Python y Robótica (Experiencias Personales)
Alejandro Daniel José Gómez Flórez
Estudiante de Ingeniería de Control
@aldajo92





\frac{\partial L}{\partial x_i}-\frac{{d}}{{d}t}(\frac{\partial L}{\partial \dot{x_i}}) = Q_i

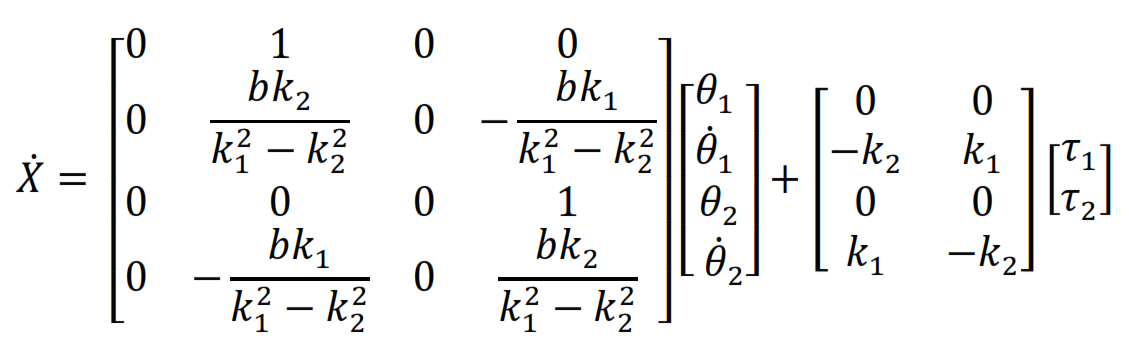
V = \frac{r}{2}(\dot{\theta_1}+\dot{\theta_2})
\dot{\phi} = \frac{r}{2b}(\dot{\theta_1}+\dot{\theta_2})

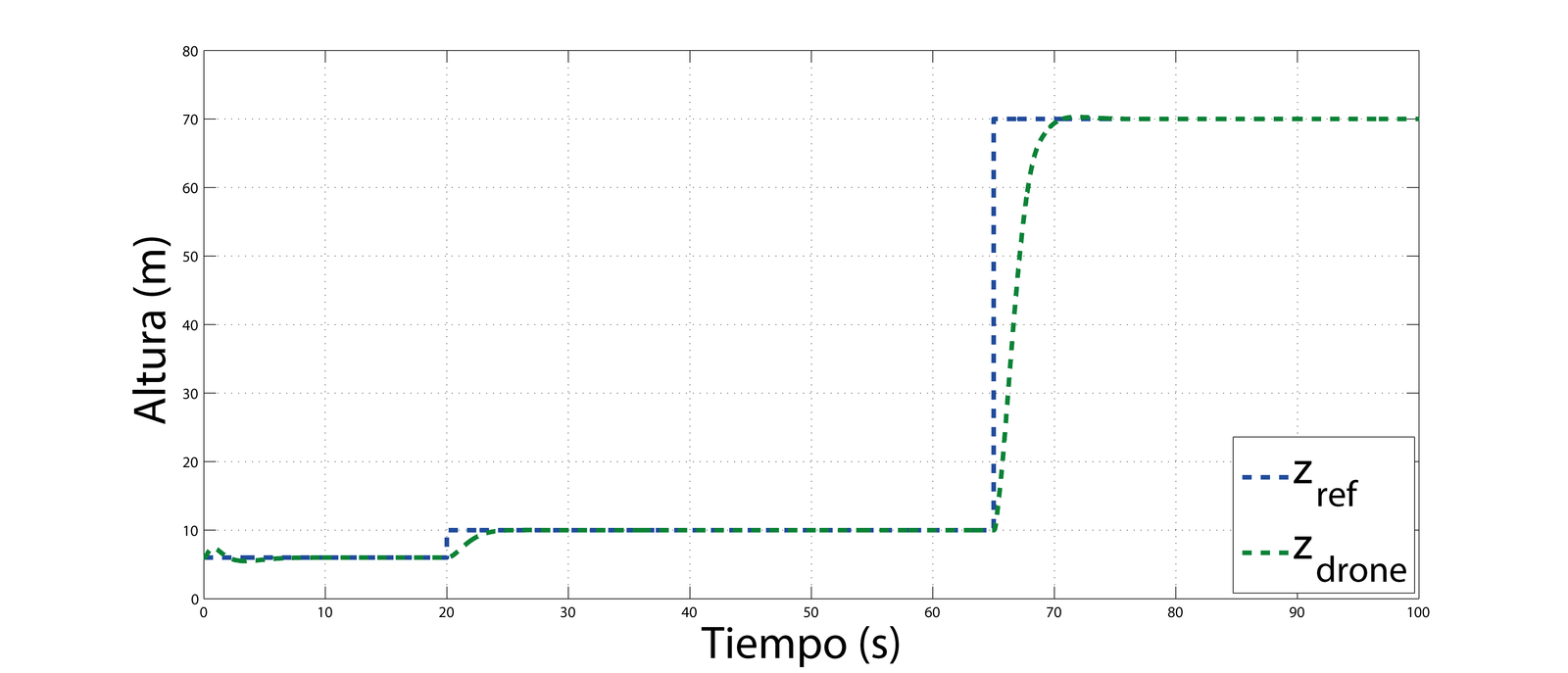
PID
u = k_{p}(e)+k_{i}\int(e)dt + k_{d}\frac{d}{dt}(e)
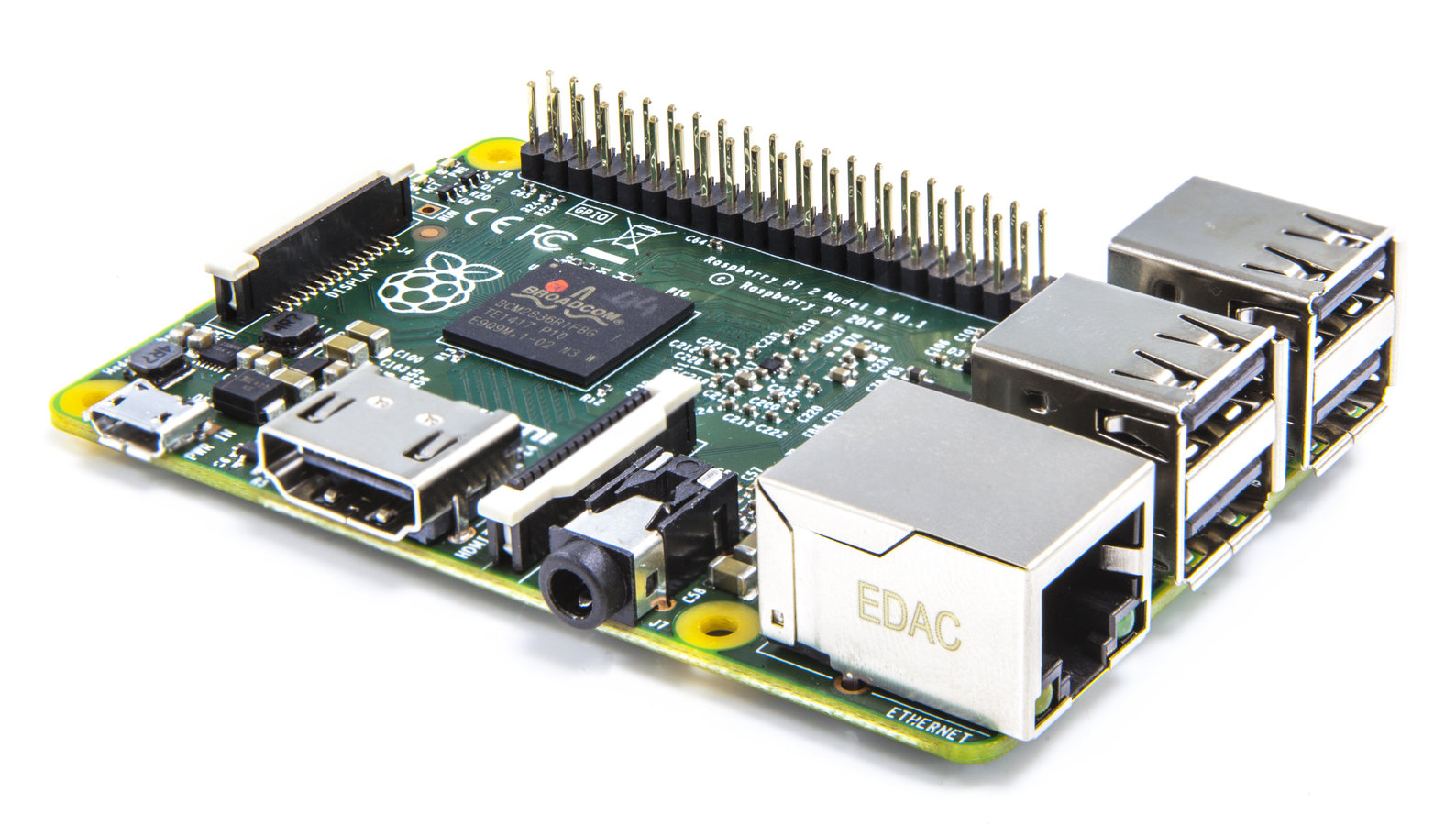
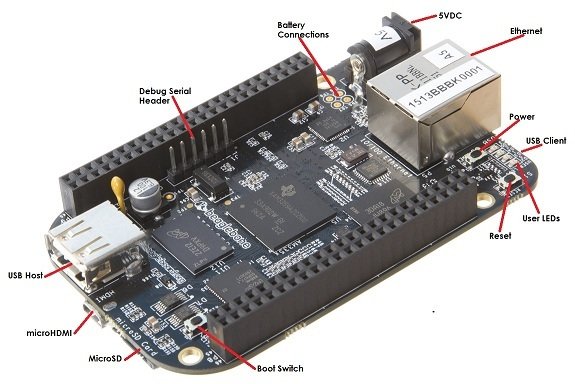
Sistemas Embebidos

Demostración 1...
RaspberryPi + Python
Demostración 2...
Python + OpenCV
Copy of Python y Robotica (Experiencias)
By Alejandro Daniel Jose Gomez Florez