
Lecture 7: Neural Networks II, Auto-encoders
Shen Shen
October 11, 2024
Intro to Machine Learning
(slides adapted from Phillip Isola)
Outline
- Recap, neural networks mechanism
- Neural networks are representation learners
- Auto-encoder:
- Bottleneck
- Reconstruction
- Unsupervised learning
- (Some recent representation learning ideas)
x^{(1)}
y^{(1)}
f^1
linear combination
nonlinear activation
\begin{aligned}
& W^1 \\
\end{aligned}
\begin{aligned}
& W^2 \\
\end{aligned}
\begin{aligned}
& W^L \\
\end{aligned}
f^2
f^L
g^{(1)}
\(\dots\)
f^2\left(\hspace{2cm}; \mathbf{W}^2\right)
f^1(\mathbf{x}^{(i)}; \mathbf{W}^1)
f^L\left(\dots \hspace{3.5cm}; \dots \mathbf{W}^L\right)
Forward pass: evaluate, given the current parameters,
- the model output \(g^{(i)}\) =
- the loss incurred on the current data \(\mathcal{L}(g^{(i)}, y^{(i)})\)
- the training error \(J = \frac{1}{n} \sum_{i=1}^{n}\mathcal{L}(g^{(i)}, y^{(i)})\)
\mathcal{L}(g^{(1)}, y^{(1)})
\mathcal{L}(g, y)
\mathcal{L}(g^{(n)}, y^{(n)})
\underbrace{\quad \quad \quad \quad \quad } \\ n
\dots
\dots
\dots
loss function
Recap:
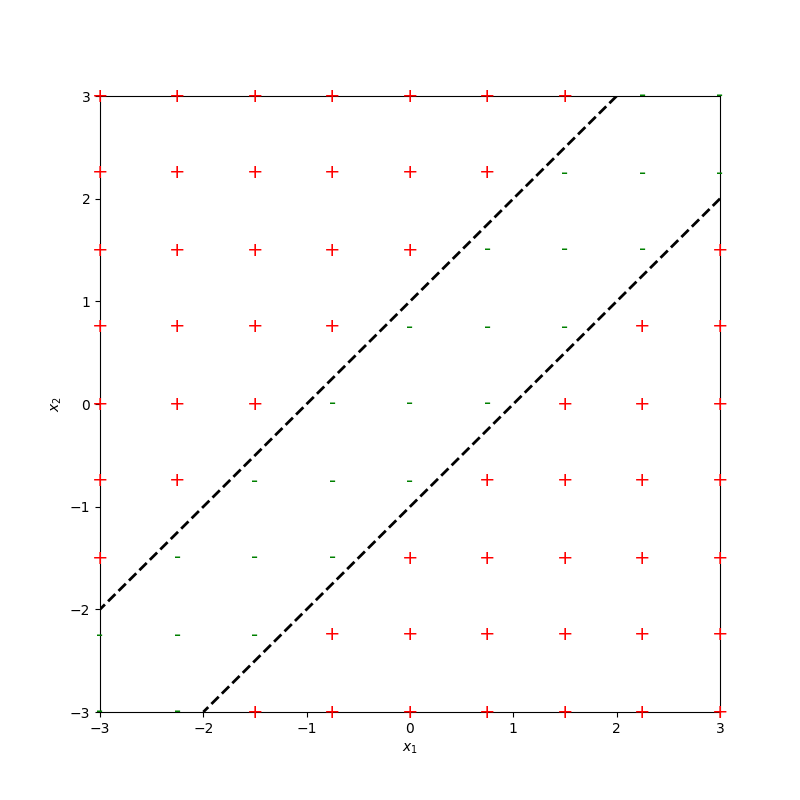
compositions of ReLU(s) can be quite expressive

in fact, asymptotically, can approximate any function!
(image credit: Phillip Isola)
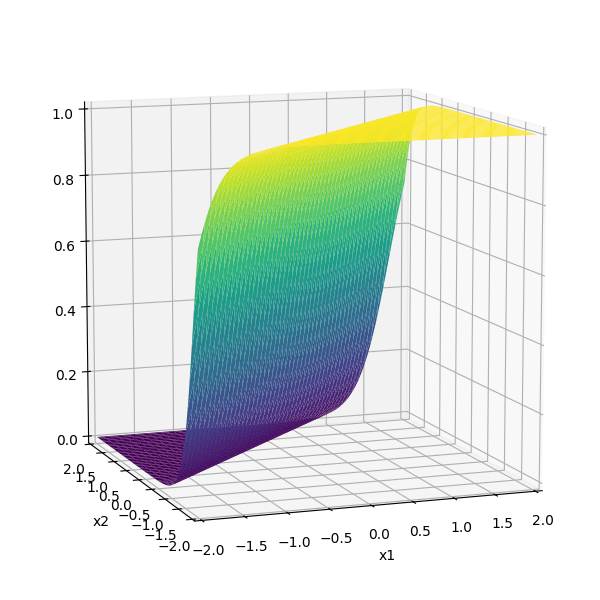
\sigma_1 = \sigma(5 x_1 + -5 x_2 + 1)
\sigma_2 = \sigma(-5 x_1 + 5 x_2 + 1)
some weighted sum
Recap:
- Randomly pick a data point \((x^{(i)}, y^{(i)})\)
- Evaluate the gradient \(\nabla_{W^2} \mathcal{L(g^{(i)},y^{(i)})}\)
- Update the weights \(W^2 \leftarrow W^2 - \eta \nabla_{W^2} \mathcal{L(g^{(i)},y^{(i)}})\)
x^{(i)}
y^{(i)}
f^1
\begin{aligned}
& W^1 \\
\end{aligned}
\begin{aligned}
& W^2 \\
\end{aligned}
\begin{aligned}
& W^L \\
\end{aligned}
f^2
f^L
g^{(i)}
\(\dots\)
\mathcal{L}(g^{(i)}, y^{(i)})
\mathcal{L}(g, y)
\mathcal{L}(g^{(n)}, y^{(n)})
\underbrace{\quad \quad \quad \quad \quad } \\ n
\dots
\dots
\dots
Backward pass: run SGD to update the parameters, e.g. to update \(W^2\)

\(\nabla_{W^2} \mathcal{L(g^{(i)},y^{(i)})}\)
Recap:
x
\(\dots\)
y
f^1
\begin{aligned}
& W^1 \\
\end{aligned}
\begin{aligned}
& W^2 \\
\end{aligned}
\begin{aligned}
& W^L \\
\end{aligned}
f^2
f^L
\mathcal{L}(g,y)
g
Z^L
A^2
Z^2
A^1
Z^1
\frac{\partial \mathcal{L}(g,y)}{\partial g}
\frac{\partial g}{\partial Z^{L}}
\frac{\partial Z^3}{\partial A^{2}}\frac{\partial A^4}{\partial Z^{3}} \dots \frac{\partial Z^L}{\partial A^{L-1}}
\frac{\partial A^2}{\partial Z^{2}}
\frac{\partial \mathcal{L}(g,y)}{\partial Z^2}
\underbrace{\hspace{4cm}}
\underbrace{\hspace{4.7cm}}
\frac{\partial Z^2}{\partial W^{2}}
\frac{\partial \mathcal{L}(g,y)}{\partial W^2}
Recap:
back propagation: reuse of computation
\underbrace{\hspace{6.5cm}}
\frac{\partial Z^2}{\partial A^{1}}
\frac{\partial A^1}{\partial Z^{1}}
\frac{\partial Z^1}{\partial W^{1}}
x
\(\dots\)
y
f^1
\begin{aligned}
& W^1 \\
\end{aligned}
\begin{aligned}
& W^2 \\
\end{aligned}
\begin{aligned}
& W^L \\
\end{aligned}
f^2
f^L
\mathcal{L}(g,y)
g
Z^L
A^2
Z^2
A^1
Z^1
\frac{\partial \mathcal{L}(g,y)}{\partial g}
\frac{\partial g}{\partial Z^{L}}
\frac{\partial Z^3}{\partial A^{2}}\frac{\partial A^4}{\partial Z^{3}} \dots \frac{\partial Z^L}{\partial A^{L-1}}
\frac{\partial A^2}{\partial Z^{2}}
\frac{\partial \mathcal{L}(g,y)}{\partial Z^2}
\underbrace{\hspace{4cm}}
\frac{\partial \mathcal{L}(g,y)}{\partial W^1}
\underbrace{\hspace{4.7cm}}
\frac{\partial Z^2}{\partial W^{2}}
\frac{\partial \mathcal{L}(g,y)}{\partial W^2}
back propagation: reuse of computation
Recap:
Outline
- Recap, neural networks mechanism
- Neural networks are representation learners
- Auto-encoder:
- Bottleneck
- Reconstruction
- Unsupervised learning
- (Some recent representation learning ideas)
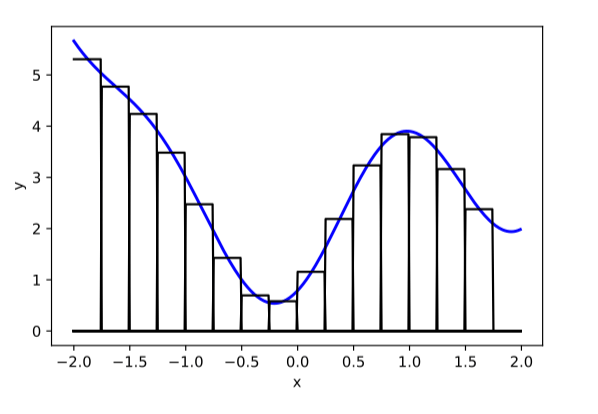
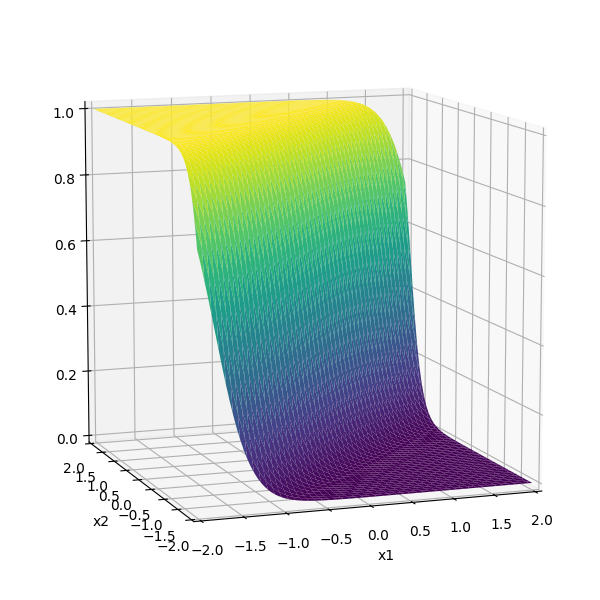
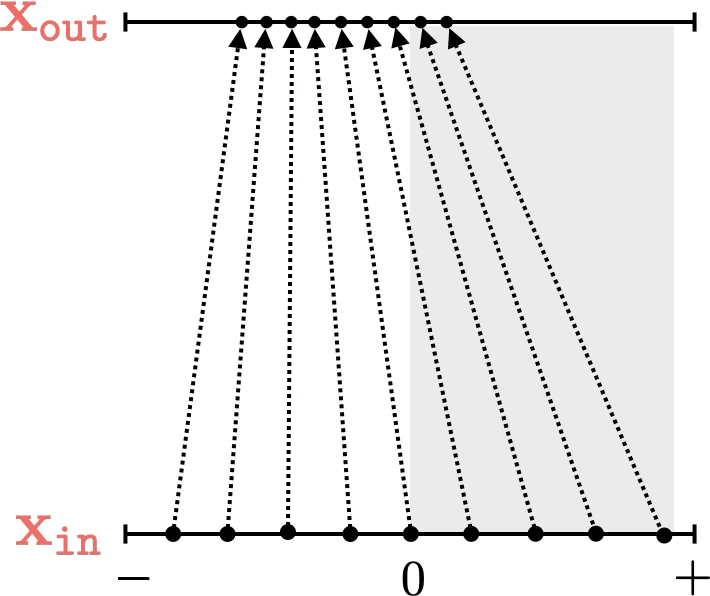
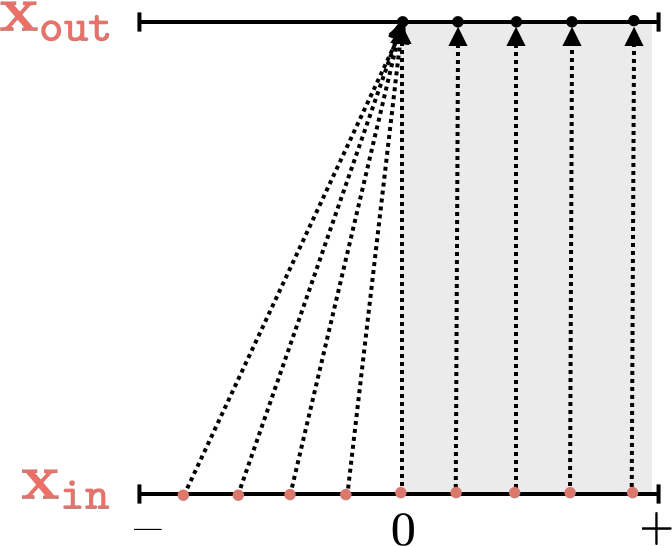
Two different ways to visualize a function
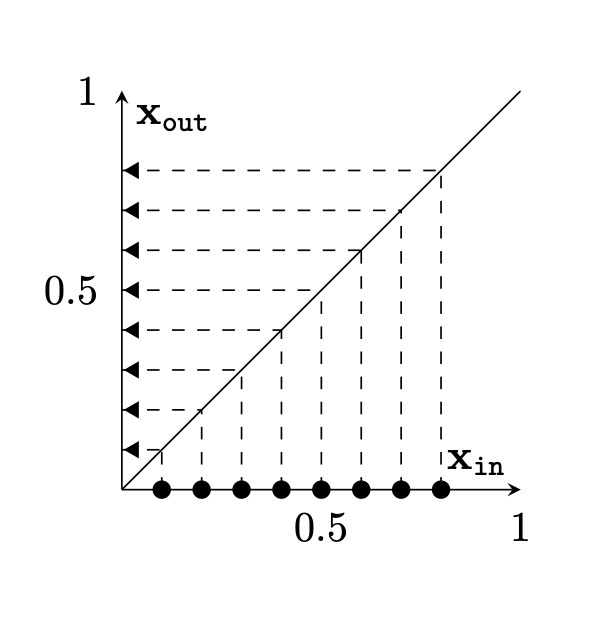
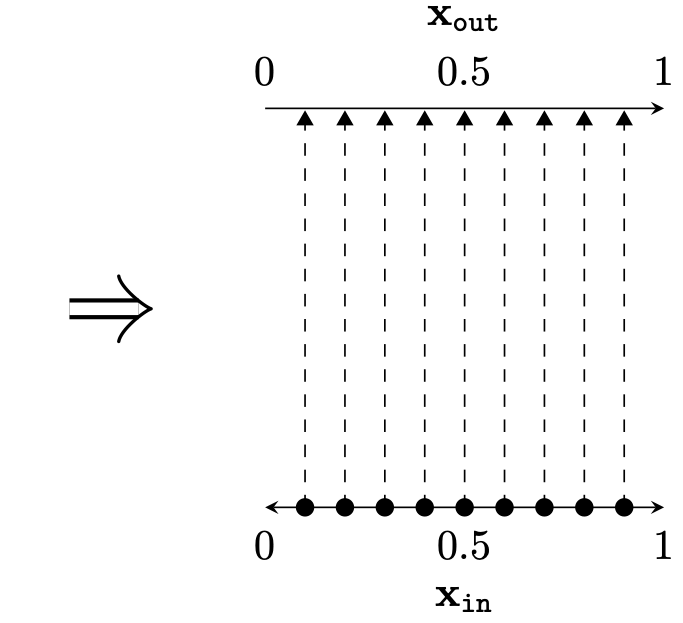
Two different ways to visualize a function
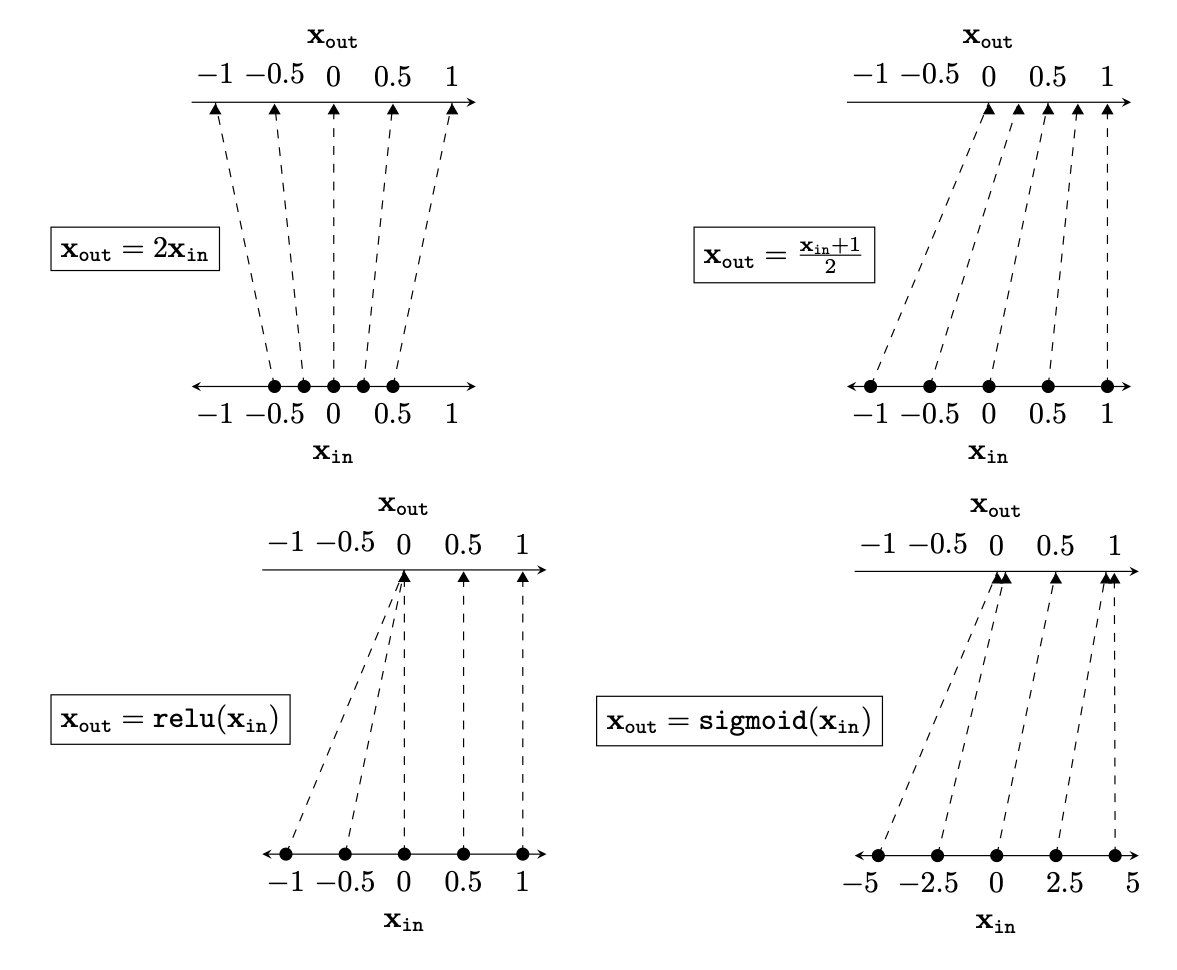
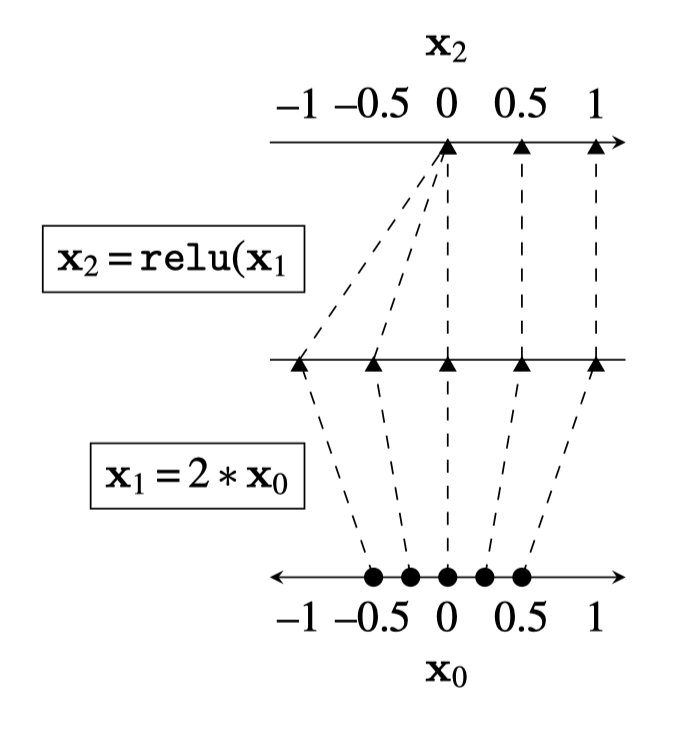
Representation transformations for a variety of neural net operations
and stack of neural net operations
)

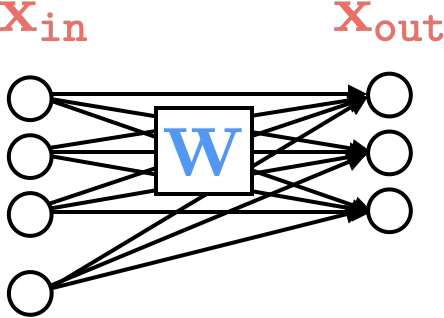
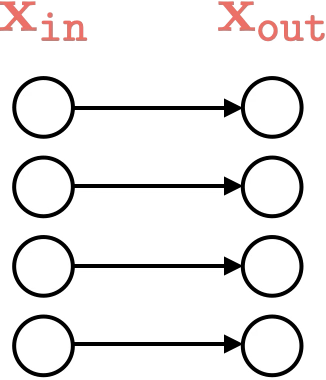
wiring graph
equation
mapping 1D
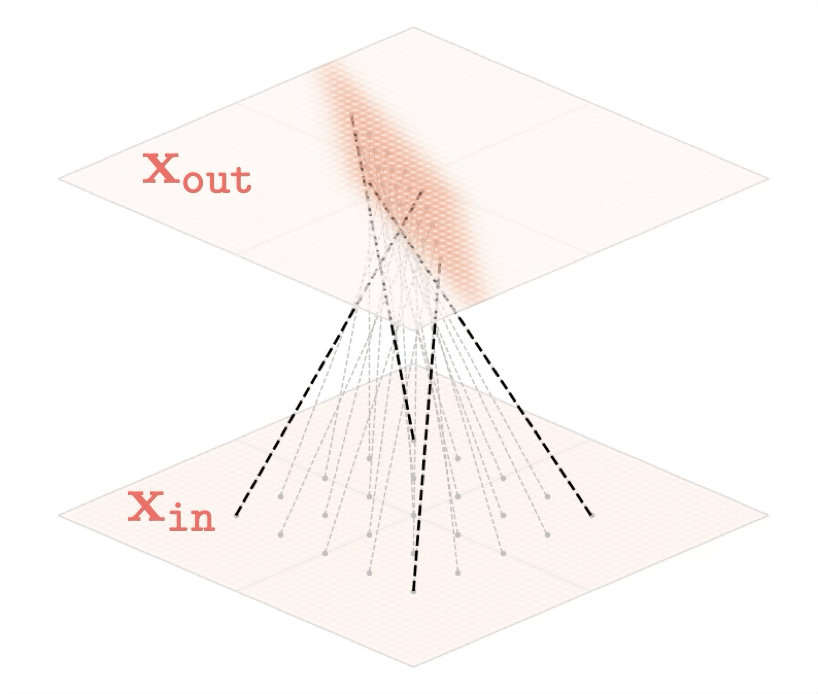
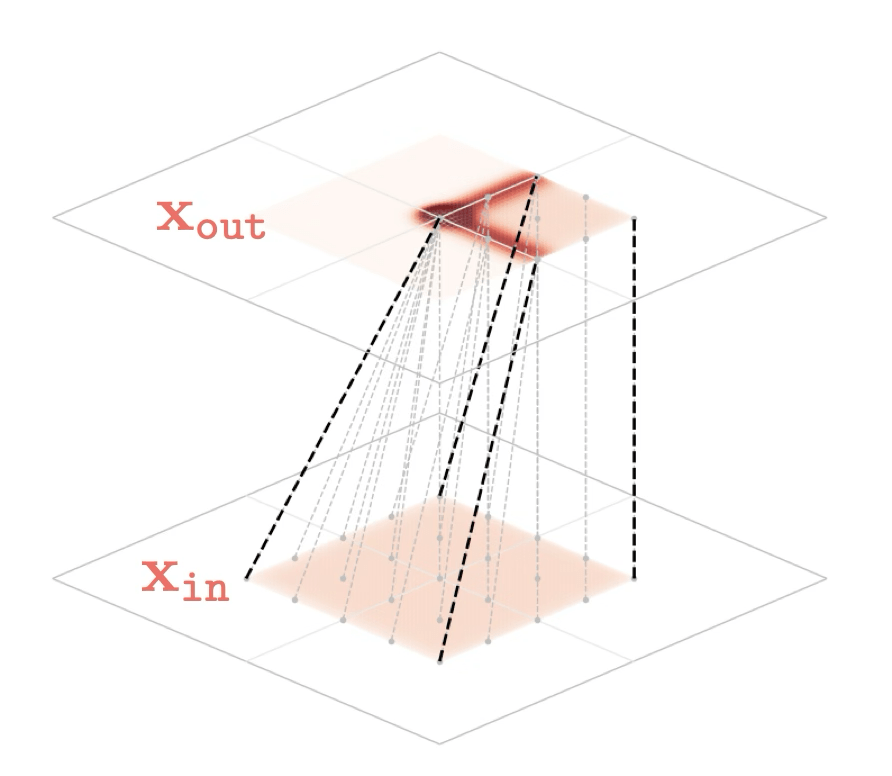
mapping 2D


Training data
x
z_1
a_1
z_2
g
{z}_1=\text { linear }(x)
{a}_1=\text { ReLU}(z_1)
g=\text {softmax}(z_2)
{z}_2=\text { linear }(a_1)
x\in \mathbb{R^2}
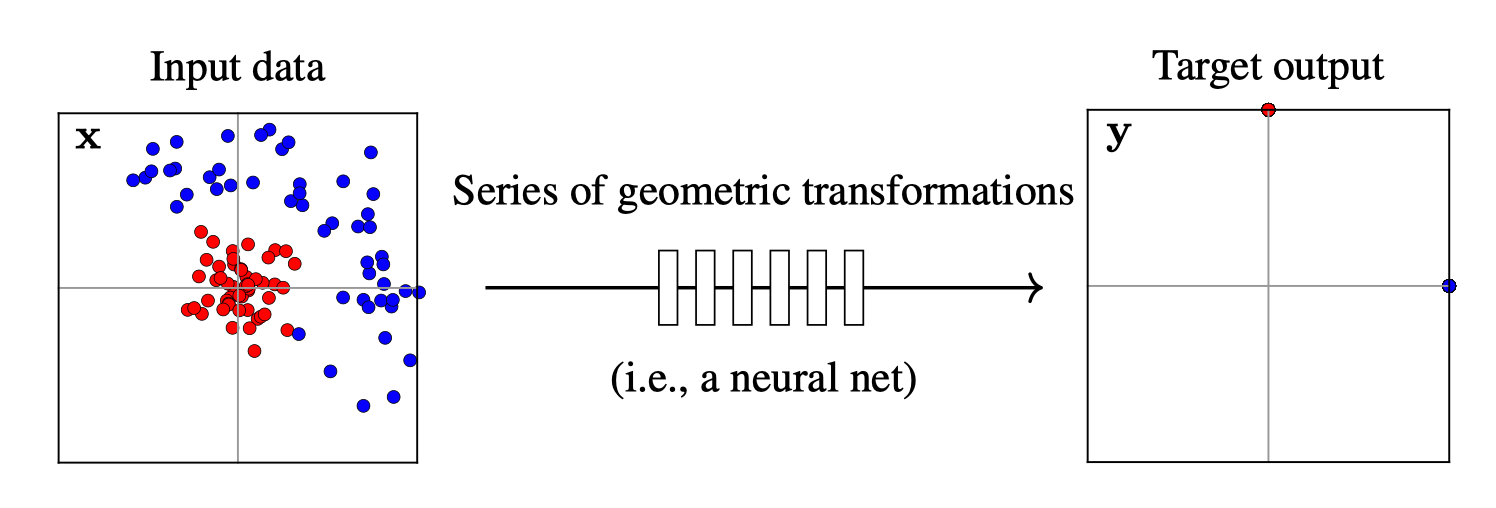
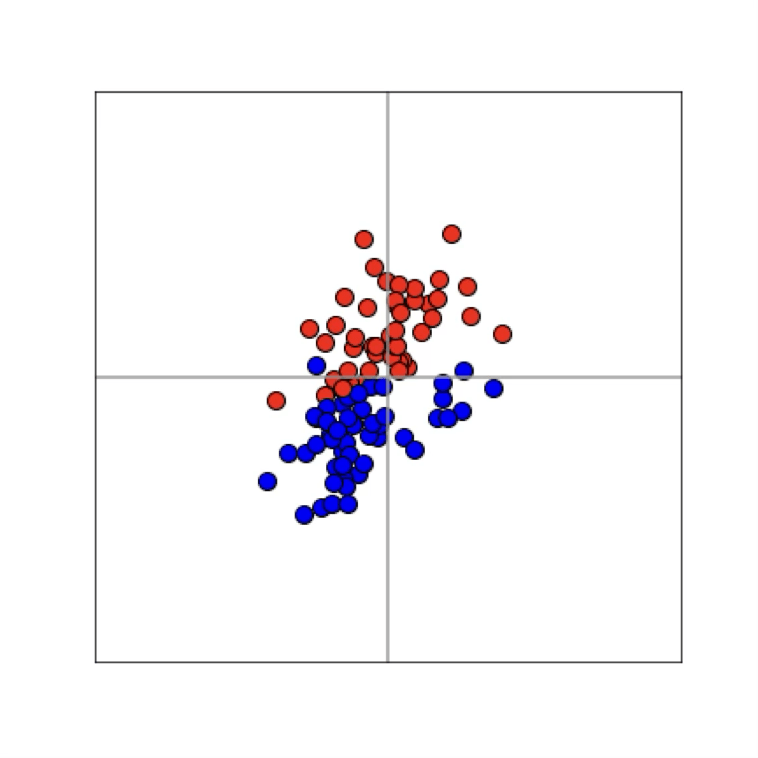
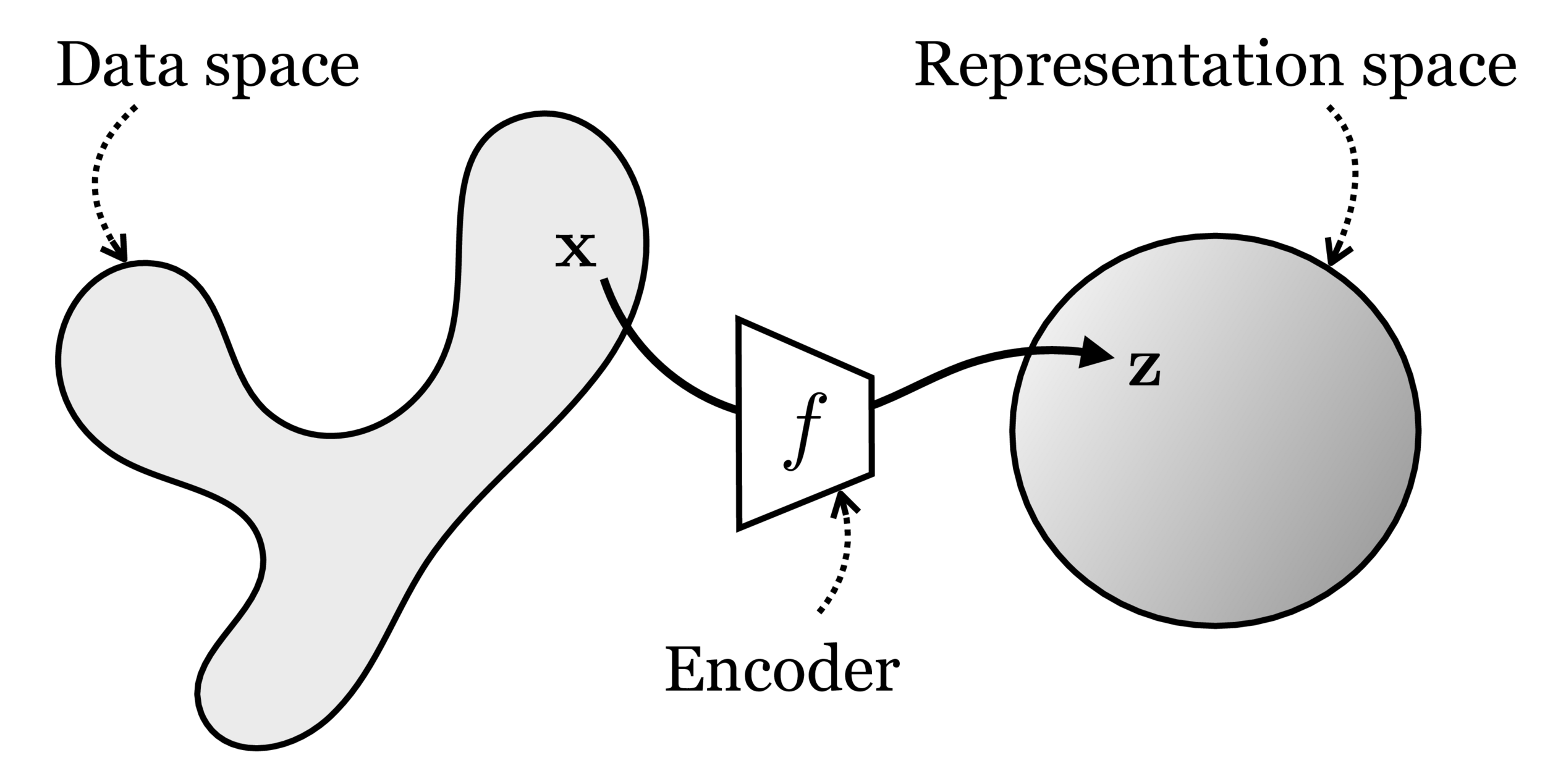
maps from complex data space to simple embedding space

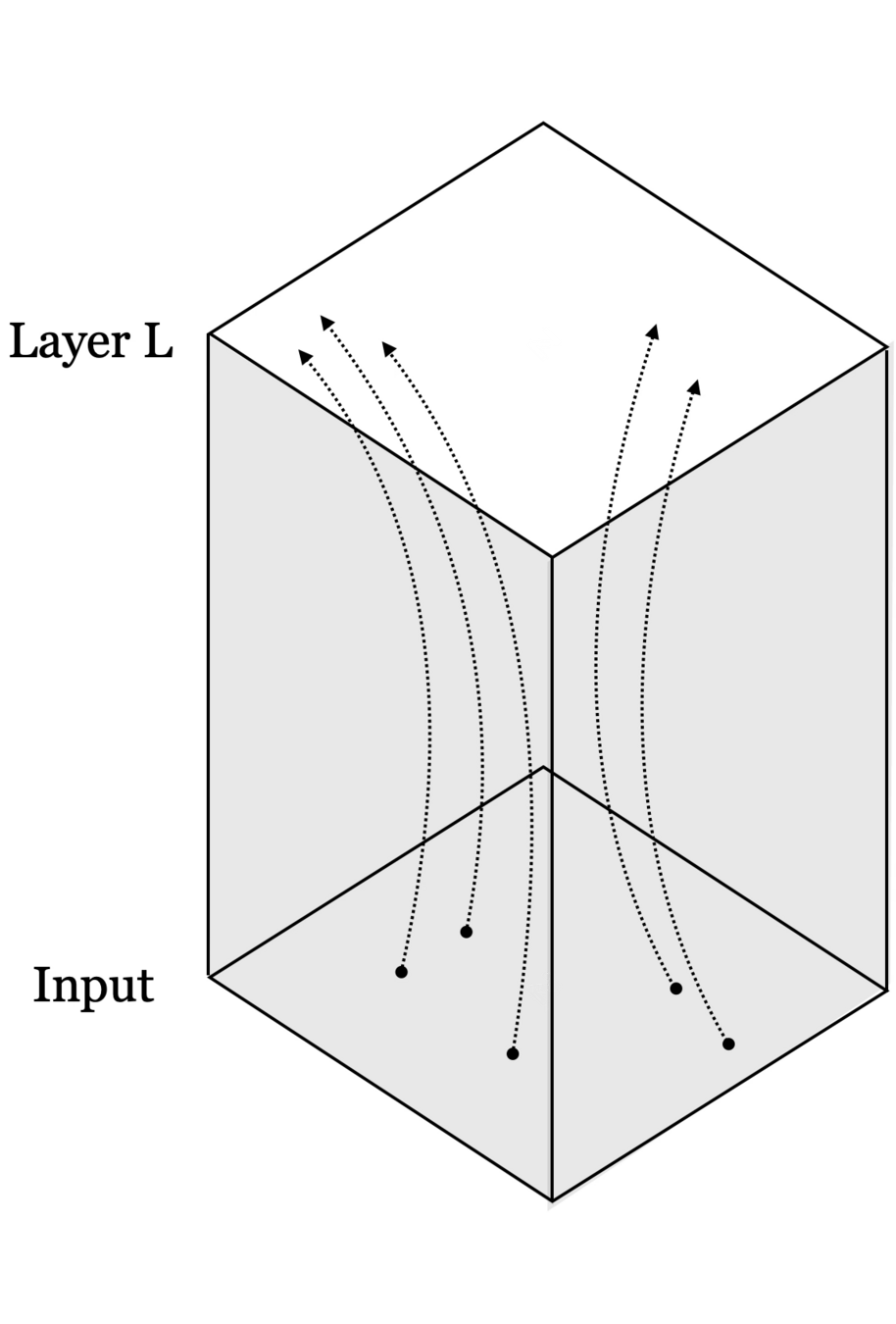
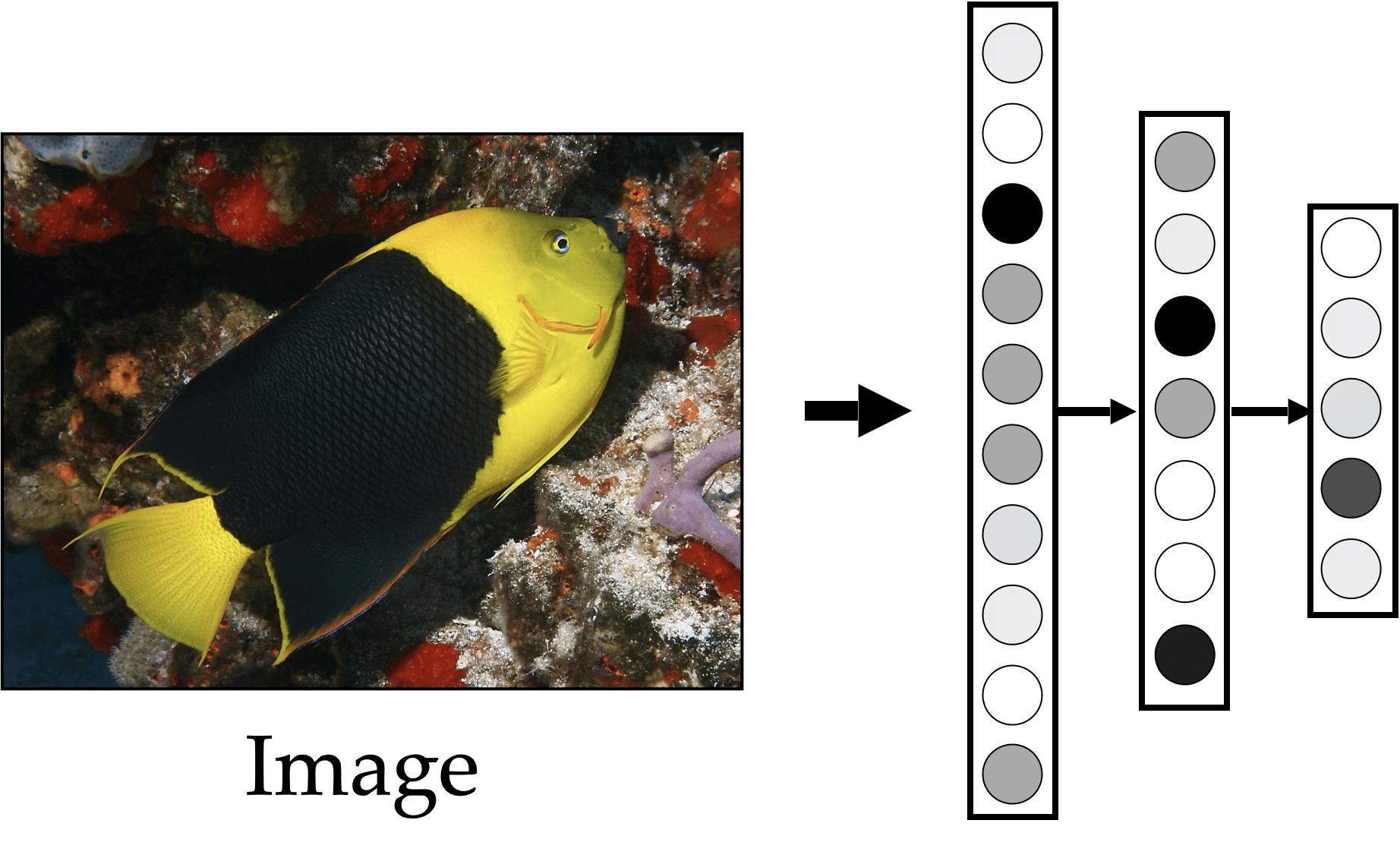
Neural networks are representation learners
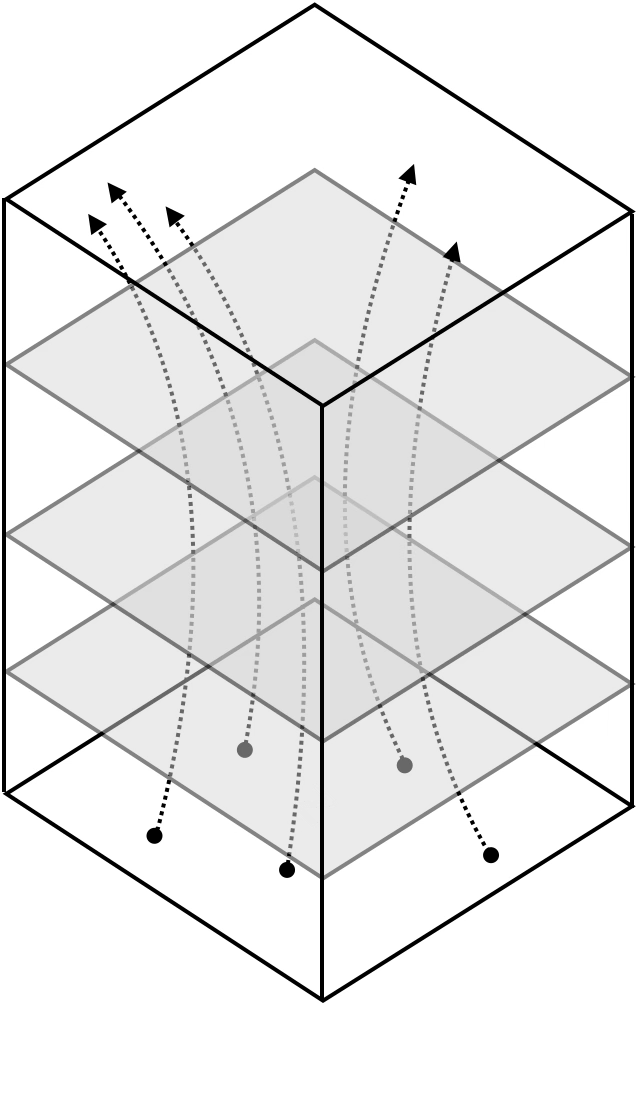
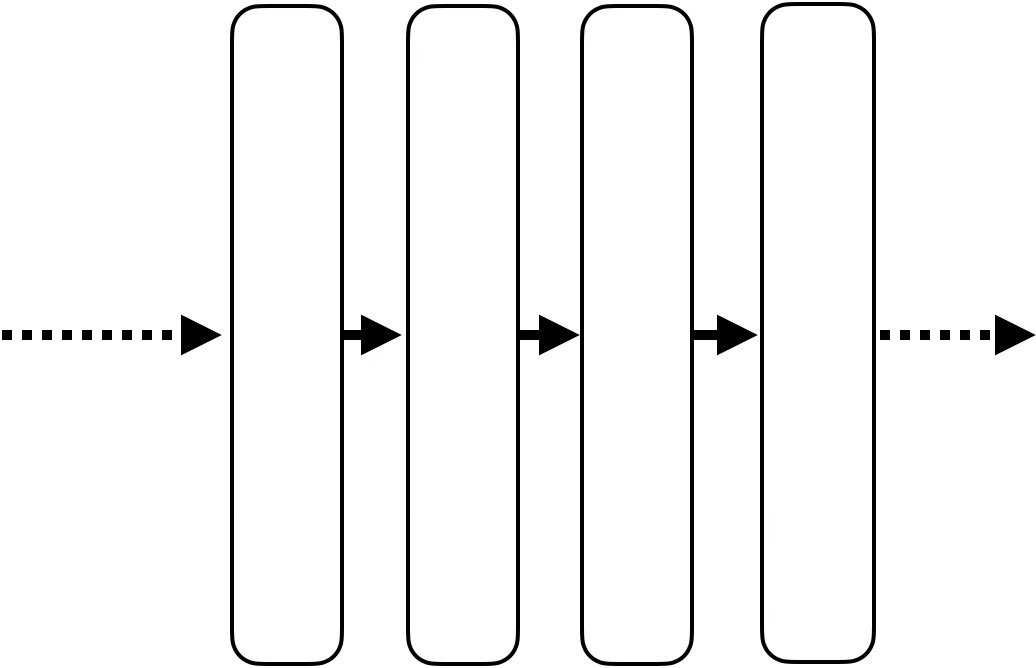
Deep nets transform datapoints, layer by layer
Each layer gives a different representation (aka embedding) of the data
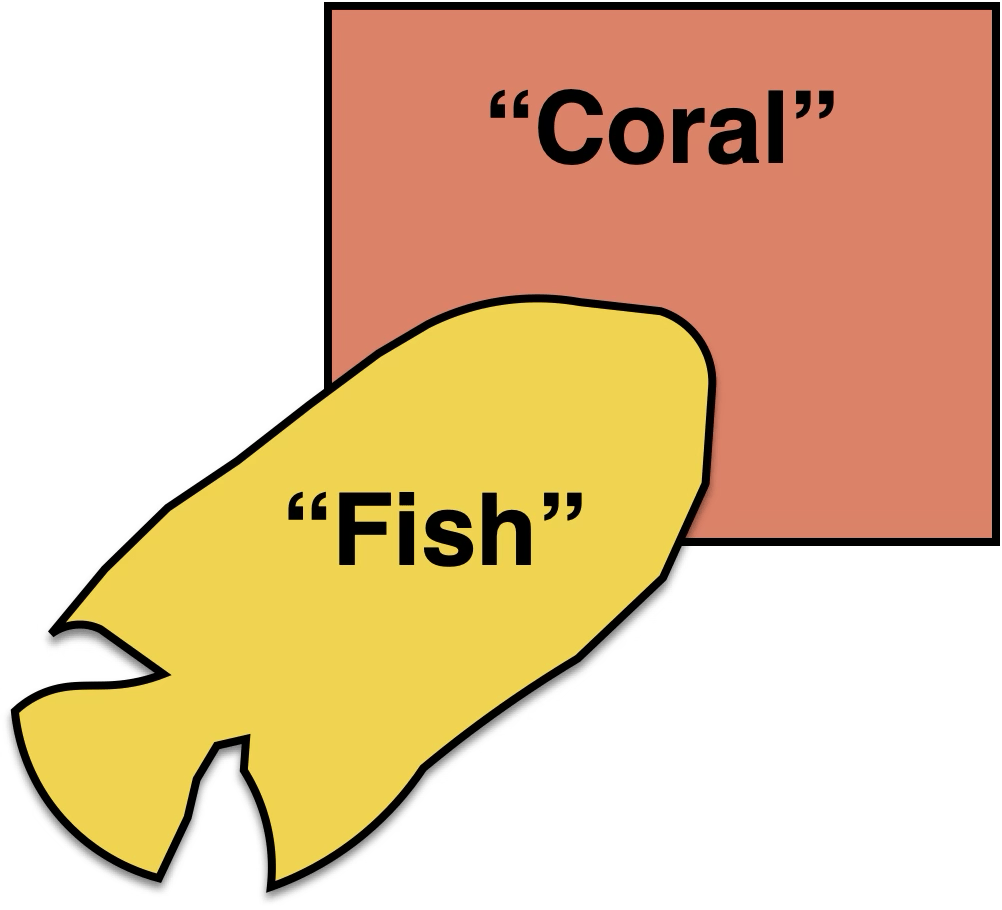
🧠
humans also learn representations
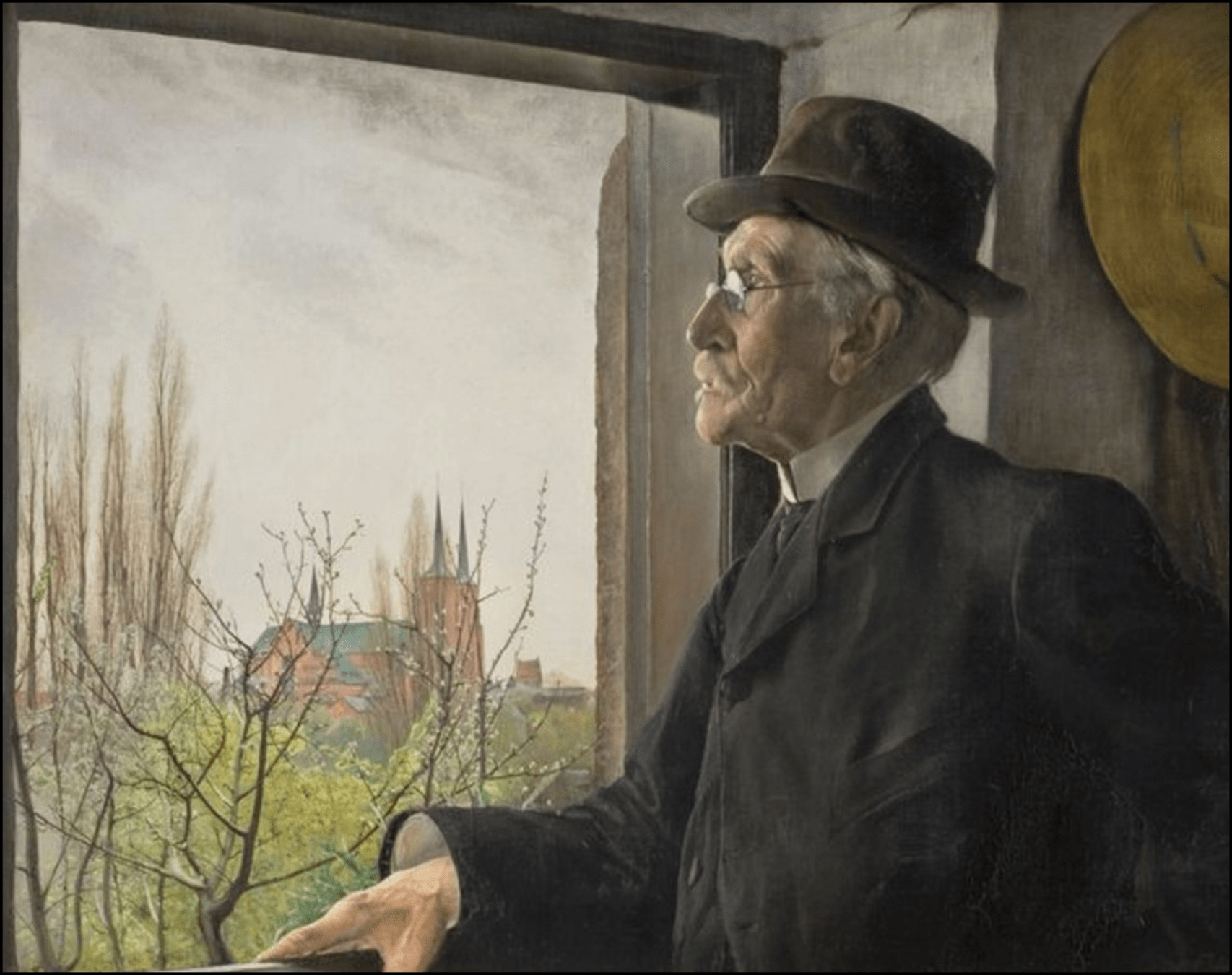
"I stand at the window and see a house, trees, sky. Theoretically I might say there were 327 brightnesses and nuances of colour. Do I have "327"? No. I have sky, house, and trees.”
— Max Wertheimer, 1923
Good representations are:
- Compact (minimal)
- Explanatory (roughly sufficient)
[See “Representation Learning”, Bengio 2013, for more commentary]
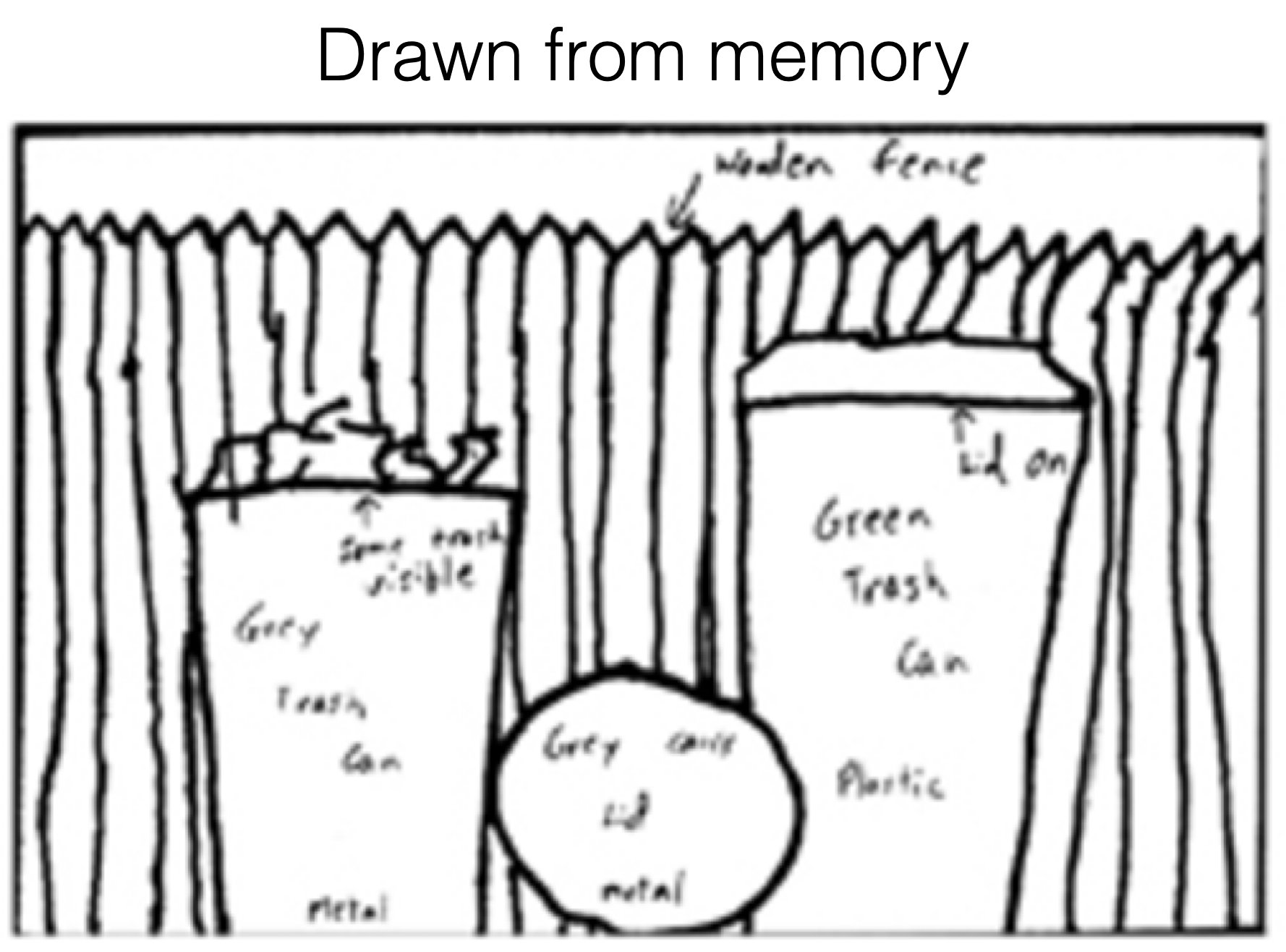

[Bartlett, 1932]
[Intraub & Richardson, 1989]
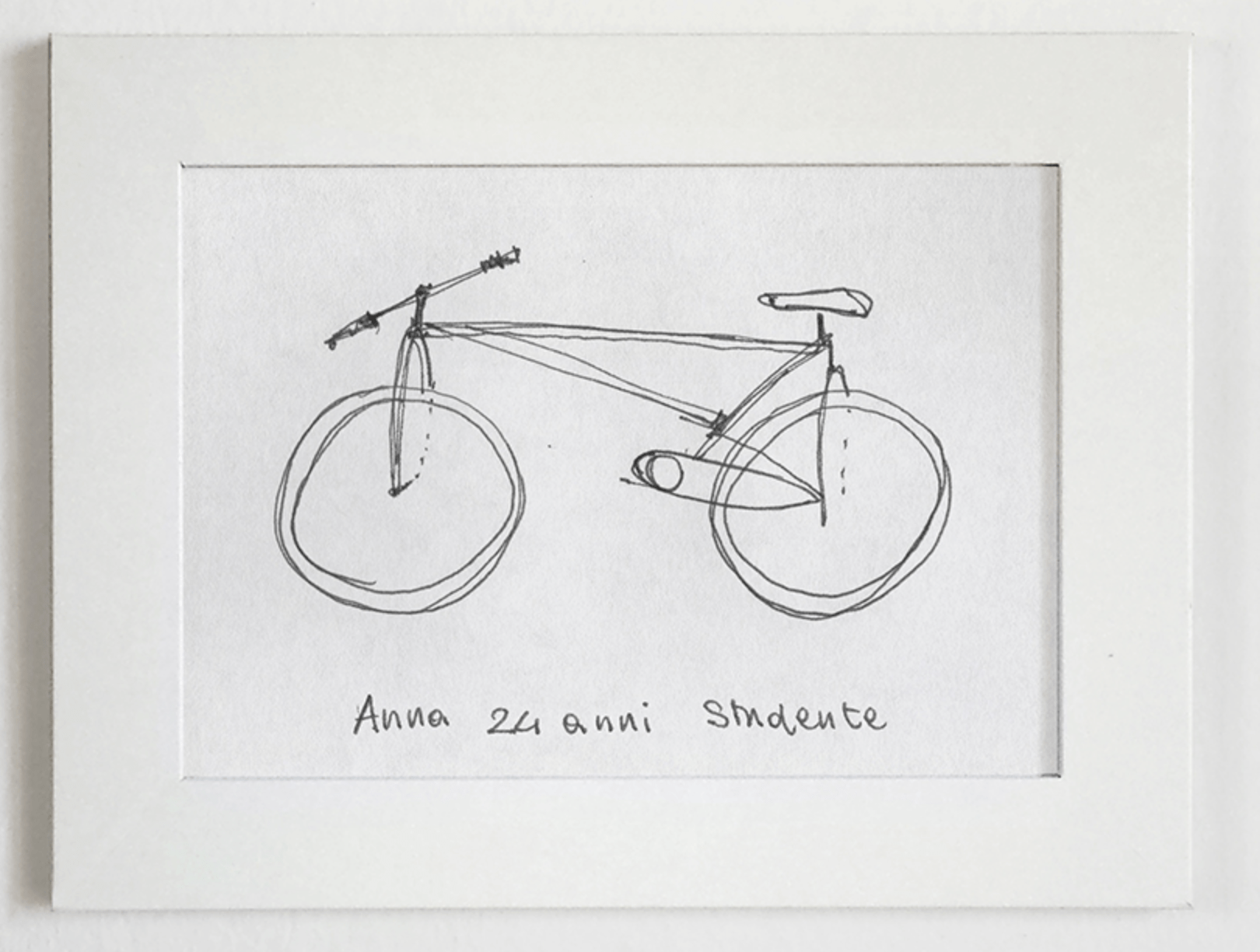
[https://www.behance.net/gallery/35437979/Velocipedia]


Outline
- Recap, neural networks mechanism
- Neural networks are representation learners
-
Auto-encoder:
- Bottleneck
- Reconstruction
- Unsupervised learning
- (Some recent representation learning ideas)
- Compact (minimal)
- Explanatory (roughly sufficient)
- Disentangled (independent factors)
- Interpretable
- Make subsequent problem solving easy
[See “Representation Learning”, Bengio 2013, for more commentary]
Auto-encoders try to achieve these
\left\{
\begin{array}{l}
\\
\\
\end{array}
\right.
\left\{
\begin{array}{l}
\\
\\
\\
\end{array}
\right.
these may just emerge as well
Good representations are:
compact representation/embedding
Auto-encoder
Auto-encoder
"What I cannot create, I do not understand." Feynman
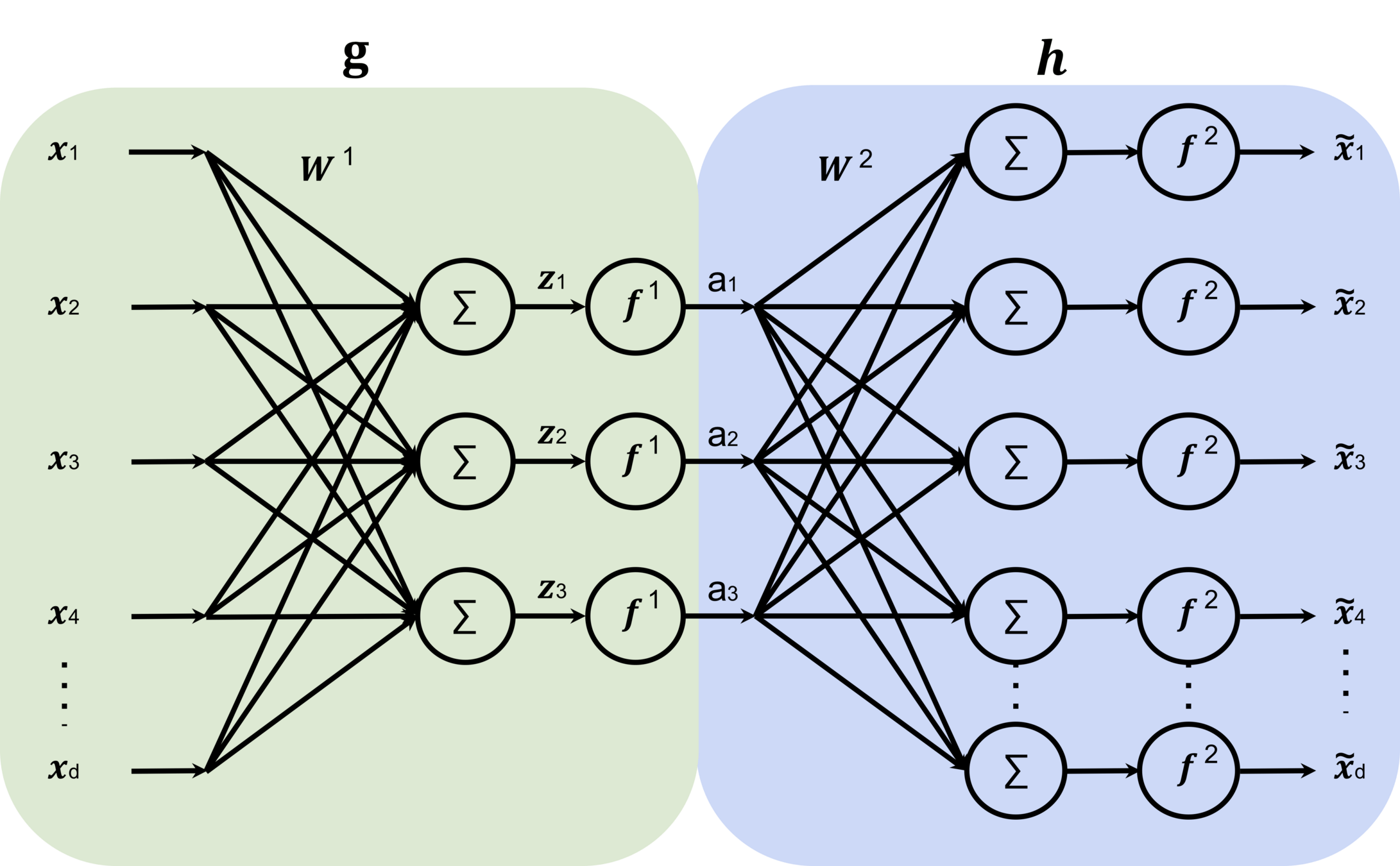
Auto-encoder
\underbrace{\hspace{1cm}}
\underbrace{\hspace{1cm}}
encoder
decoder
bottleneck
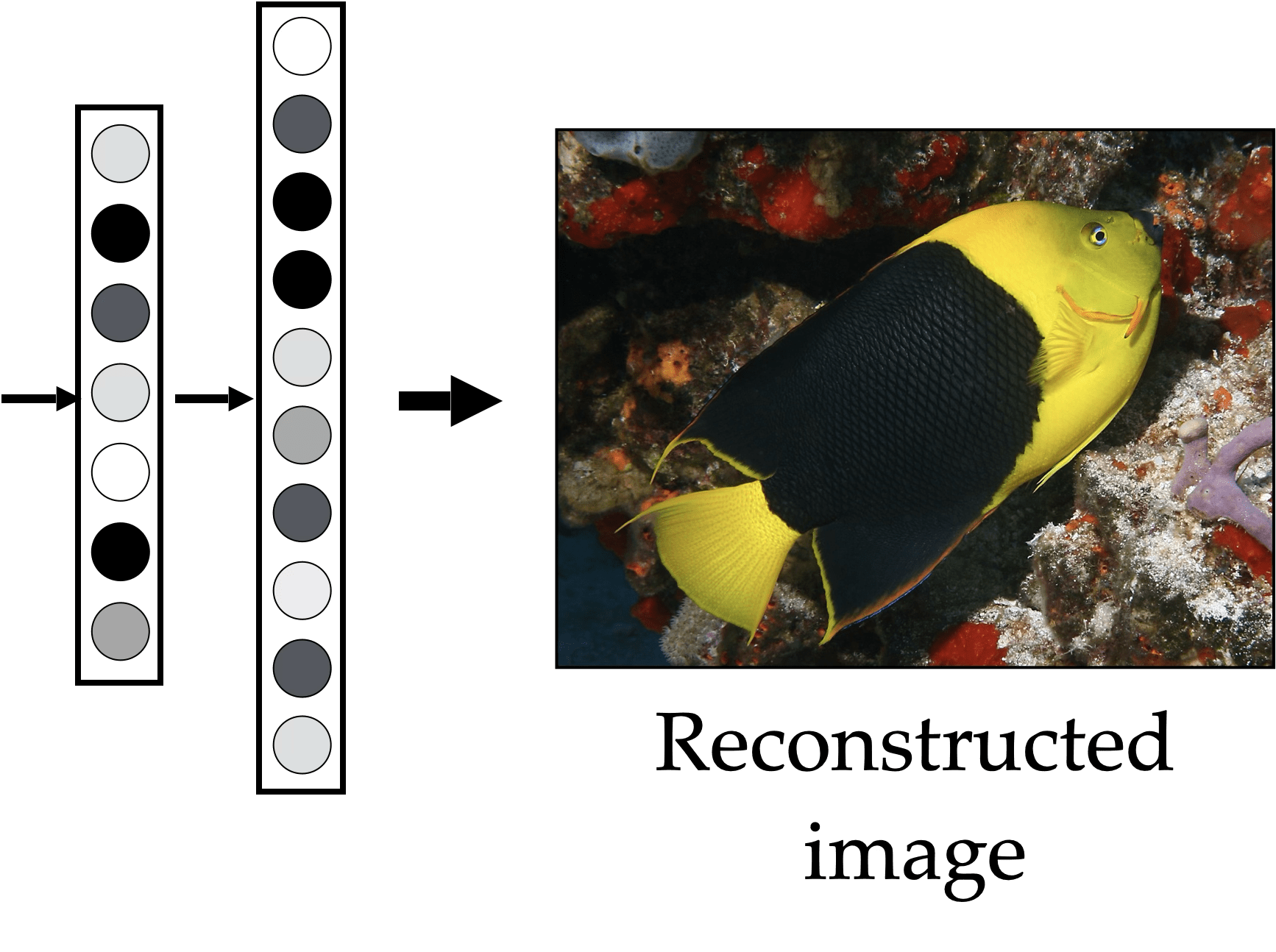
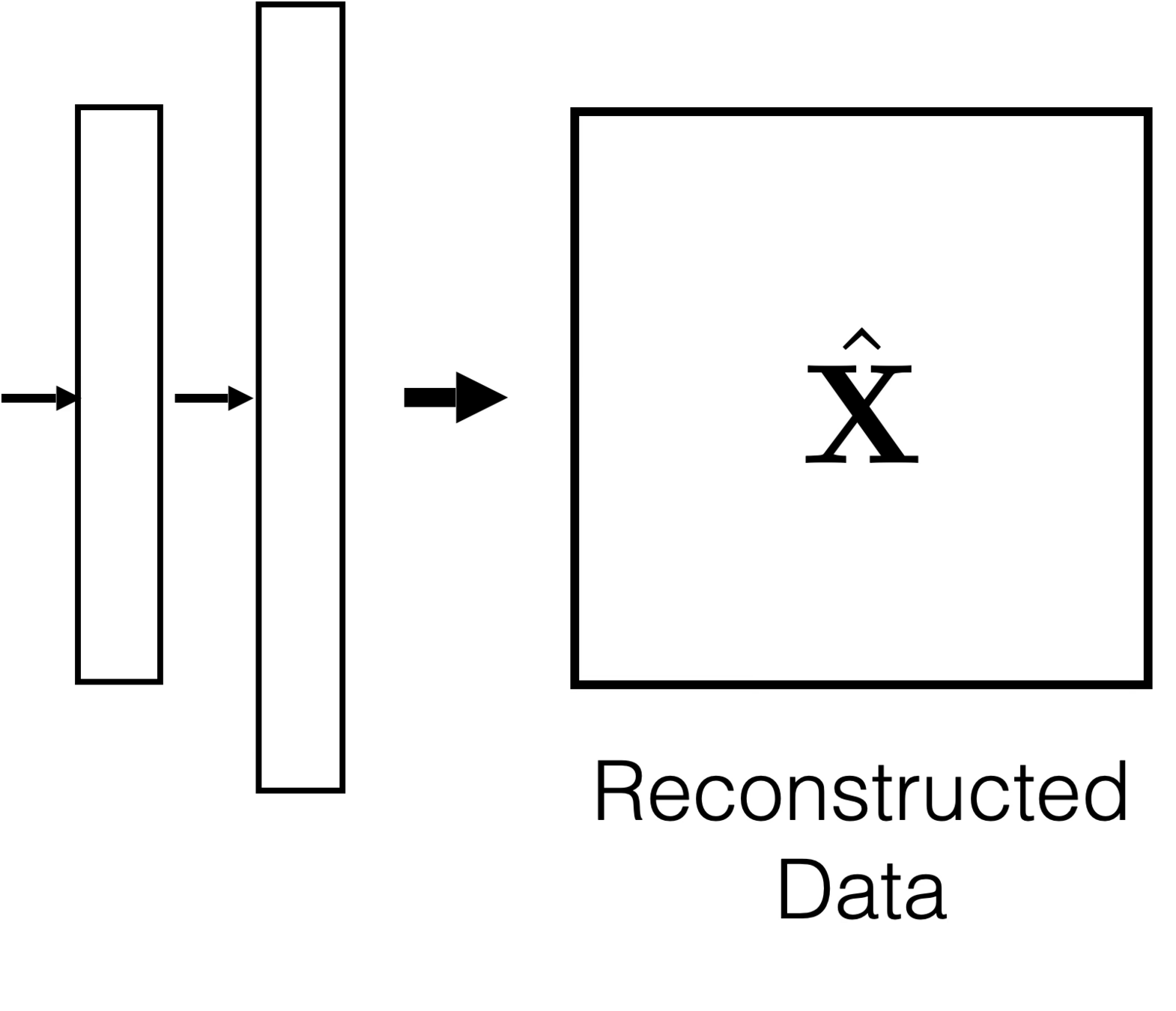
Auto-encoder
x
\tilde{x}=\text{NN}(x;W)
\min_{W} ||x - \tilde{x}||^2
input \(x \in \mathbb{R^d}\)
output \(\tilde{x} \in \mathbb{R^d}\)
\dots
bottleneck
typically, has lower dimension than \(d\)
Auto-encoder
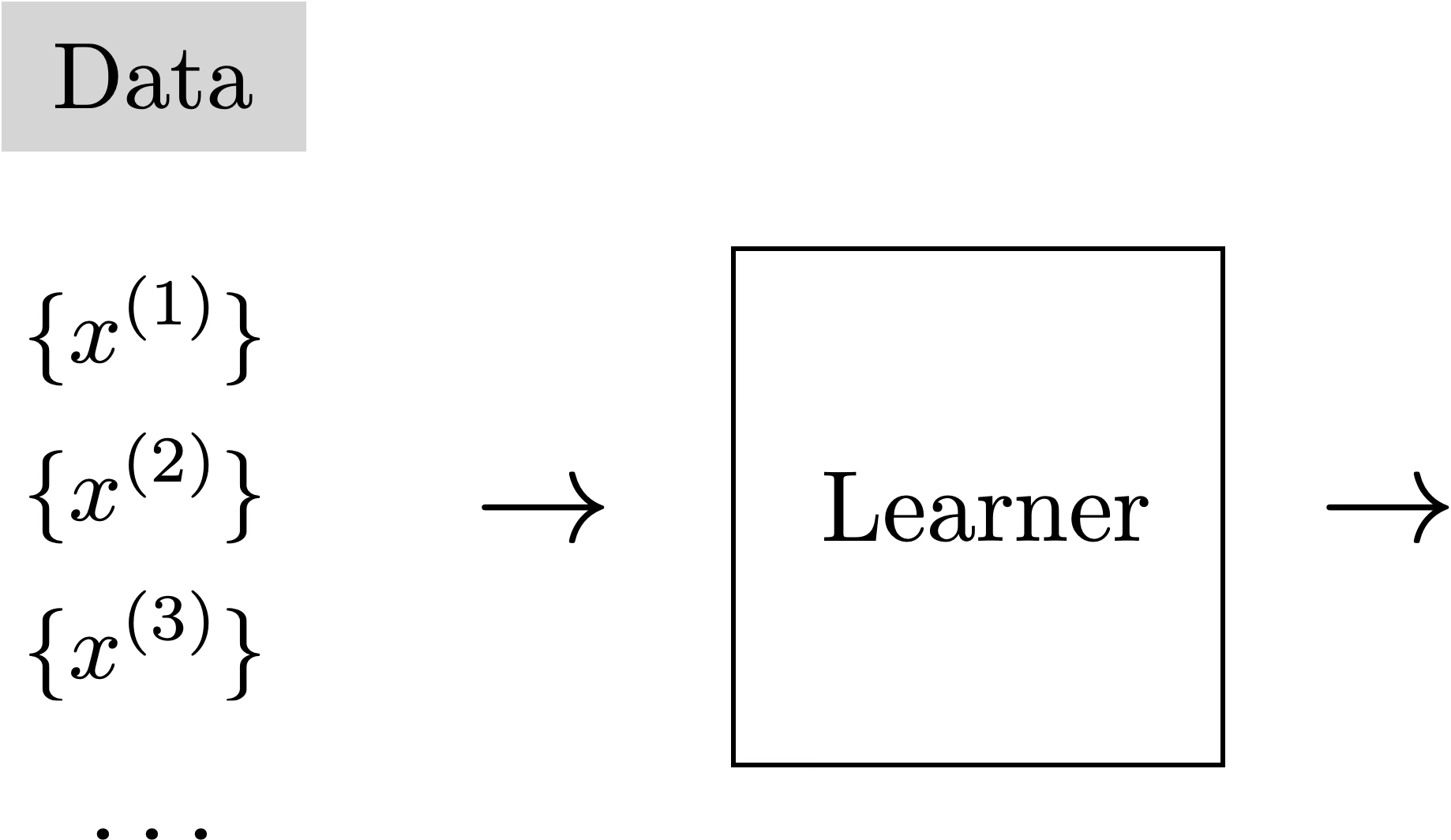
Training Data
\left\{{x}^{(i)}\right\}_{i=1}^n
loss/objective
\mathcal{L}(F(\mathbf{x}), \mathbf{x})=\|F(\mathbf{x})-\mathbf{x}\|^2
hypothesis class
A model
\(f\)
F=g \circ h: \mathbb{R}^d \rightarrow \mathbb{R}^m \rightarrow \mathbb{R}^d
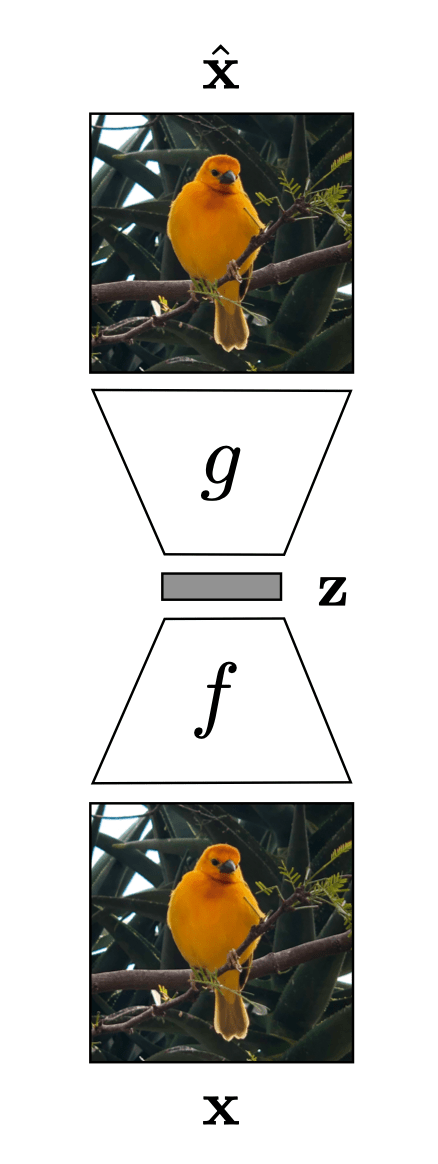
h
g
\(m<d\)
\(f: X \rightarrow Y\)
Supervised Learning
"Good"
Representation
Unsupervised Learning
Training Data
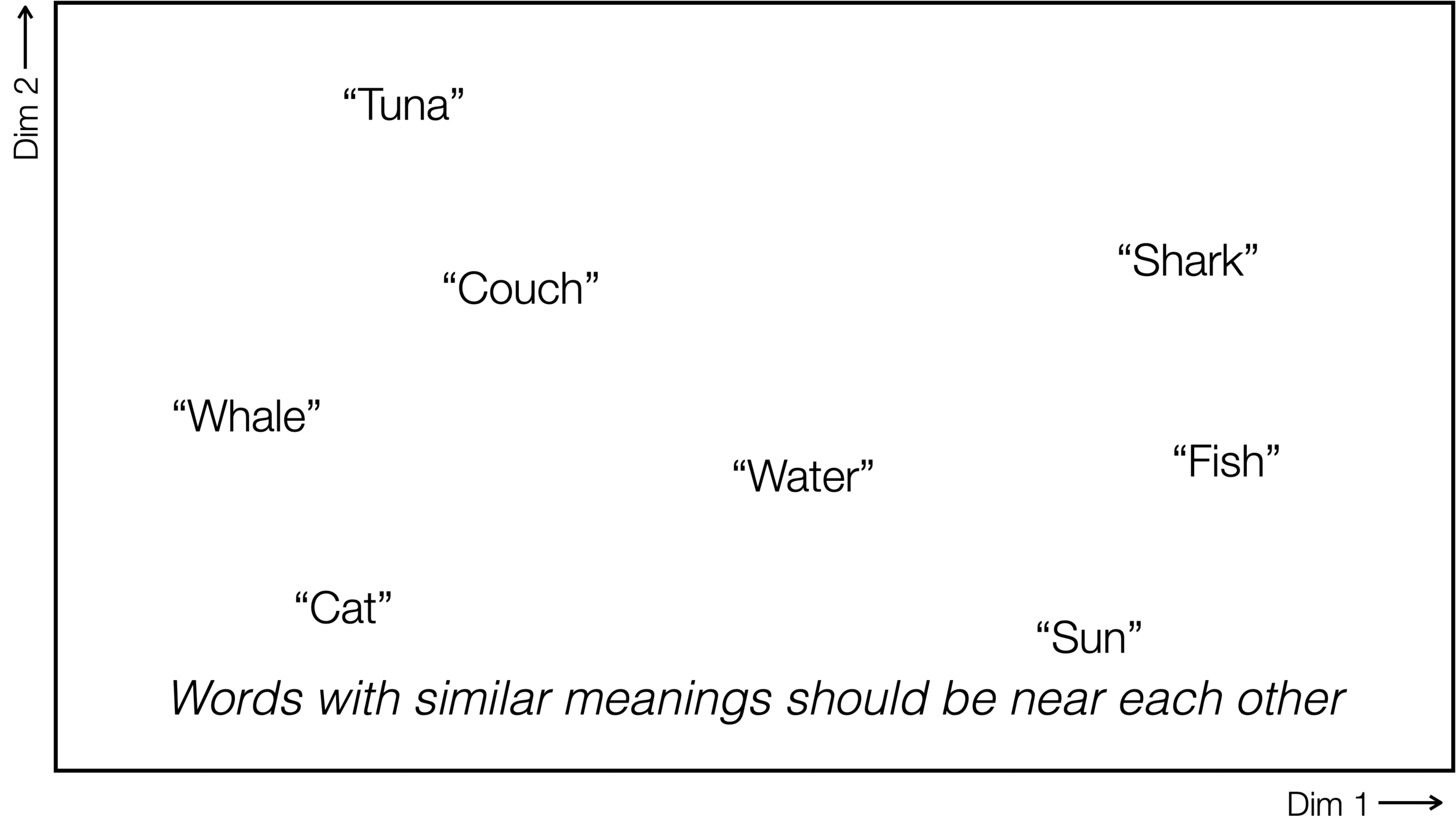
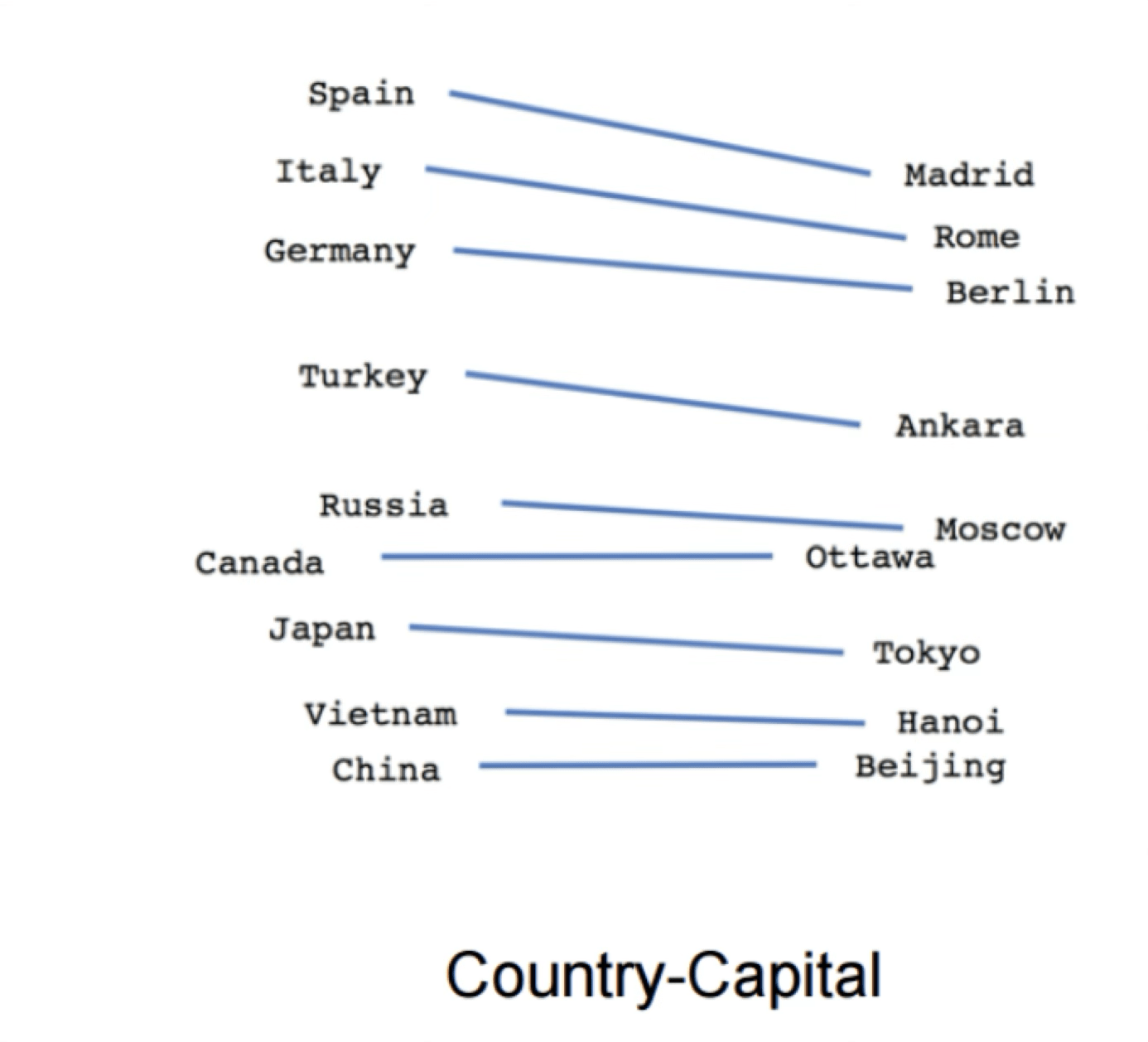
Word2Vec
https://www.tensorflow.org/text/tutorials/word2vec
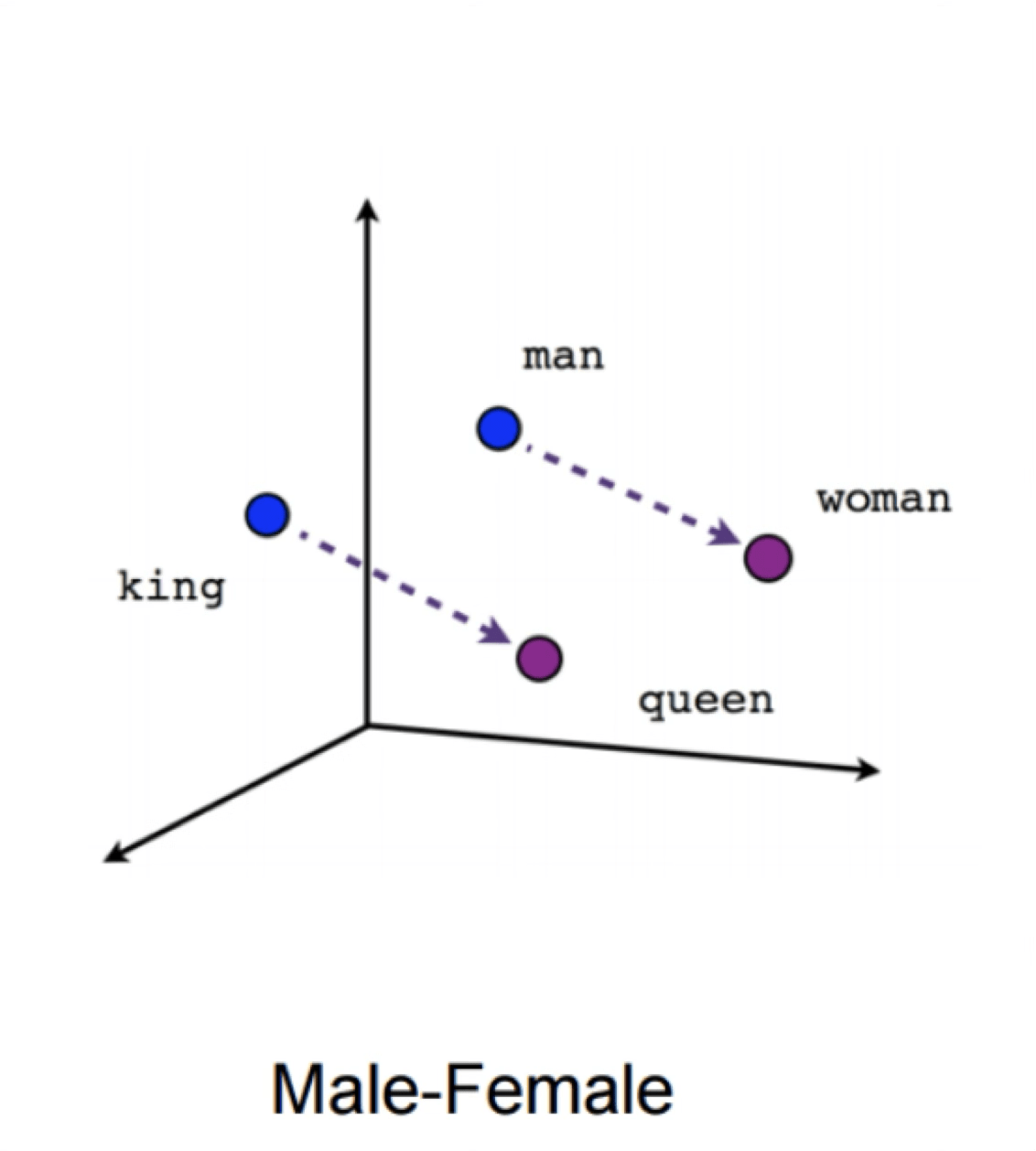
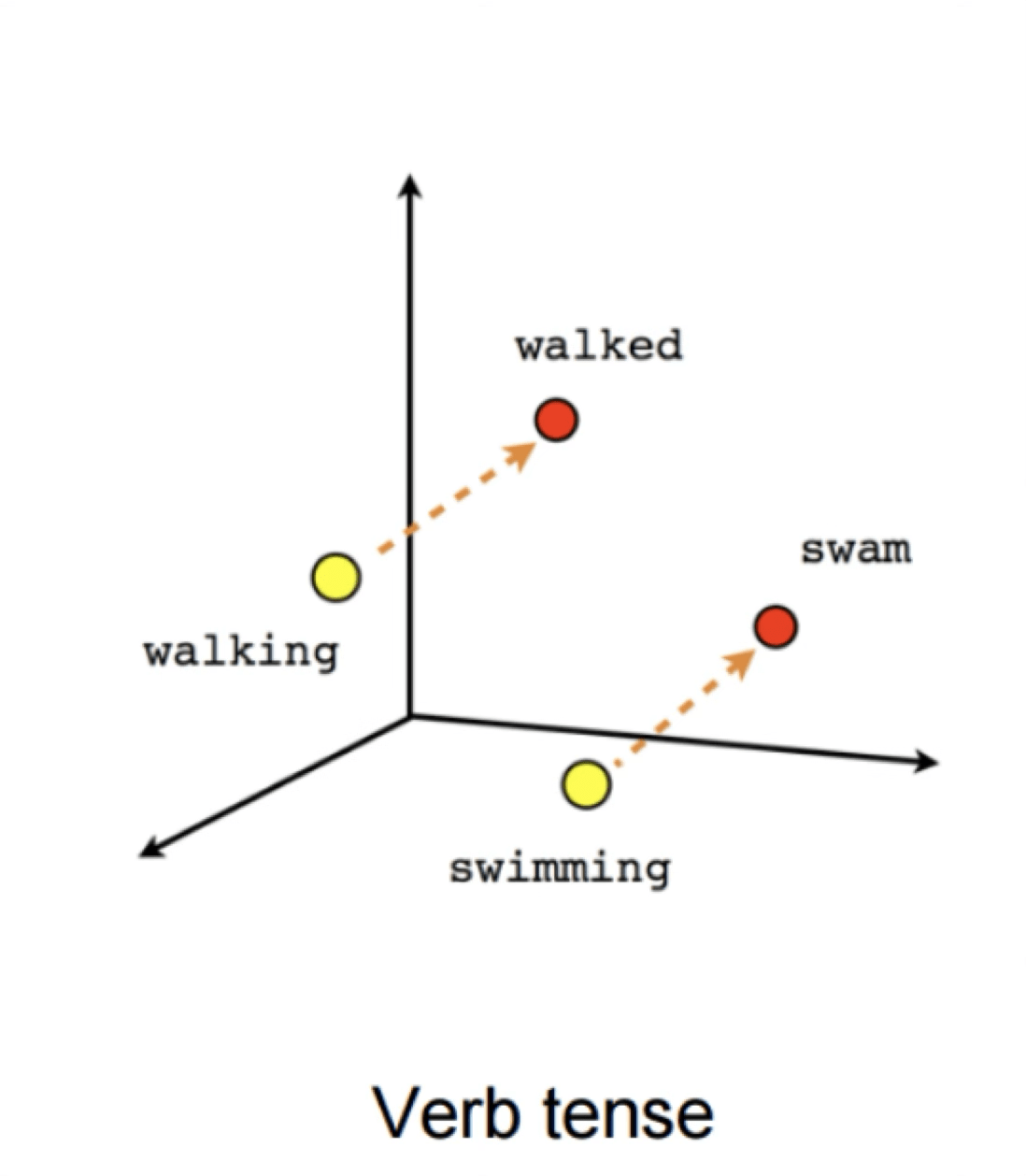
Word2Vec
verb tense
gender
X = Vector(“Paris”) – vector(“France”) + vector(“Italy”) \(\approx\) vector("Rome")
“Meaning is use” — Wittgenstein
Can help downstream tasks:
- sentiment analysis
- machine translation
- info retrieval
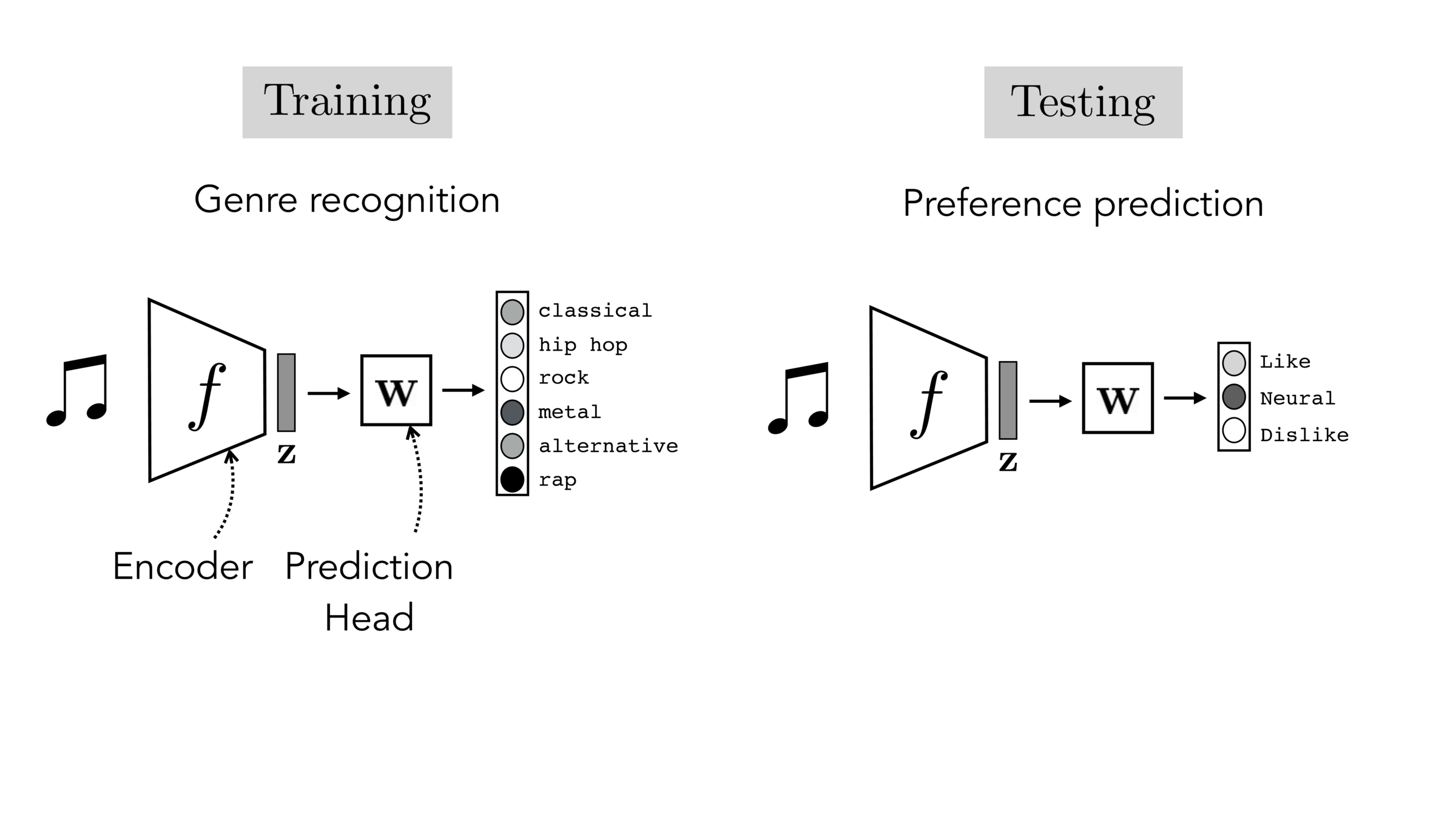
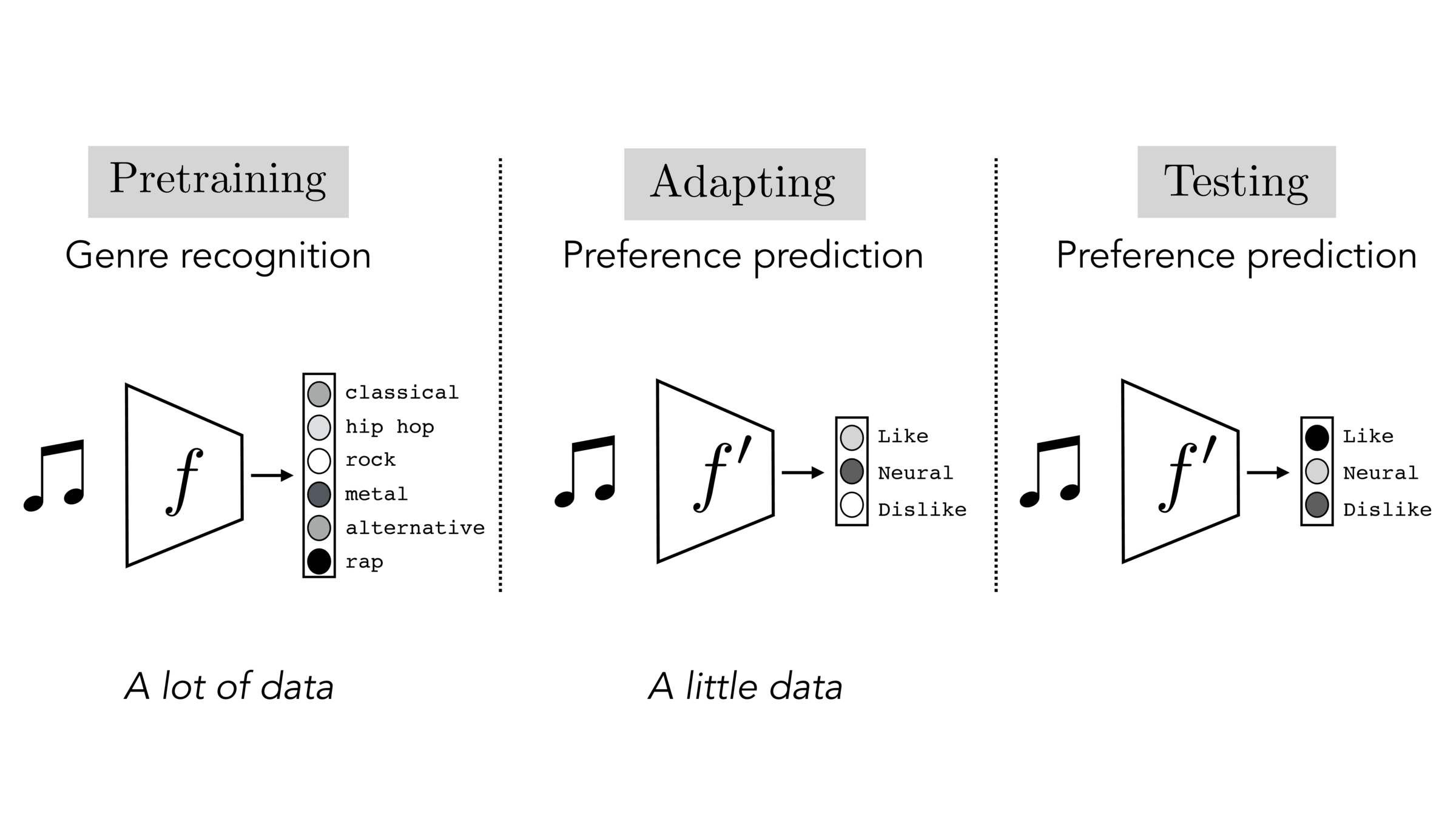
Often, what we will be “tested” on is not what we were trained on.
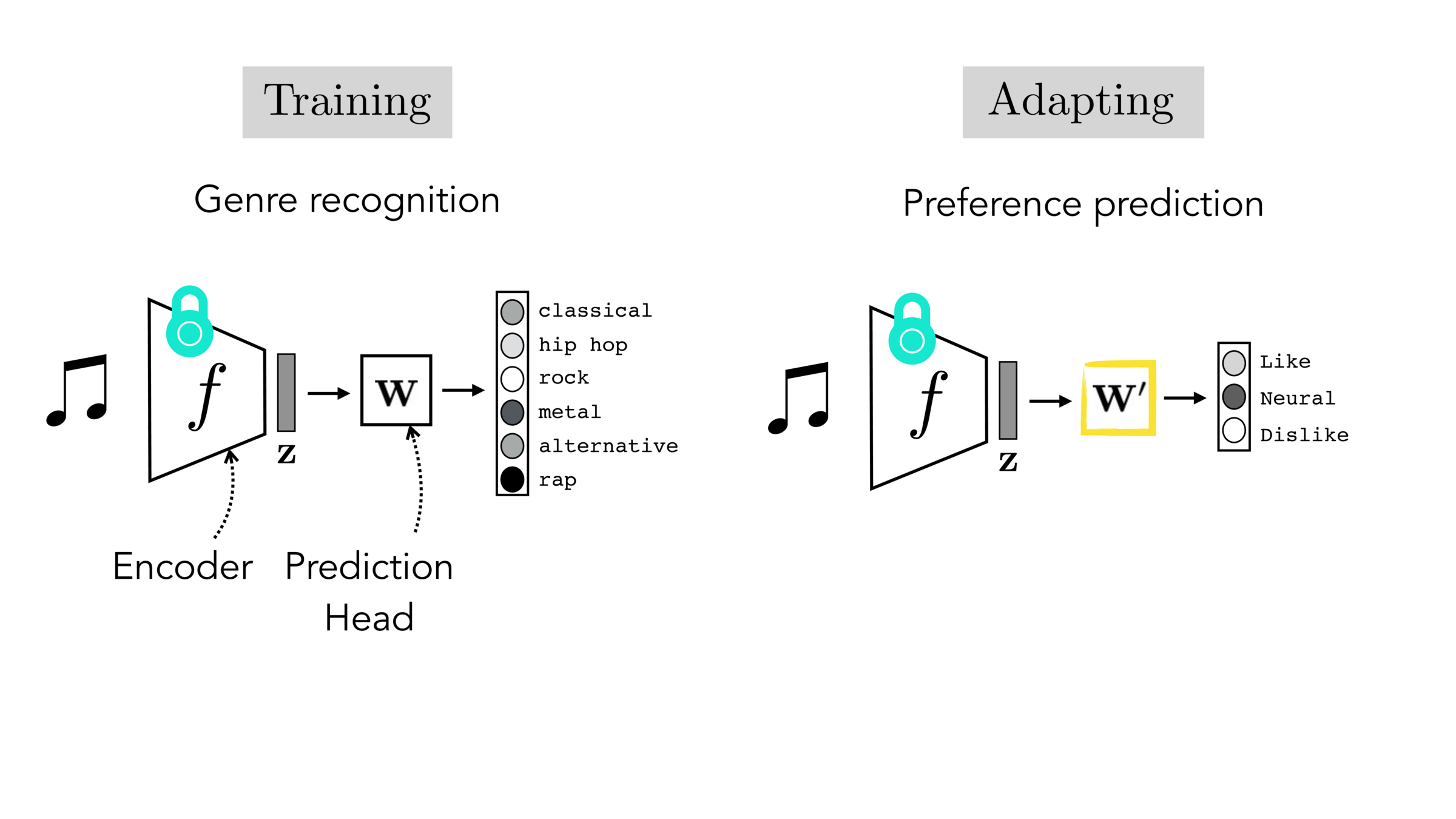
Final-layer adaptation: freeze \(f\), train a new final layer to new target data
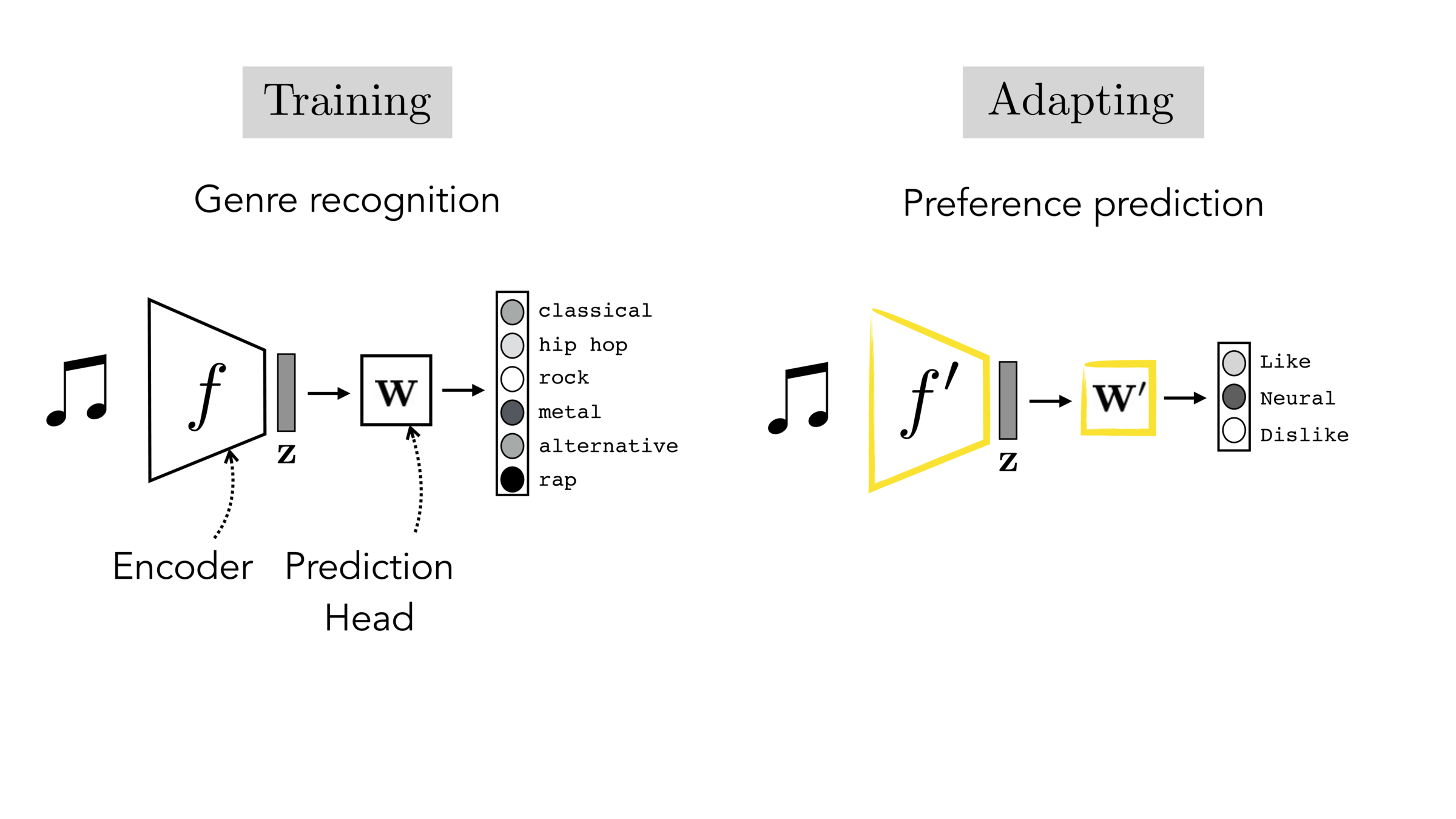
Finetuning: initialize \(f’\) as \(f\), then continue training for \(f'\) as well, on new target data
Outline
- Recap, neural networks mechanism
- Neural networks are representation learners
- Auto-encoder:
- Bottleneck
- Reconstruction
- Unsupervised learning
- (Some recent representation learning ideas)
\left(
\begin{array}{l}
\\
\\
\\
\\
\\
\\
\end{array}
\right.
Feature reconstruction (unsupervised learning)
Features
Reconstructed Features
Label prediction (supervised learning)
Features
Label
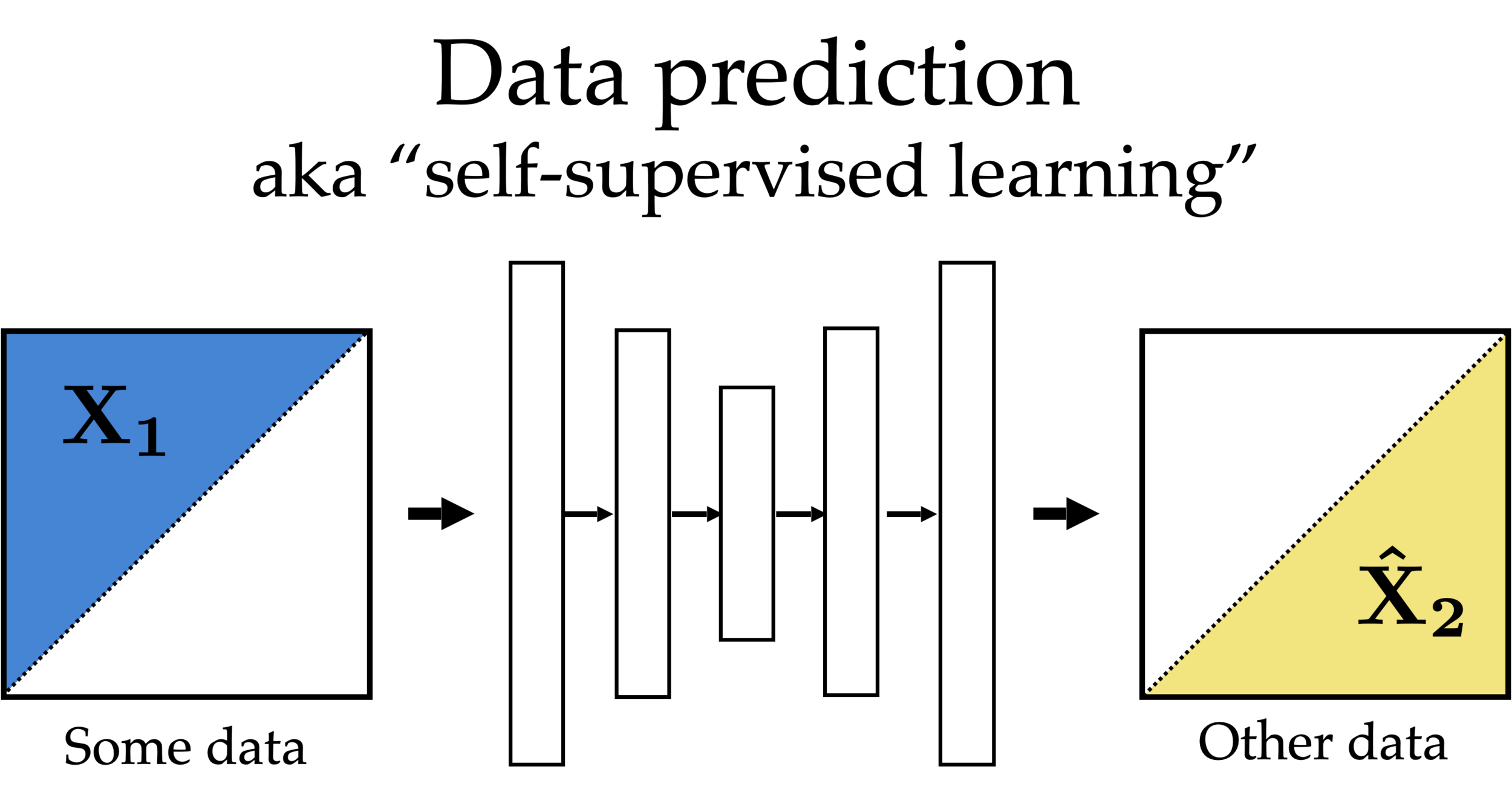
Partial
features
Other partial
features
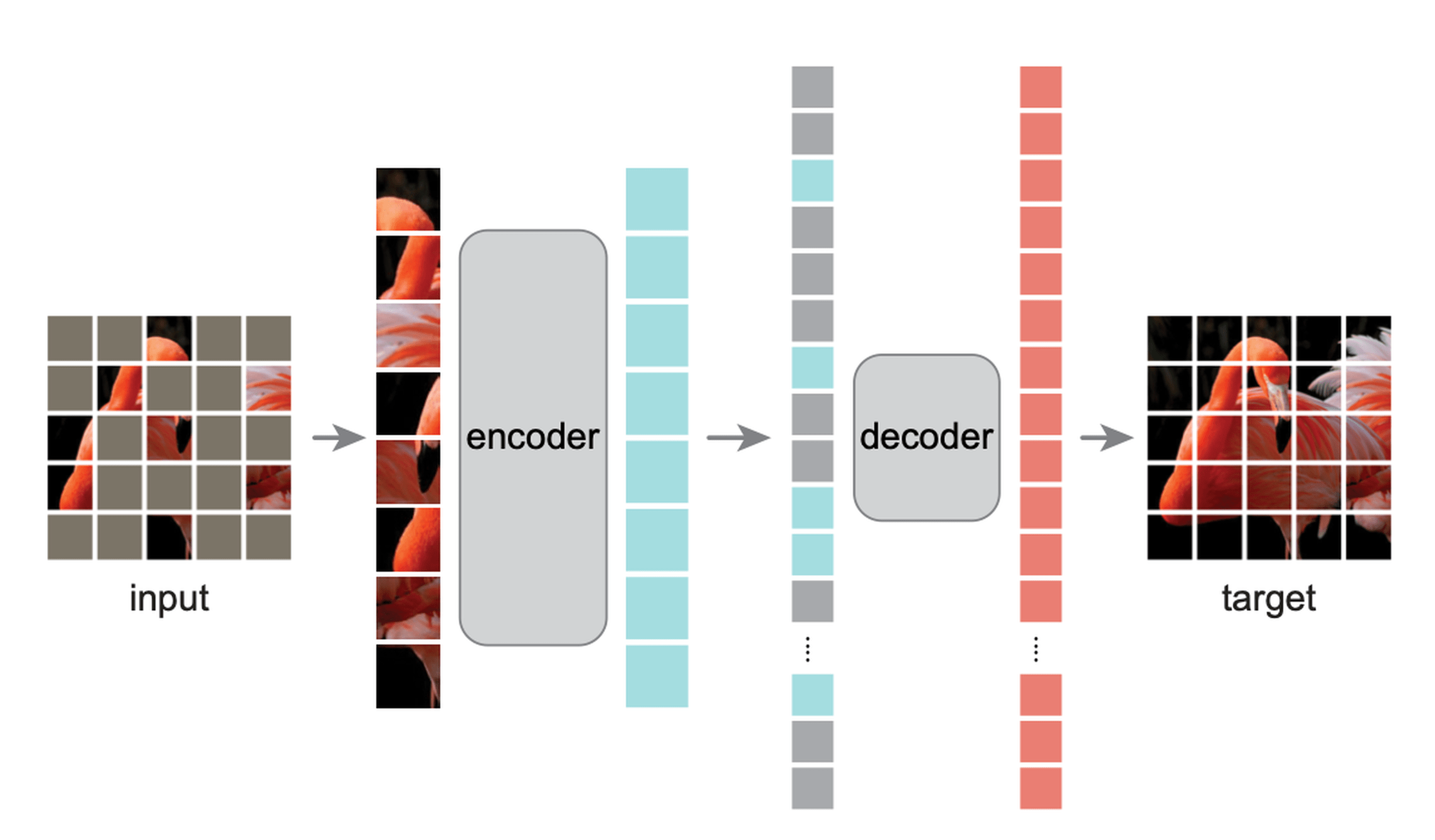
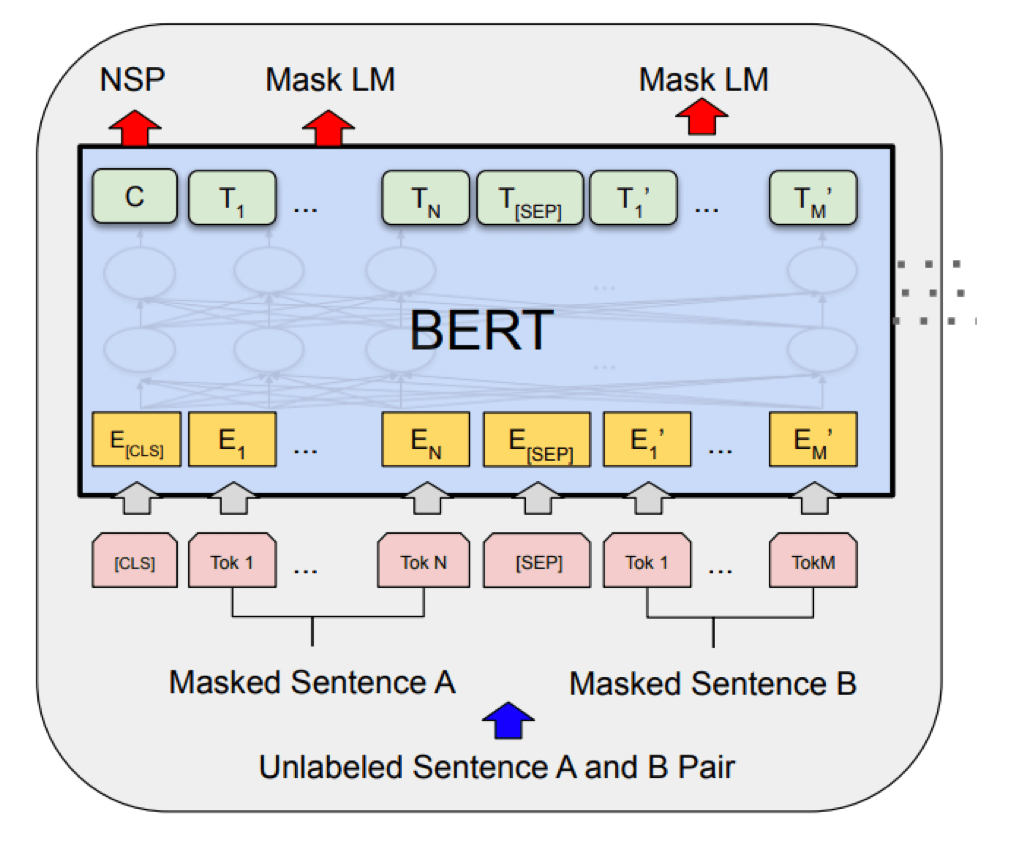
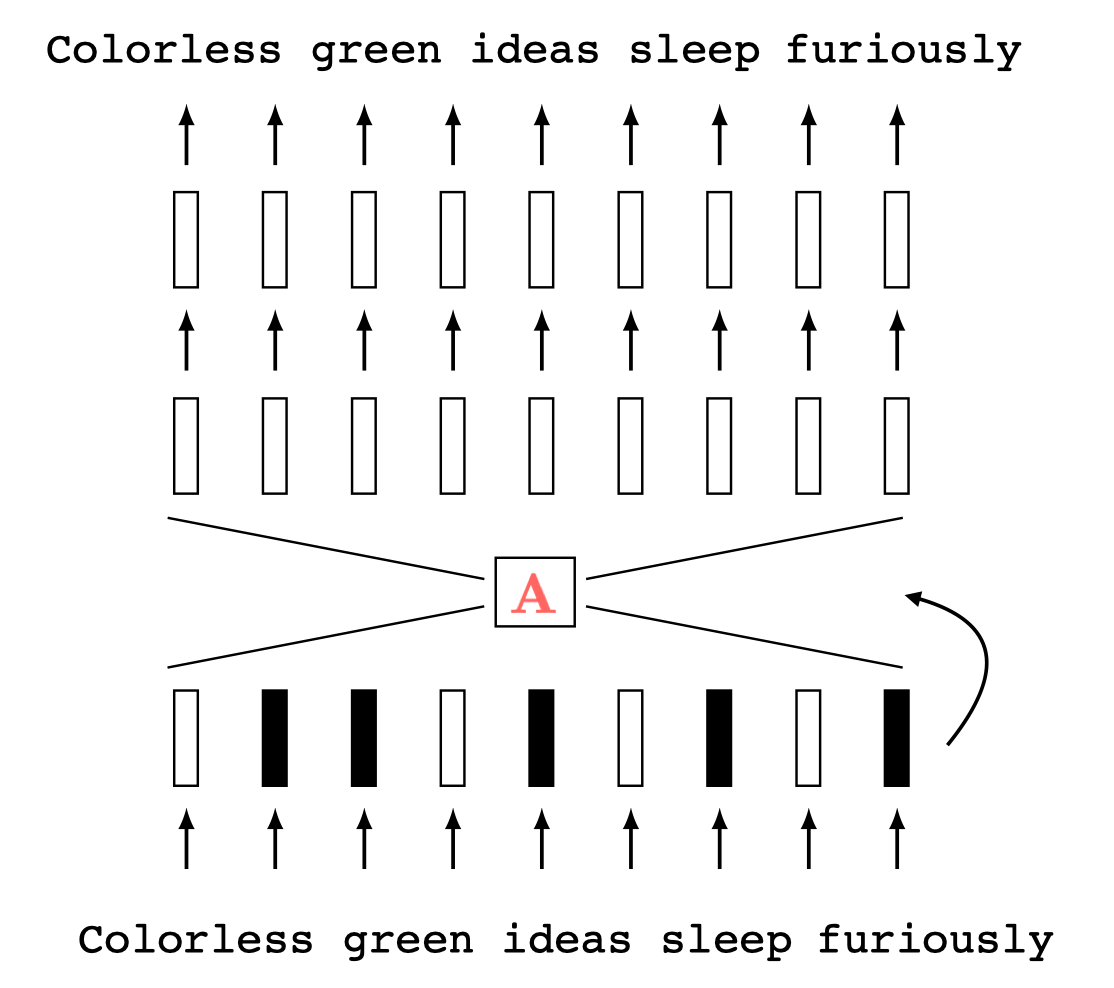
Masked Auto-encoder
[He, Chen, Xie, et al. 2021]
Masked Auto-encoder
[Devlin, Chang, Lee, et al. 2019]

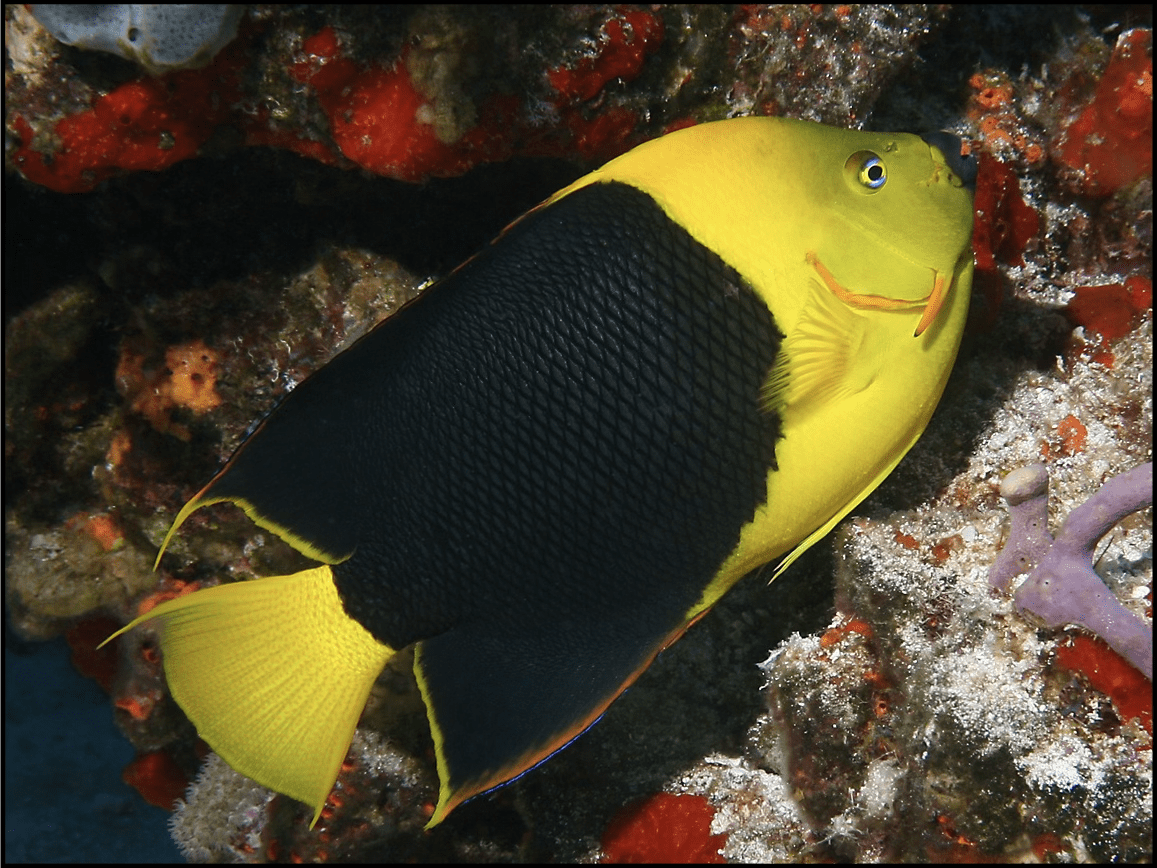
[Zhang, Isola, Efros, ECCV 2016]
predict color from gray-scale
[Zhang, Isola, Efros, ECCV 2016]
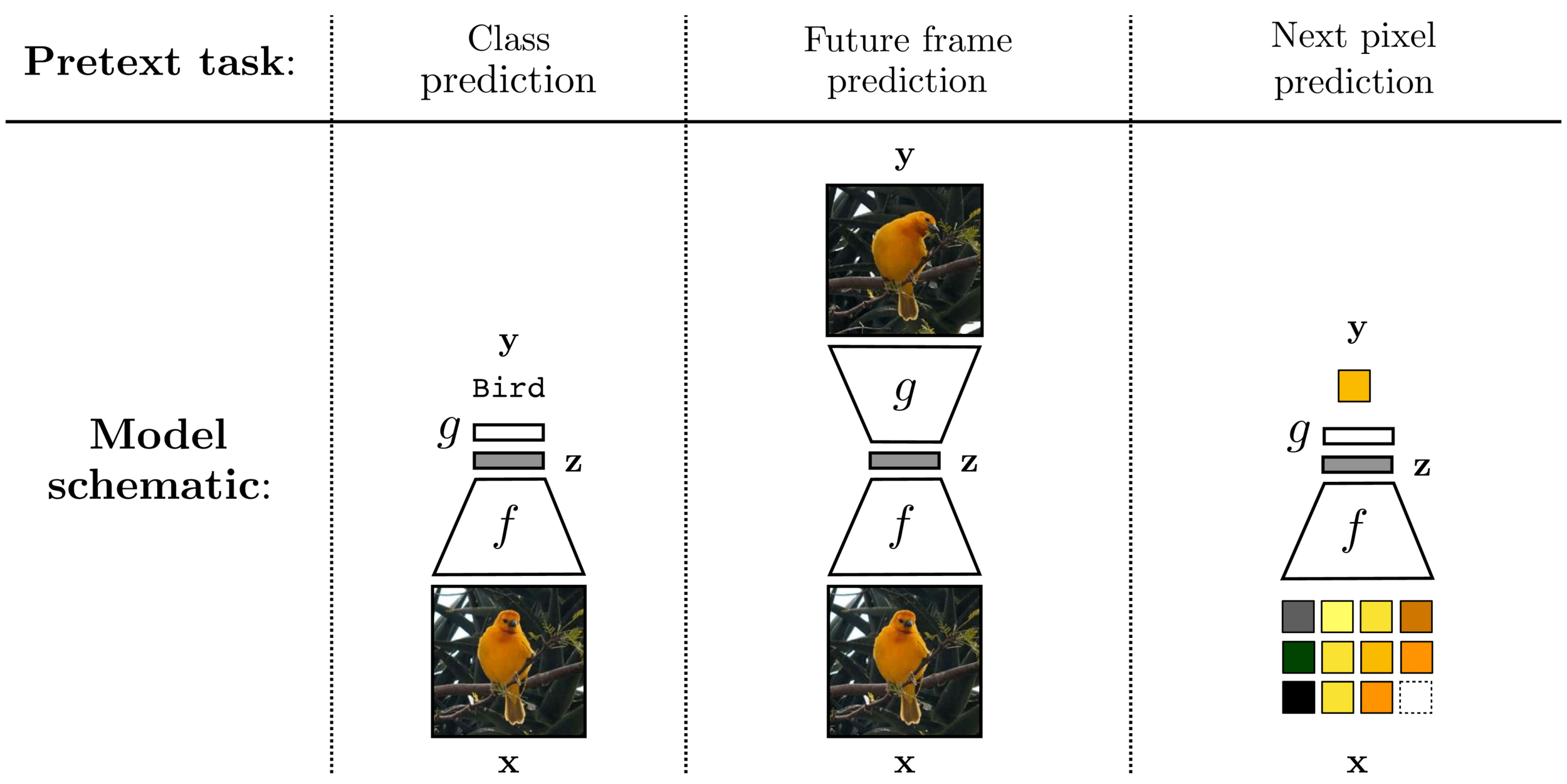
Self-supervised learning
Common trick:
- Convert “unsupervised” problem into “supervised” setup
- Do so by cooking up “labels” (prediction targets) from the raw data itself — called pretext task

The allegory of the cave

[Slide credit: Andrew Owens]
[Owens et al, Ambient Sound Provides Supervision for Visual Learning, ECCV 2016]
[Slide credit: Andrew Owens]
[Owens et al, Ambient Sound Provides Supervision for Visual Learning, ECCV 2016]
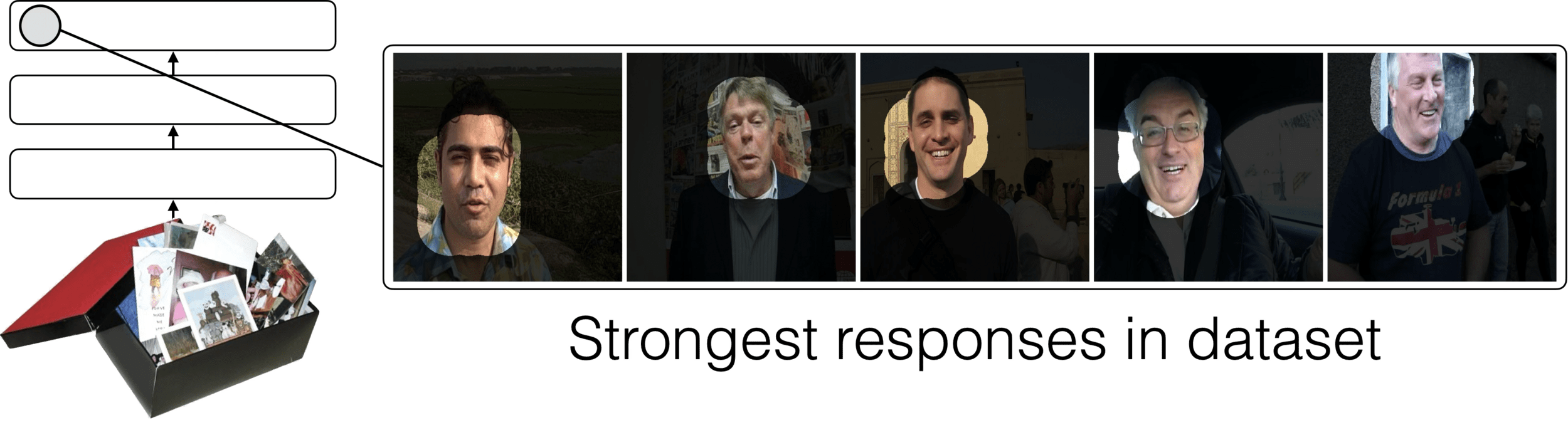
What did the model learn?
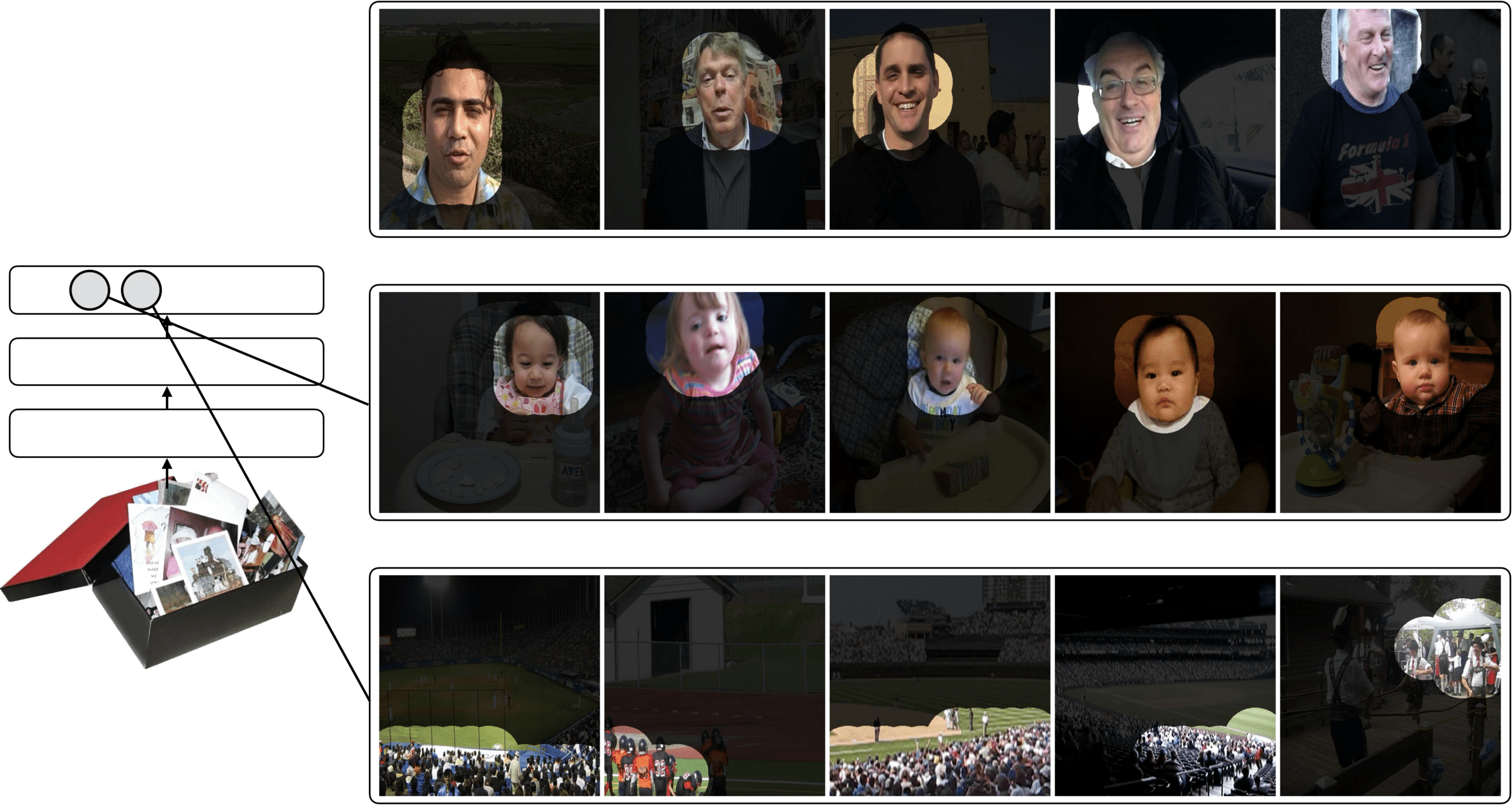
[Slide credit: Andrew Owens]
[Owens et al, Ambient Sound Provides Supervision for Visual Learning, ECCV 2016]
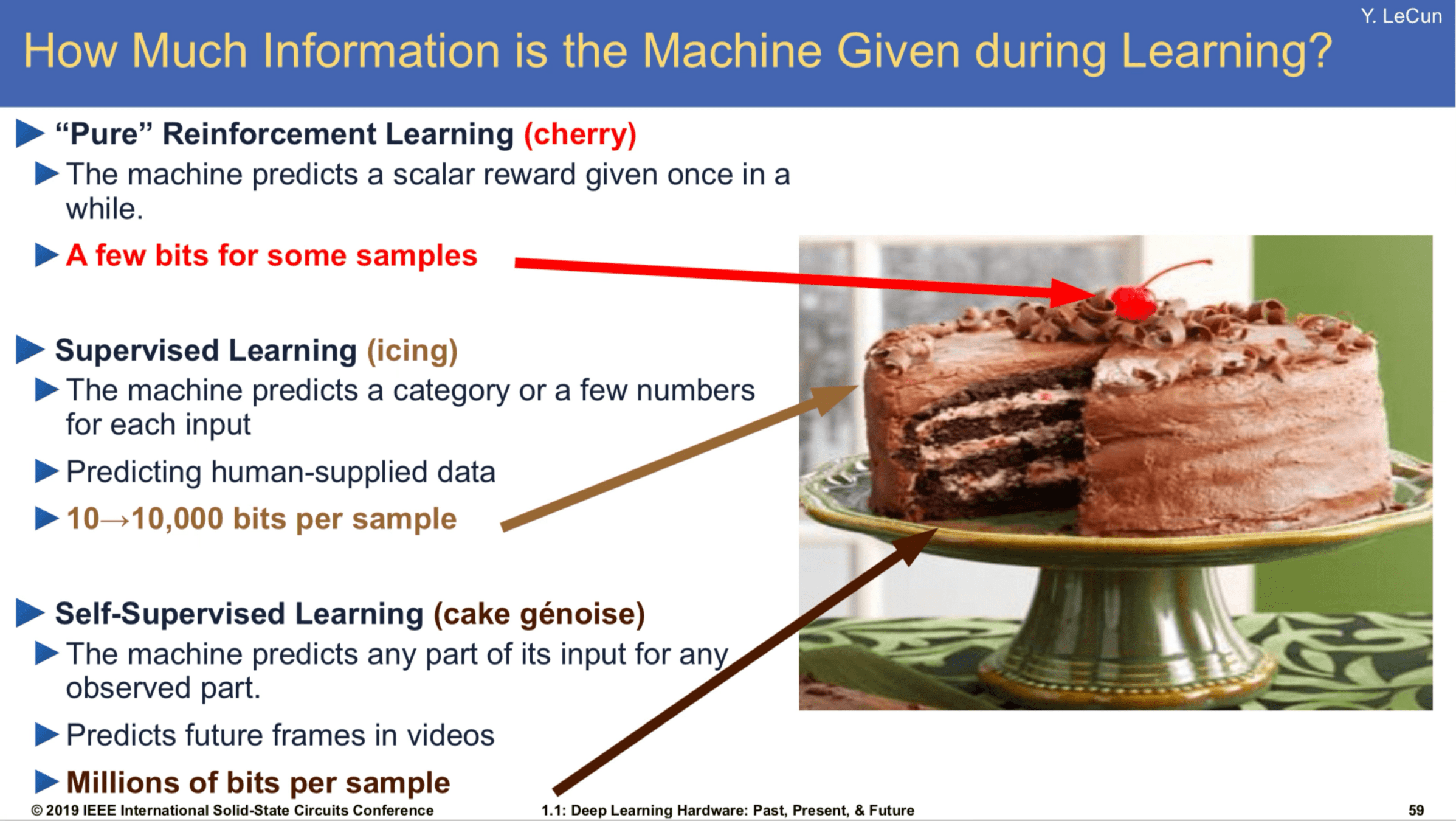
[Slide Credit: Yann LeCun]

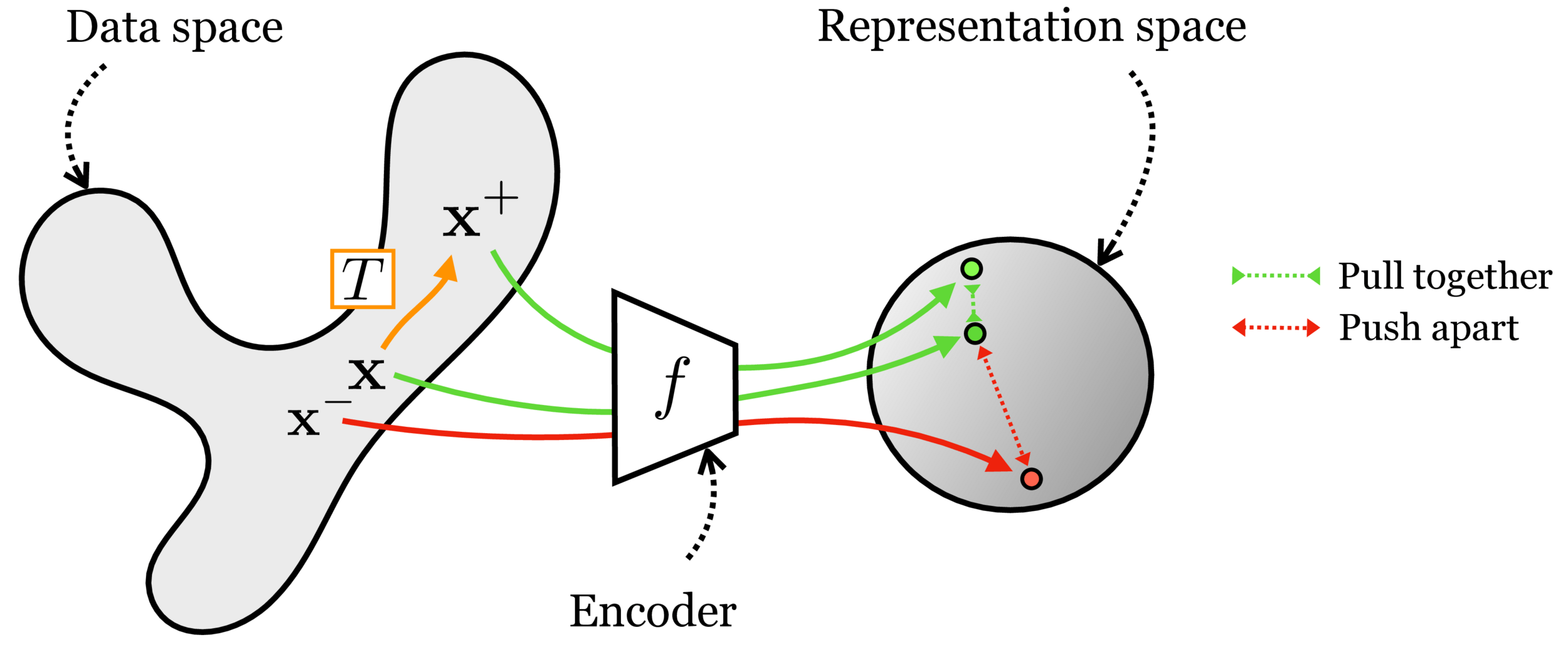
Contrastive learning
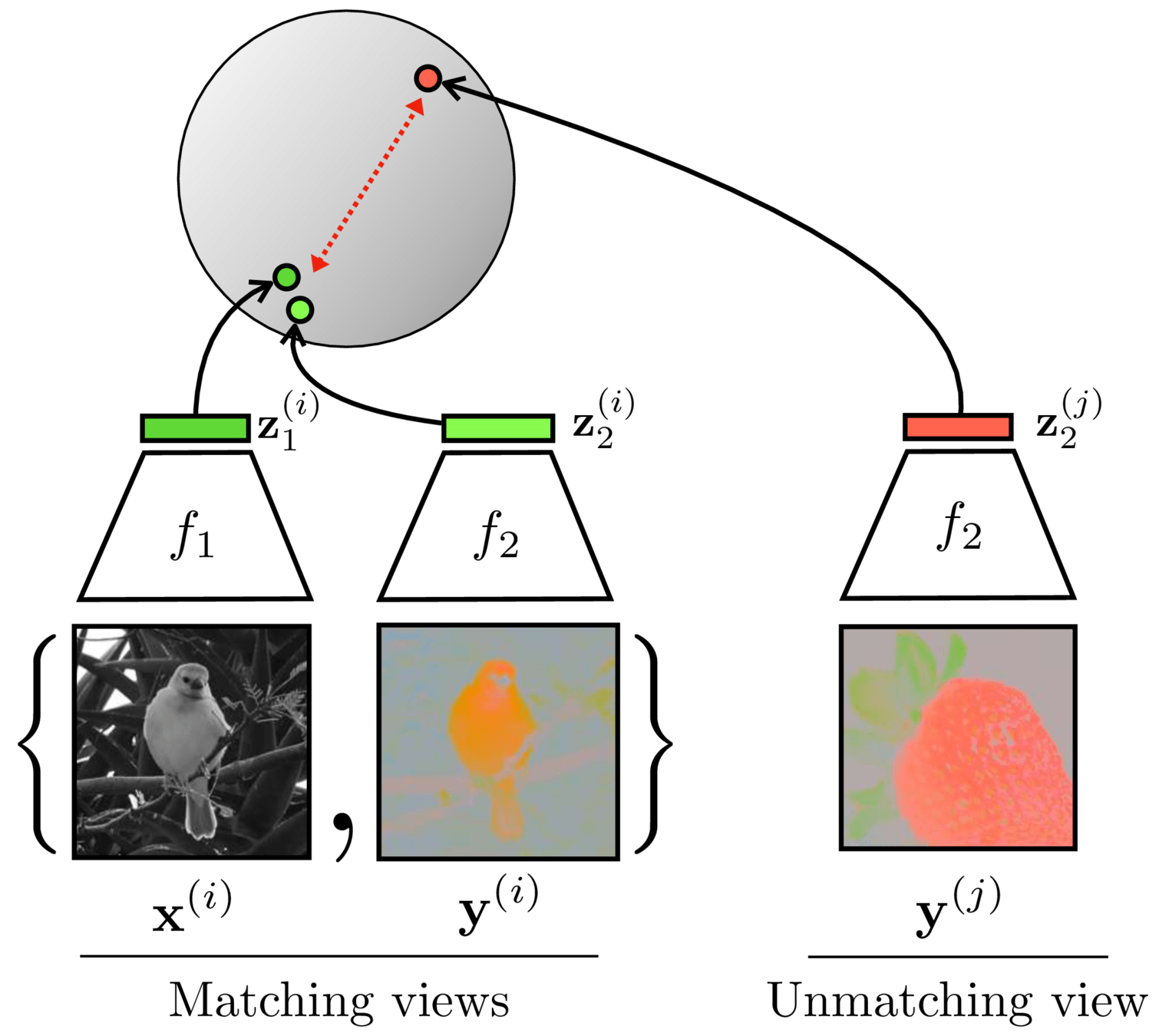
Contrastive learning
[Chen, Kornblith, Norouzi, Hinton, ICML 2020]
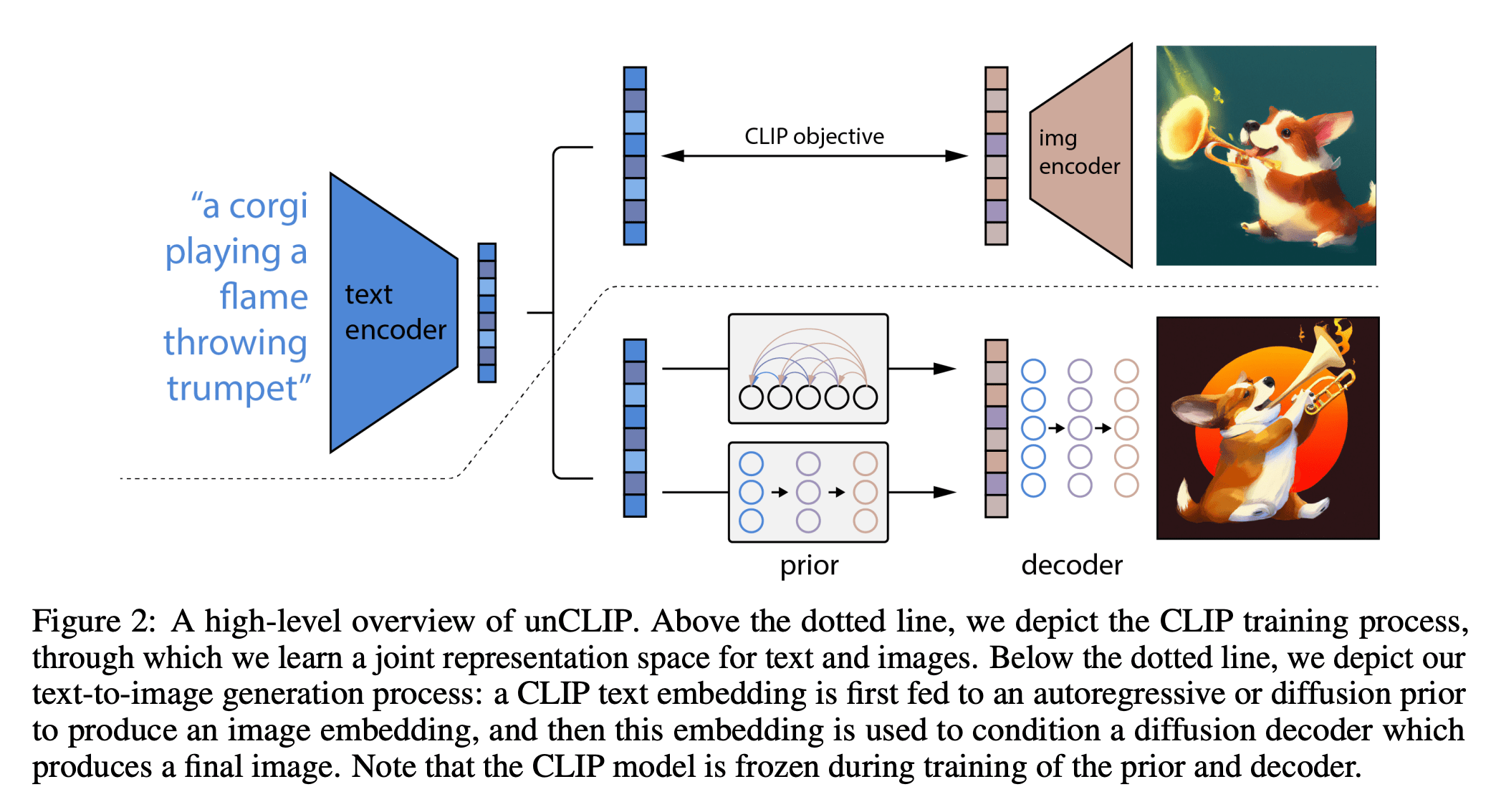
[https://arxiv.org/pdf/2204.06125.pdf]
DallE
\left)
\begin{array}{l}
\\
\\
\\
\\
\\
\\
\end{array}
\right.
Summary
- We looked at the mechanics of neural net last time. Today we see deep nets learn representations, just like our brains do.
- This is useful because representations transfer — they act as prior knowledge that enables quick learning on new tasks.
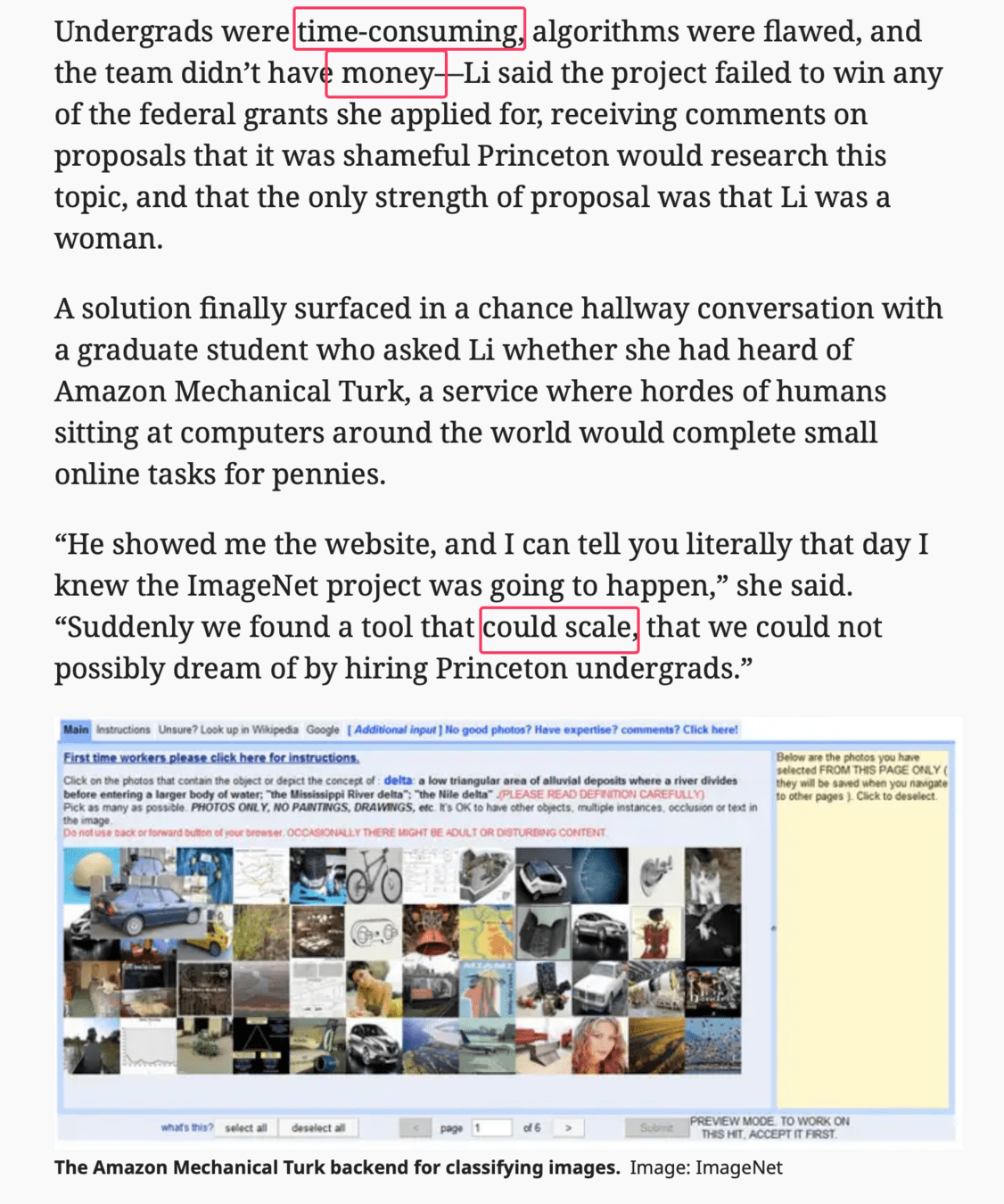
- Representations can also be learned without labels, e.g. as we do in unsupervised, or self-supervised learning. This is great since labels are expensive and limiting.
- Without labels there are many ways to learn representations. We saw today:
- representations as compressed codes, auto-encoder with bottleneck
- (representations that are shared across sensory modalities)
- (representations that are predictive of their context)
Thanks!
We'd love to hear your thoughts.
6.390 IntroML (Fall24) - Lecture 7 Auto-encoders (Representation Learning)
By Shen Shen



