Julia
[Egorov, Sunberg, et al., 2017]
Challenges for POMDP Software
- POMDPs are computationally difficult.
Julia - Speed

Celeste Project
1.54 Petaflops

Challenges for POMDP Software
- POMDPs are computationally difficult.
- There is a huge variety of
- Problems
- Continuous/Discrete
- Fully/Partially Observable
- Generative/Explicit
- Simple/Complex
- Solvers
- Online/Offline
- Alpha Vector/Graph/Tree
- Exact/Approximate
- Domain-specific heuristics
- Problems
Explicit
Black Box
("Generative" in POMDP lit.)
\(s,a\)
\(s', o, r\)
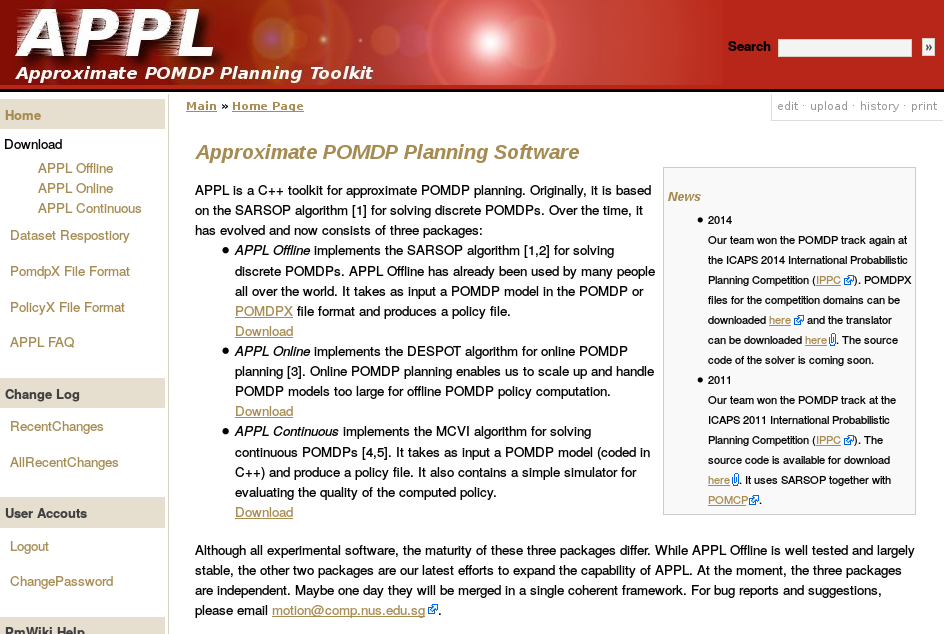
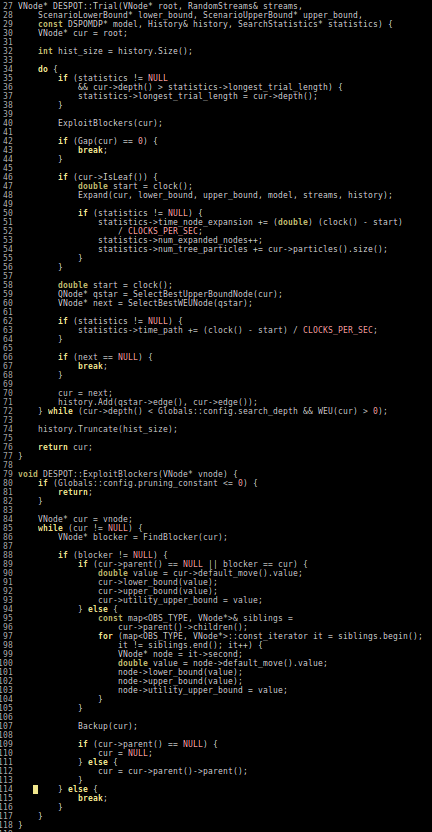
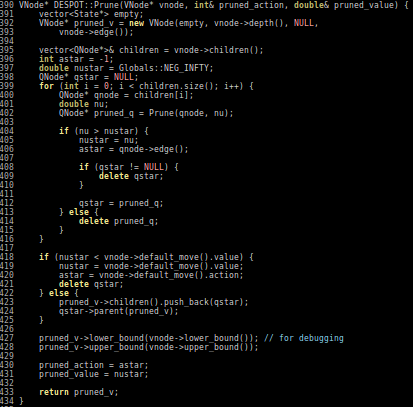
Previous C++ framework: APPL
"At the moment, the three packages are independent. Maybe one day they will be merged in a single coherent framework."
[Egorov, Sunberg, et al., 2017]



Autorotation
Driving
POMDPs
POMCPOW
POMDPs.jl
Future
Future Research
Deploying autonomous agents with confidence
Practical Safety Gaurantees
Trusting Visual Sensors
Algorithms for Physical Problems
Physical Vehicles




Trusting Information from Visual Sensors

Environment

Belief State
Convolutional Neural Network
Control System
Architecture for Safety Assurance
Algorithms for the Physical World
1. Continuous multi-dimensional action spaces
2. Data-driven models on modern parallel hardware


CPU Image By Eric Gaba, Wikimedia Commons user Sting, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=68125990



3. Better algorithms for existing POMDPs
- Health screening
- Human-robot interaction
Practical Safety Guarantees


- Reachability-based guarantees are usually infeasible
- Probabilistic guarantees involve low-probability distribution tails
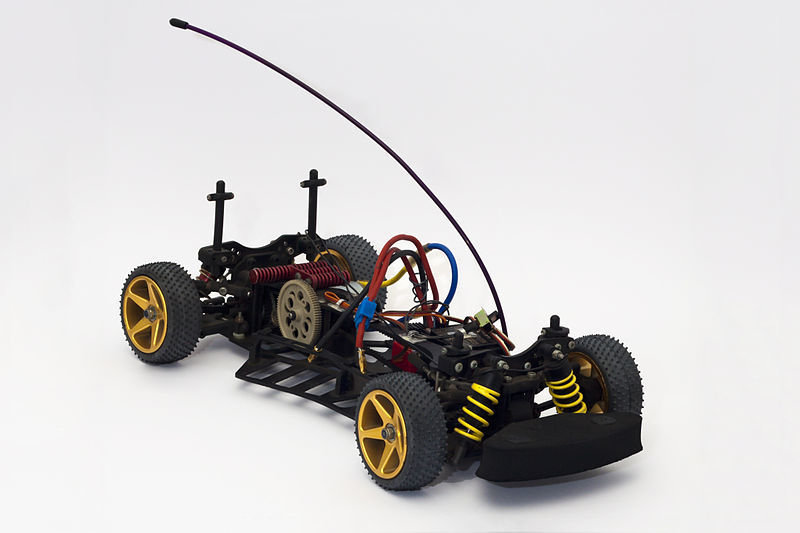
Physical Vehicles in the Real World
Texas A&M (HUSL)
RC Car with assured visual sensing
Optimized Autorotation

Active Sensing

New Course: Decision Making Under Uncertainty
Project-Centric
1. Intro to Probabilistic Models
2. Markov Decision Processes
3. Reinforcement Learning
4. POMDPs
(More focus on online POMDP solutions than Stanford course)
Acknowledgements
The content of my research reflects my opinions and conclusions, and is not necessarily endorsed by my funding organizations.













Thank You!

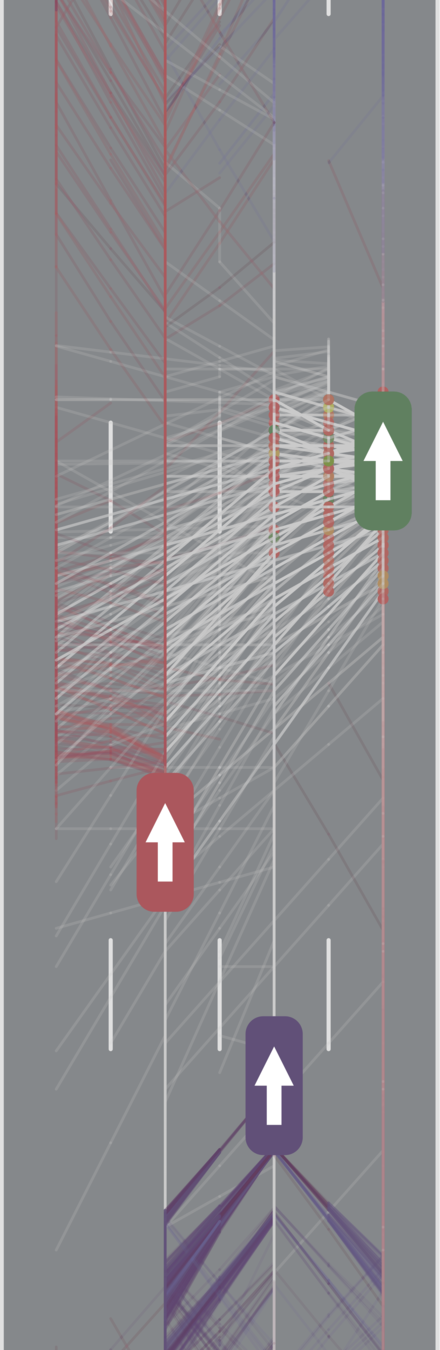
POMDP Formulation
\(s=\left(x, y, \dot{x}, \left\{(x_c,y_c,\dot{x}_c,l_c,\theta_c)\right\}_{c=1}^{n}\right)\)
\(o=\left\{(x_c,y_c,\dot{x}_c,l_c)\right\}_{c=1}^{n}\)
\(a = (\ddot{x}, \dot{y})\), \(\ddot{x} \in \{0, \pm 1 \text{ m/s}^2\}\), \(\dot{y} \in \{0, \pm 0.67 \text{ m/s}\}\)

Ego physical state
Physical states of other cars
Internal states of other cars
Physical states of other cars

- Actions filtered so they can never cause crashes
- Braking action always available
Efficiency
Safety
$$R(s, a, s') = \text{in\_goal}(s') - \lambda \left(\text{any\_hard\_brakes}(s, s') + \text{any\_too\_slow}(s')\right)$$
POMDPs in Aerospace
\(s=\left(x, y, \dot{x}, \left\{(x_c,y_c,\dot{x}_c,l_c,\theta_c)\right\}_{c=1}^{n}\right)\)
\(o=\left\{(x_c,y_c,\dot{x}_c,l_c)\right\}_{c=1}^{n}\)
\(a = (\ddot{x}, \dot{y})\)
Ego physical state
Physical states of other cars
Internal states of other cars
Physical states
Efficiency
Safety
\( - \lambda \left(\text{any\_hard\_brakes}(s, s') + \text{any\_too\_slow}(s')\right)\)
\(R(s, a, s') = \text{in\_goal}(s')\)
[Sunberg, 2017]
"[The autonomous vehicle] performed perfectly, except when it had to merge onto I-395 South and swing across three lanes of traffic"
- Bloomberg
http://bloom.bg/1Qw8fjB

Monte Carlo Tree Search
Image by Dicksonlaw583 (CC 4.0)
Autorotation
Driving
POMDPs
POMCPOW
POMDPs.jl
Future
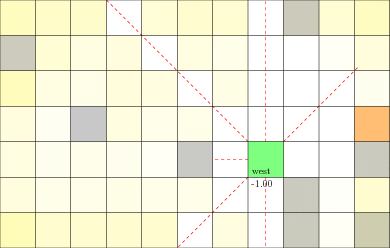
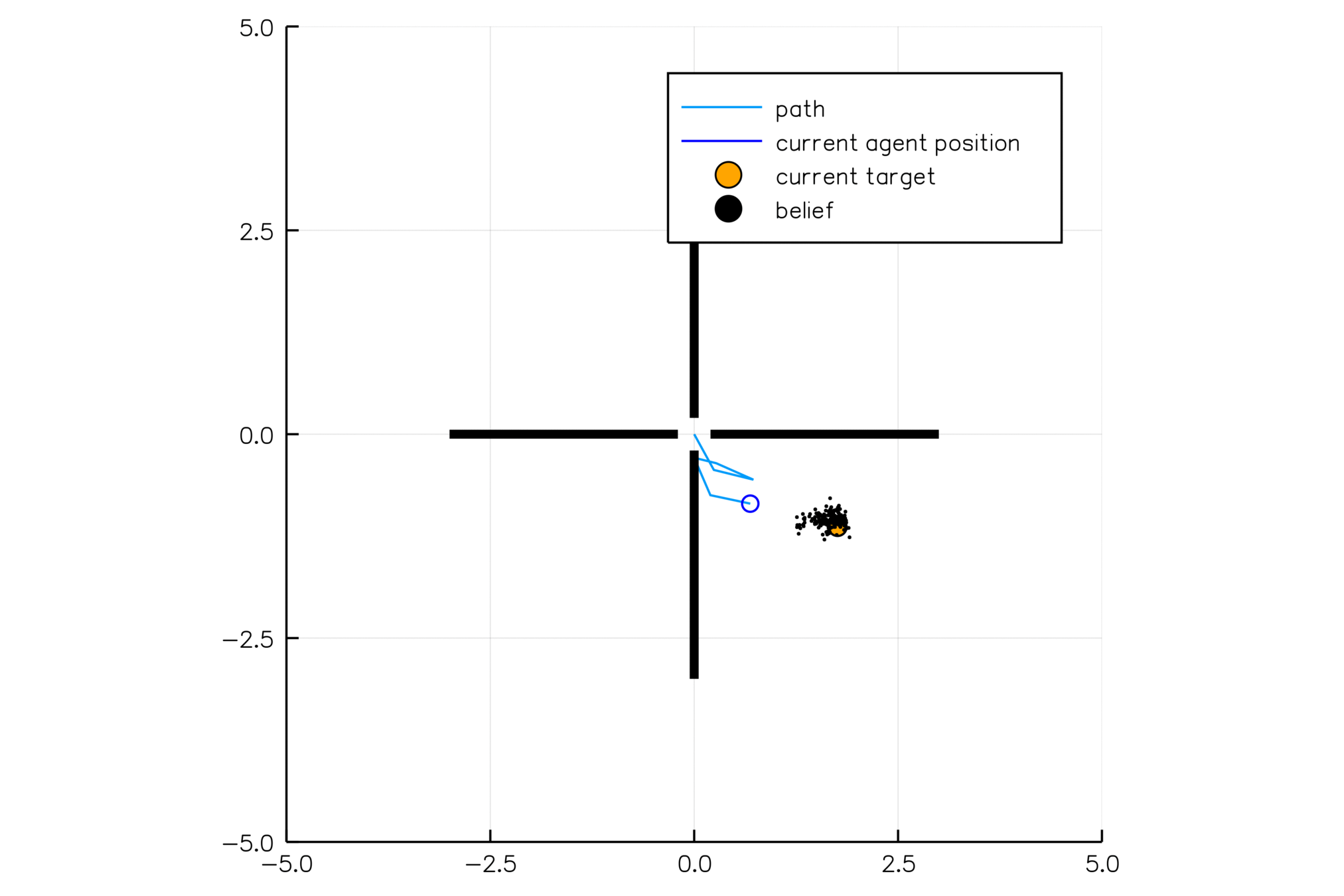
POMDP Example: Laser Tag

POMDP Sense-Plan-Act Loop
Environment
Belief Updater
Policy



\(o\)
\(b\)
\(a\)
\[b_t(s) = P\left(s_t = s \mid a_1, o_1 \ldots a_{t-1}, o_{t-1}\right)\]
Laser Tag POMDP
Online Decision Process Tree Approaches
State Node
Action Node
(Estimate \(Q(s,a)\) here)
WSU Job Talk
By Zachary Sunberg



