DSTL Satellite Feature Detection
Ibrahim Muhammad
VanDev Slack: @ibrahim
Twitter: @ibrahimm
Outline
- Competition Details
- My Journey
- 4th Place solution
- Other approaches
- Resources
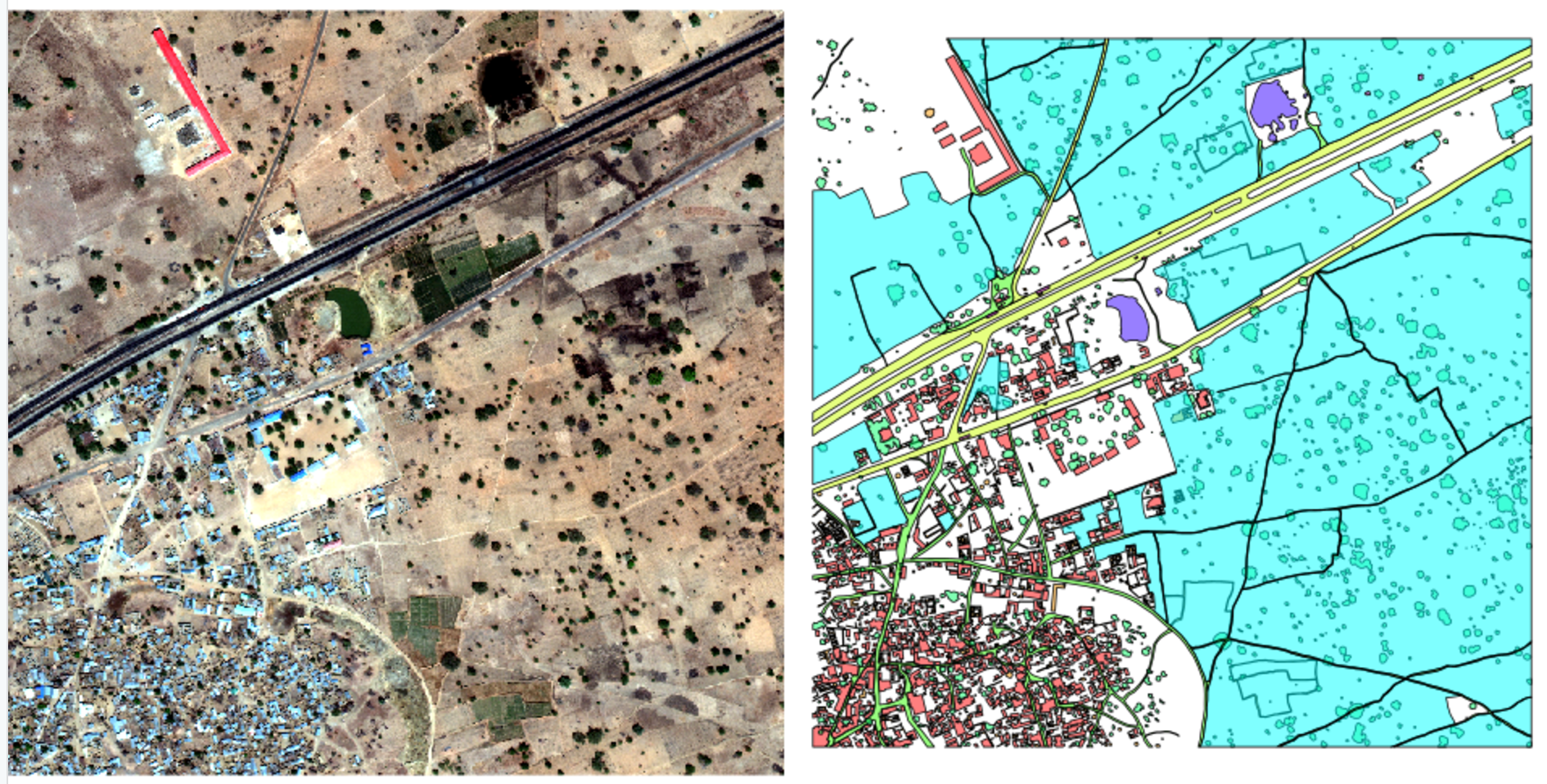
DSTL Competition
Classes
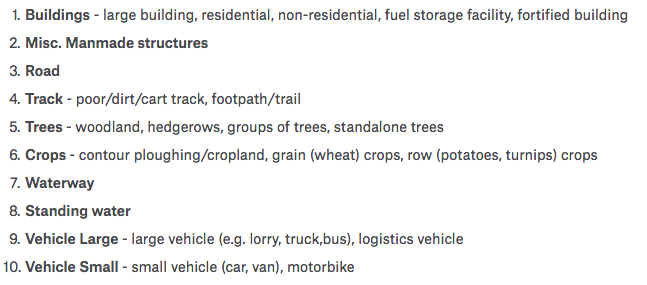
- Classes are not disjoint
- Class imbalance
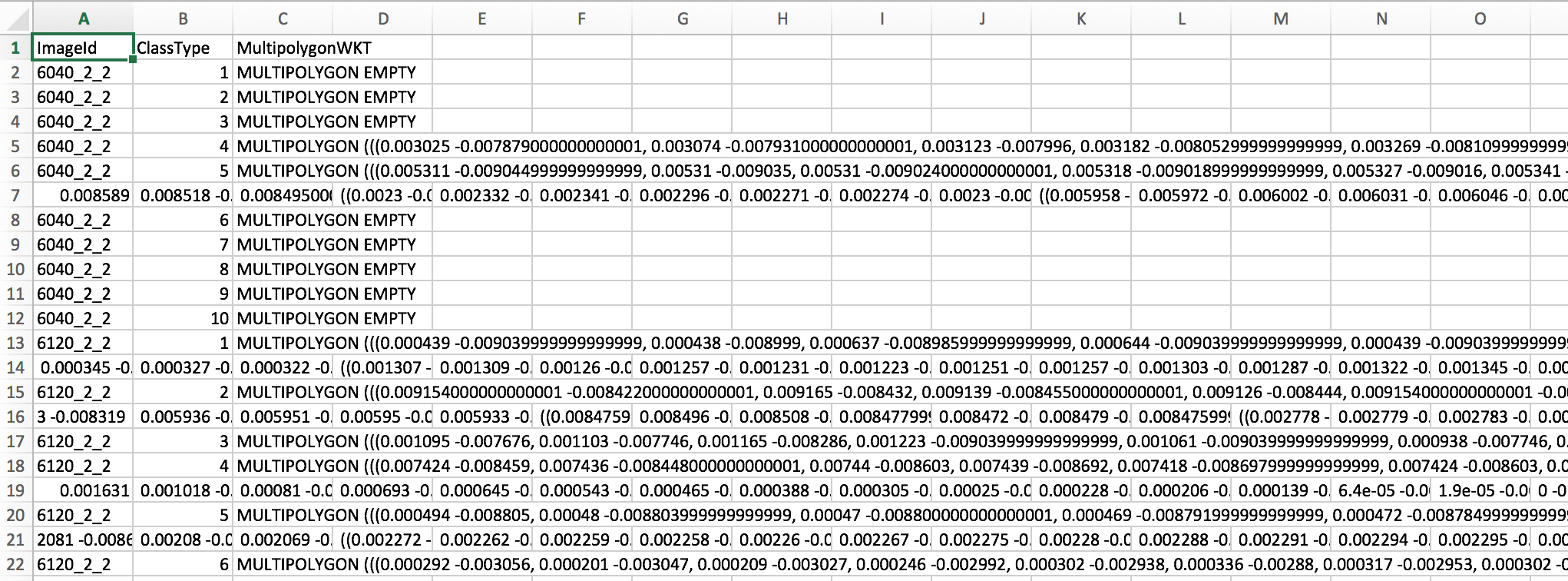
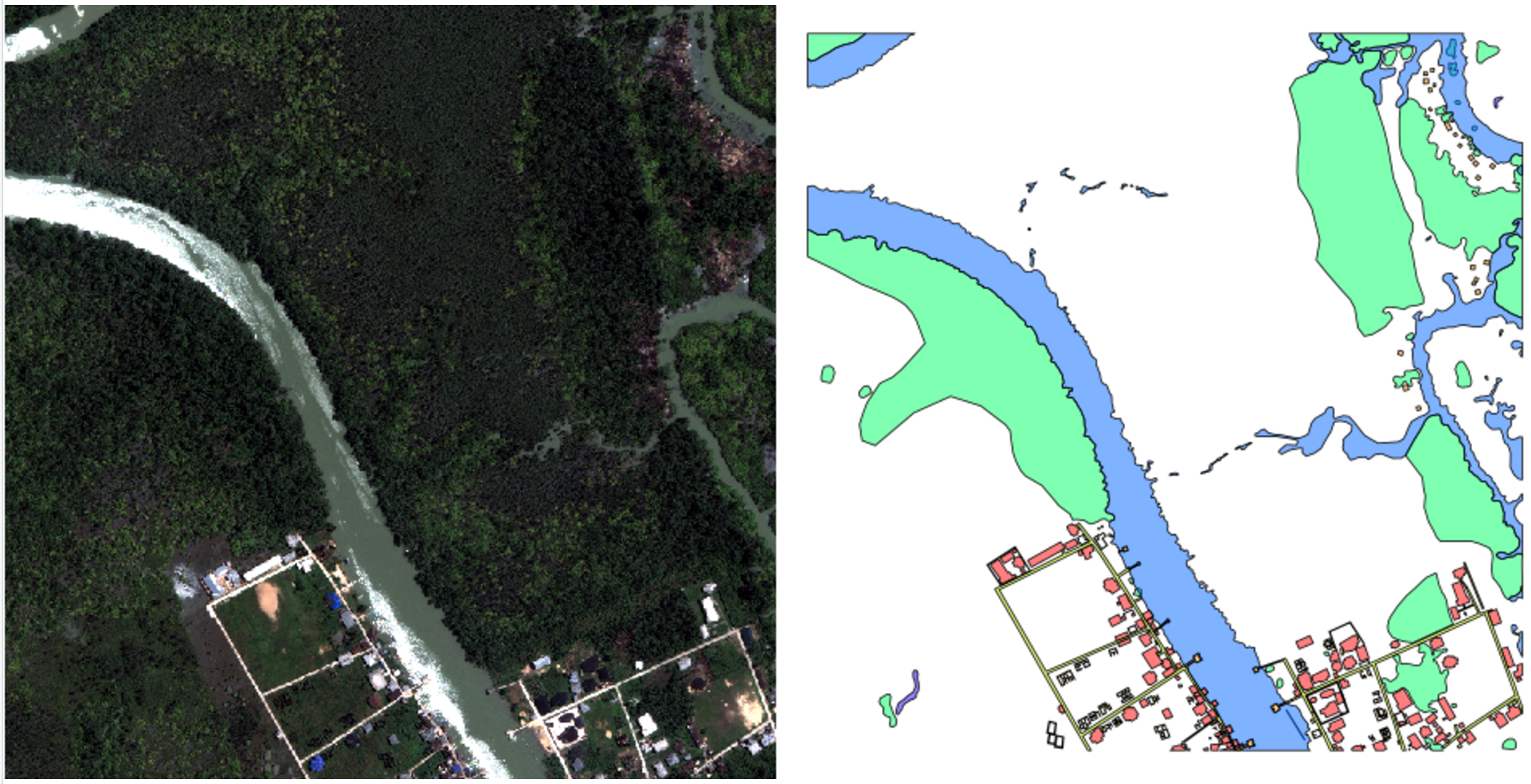
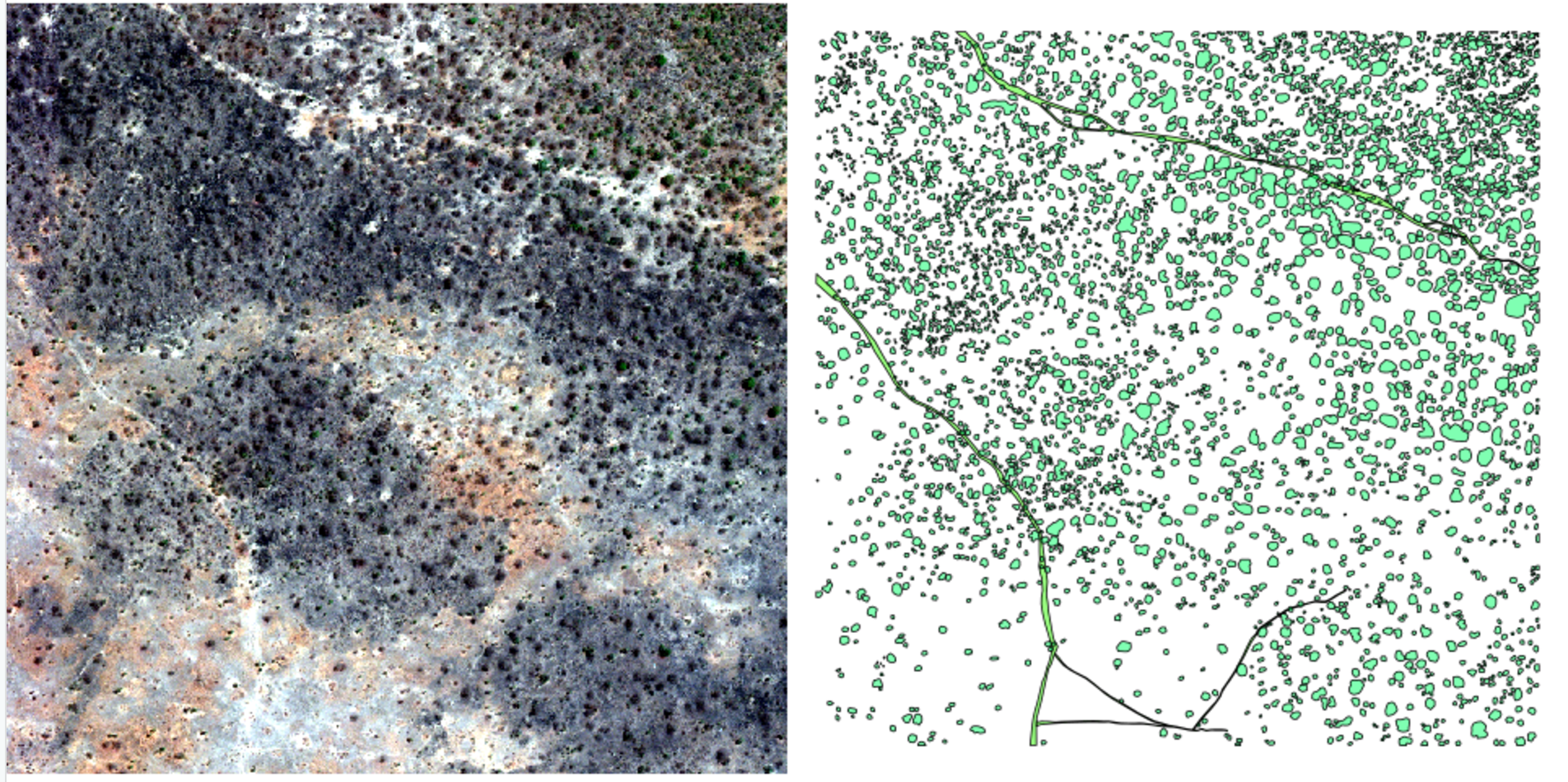
Labels
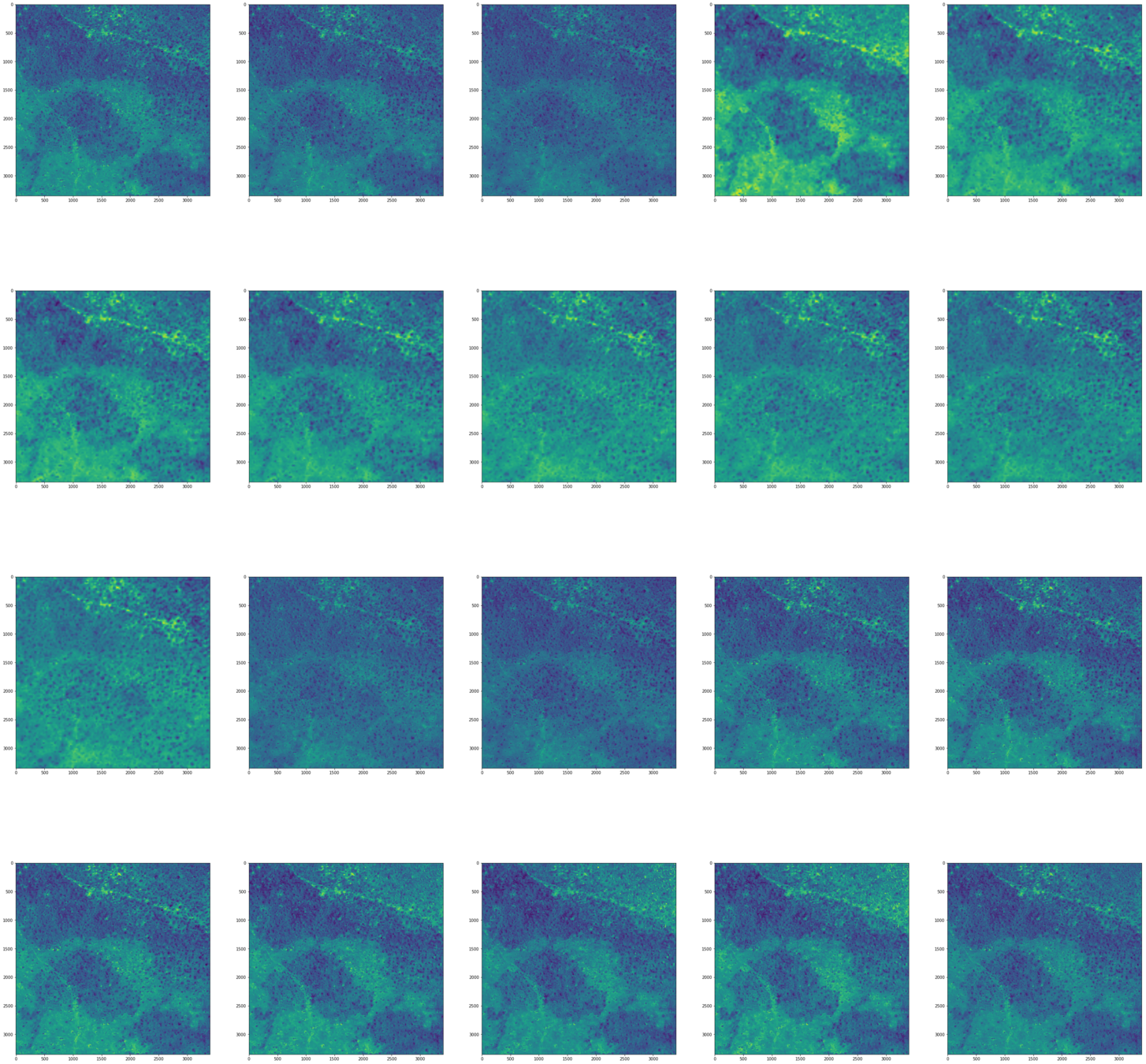
Dataset
- 20 Bands
- Panchromatic (1 x 3348 x 3392)
- RGB (3 x 3348 x 3392)
- Multispectral (8 x 837 x 848)
- Shortwave IR (8 x 134 x 136)
- WorldView 3 Sensor
- 25 Scenes
- 20 GB of images (zipped)
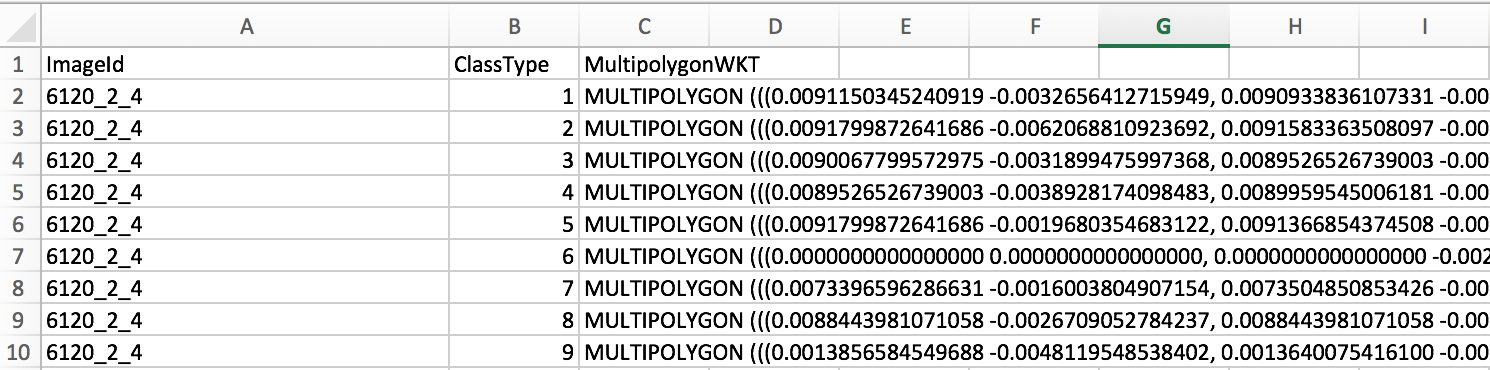
- Geometries in WKT and GeoJSON
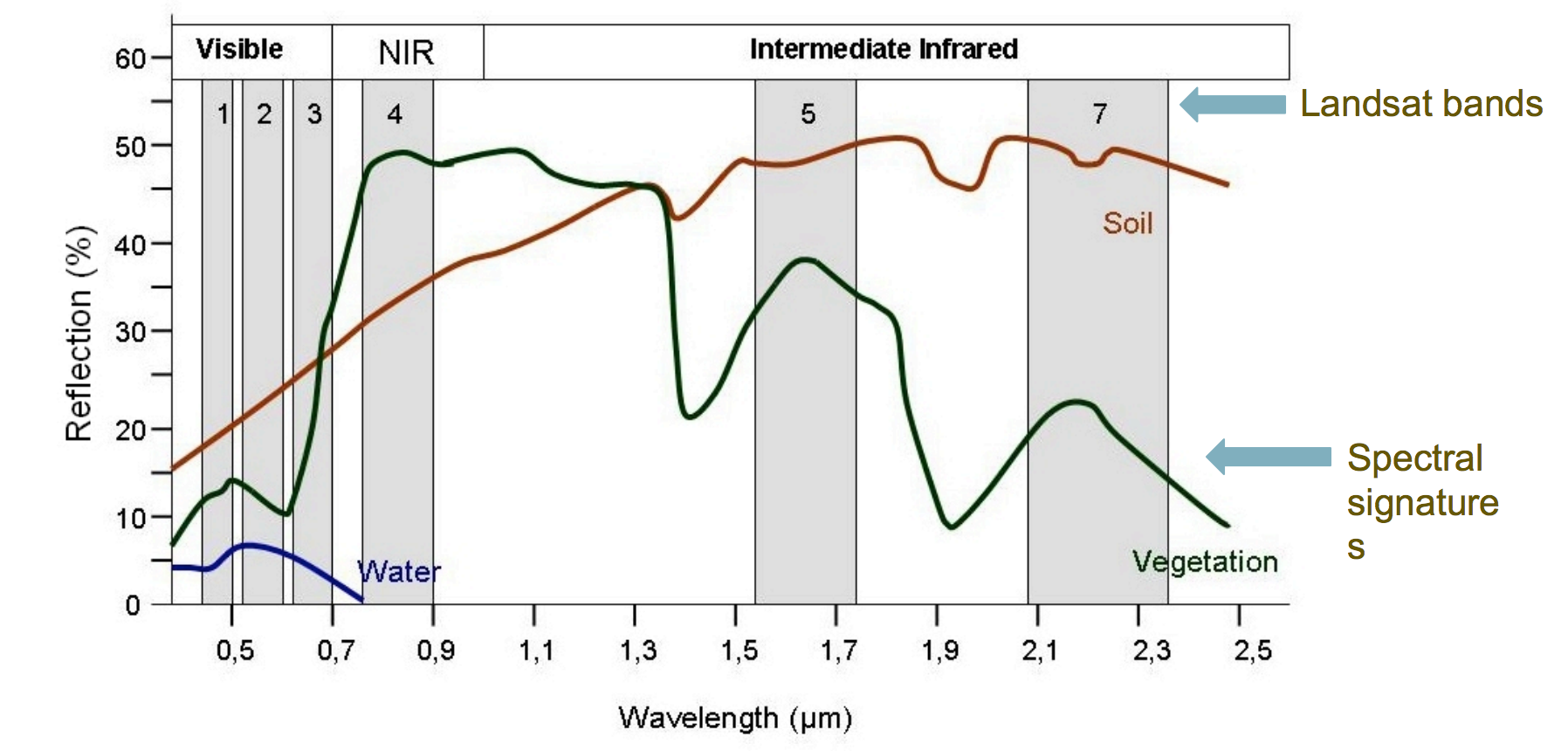
Spectral Signatures

Submission
Evaluation
- Intersection over Union
- Average for all 10 classes
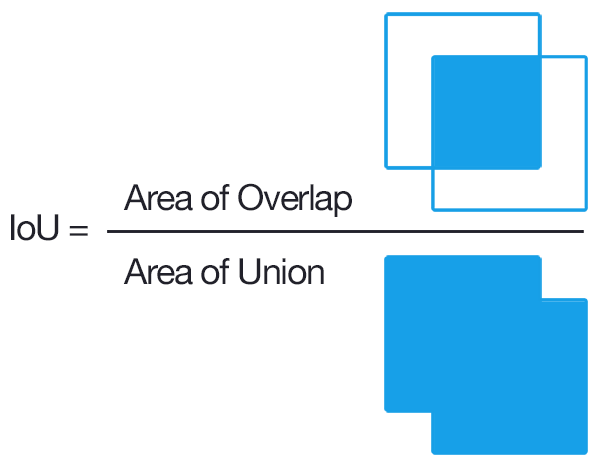
Winning Solution 0.49
My Journey
Background
- Machine Learning
- Andrew Ng's course
- Masters: Neural nets and reinforcement learning
- Small side projects
- Convolution Neural Networks for Visual Recognition
- UrtheCast
Tools
- Python 3
- Jupyter
- Keras / Tensorflow
- Matplotlib
Image libraries
- Shapely
- Descartes
- OpenCV
Preprocessing
- Scaling WKT to pixels dimensions
- Burning masks from WKT
- Resizing bands
- Concatenated bands for input (20 x 3350 x 3400)
- Scaling images between 0 and 1
Model: Autoencoder

Training
- Split
- 80% training (20 images)
- 20% validation (5 images)
Computational Challenges
-
Out of Memory
- Generators with Keras
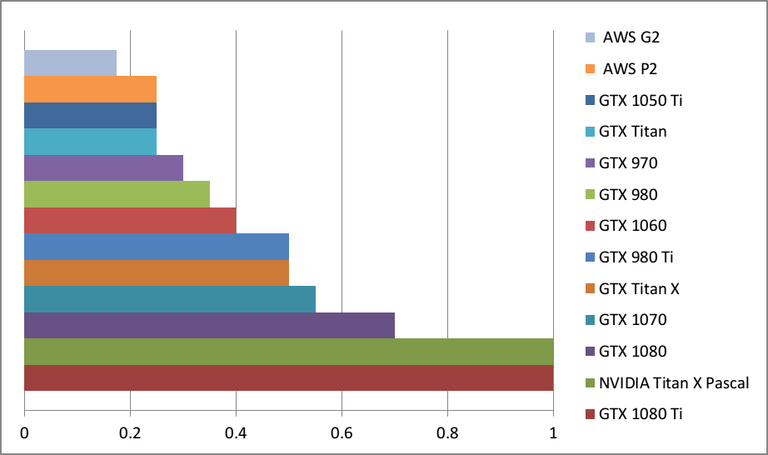
- Slow - Lack of GPUs
- Macbook pro
- Nvidia GPUs
- Azure Notebooks
- AWS Spot P2 instances
Pixel by Pixel
- Simpler
- One model
Postprocessing
- Create vector geometries from rasters
- Raster to WKT
- Prepare submission file
Kaggle Competition
- Pre and post processing Kernels
- Mainly Python and Keras
- Full pipelines you can start off from and improve
- Prevalent U-nets for high scores
4th Place Solution
deepsense.io
Preprocessing
- Resizing
- Alignment
- Zero mean and unit variance
- Concatenating bands
Data Augmentation
- Random flipping
- Random Rotation
- Color Jiittering
Training
- 256x256 pixel patches
- Half of the patches contained positive pixels to handle class imbalance
- Each class model took two days on a single GTX 1070
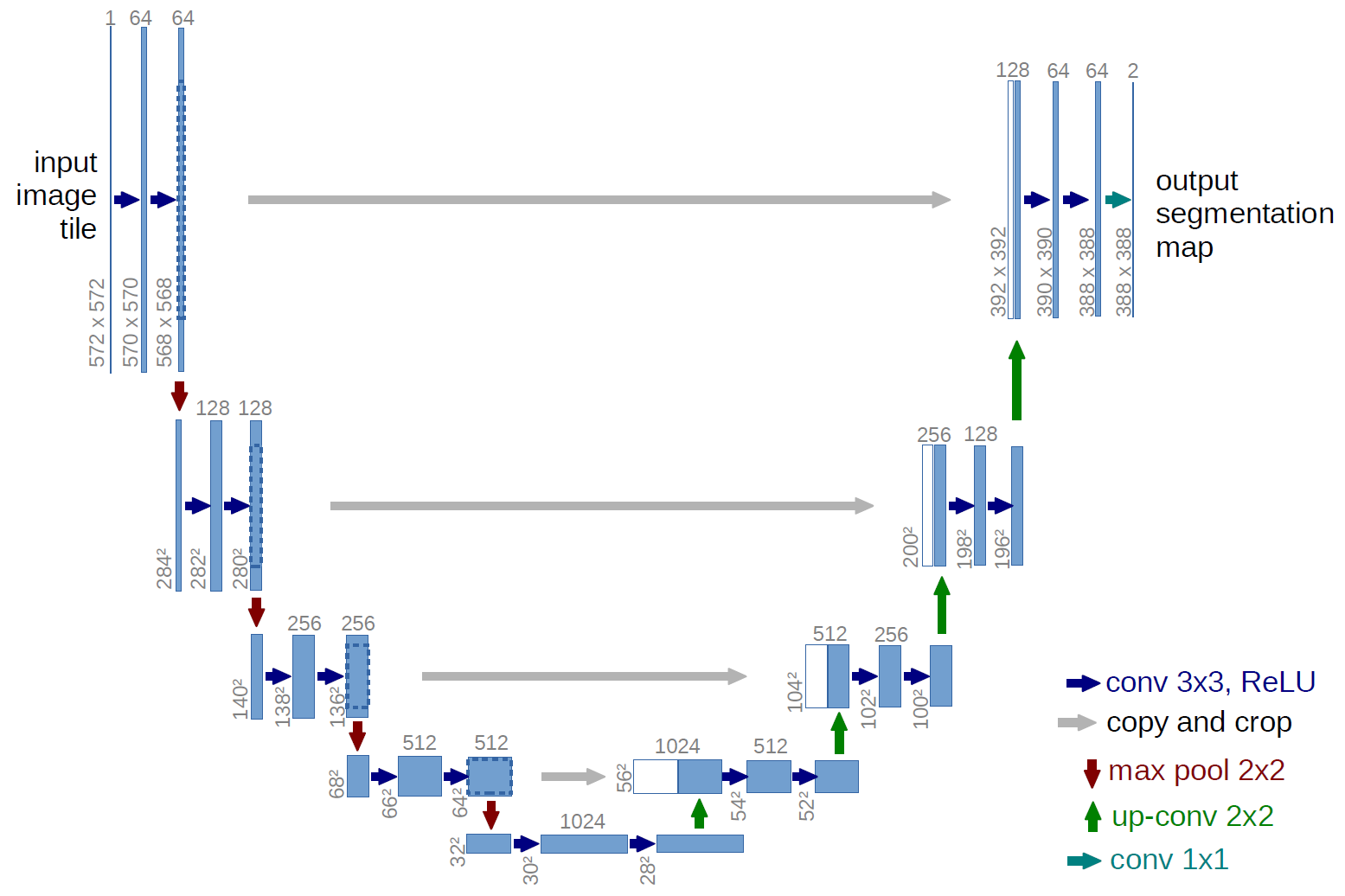
U-net Architecture
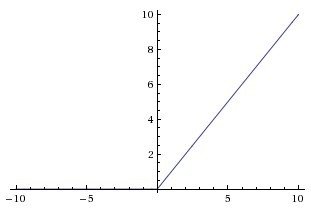
ReLU
Convolution Layers
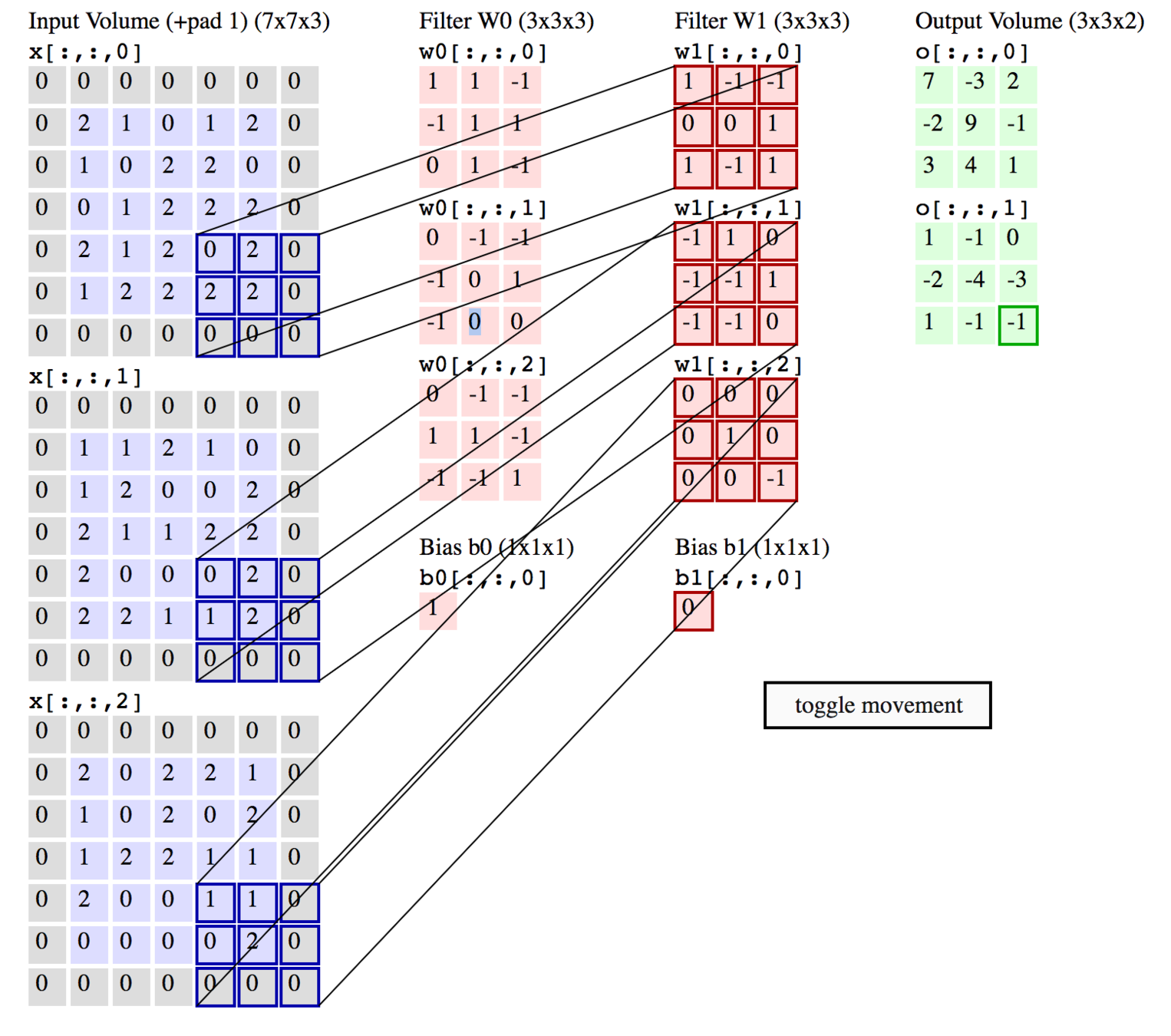
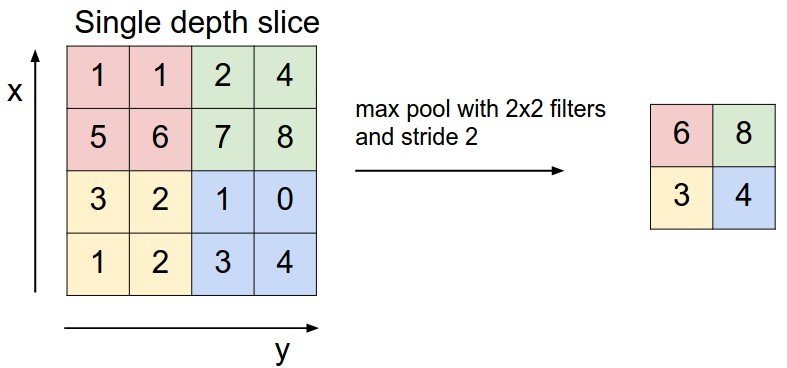
Max Pooling
U-net Architecture
Network Architecture
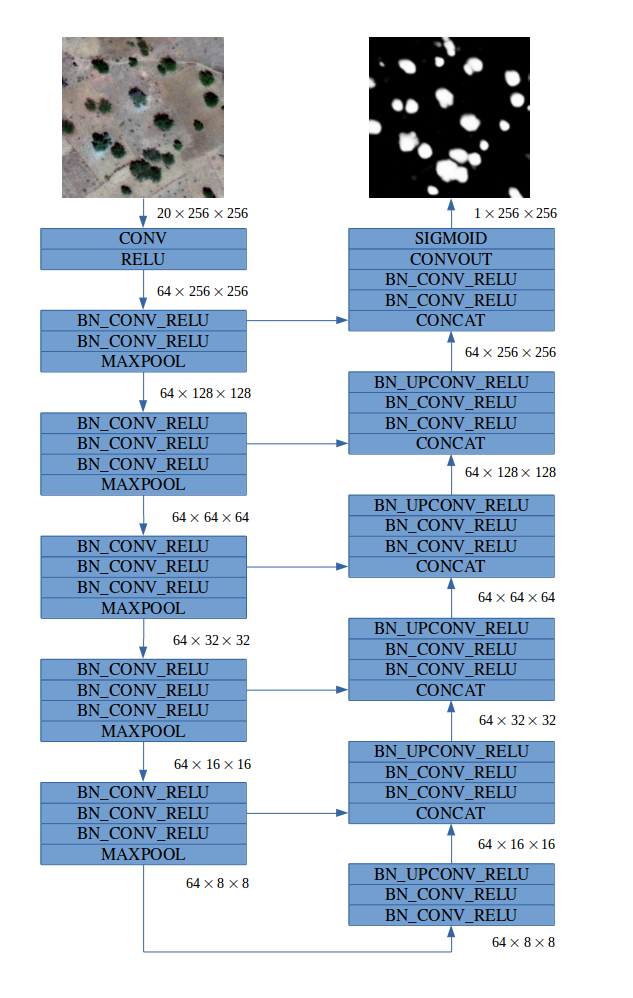
Up-conv and copy and crop in Keras
up6 = merge([UpSampling2D(size=(2, 2))(conv5), conv4], mode='concat', concat_axis=1)
conv6 = Convolution2D(256, 3, 3, activation='relu', border_mode='same')(up6)
conv6 = Convolution2D(256, 3, 3, activation='relu', border_mode='same')(conv6)Special Models
- Waterway
- Linear regression and random forest per pixel
- Large and small vehicles
- Not enough data
Predictions
- Sliding window with stride 64 on 256x256 patches
- Improve predictions on boundaries
- Averaged results for flipped and rotated version of image
Other Approaches
Other Techniques
- Using fewer bands (e.g. M bands only)
- Hard Negatives
- Ensemble on polygons (Union or intersection)
- Augmenting data for classes with fewer examples
- Dropout
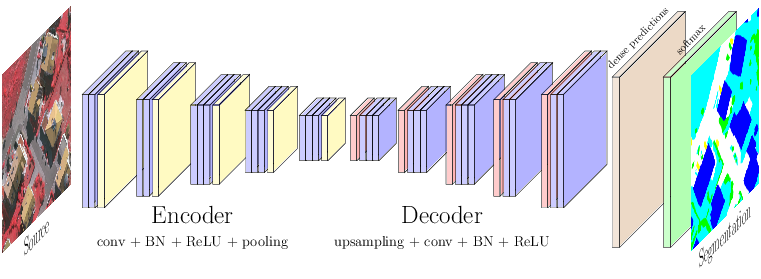
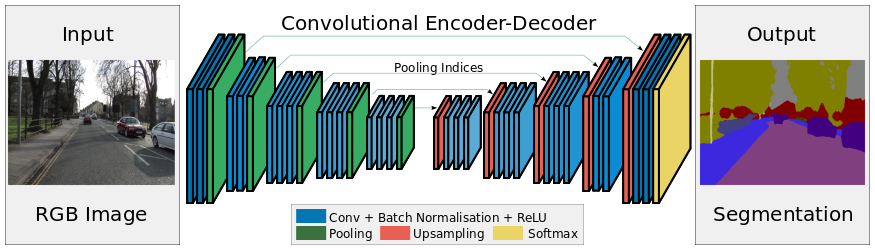
Convolution Encoder Decoder
Satellite Feature Detection Datasets
Papers and Blogs
Code
Kaggle Satellite Feature Detection
By Ibrahim Muhammad



