Lecture 7: Neural Networks II, Auto-encoders
Shen Shen
October 11, 2024
Intro to Machine Learning
(slides adapted from Phillip Isola)
Outline
- Recap, neural networks mechanism
- Neural networks are representation learners
- Auto-encoder:
- Bottleneck
- Reconstruction
- Unsupervised learning
- (Some recent representation learning ideas)
linear combination
nonlinear activation
\(\dots\)
Forward pass: evaluate, given the current parameters,
- the model output \(g^{(i)}\) =
- the loss incurred on the current data \(\mathcal{L}(g^{(i)}, y^{(i)})\)
- the training error \(J = \frac{1}{n} \sum_{i=1}^{n}\mathcal{L}(g^{(i)}, y^{(i)})\)
loss function
Recap:
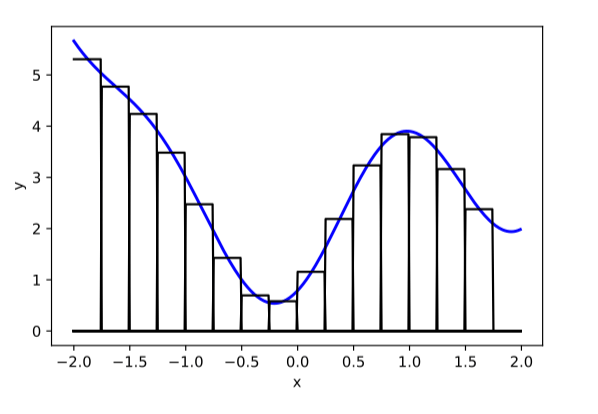
compositions of ReLU(s) can be quite expressive

in fact, asymptotically, can approximate any function!
(image credit: Phillip Isola)
some weighted sum
Recap:
- Randomly pick a data point \((x^{(i)}, y^{(i)})\)
- Evaluate the gradient \(\nabla_{W^2} \mathcal{L(g^{(i)},y^{(i)})}\)
- Update the weights \(W^2 \leftarrow W^2 - \eta \nabla_{W^2} \mathcal{L(g^{(i)},y^{(i)}})\)
\(\dots\)
Backward pass: run SGD to update the parameters, e.g. to update \(W^2\)

\(\nabla_{W^2} \mathcal{L(g^{(i)},y^{(i)})}\)
Recap:
\(\dots\)
Recap:
back propagation: reuse of computation
\(\dots\)
back propagation: reuse of computation
Recap:
Outline
- Recap, neural networks mechanism
- Neural networks are representation learners
- Auto-encoder:
- Bottleneck
- Reconstruction
- Unsupervised learning
- (Some recent representation learning ideas)
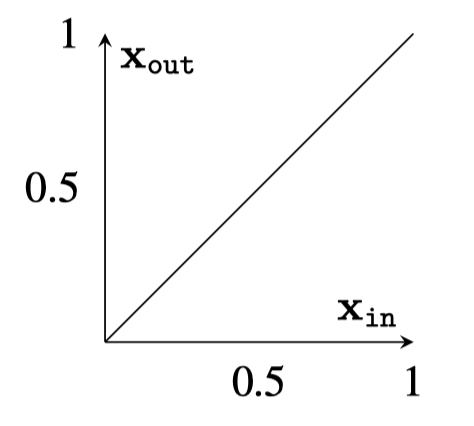
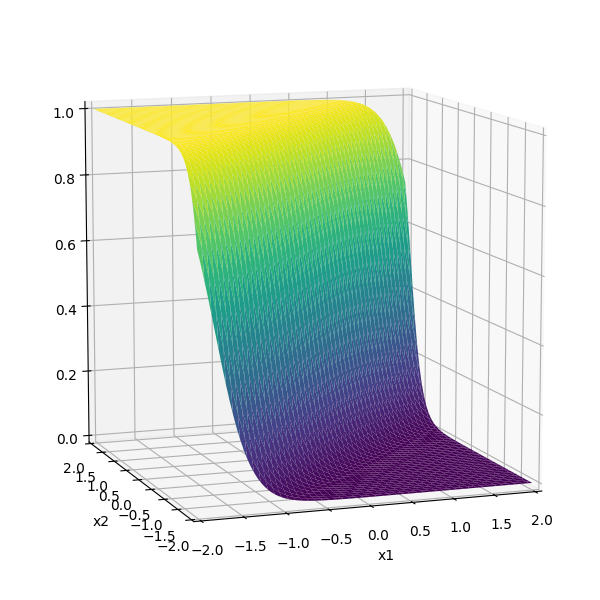
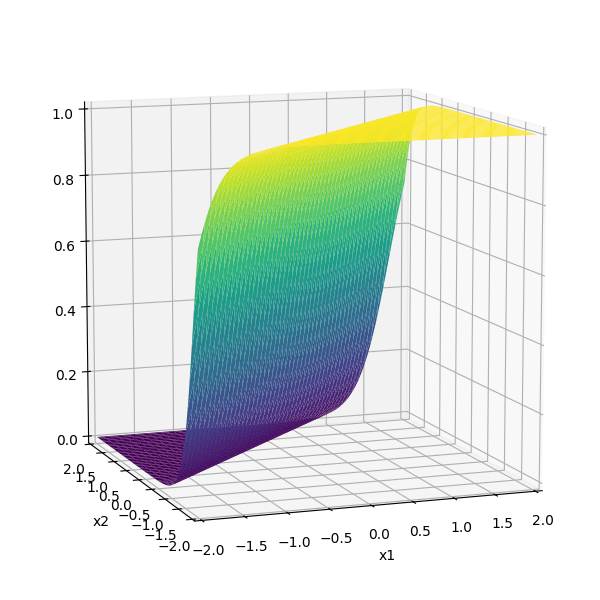
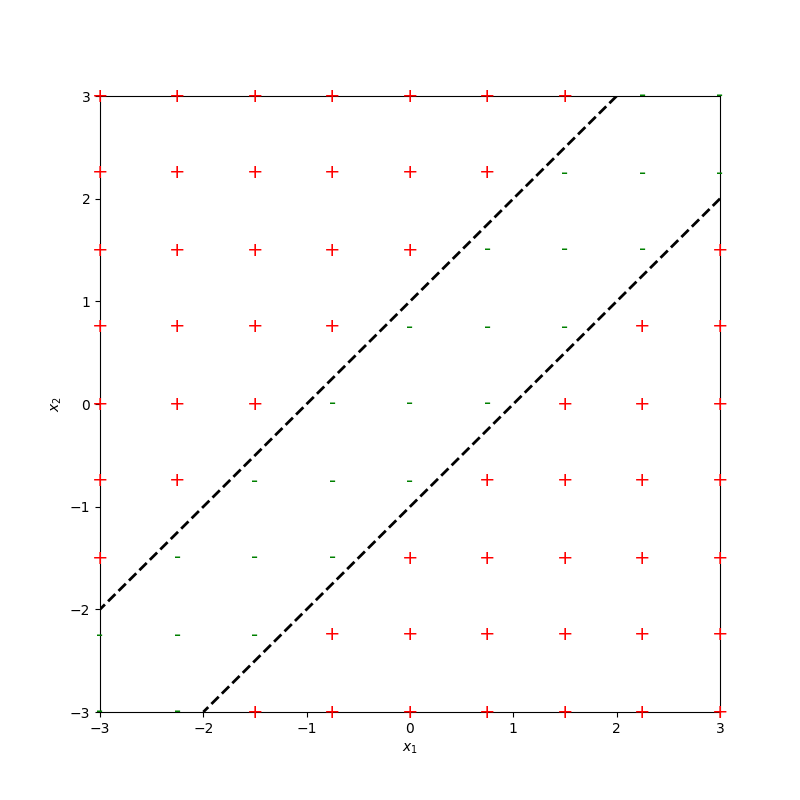
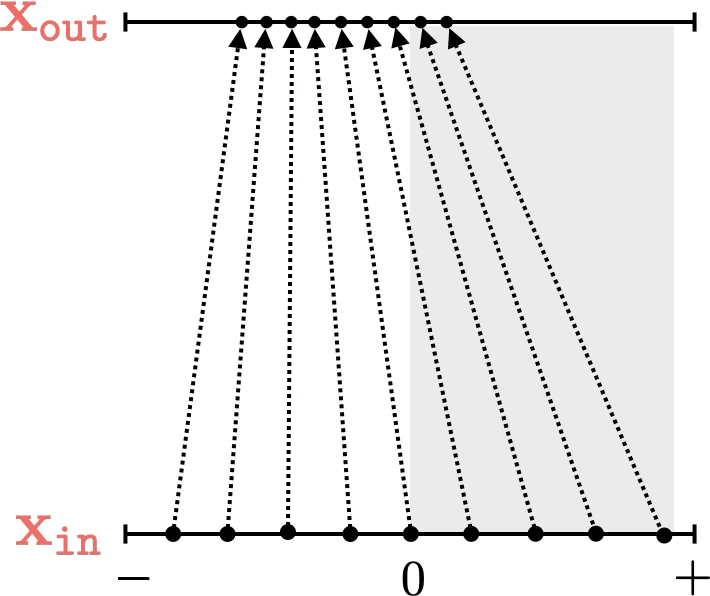
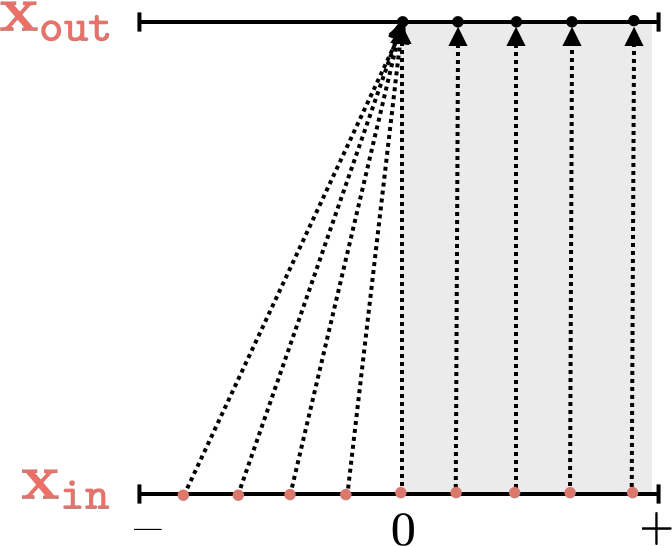
Two different ways to visualize a function
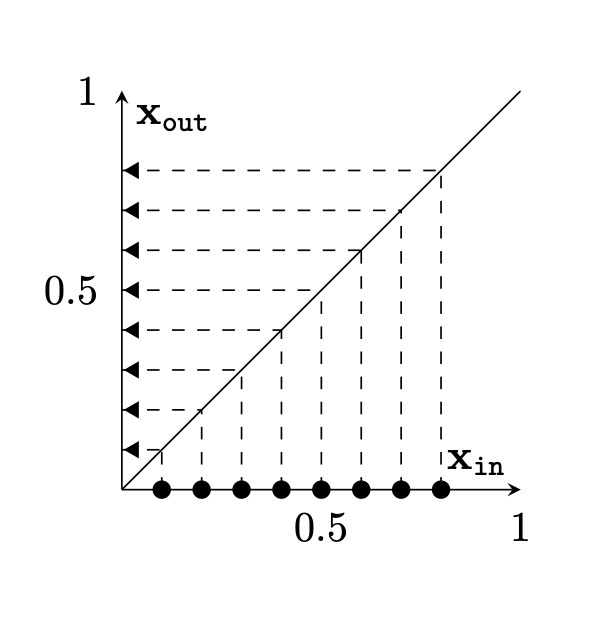
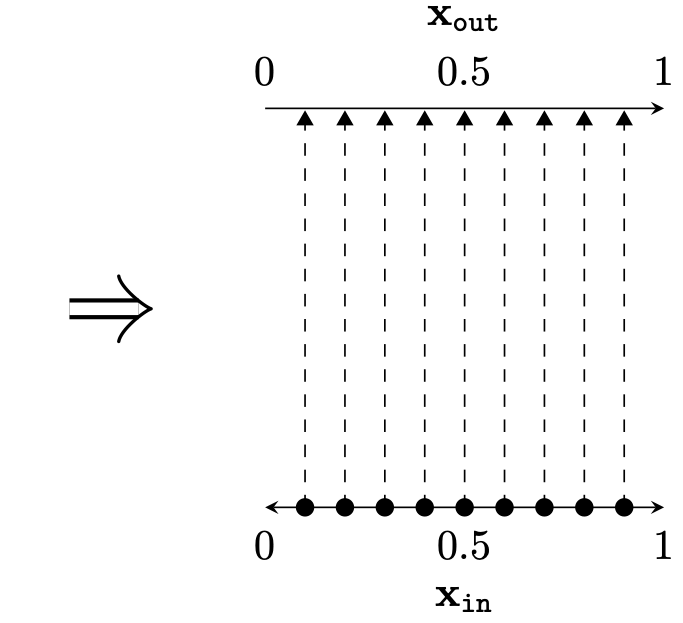
Two different ways to visualize a function
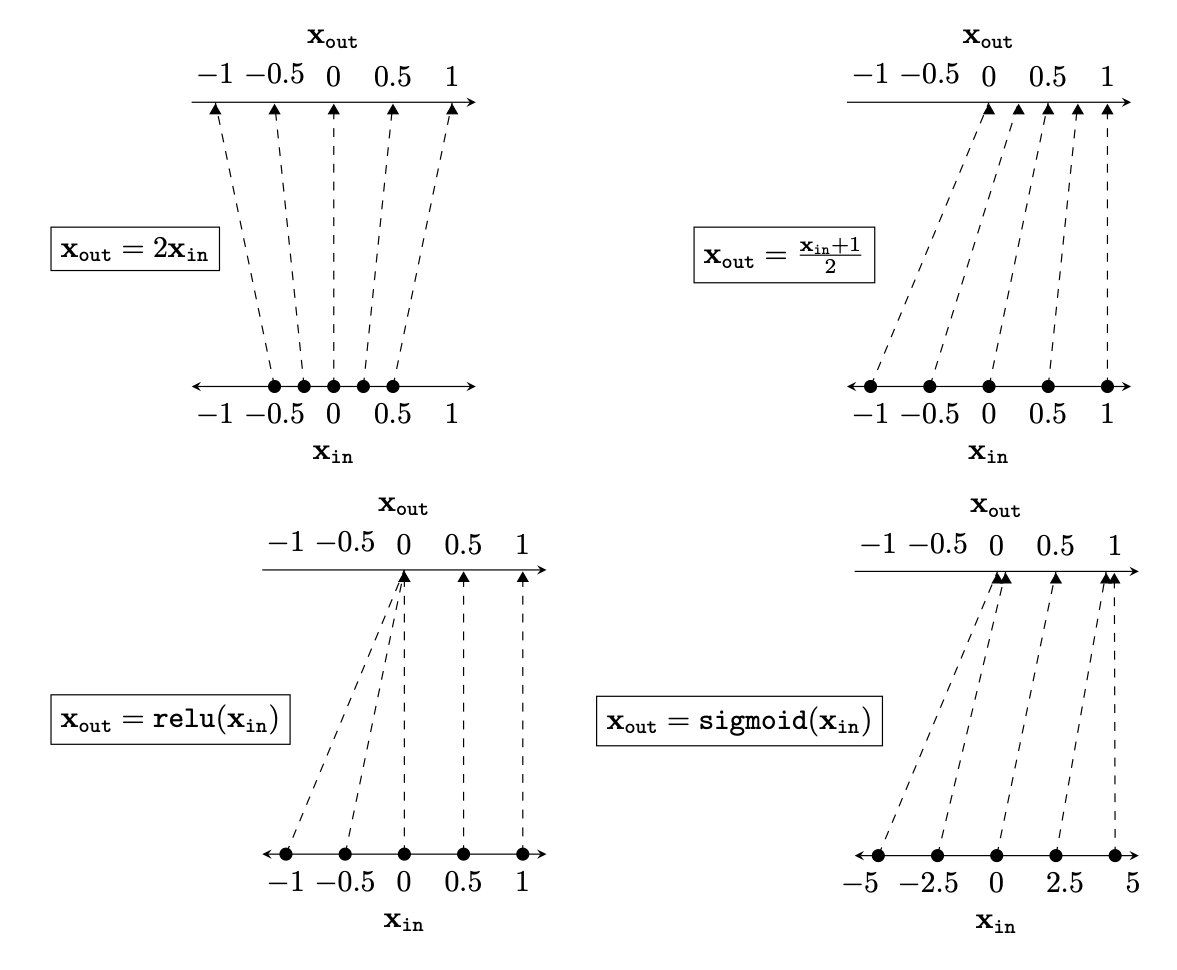
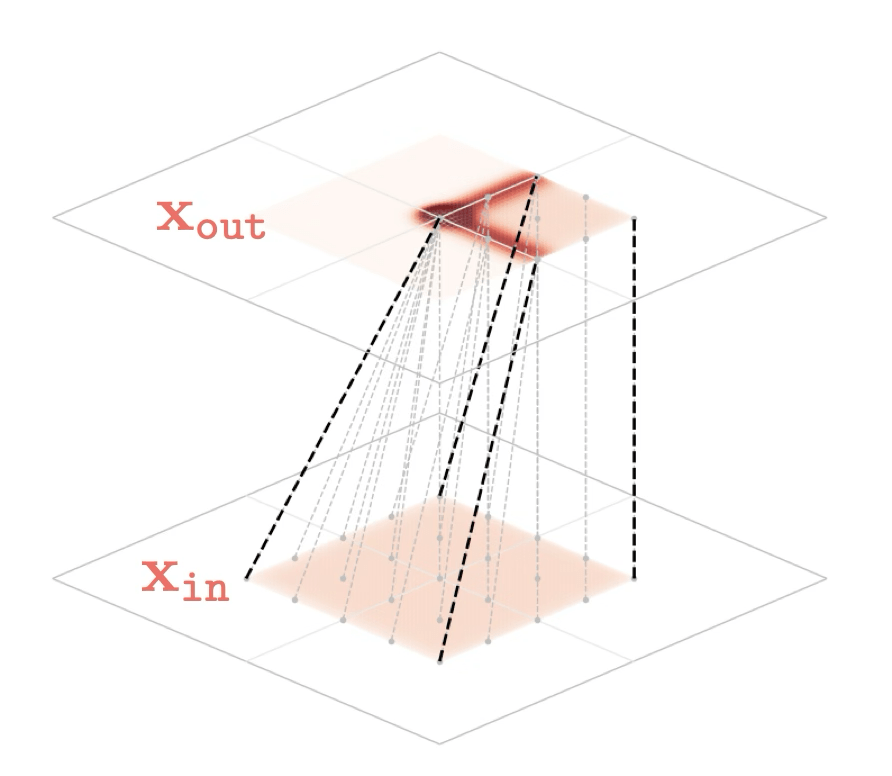
Representation transformations for a variety of neural net operations
and stack of neural net operations
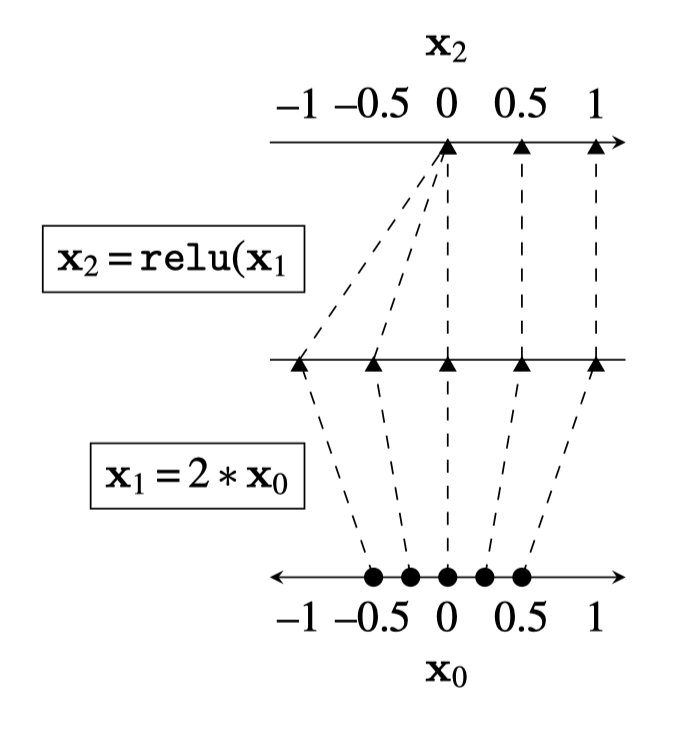

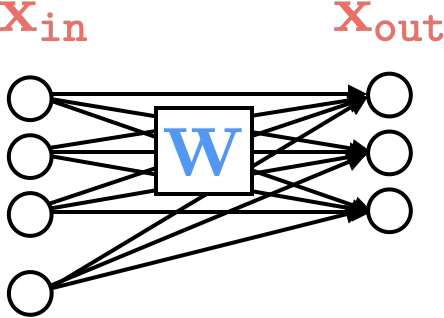
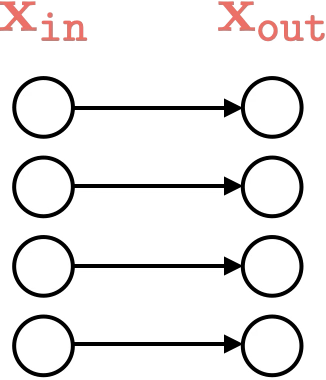
wiring graph
equation
mapping 1D
mapping 2D
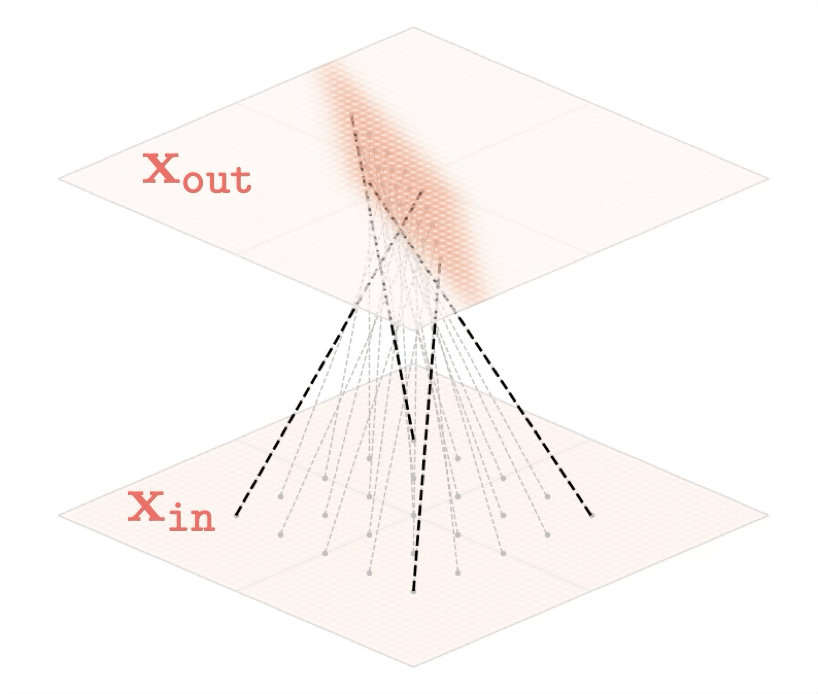


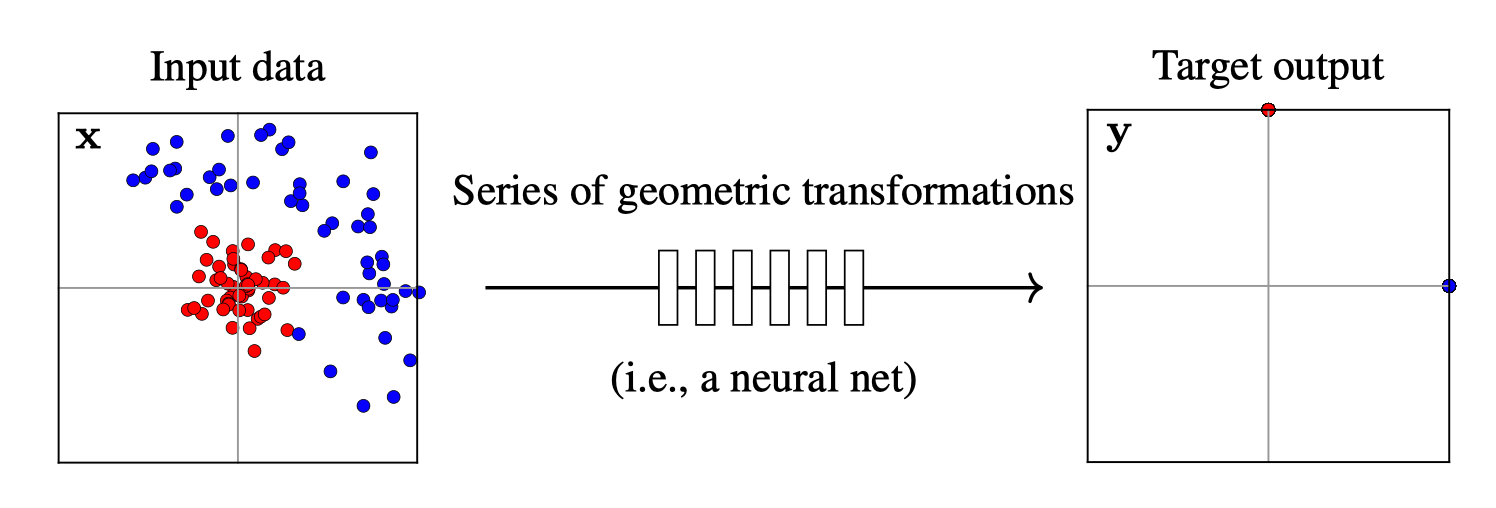
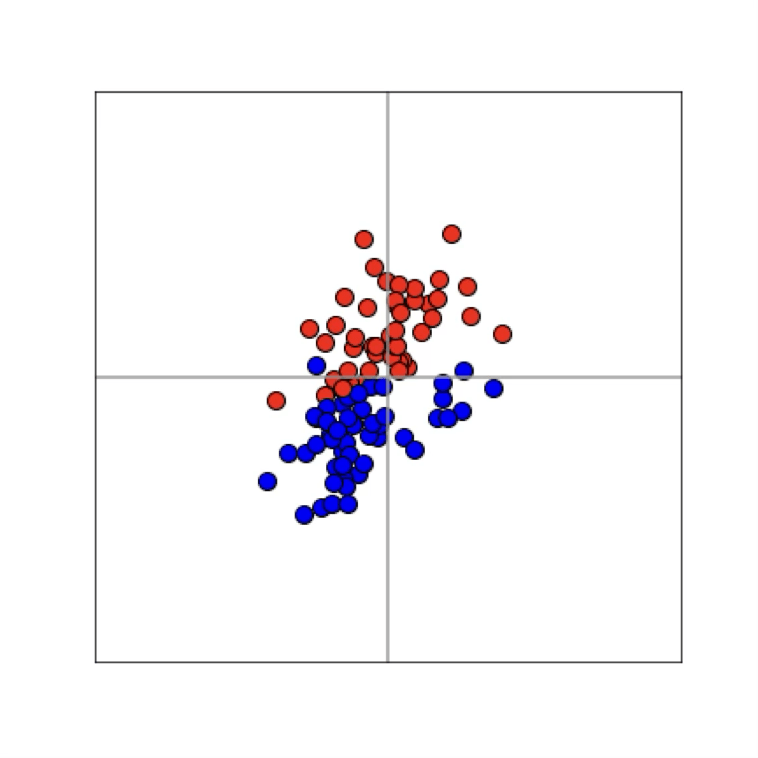
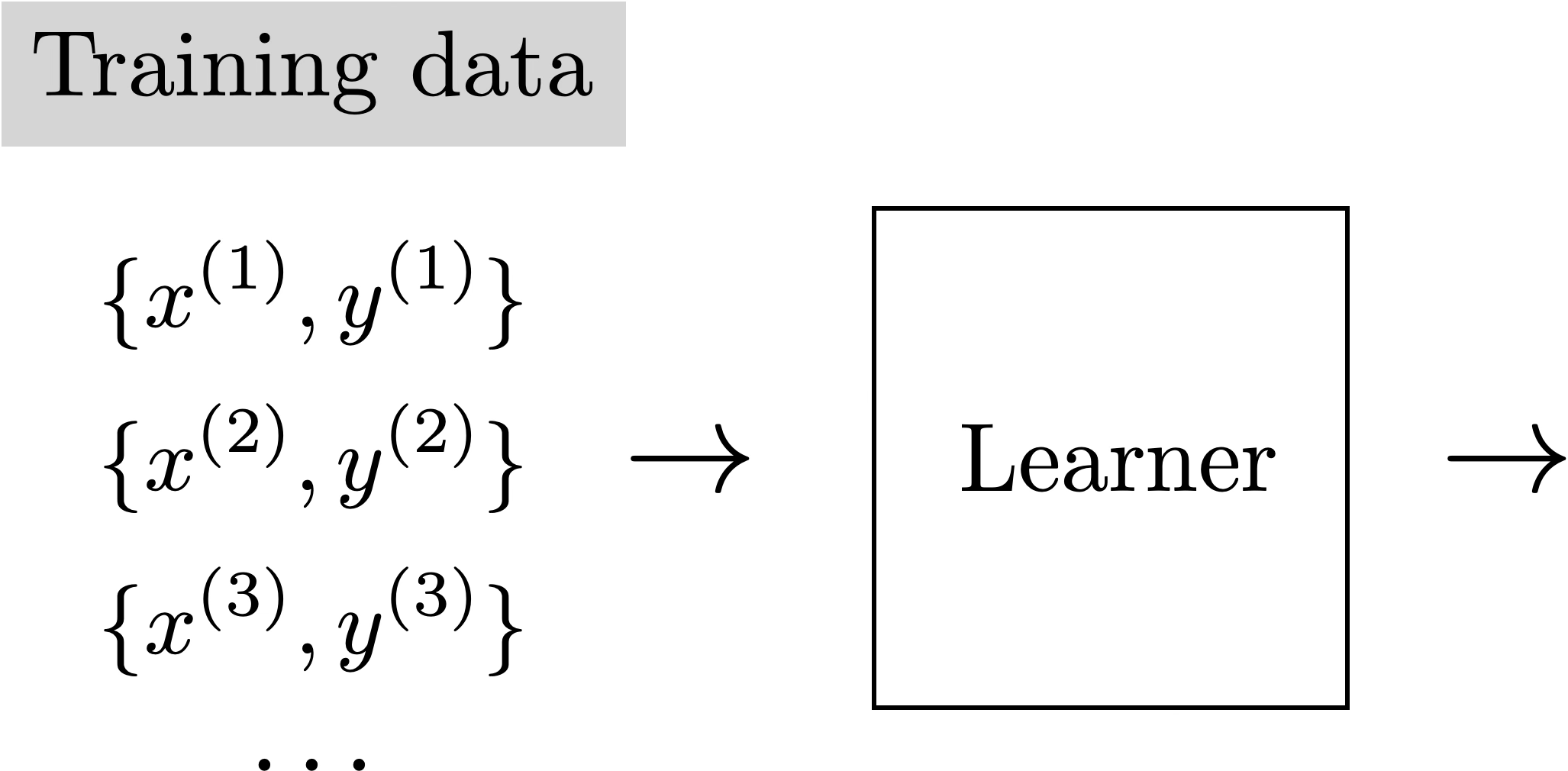
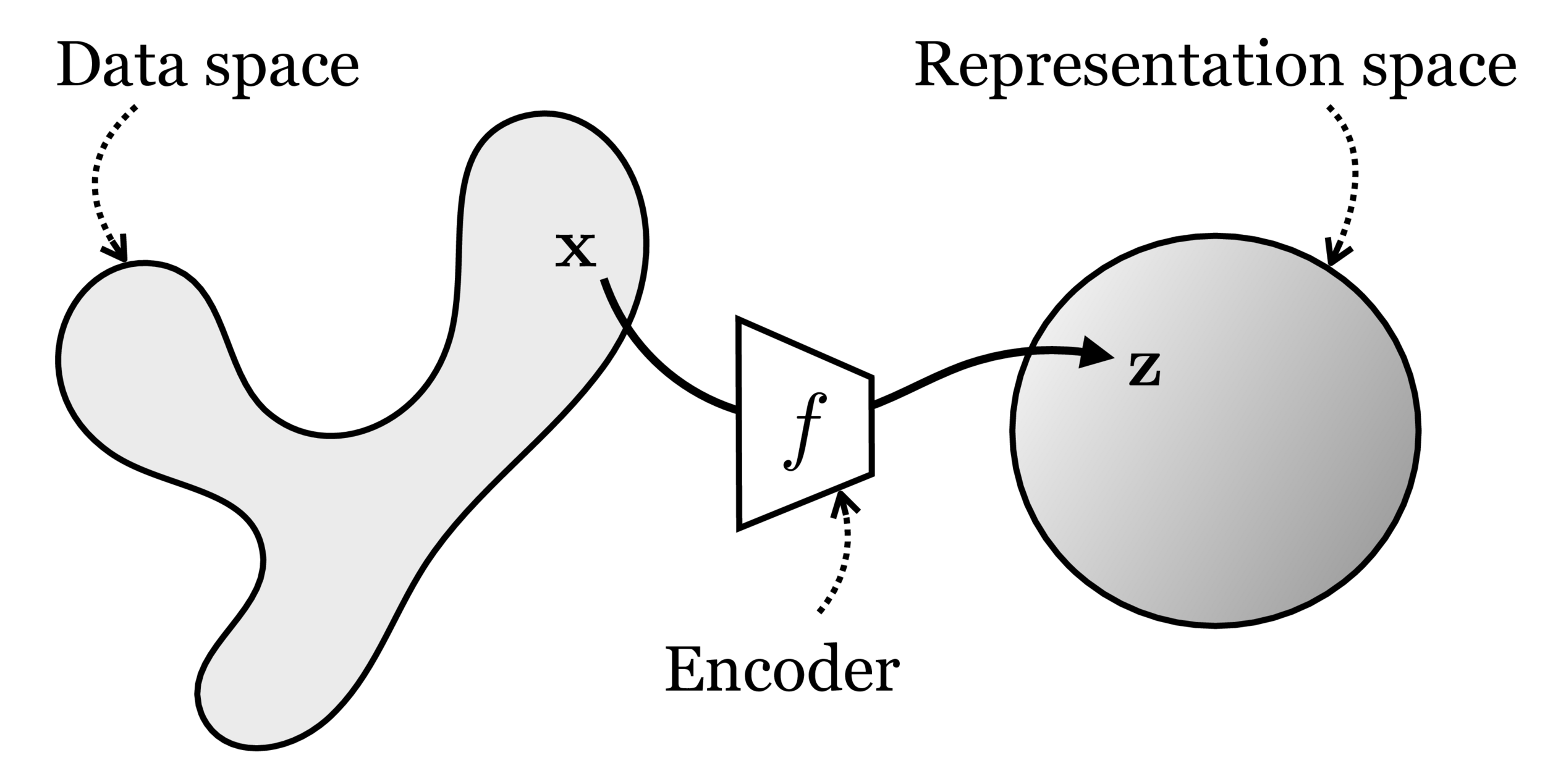
Training data
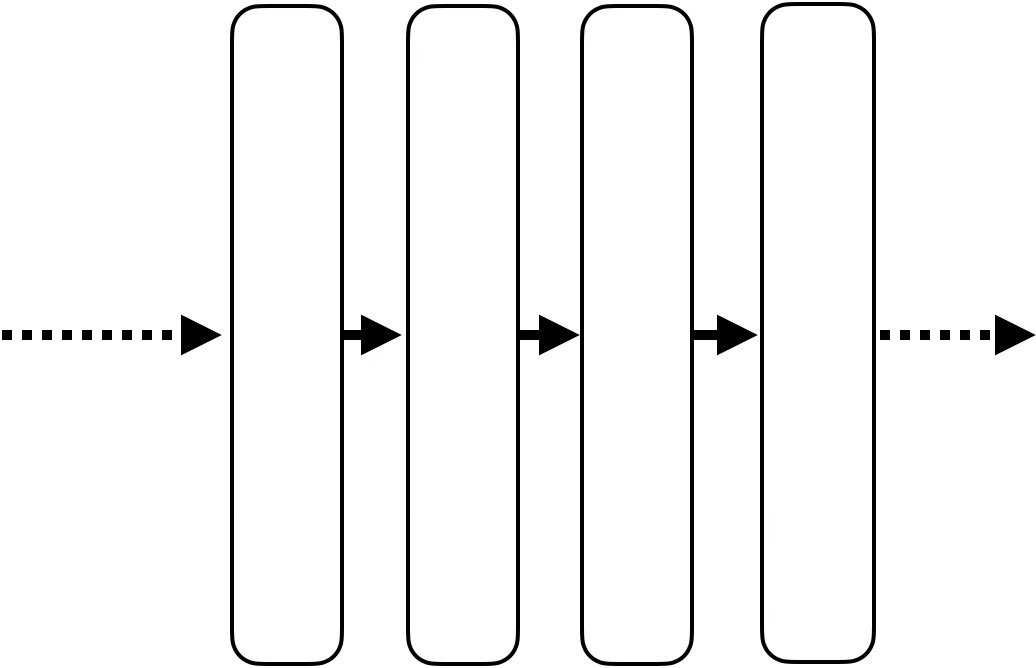
maps from complex data space to simple embedding space

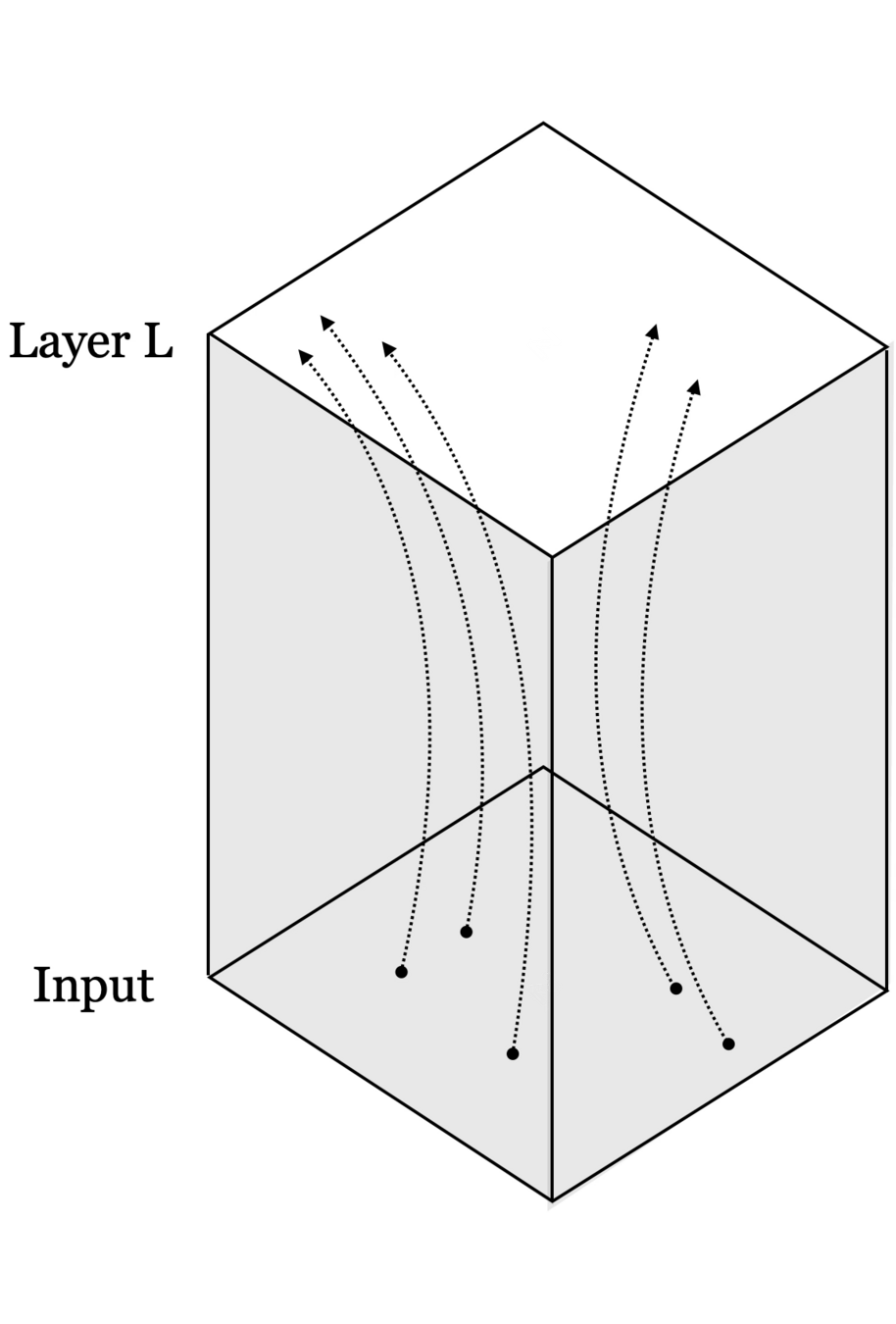
Neural networks are representation learners
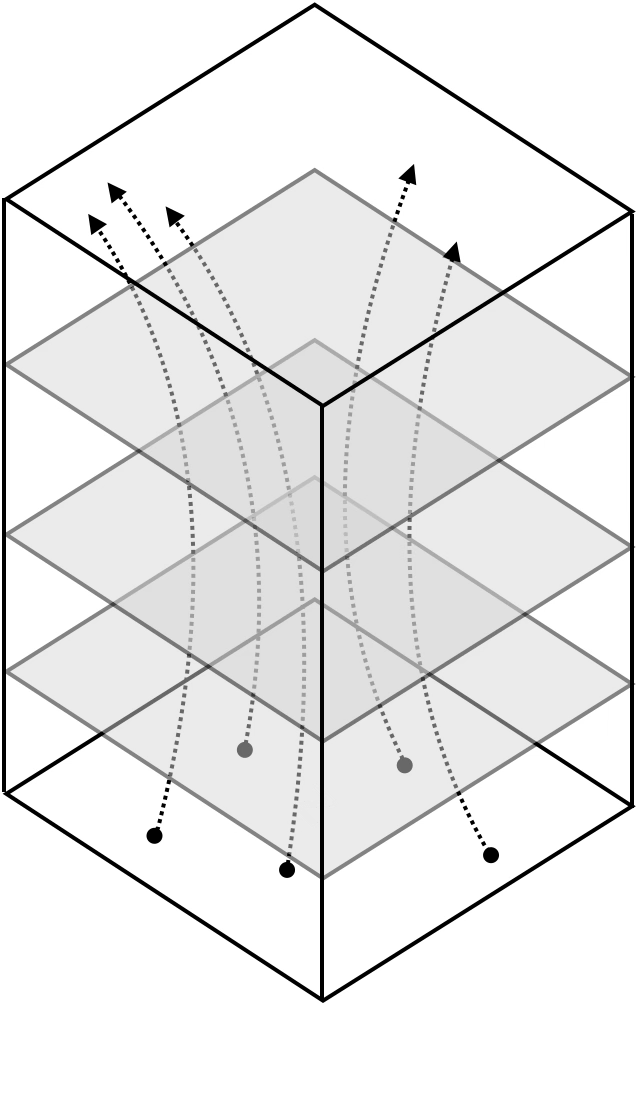
Deep nets transform datapoints, layer by layer
Each layer gives a different representation (aka embedding) of the data
🧠
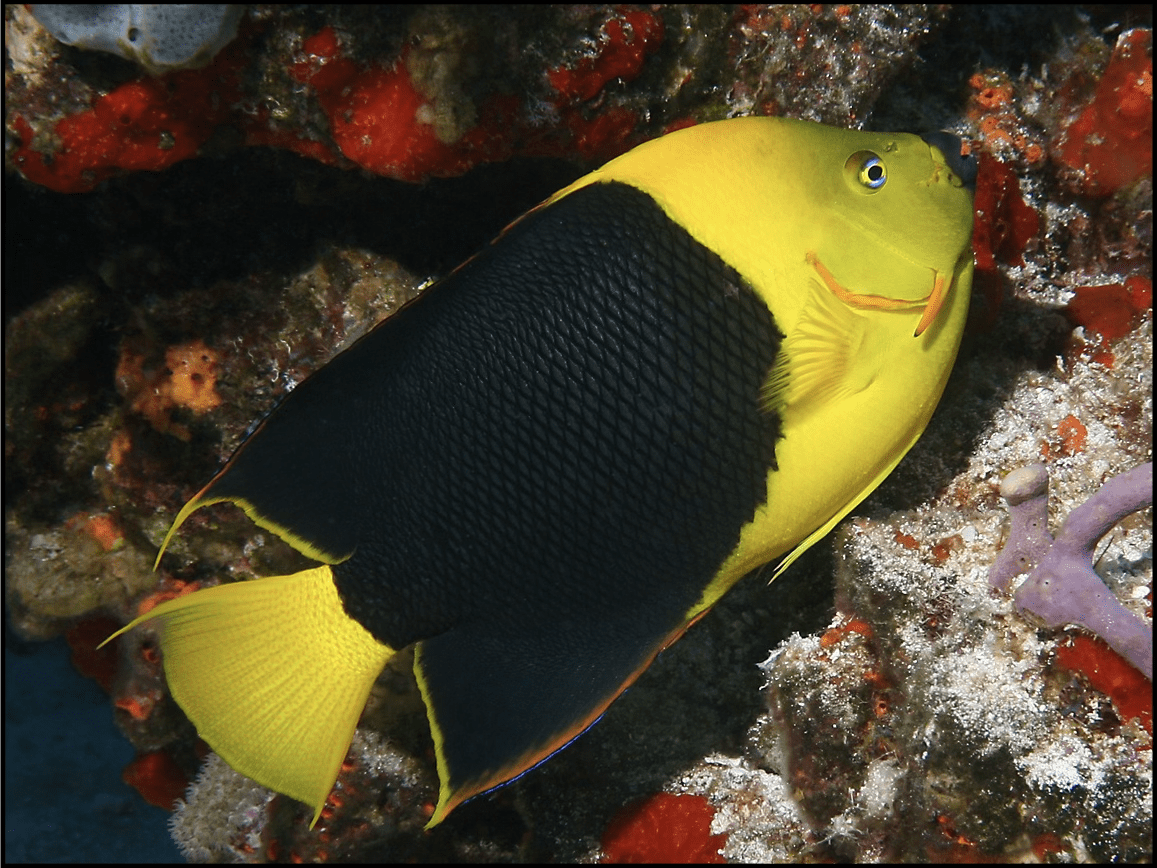
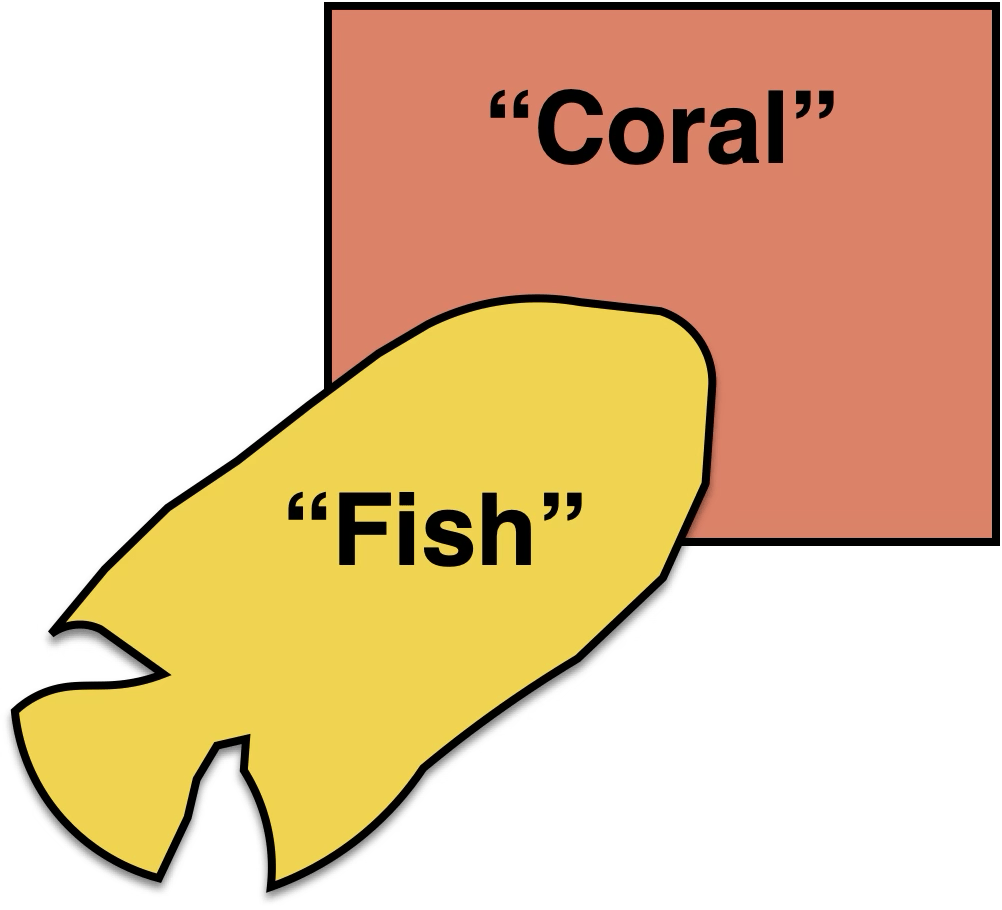
humans also learn representations
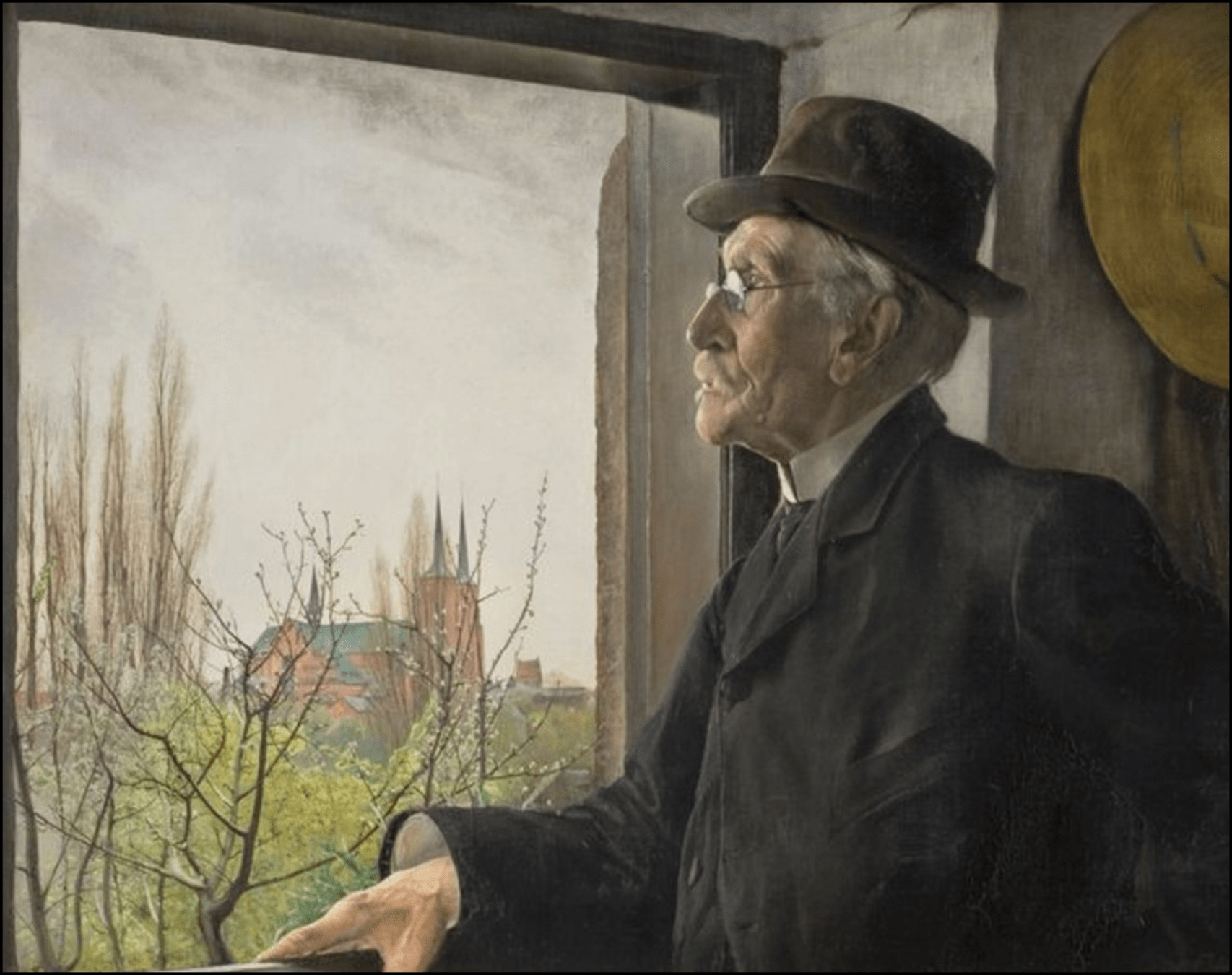
"I stand at the window and see a house, trees, sky. Theoretically I might say there were 327 brightnesses and nuances of colour. Do I have "327"? No. I have sky, house, and trees.”
— Max Wertheimer, 1923
Good representations are:
- Compact (minimal)
- Explanatory (roughly sufficient)
[See “Representation Learning”, Bengio 2013, for more commentary]
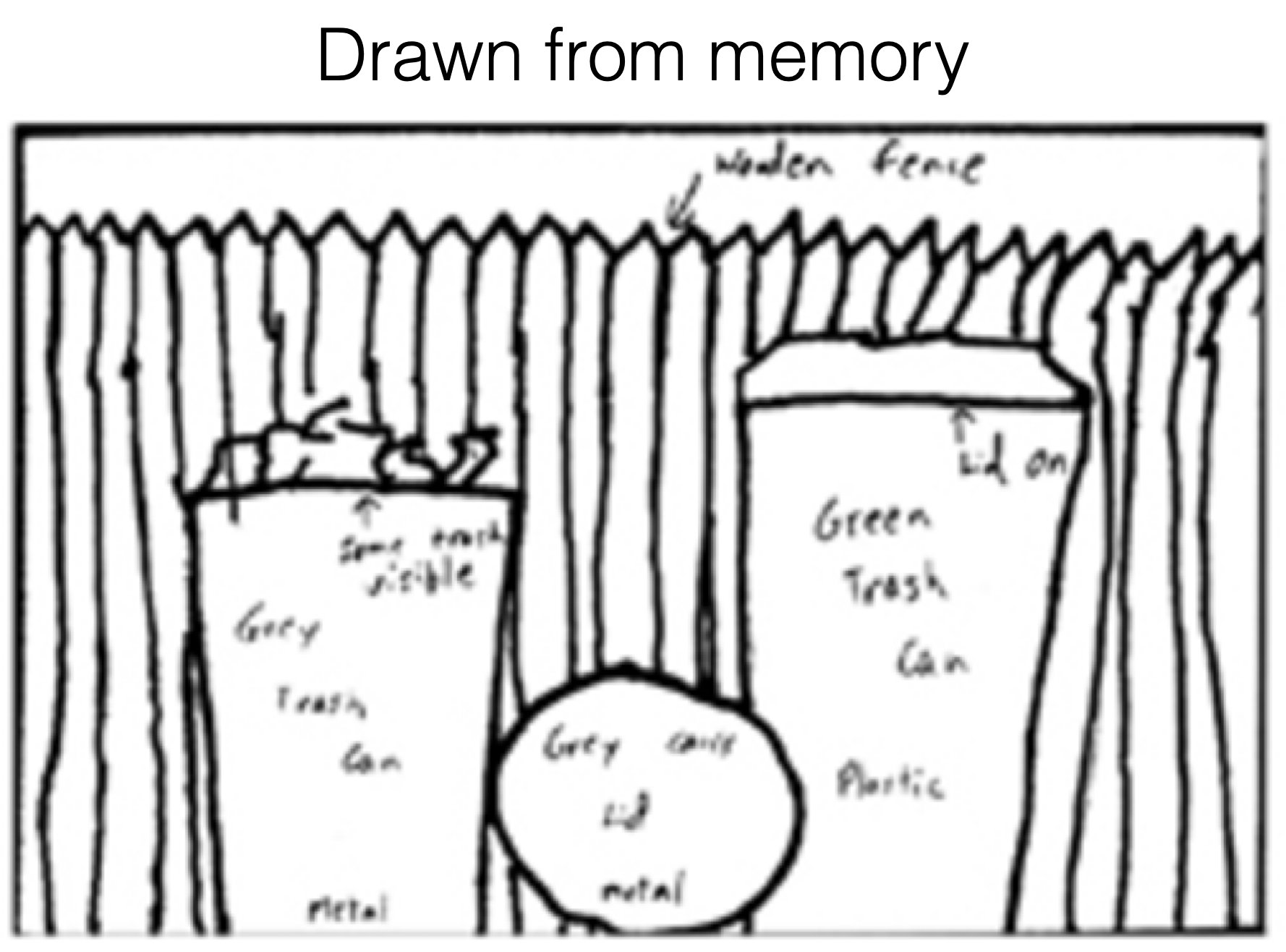

[Bartlett, 1932]
[Intraub & Richardson, 1989]
[https://www.behance.net/gallery/35437979/Velocipedia]


Outline
- Recap, neural networks mechanism
- Neural networks are representation learners
-
Auto-encoder:
- Bottleneck
- Reconstruction
- Unsupervised learning
- (Some recent representation learning ideas)
- Compact (minimal)
- Explanatory (roughly sufficient)
- Disentangled (independent factors)
- Interpretable
- Make subsequent problem solving easy
[See “Representation Learning”, Bengio 2013, for more commentary]
Auto-encoders try to achieve these
these may just emerge as well
Good representations are:
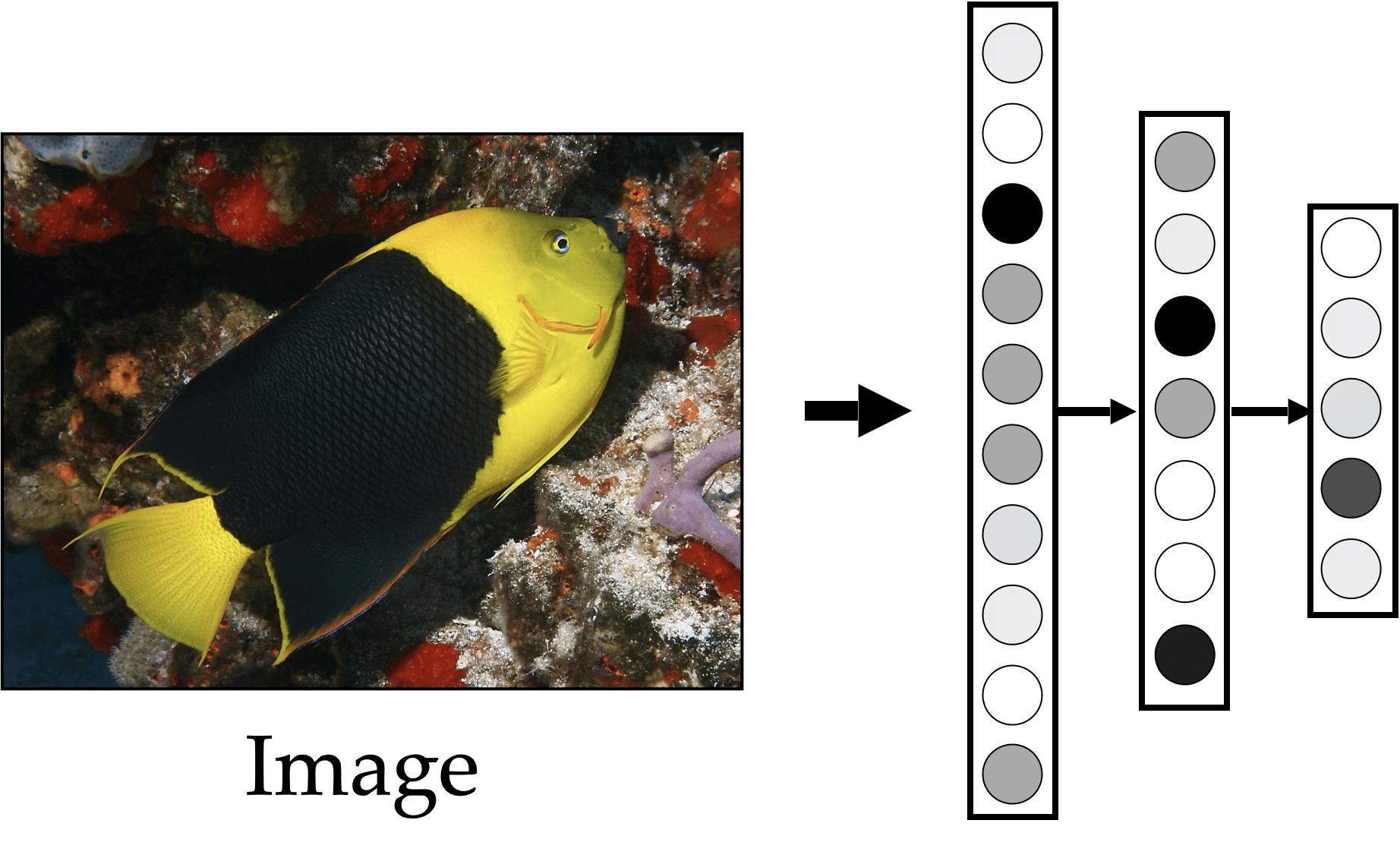
compact representation/embedding
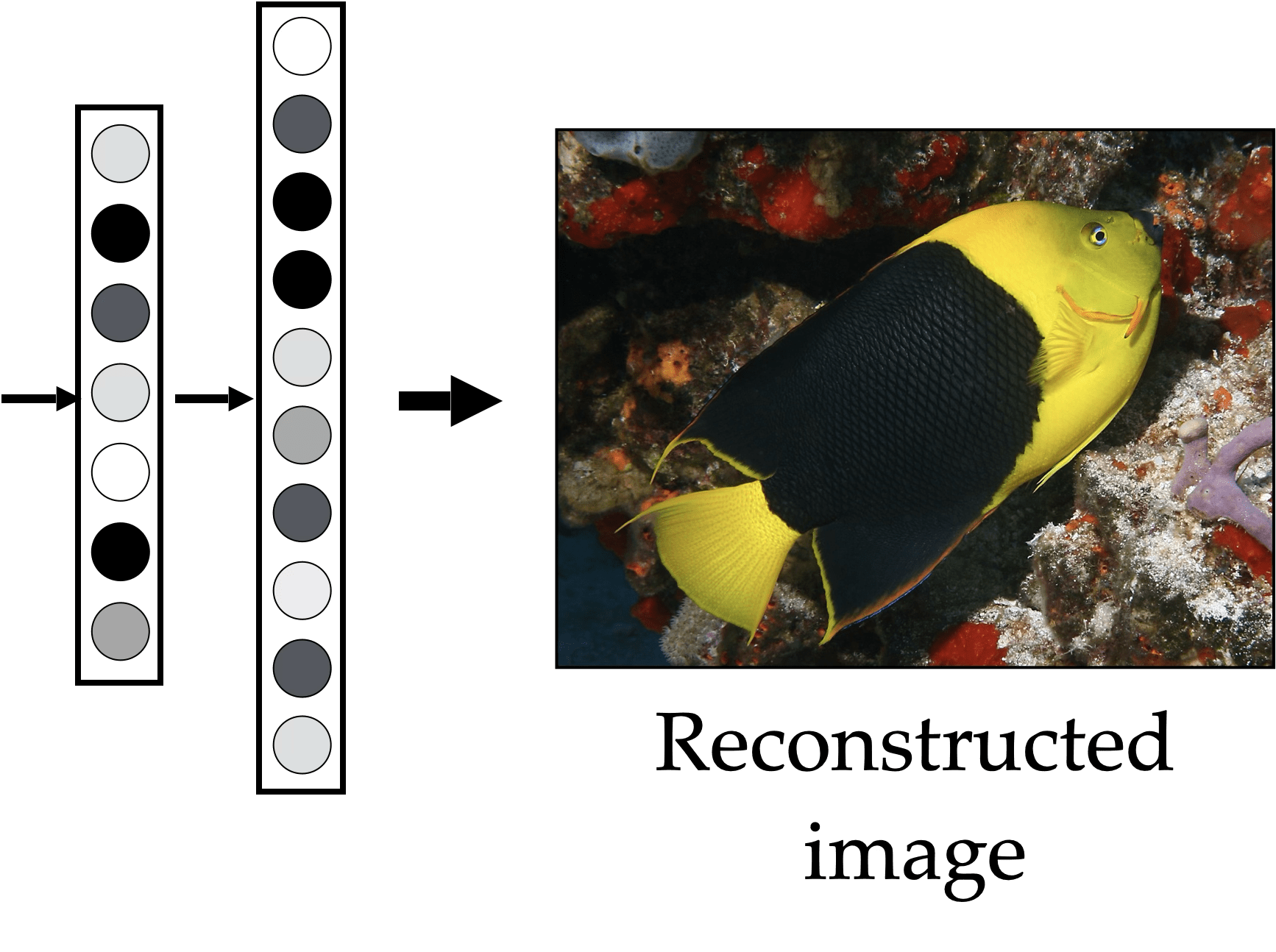
Auto-encoder
Auto-encoder
"What I cannot create, I do not understand." Feynman
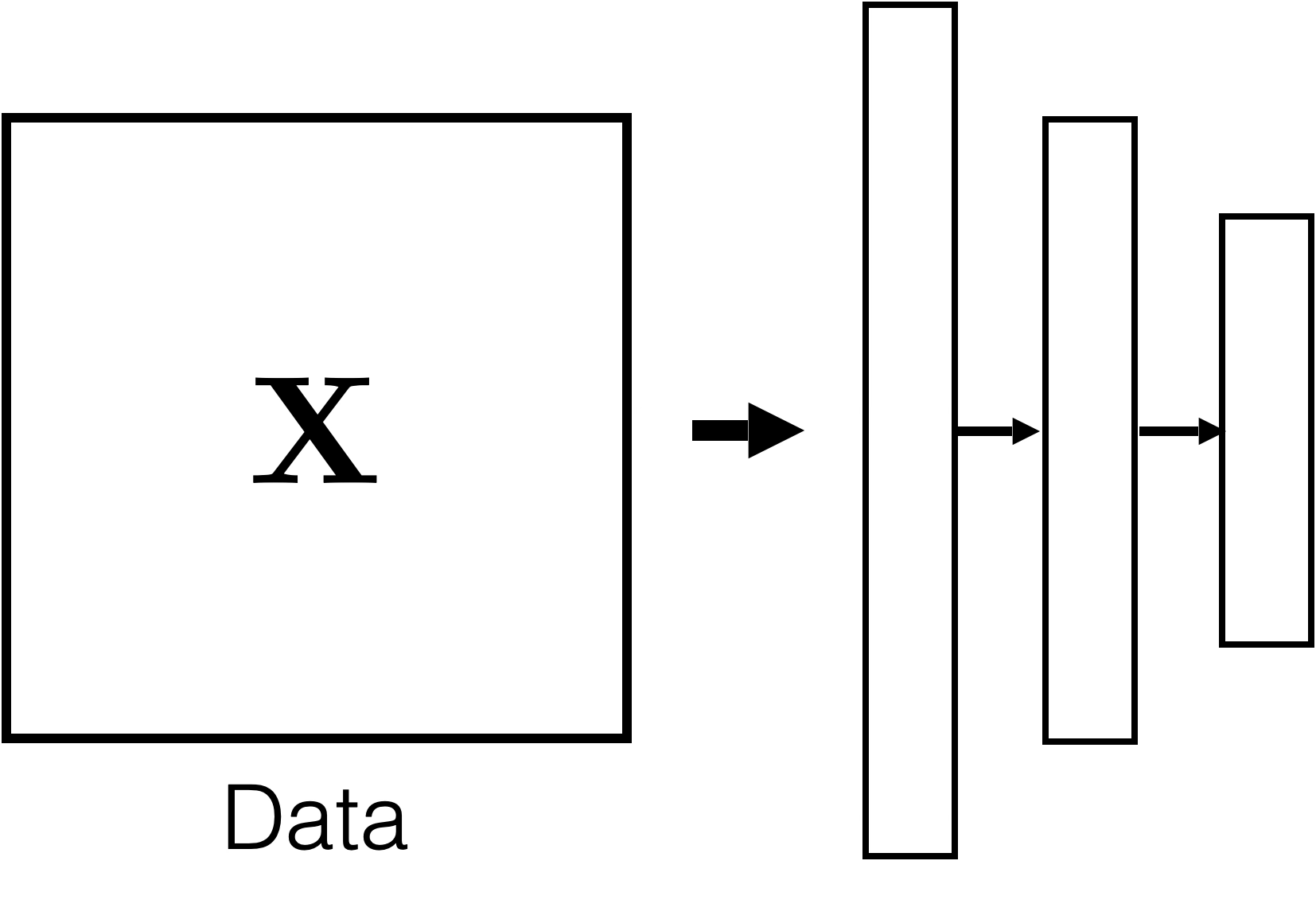
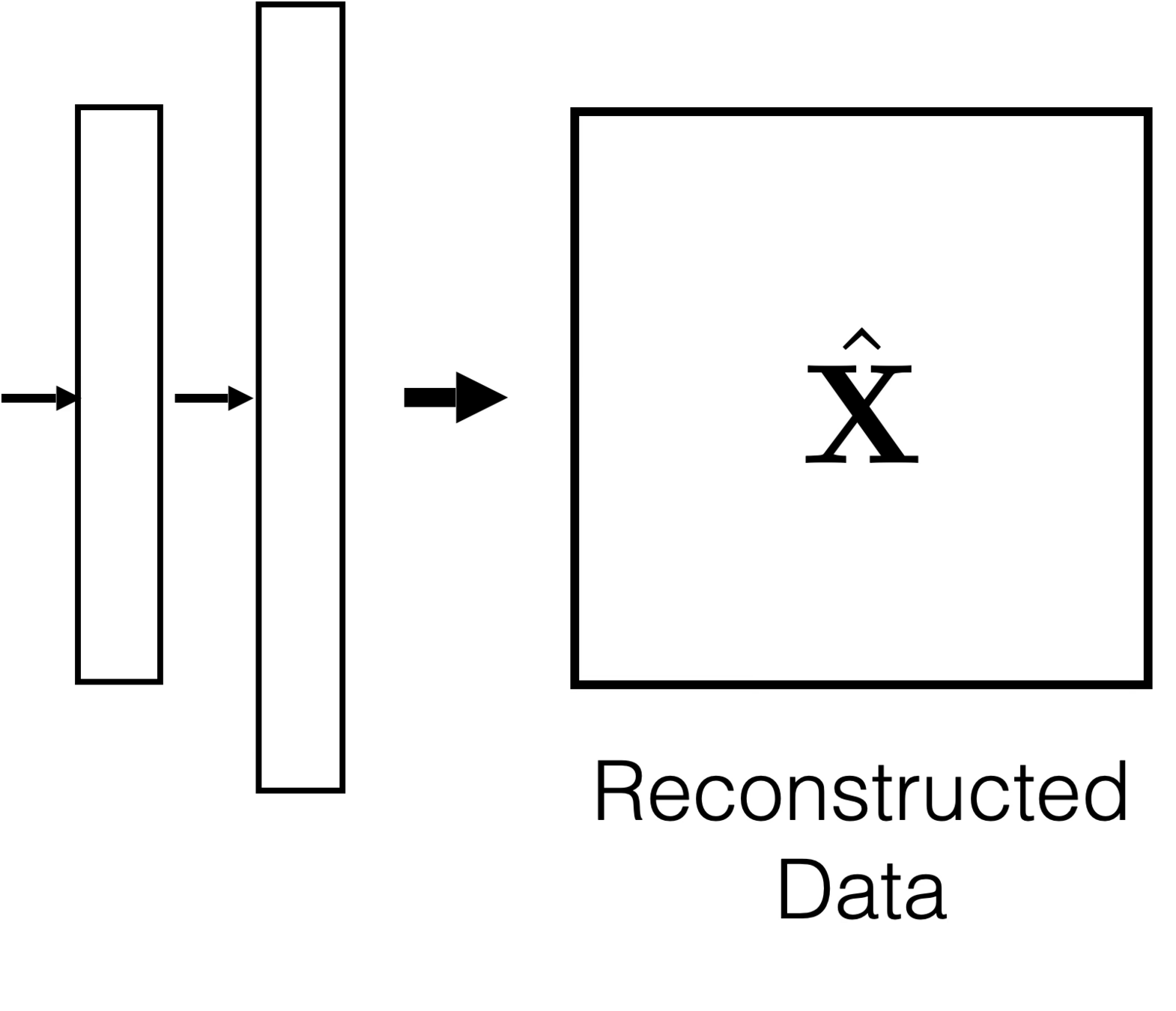
Auto-encoder
encoder
decoder
bottleneck
Auto-encoder
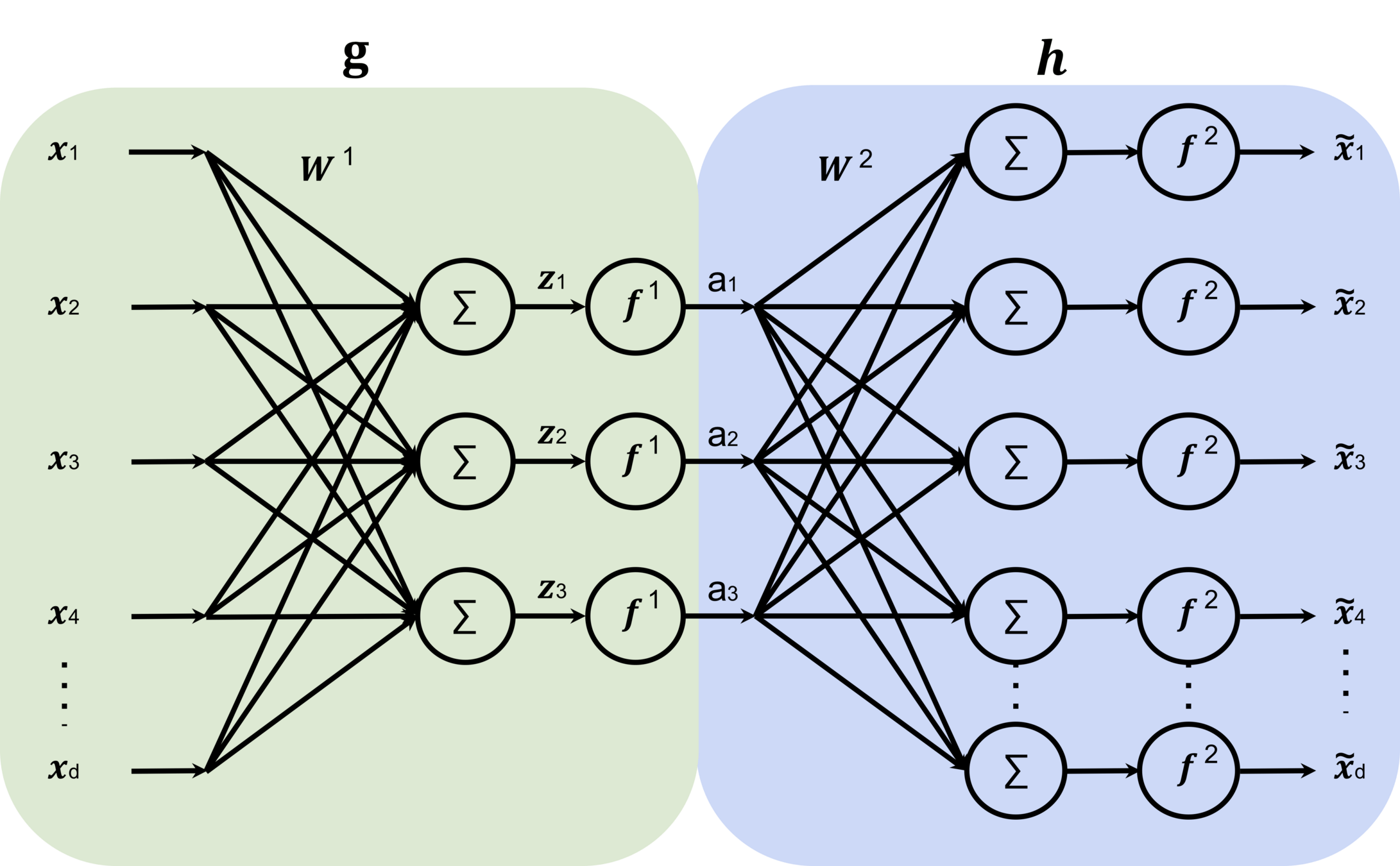
input \(x \in \mathbb{R^d}\)
output \(\tilde{x} \in \mathbb{R^d}\)
bottleneck
typically, has lower dimension than \(d\)
Auto-encoder
Training Data
loss/objective
hypothesis class
A model
\(f\)
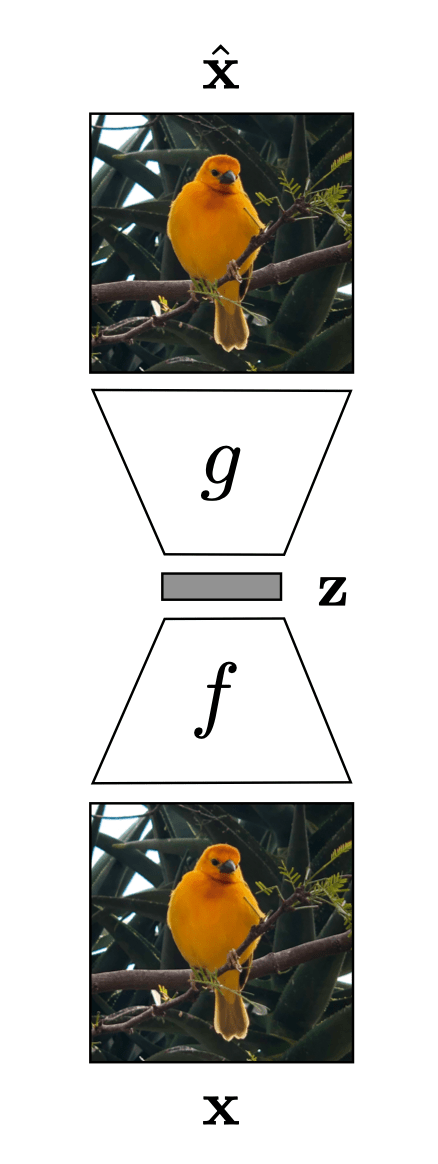
\(m<d\)
\(f: X \rightarrow Y\)
Supervised Learning
"Good"
Representation
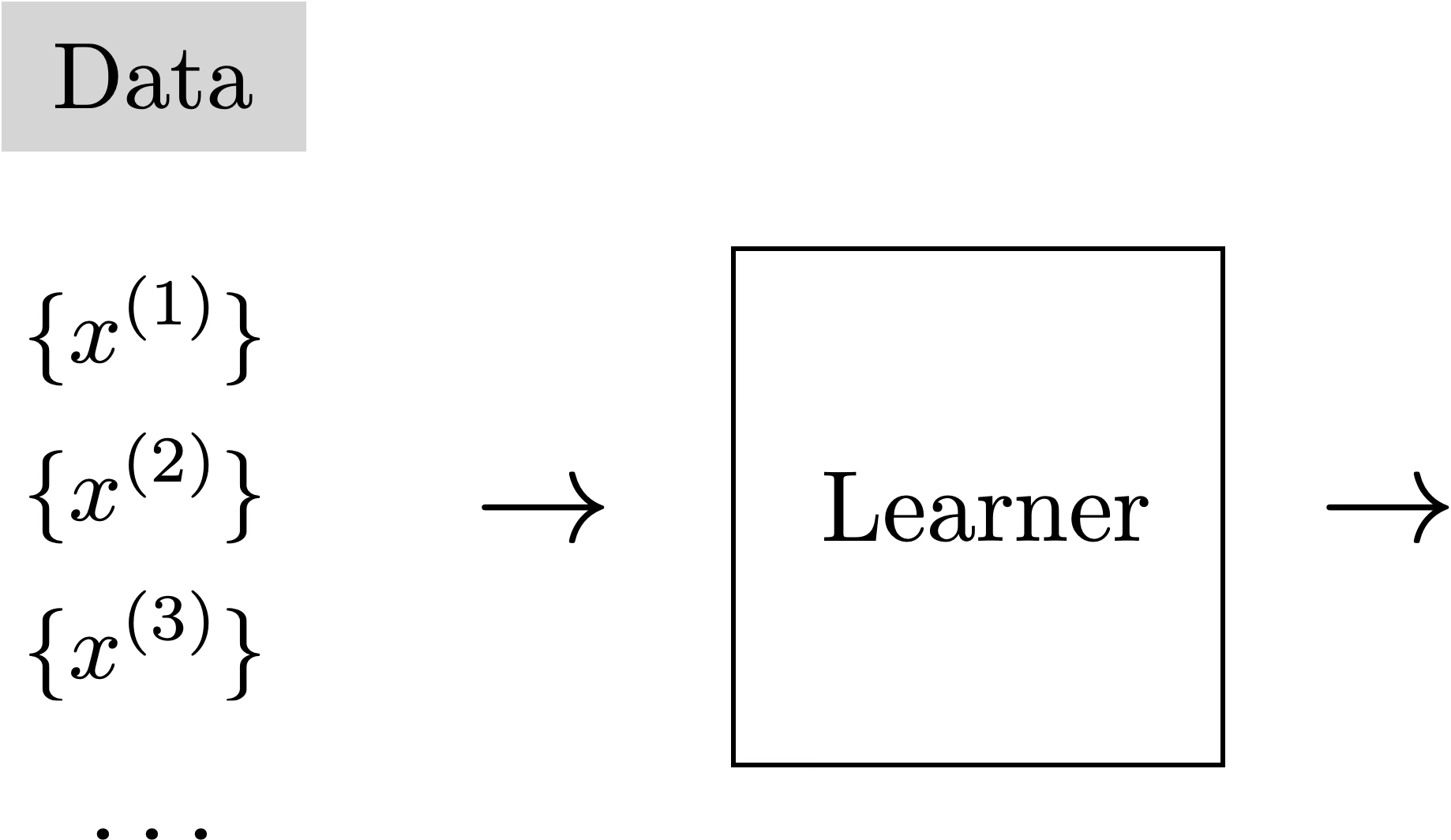
Unsupervised Learning
Training Data
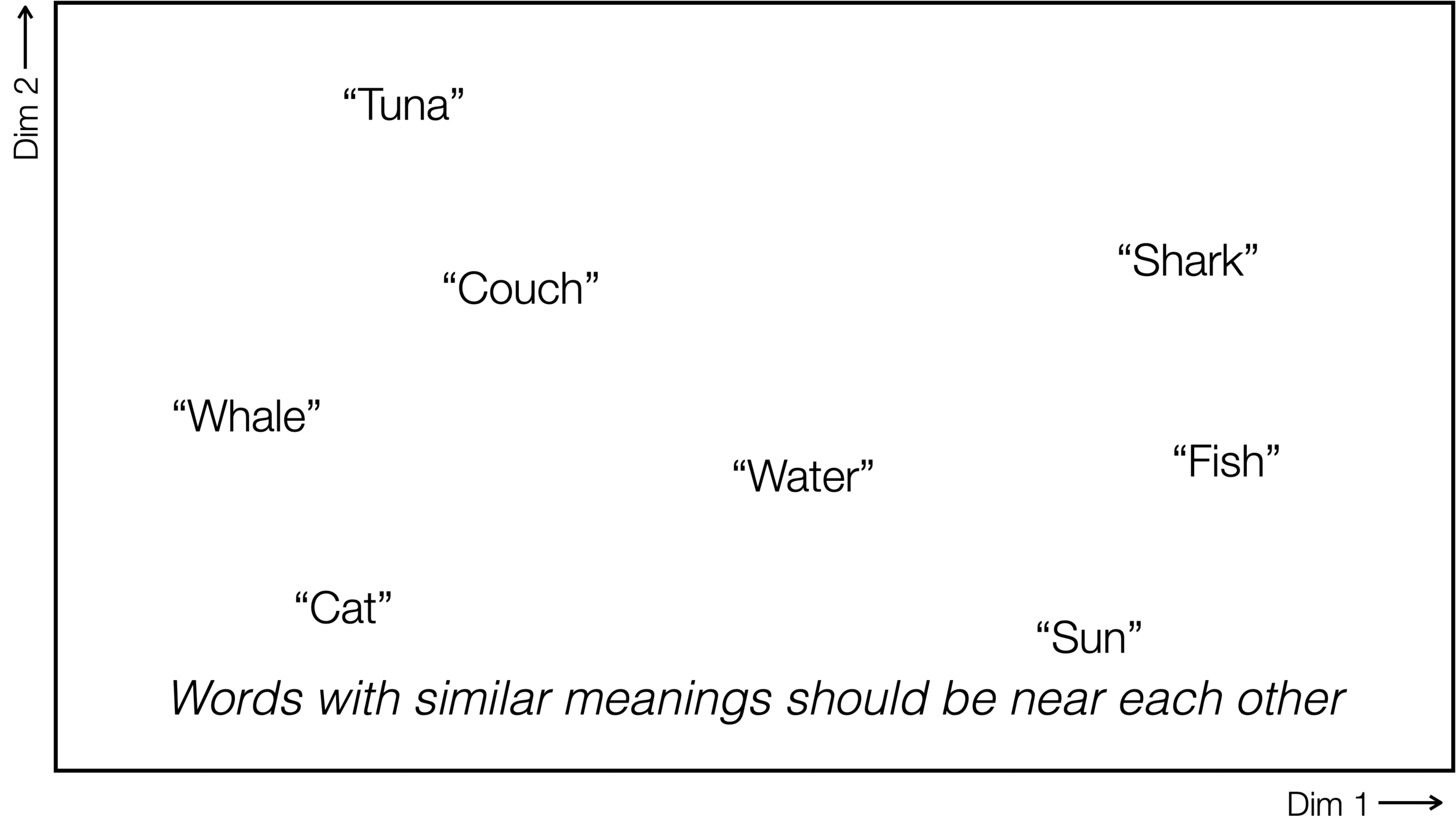
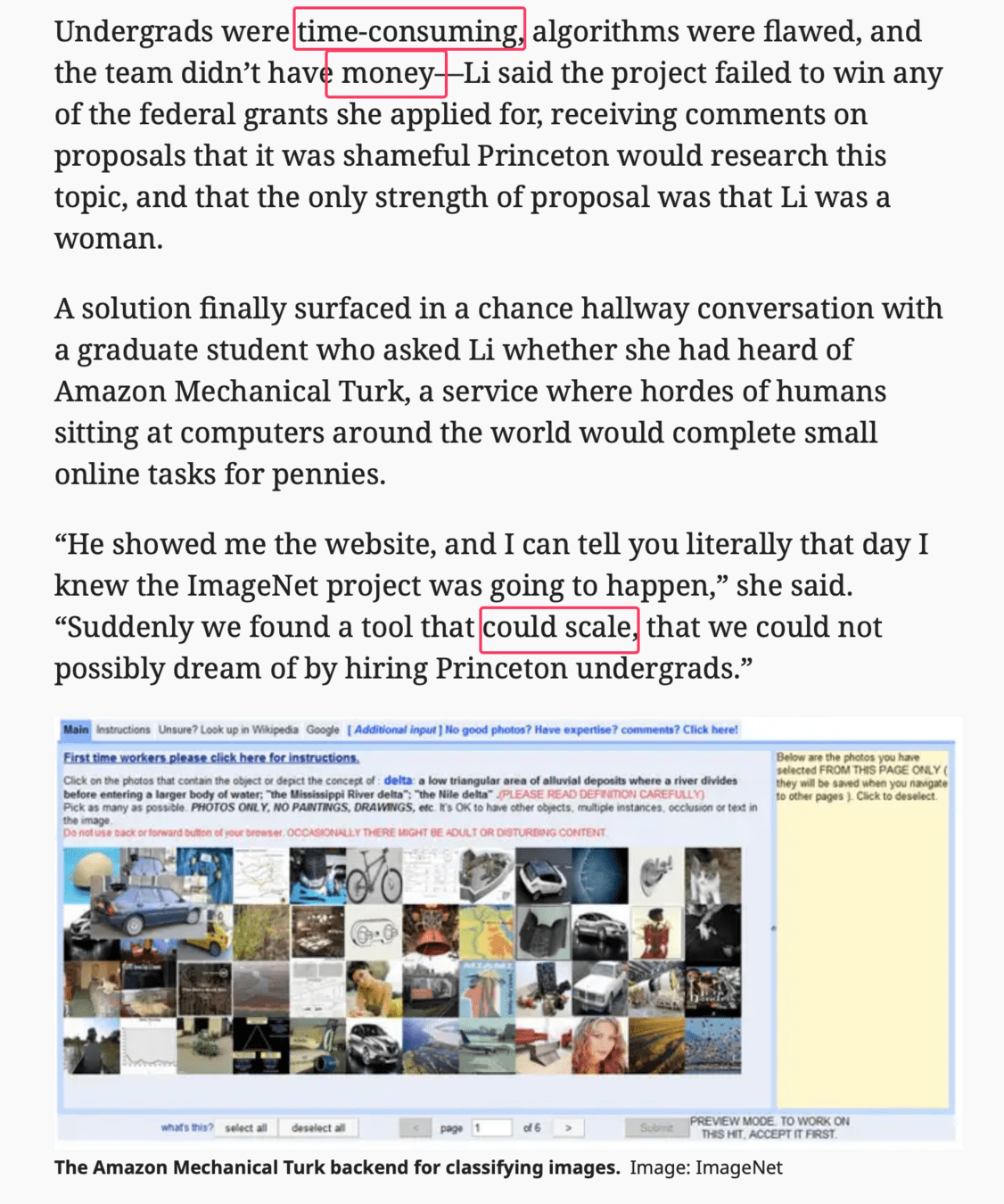
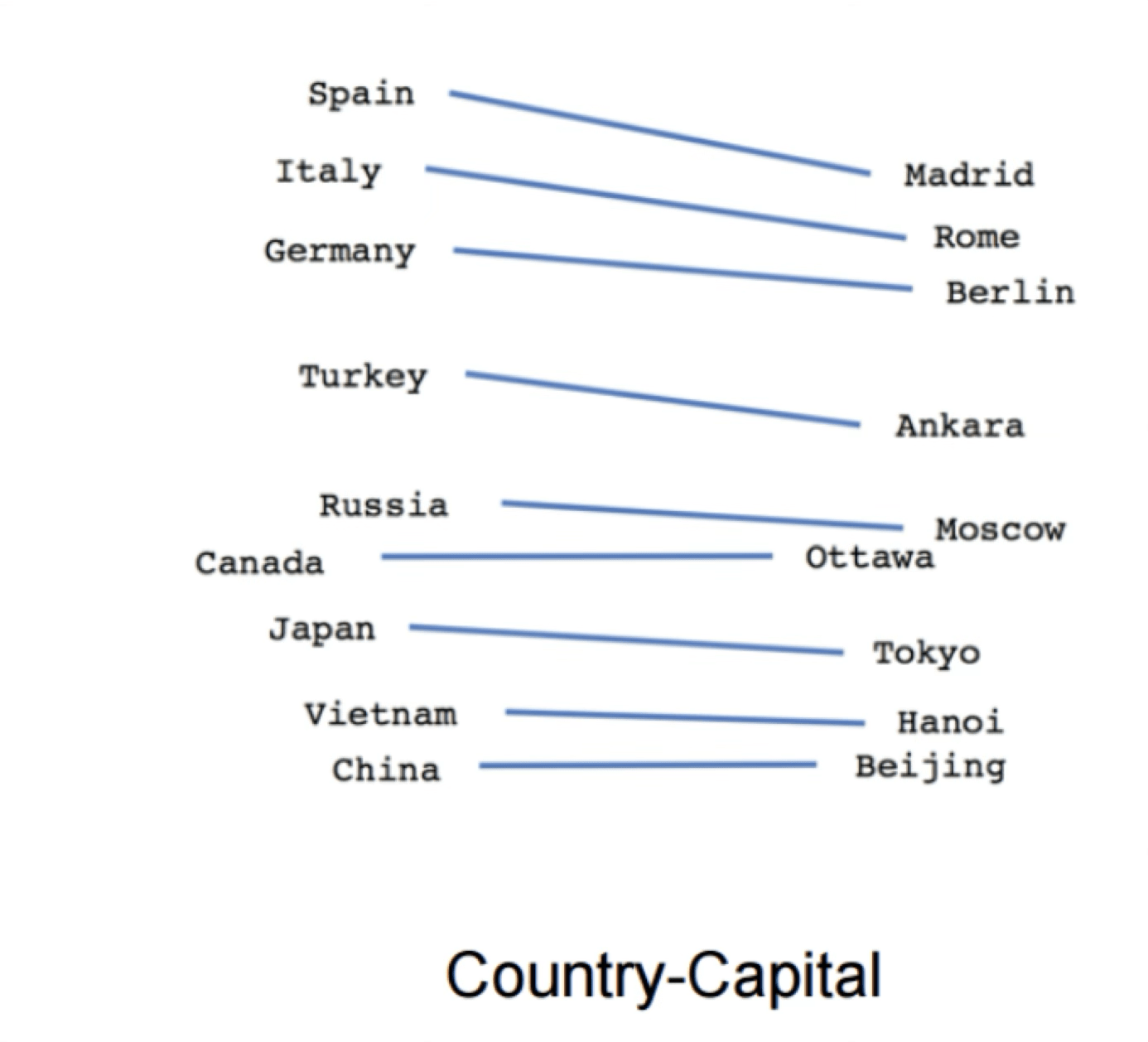
Word2Vec
https://www.tensorflow.org/text/tutorials/word2vec
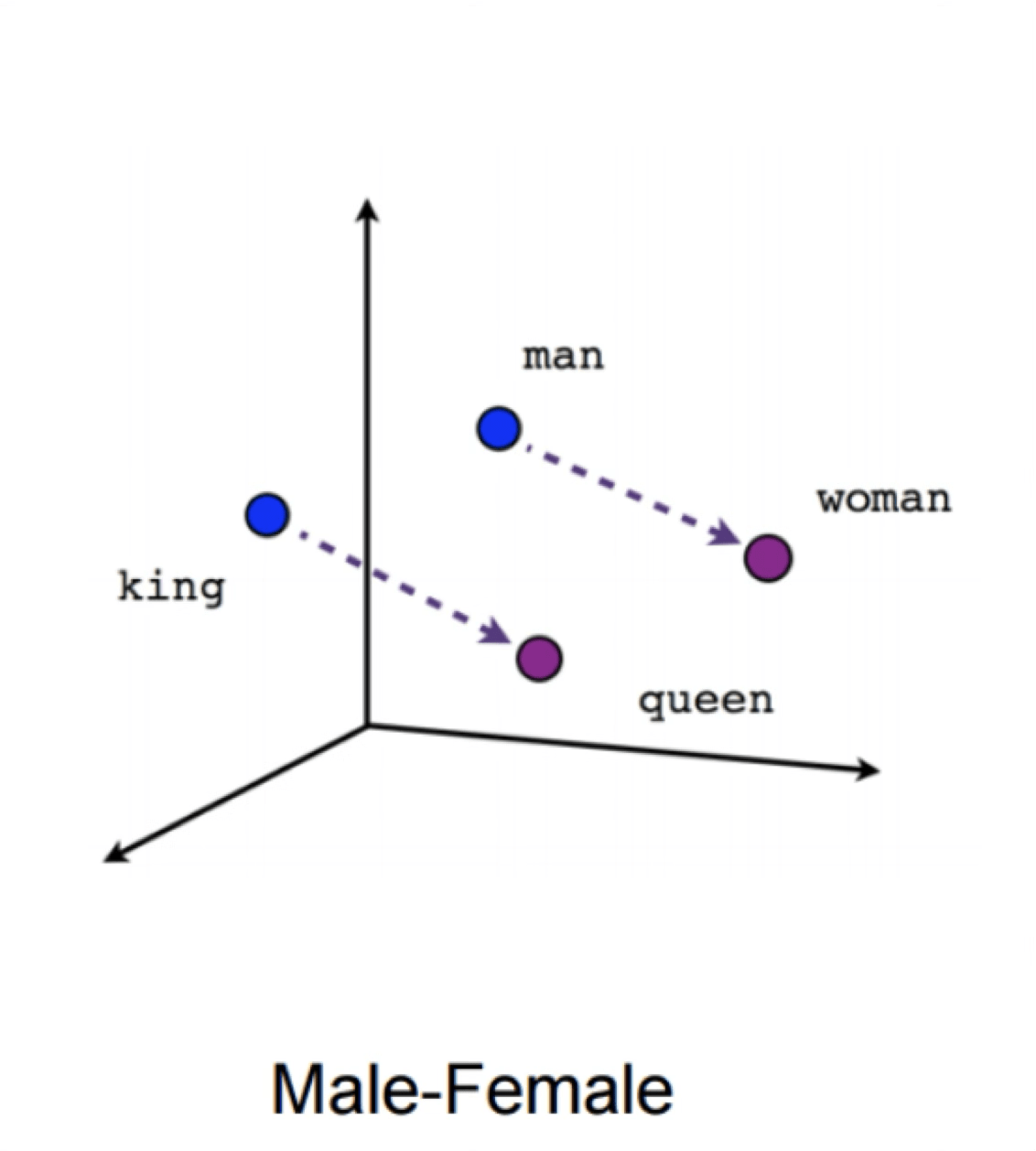
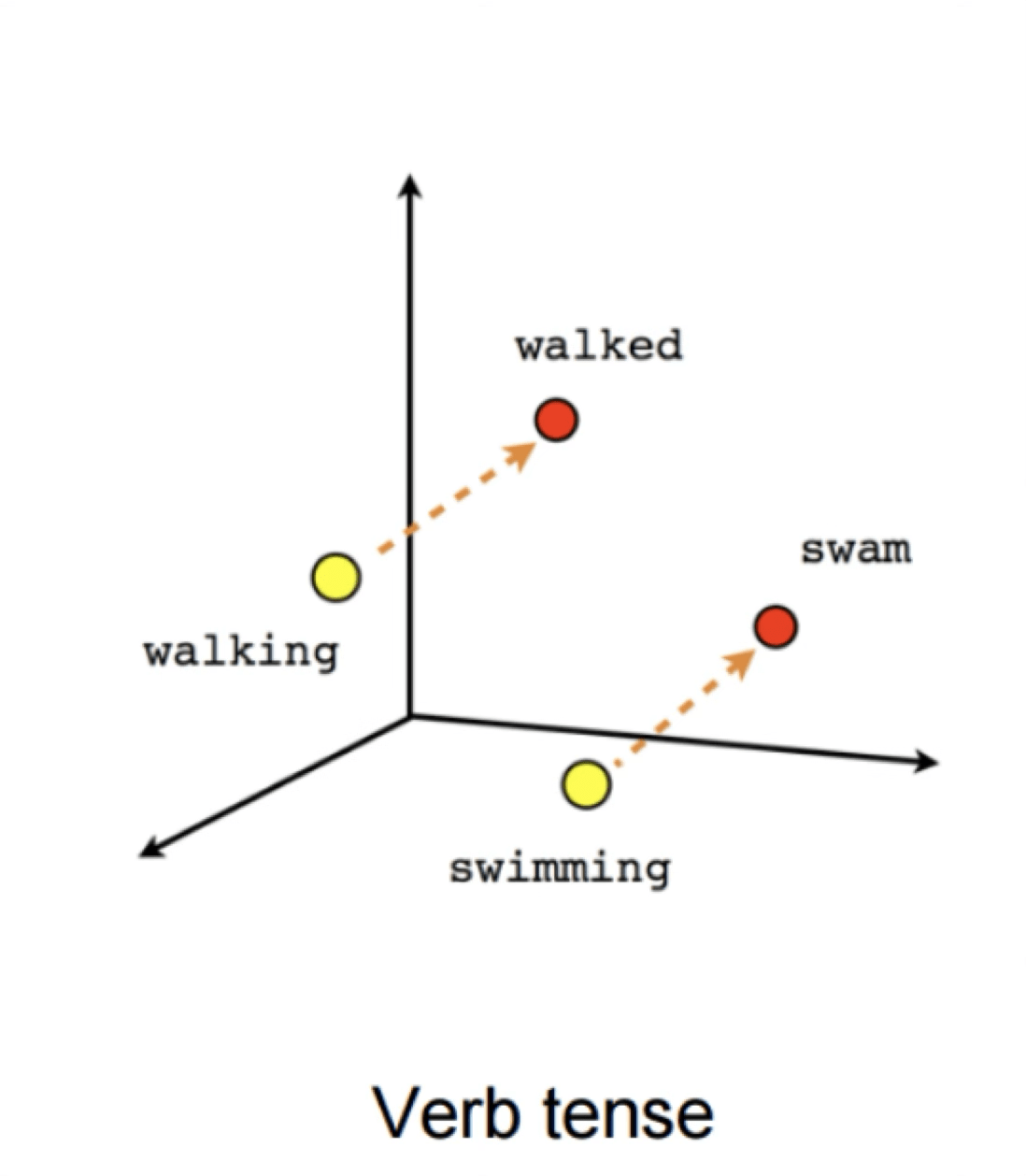
Word2Vec
verb tense
gender
X = Vector(“Paris”) – vector(“France”) + vector(“Italy”) \(\approx\) vector("Rome")
“Meaning is use” — Wittgenstein
Can help downstream tasks:
- sentiment analysis
- machine translation
- info retrieval
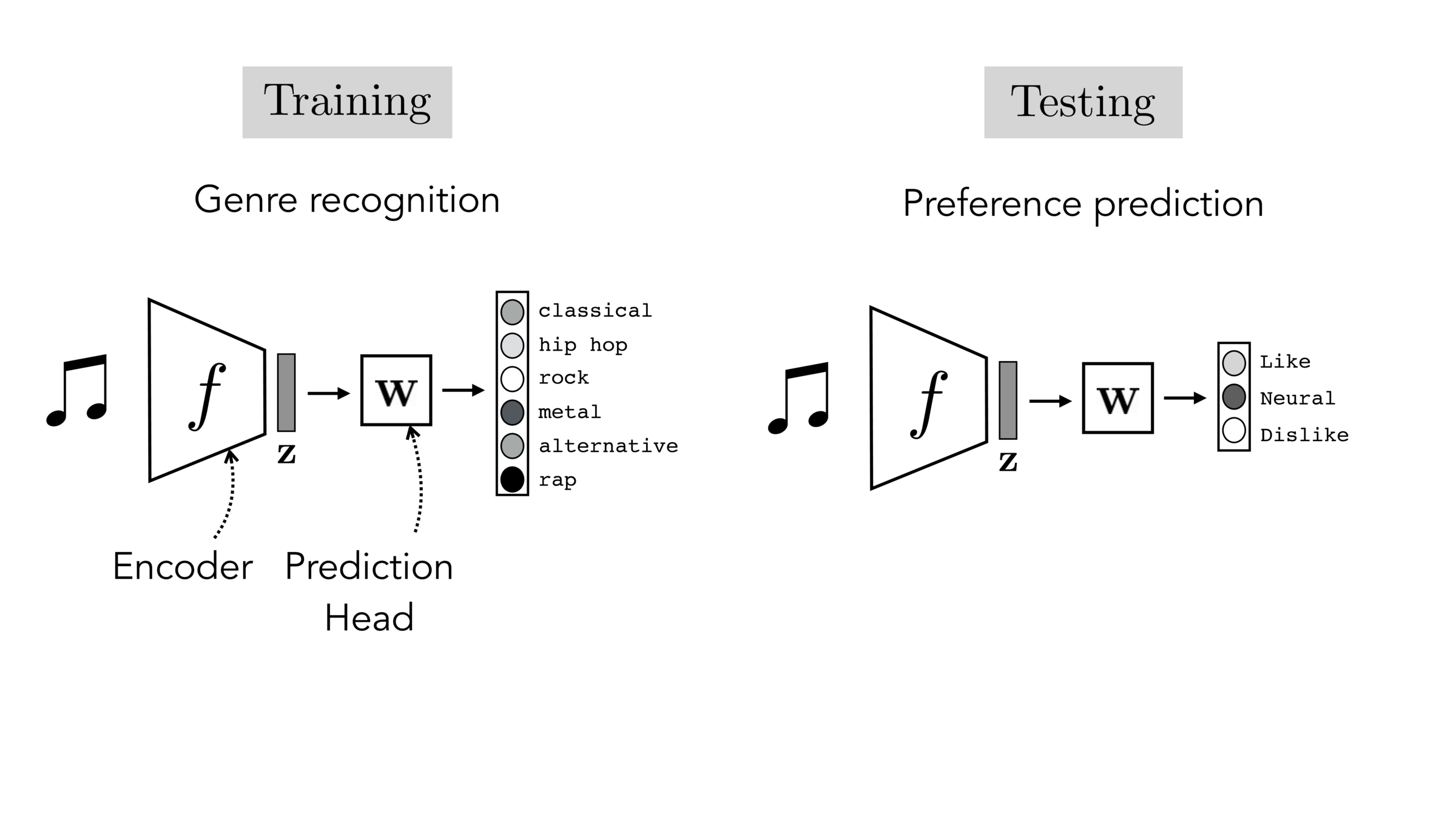
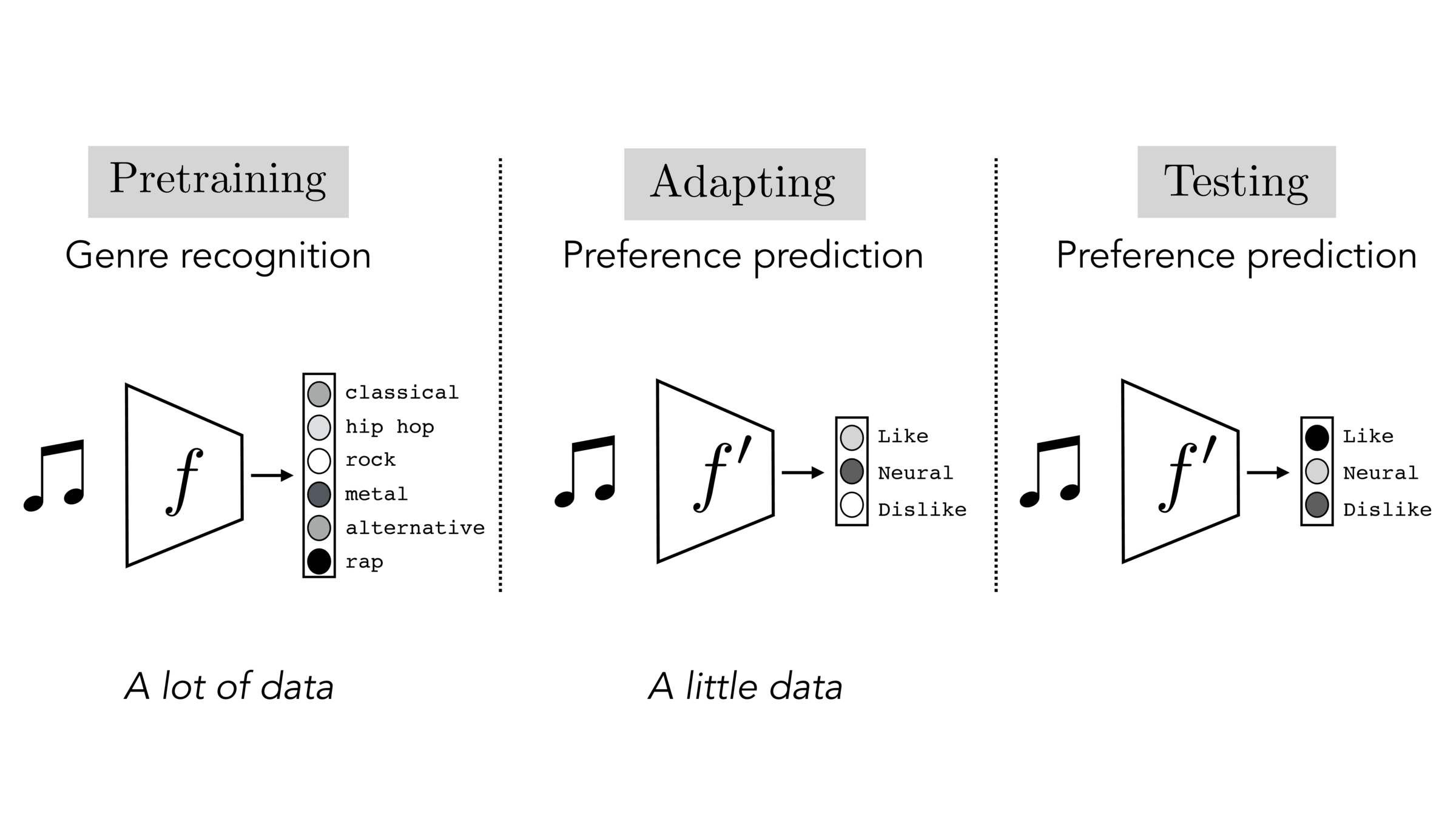
Often, what we will be “tested” on is not what we were trained on.
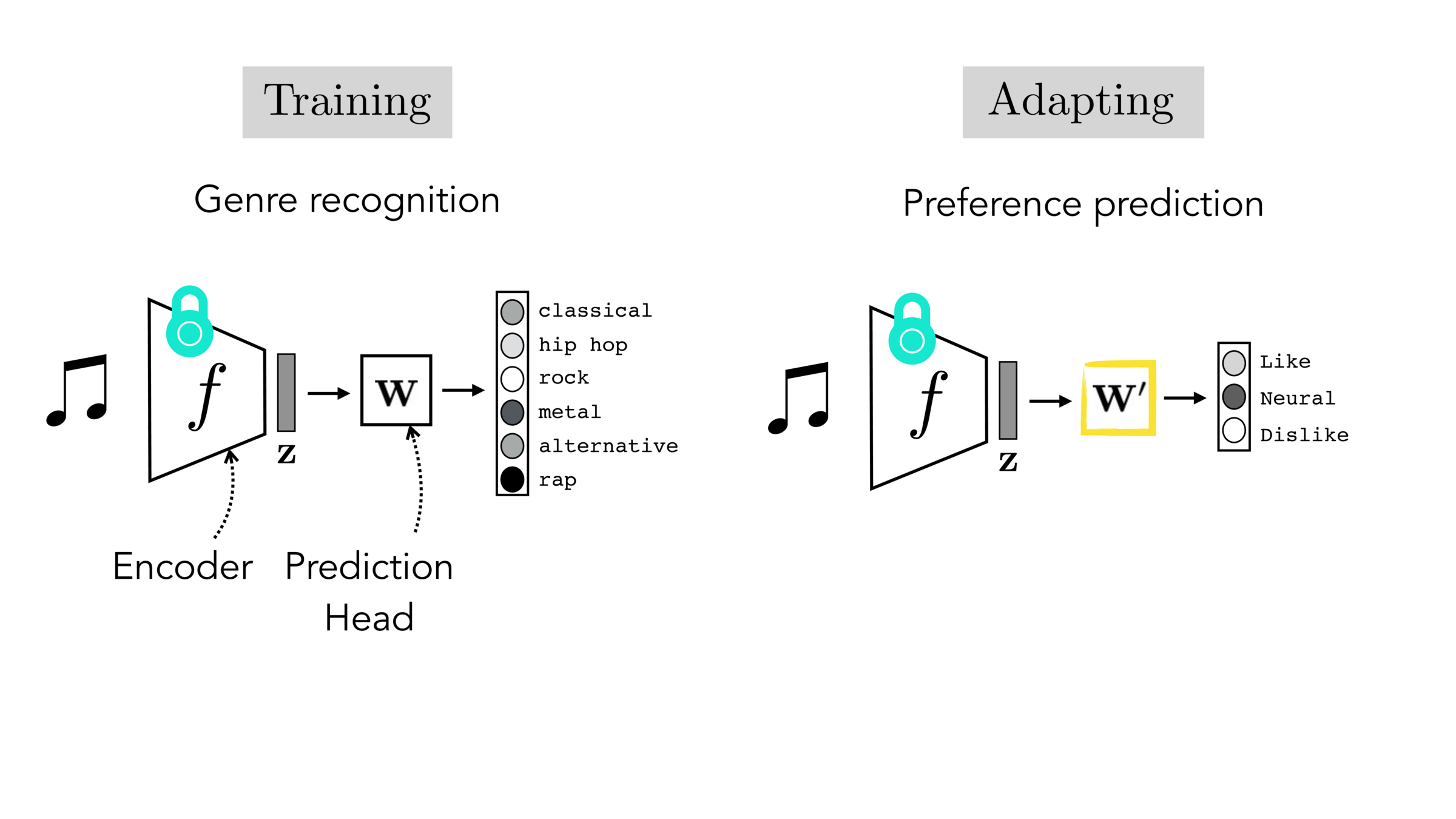
Final-layer adaptation: freeze \(f\), train a new final layer to new target data
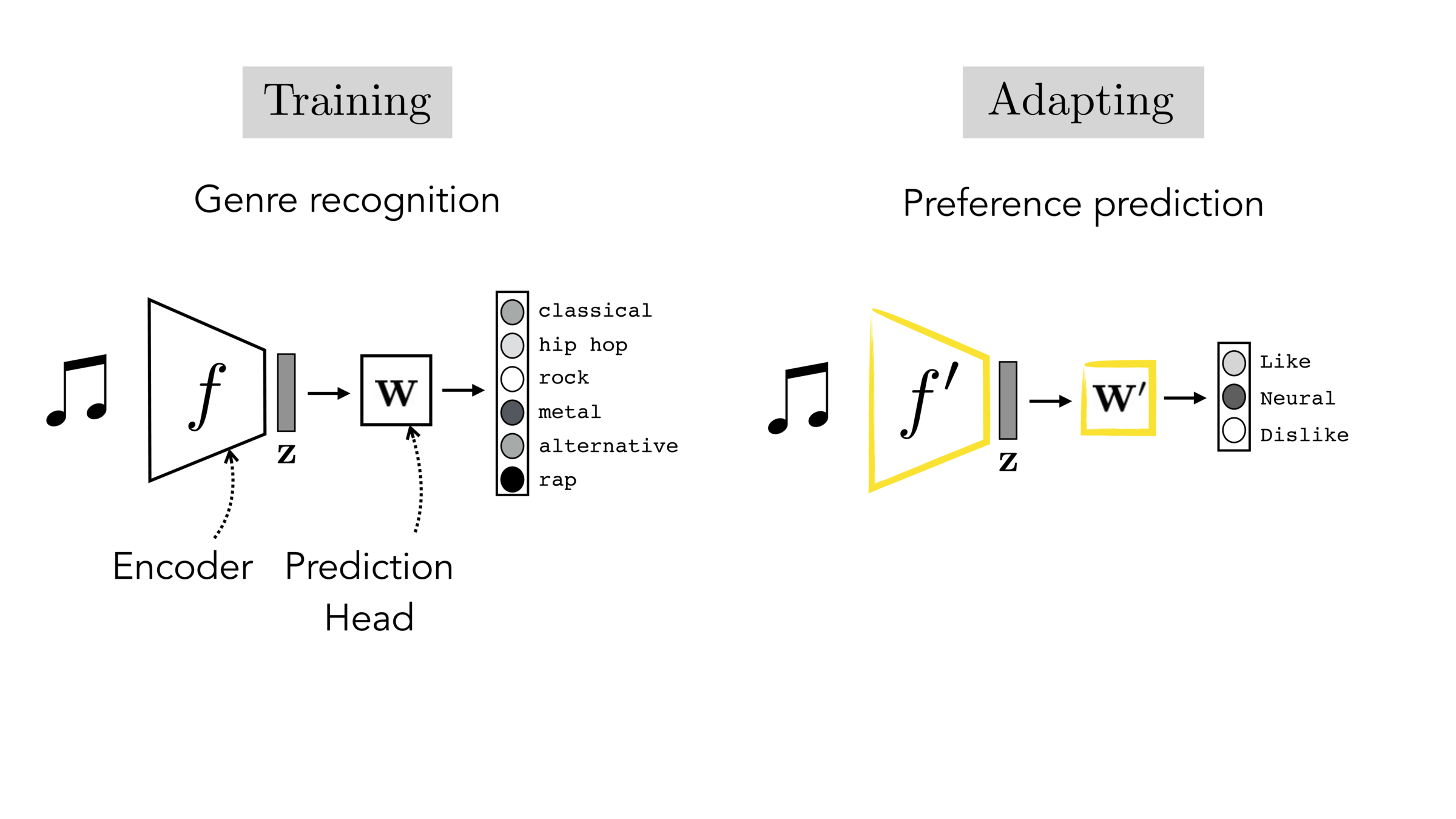
Finetuning: initialize \(f’\) as \(f\), then continue training for \(f'\) as well, on new target data
Outline
- Recap, neural networks mechanism
- Neural networks are representation learners
- Auto-encoder:
- Bottleneck
- Reconstruction
- Unsupervised learning
- (Some recent representation learning ideas)
Feature reconstruction (unsupervised learning)
Features
Reconstructed Features
Label prediction (supervised learning)
Features
Label
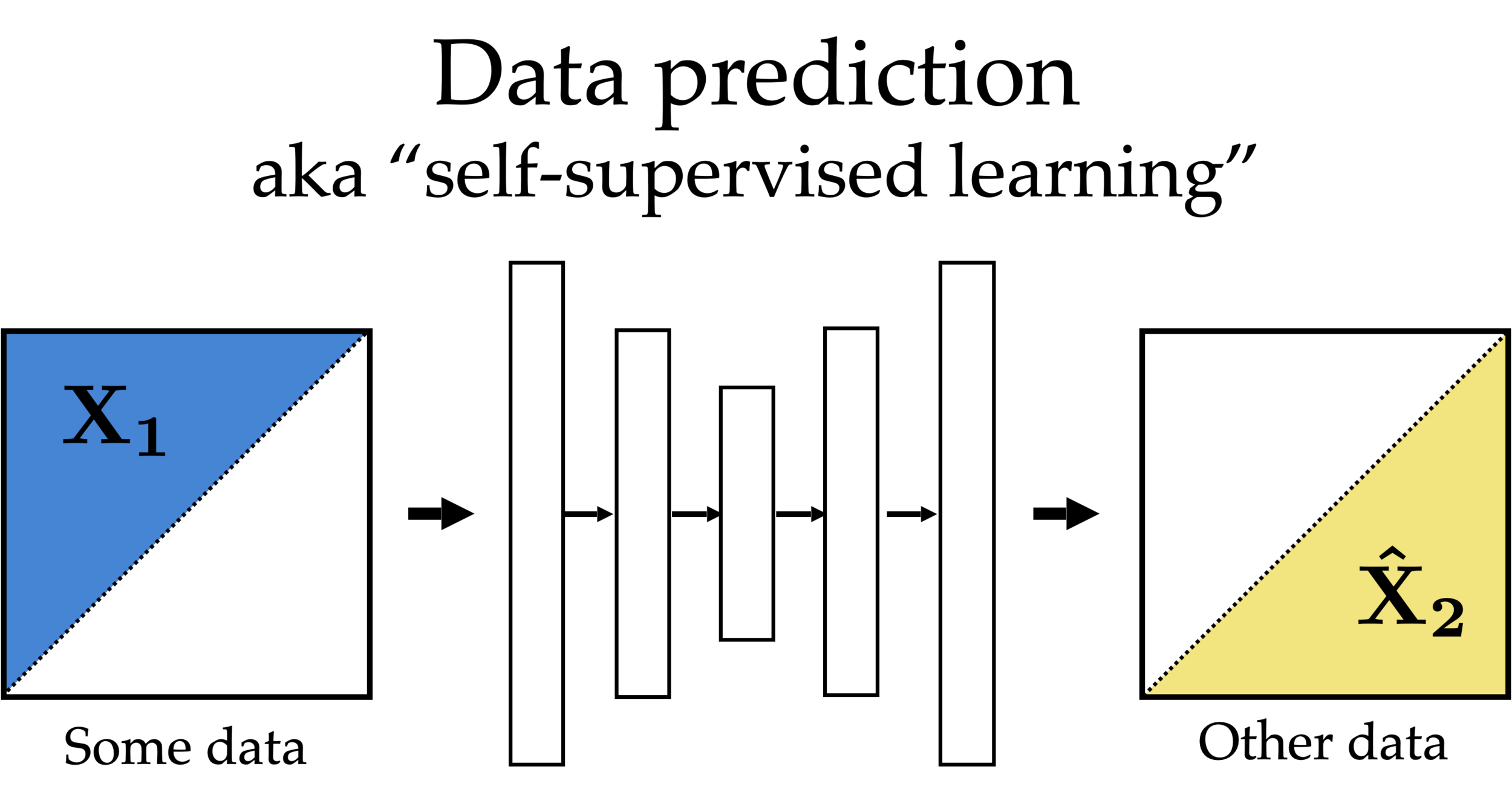
Partial
features
Other partial
features
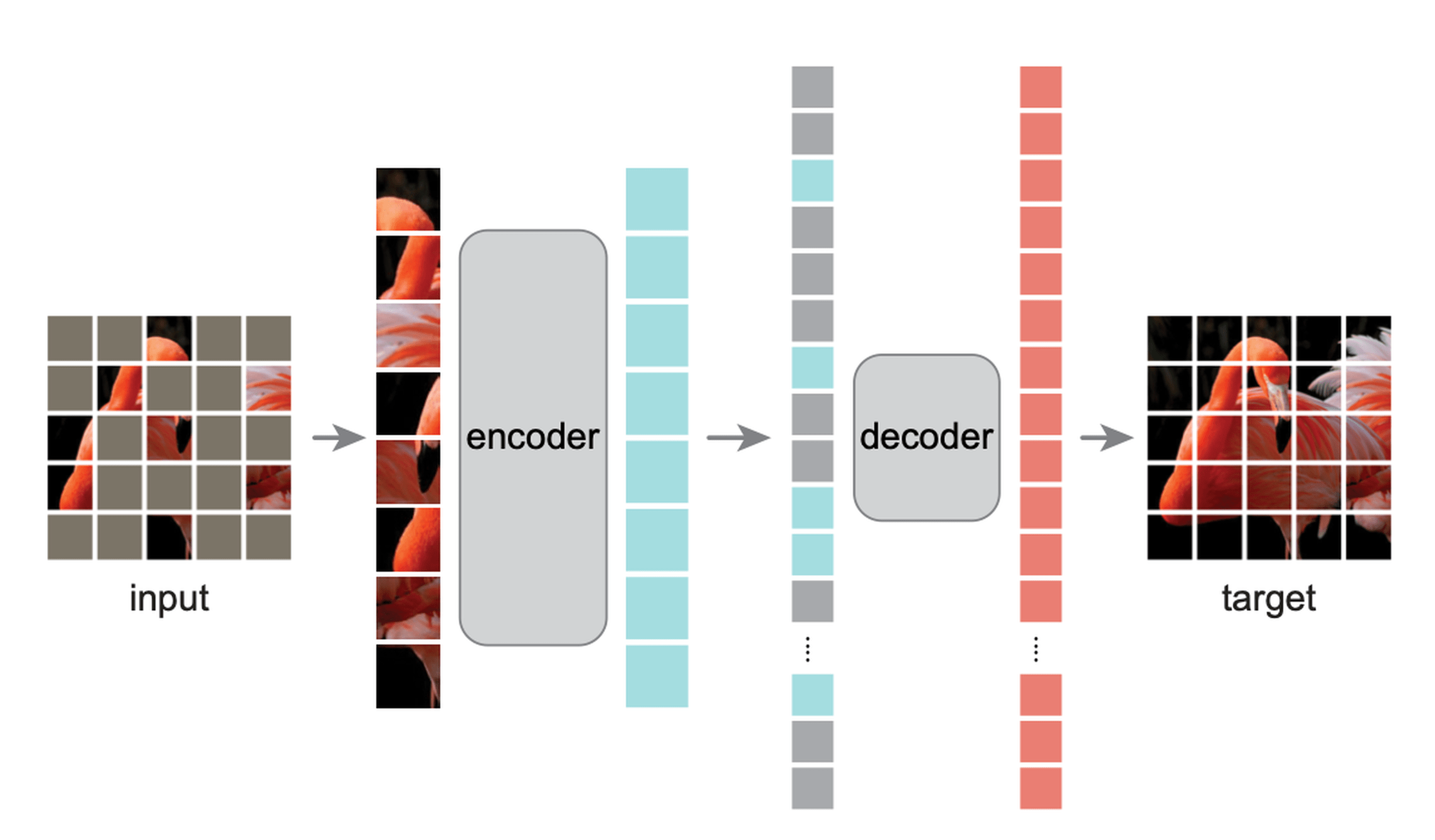
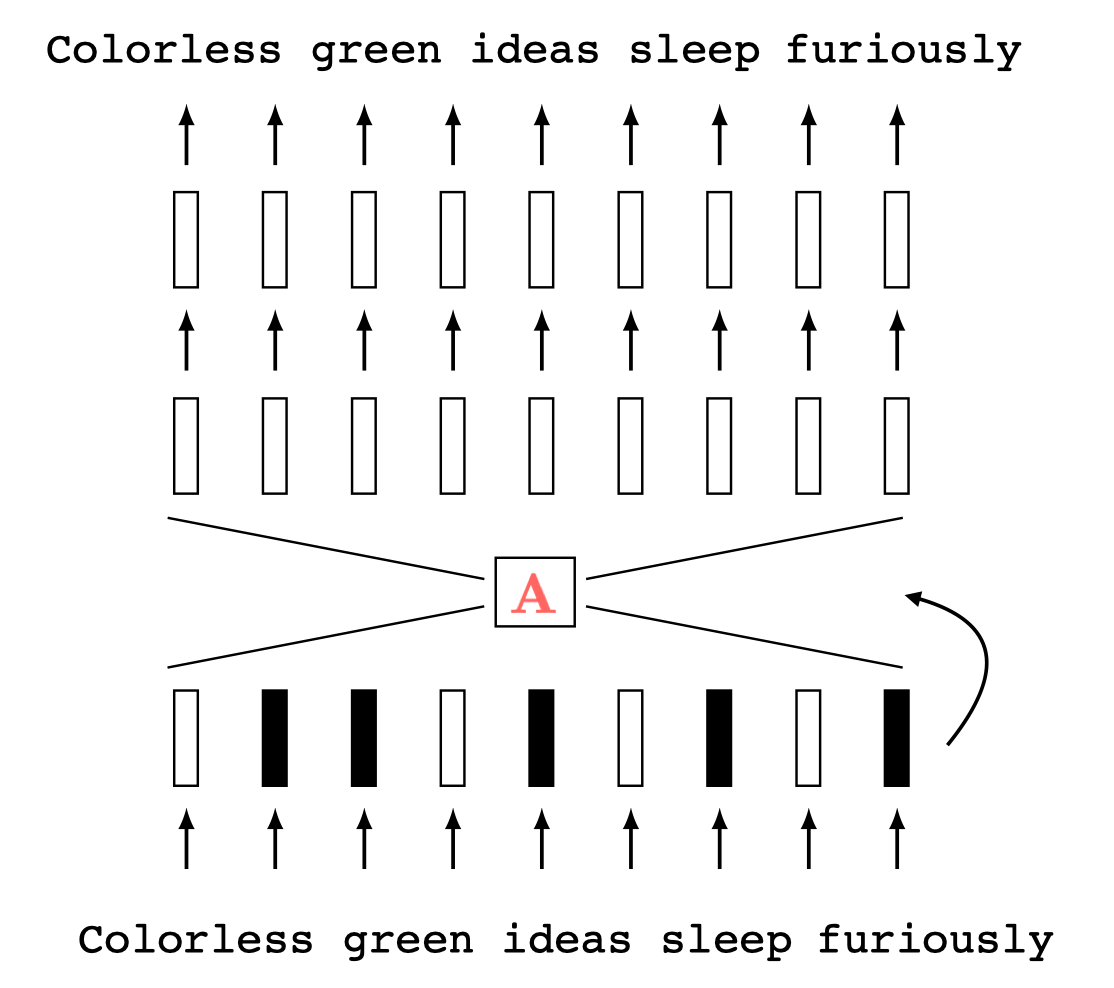
Masked Auto-encoder
[He, Chen, Xie, et al. 2021]
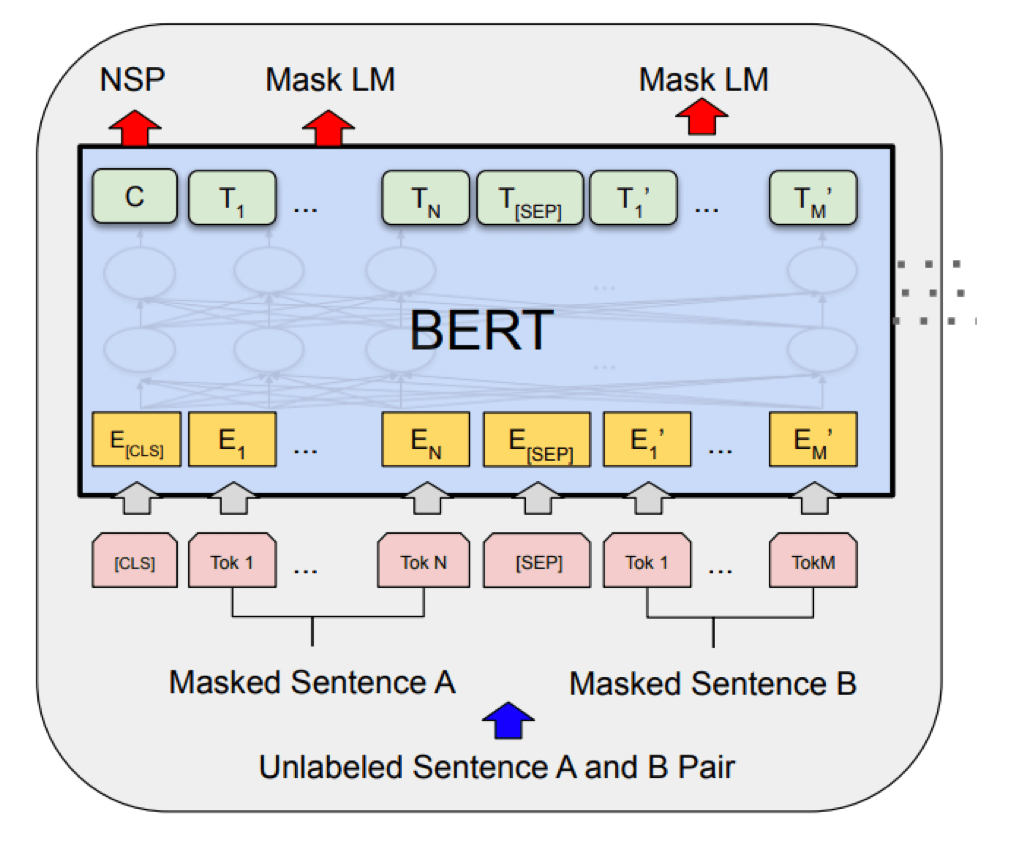
Masked Auto-encoder
[Devlin, Chang, Lee, et al. 2019]

[Zhang, Isola, Efros, ECCV 2016]
predict color from gray-scale
[Zhang, Isola, Efros, ECCV 2016]
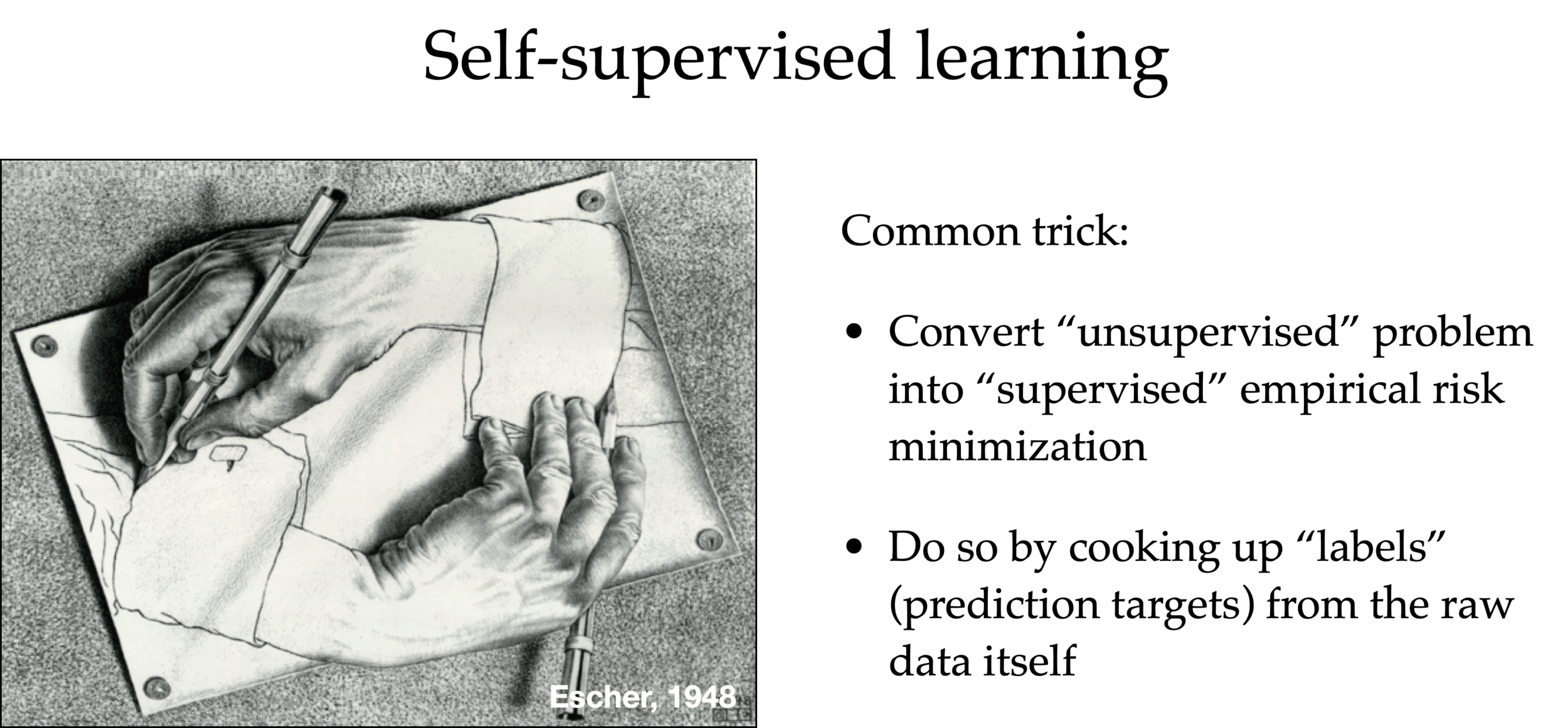
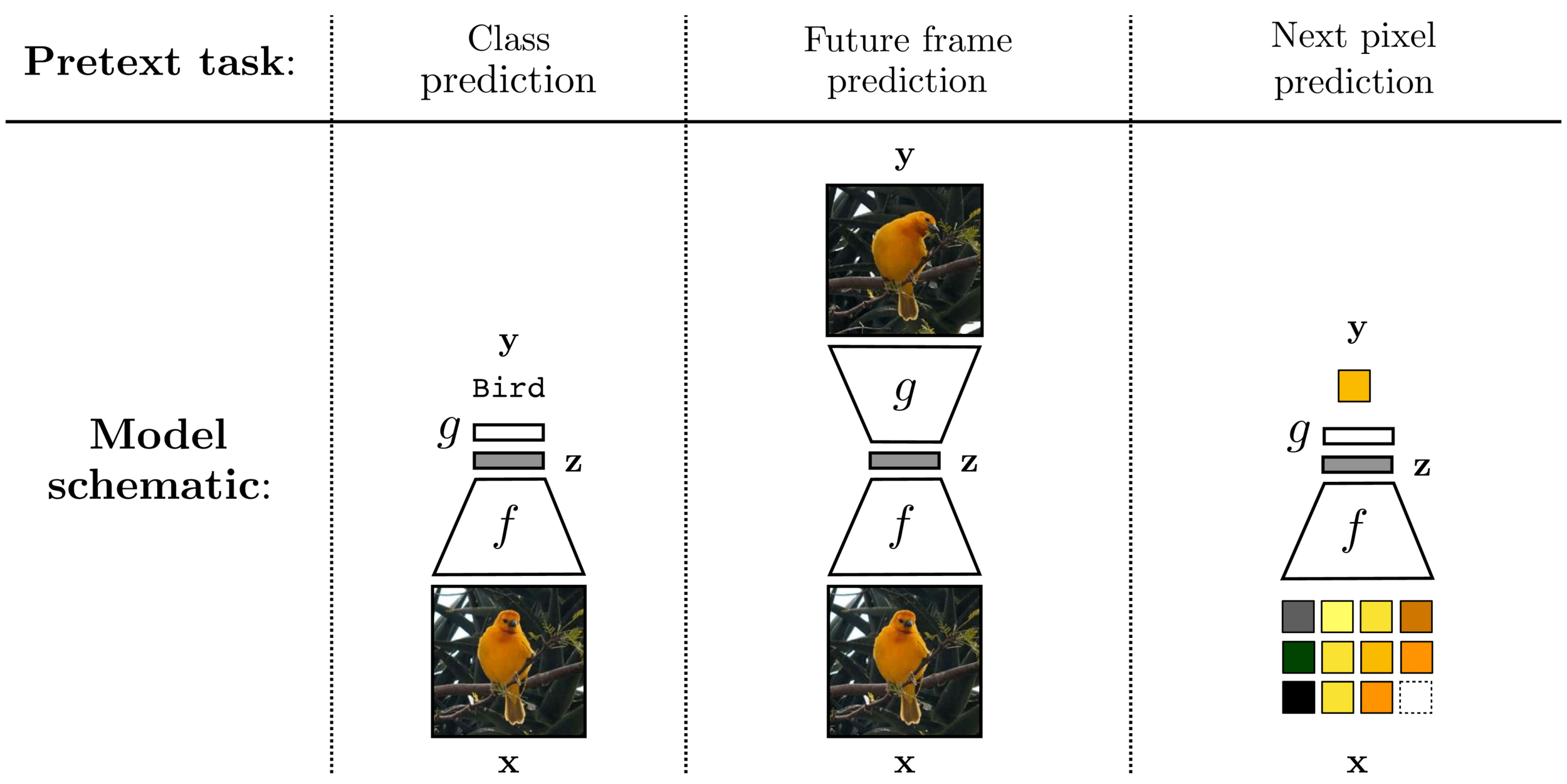
Self-supervised learning
Common trick:
- Convert “unsupervised” problem into “supervised” setup
- Do so by cooking up “labels” (prediction targets) from the raw data itself — called pretext task
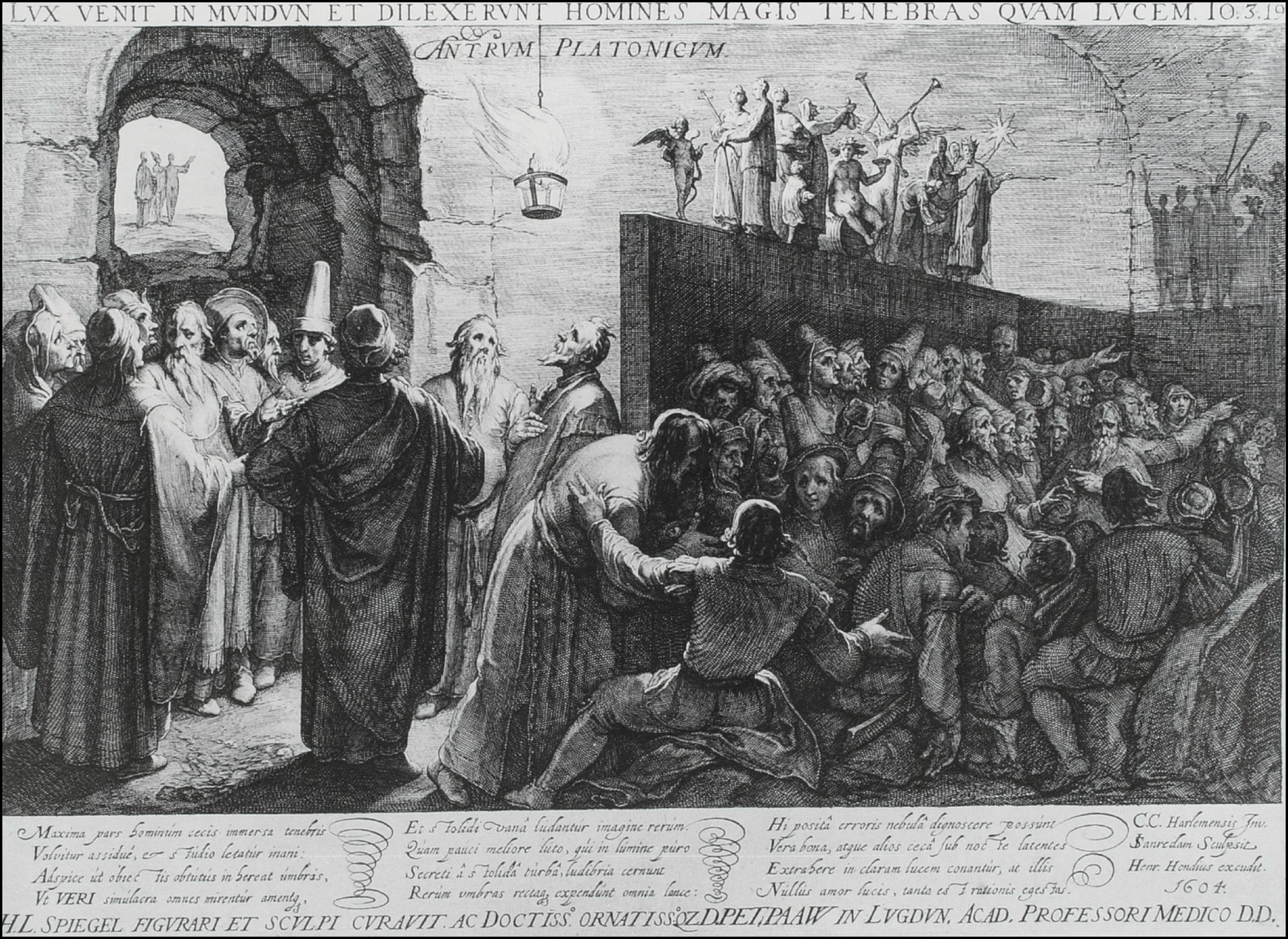

The allegory of the cave

[Slide credit: Andrew Owens]
[Owens et al, Ambient Sound Provides Supervision for Visual Learning, ECCV 2016]
[Slide credit: Andrew Owens]
[Owens et al, Ambient Sound Provides Supervision for Visual Learning, ECCV 2016]
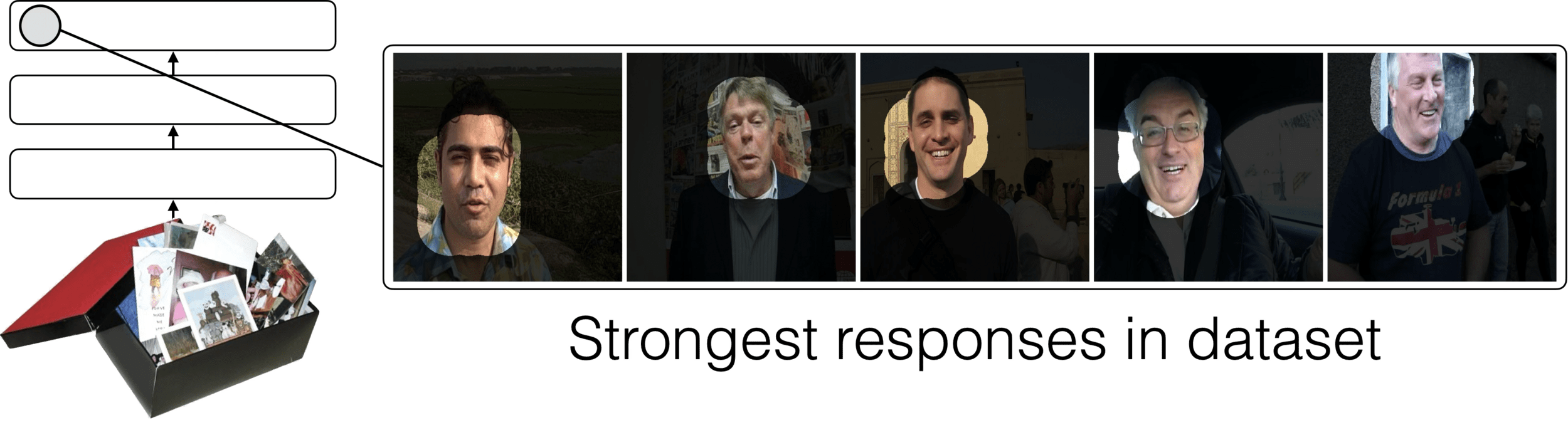
What did the model learn?
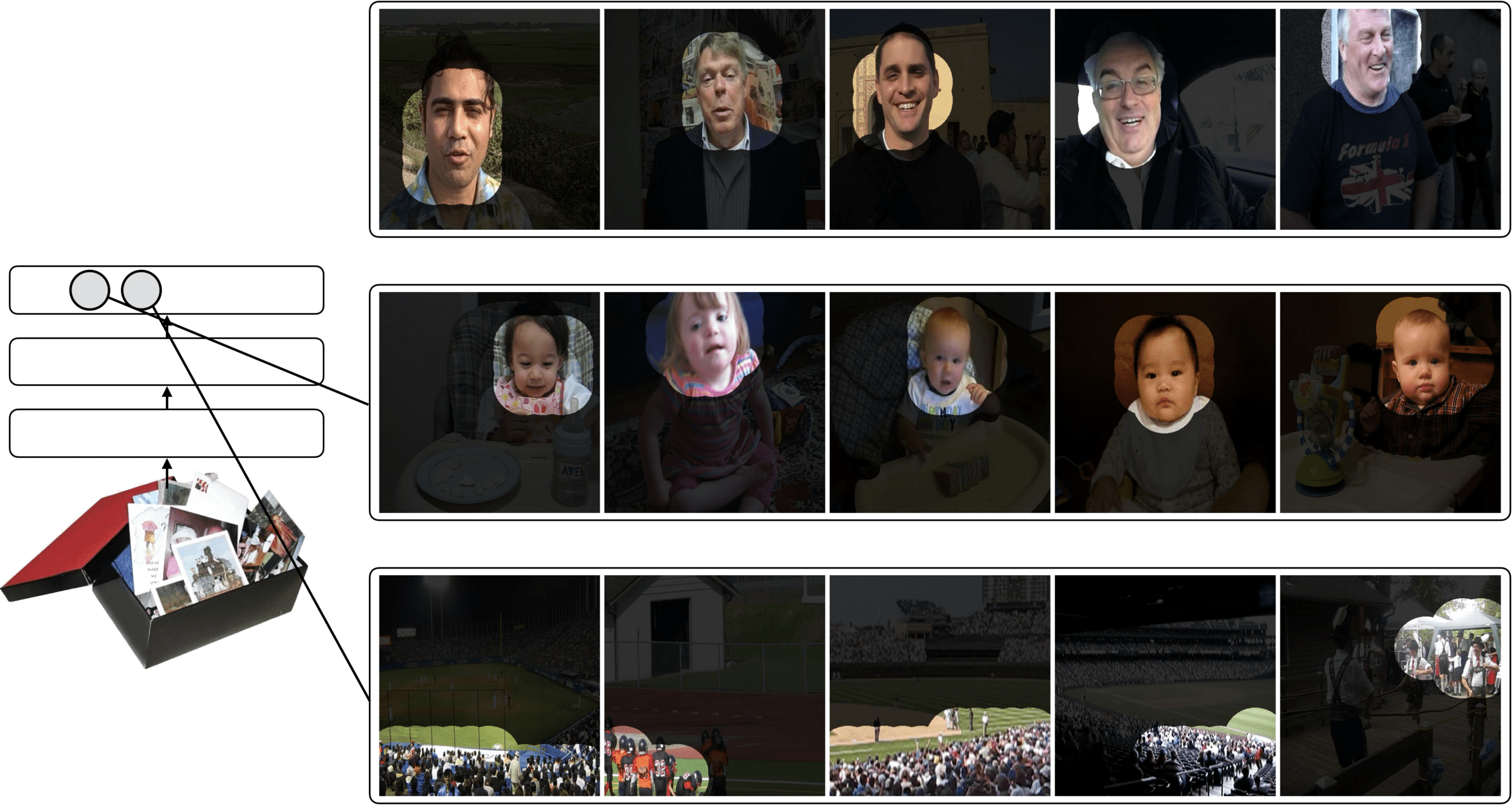
[Slide credit: Andrew Owens]
[Owens et al, Ambient Sound Provides Supervision for Visual Learning, ECCV 2016]
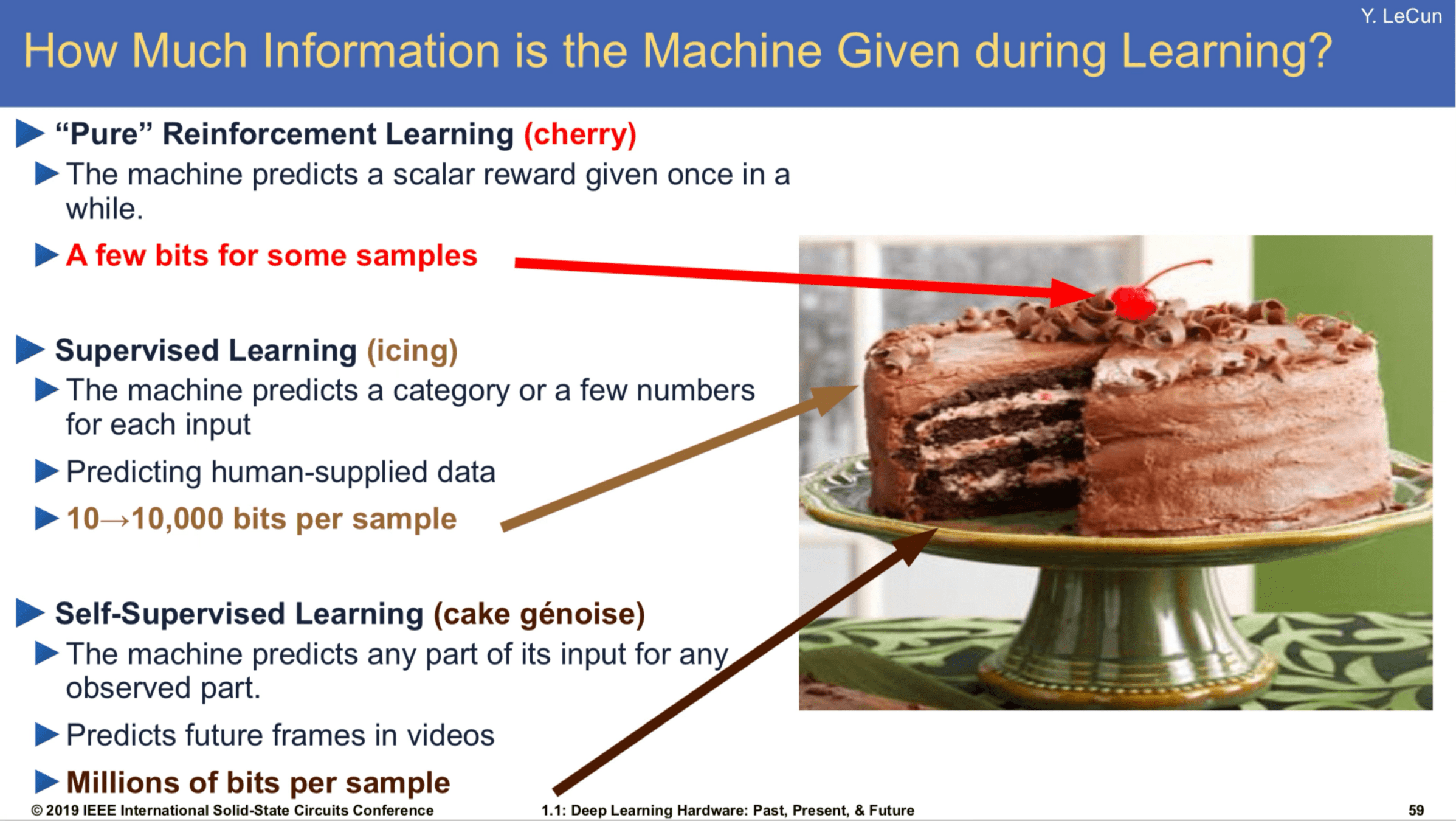
[Slide Credit: Yann LeCun]

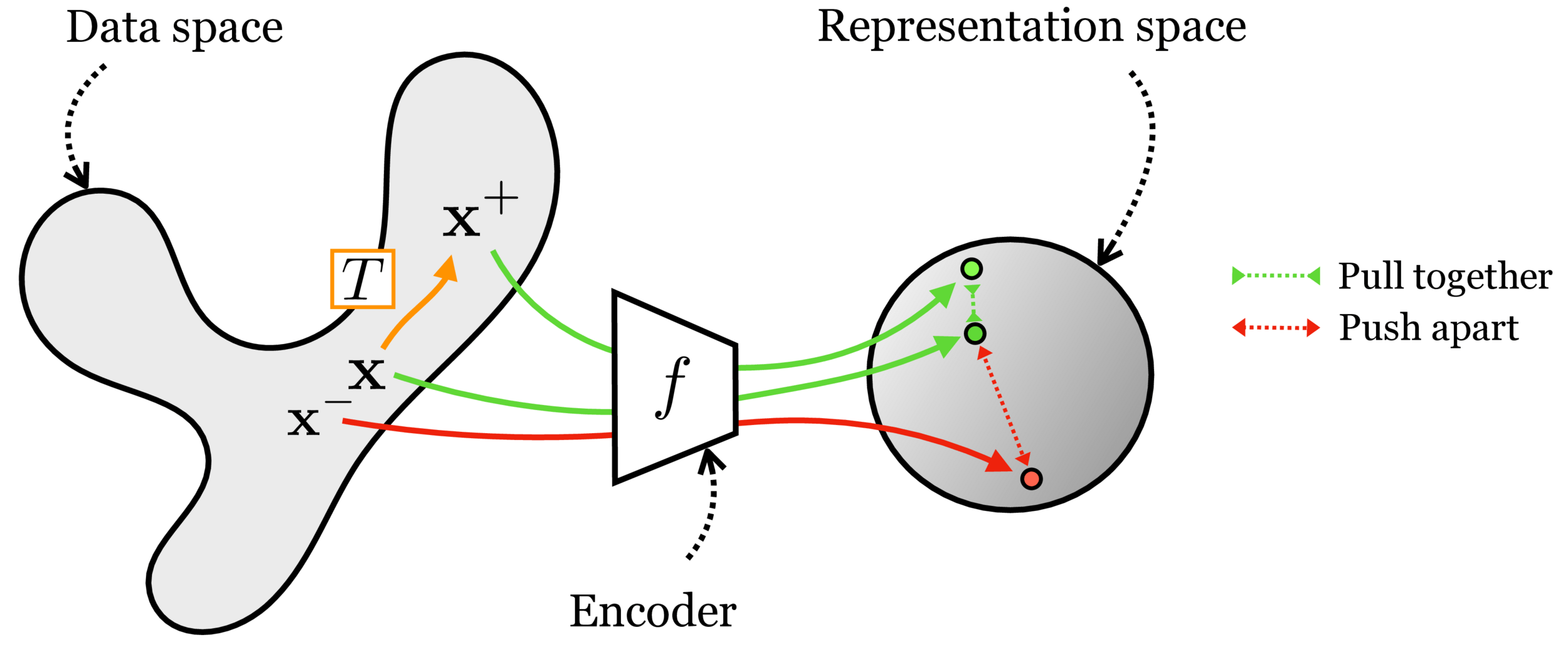
Contrastive learning
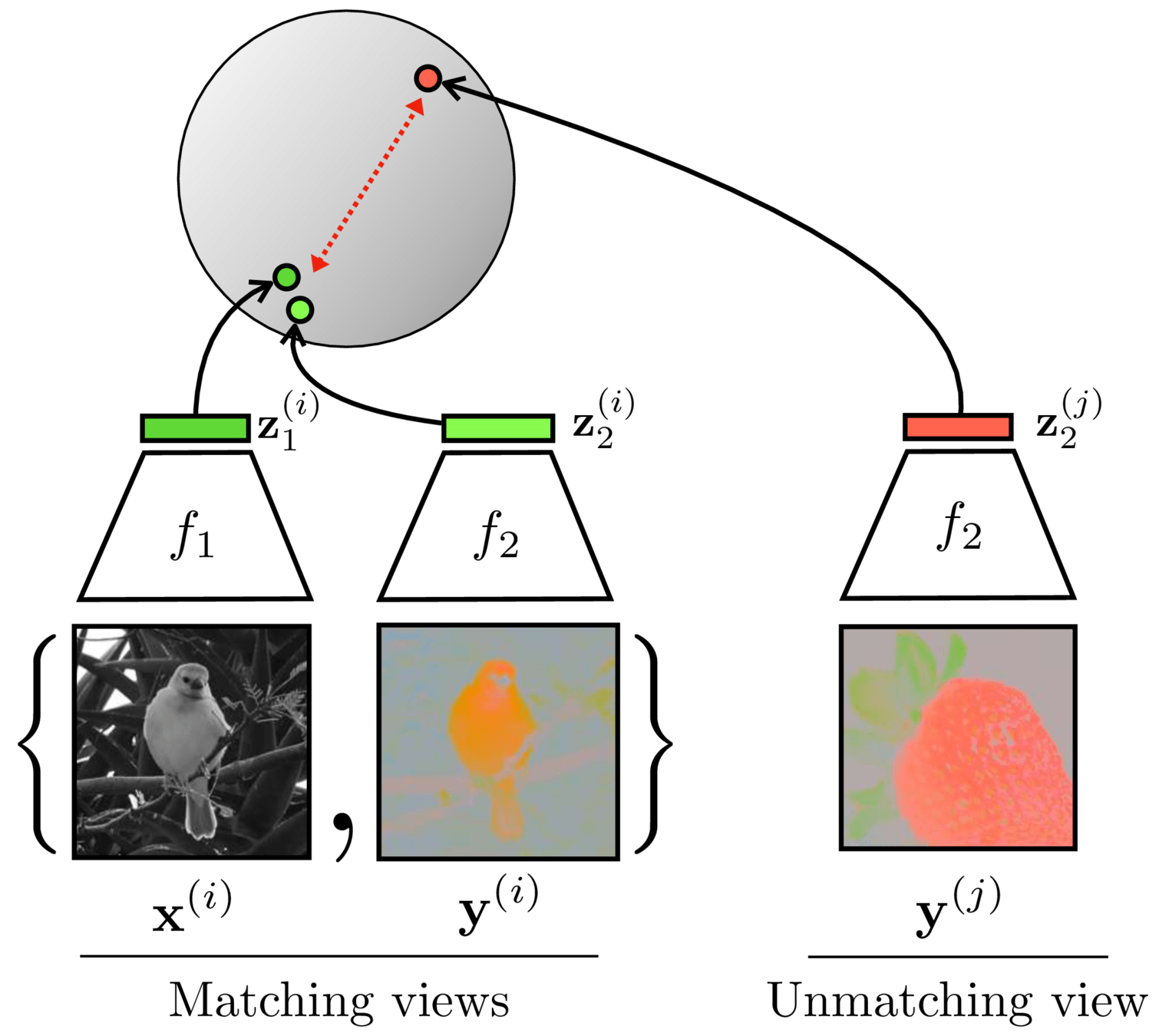
Contrastive learning
[Chen, Kornblith, Norouzi, Hinton, ICML 2020]
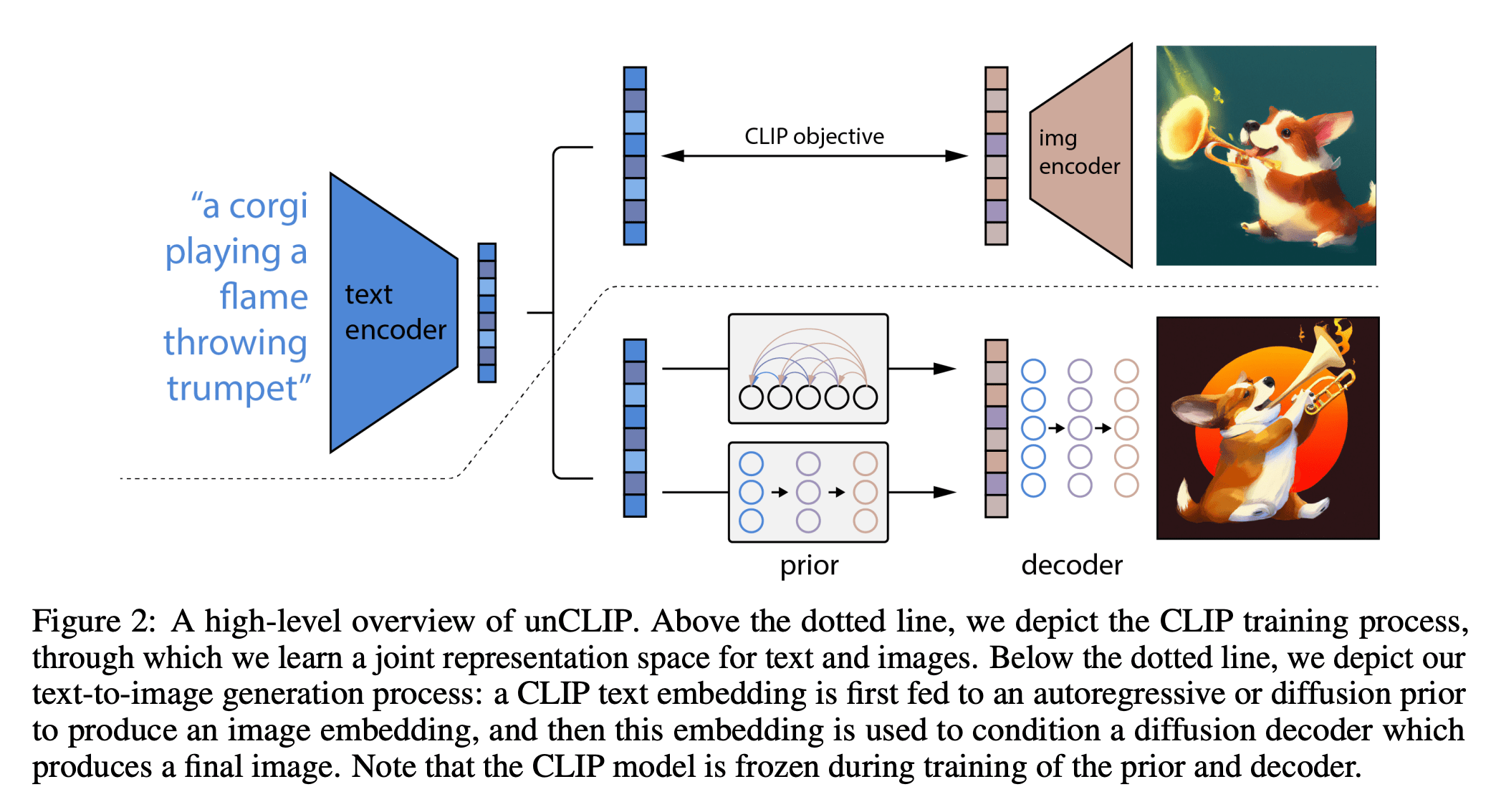
[https://arxiv.org/pdf/2204.06125.pdf]
DallE
Summary
- We looked at the mechanics of neural net last time. Today we see deep nets learn representations, just like our brains do.
- This is useful because representations transfer — they act as prior knowledge that enables quick learning on new tasks.
- Representations can also be learned without labels, e.g. as we do in unsupervised, or self-supervised learning. This is great since labels are expensive and limiting.
- Without labels there are many ways to learn representations. We saw today:
- representations as compressed codes, auto-encoder with bottleneck
- (representations that are shared across sensory modalities)
- (representations that are predictive of their context)
Thanks!
We'd love to hear your thoughts.