Research Assistant - Digital Therapy, Data Analytics & Mobile Computing - CSS Health Lab.
Applicant: Chen-Hsuan (Iris), Shih

Iris Shih
iris.cshih@gmail.com
Iris Shih
iris.cshih@gmail.com
About Me
Iris Shih
M.S Computer Science at Technical University of Munich
Enjoy doing research in Healthcare field
From Taiwan
Love to go hiking and do sports
Where I obtained my bachelor degree in computer science.
Gain knowledge, Practical projects, Organizing events and started to get interest in research.
Master thesis on the topic of improving current device navigation system for diagnosis.
Besides school work, go hiking or play squash with friends are the best!
Iris Shih
iris.cshih@gmail.com
About Me
Education
Iris Shih
2012 - 2015
2008 - 2012
B.S Computer Science
Major in Business Informatics
Tamkang University, Taipei, Taiwan
M.S Computer Science
Major in Computer Vision (Biomedical Computing)
Technical University of Munich, Munich, Germany
Iris Shih
iris.cshih@gmail.com
About Me
Projects
Iris Shih
Student Software Developer
Adesso Profile & Game App.
An IOS mobile app. for the consultant company - Adesso.
Master Thesis
Inside-Out Tracking for Medical Application
Using a single optical camera to improve current device navigation system.
IDP Project
Analyzation Toolkit for 3D Lookup Tables
An UI application for analyzing gamma camera acquisition.
Independent Project
BioJavaScript 2.0.
An open-source JS library for visualizing biological data.
Iris Shih
iris.cshih@gmail.com
About Me
Outside University
Iris Shih
Co-Founder
Co-Organizer
Deep Learning Meetup Munich
ACM Munich Student Club
Founding chair of ACM Student chapter in Munich.
Organizing regular meetups to discuss about machine learning/deep learning.
President
TKU Student Council
Leader of the Department of Innovative Information and Technology council.
Iris Shih
iris.cshih@gmail.com
About Me
Some Interests
Iris Shih
Language
CS Skills
C++, JavaScript, Matlab
Learning German
... still in action! Currently A1.2 level!
Love Github and Sublime
Sports
Basketball, Badminton, Squash, ...
Basically I love all kinds of sports!
Iris Shih
iris.cshih@gmail.com
@ TUM
Research Project
Marker-based Inside-out Tracking for Medical Applications
Using a Single Optical Camera
Student: Chen-Hsuan, Shih (Iris)
Supervisor: Prof. Dr. Nassir Navab
Master of Biomedical Computing
Computer Aided Medical Procedure(CAMP),
Technical University of Munich, Germany

Advisor: Philipp Matthies
Motivation


Motivation
Outside-in Tracking
2
doctor
patient

nurse
line of sight problem ! -> Miss Tracking
Motivation
3
doctor
patient
doctor
patient
nurse
Motivation
4
Inside-out Tracking
-
State-of-The-Art
-
Tracking System
-
Multi-Tracker-App.
-
Experiment
-
Results & Evaluation
-
Discussion
-
Future Works
Road Map
5
Road Map
6
-
State-of-The-Art
-
Tracking System
-
Multi-Tracker-App.
-
Experiment
-
Results & Evaluation
-
Discussion
-
Future Works
State of the art tracking technology
Inside-out Tracking
Similar application for solving line-of-sight
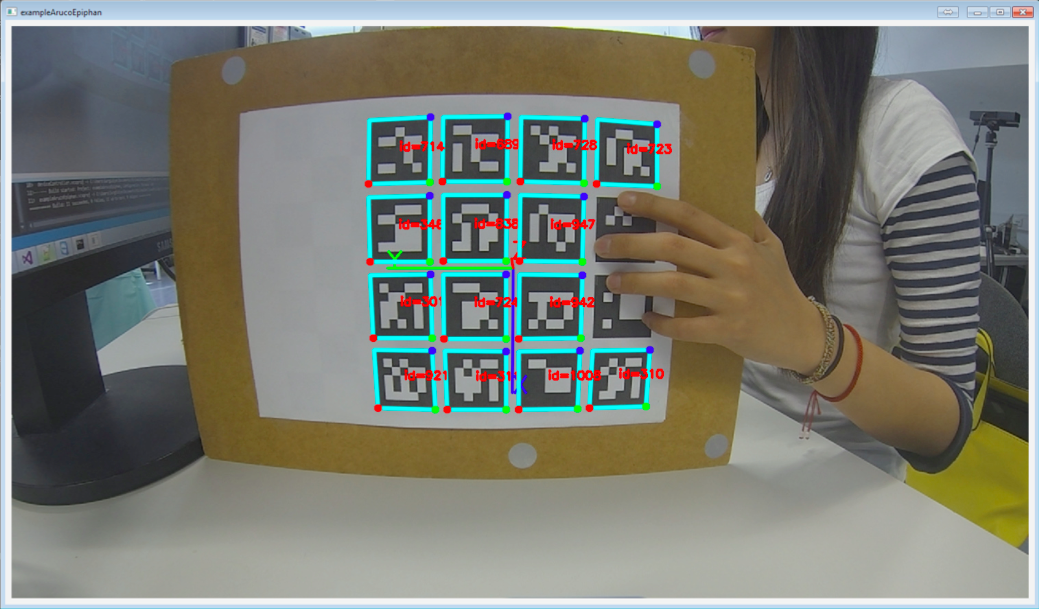
State-of-the-Art: Marker-Based Tracking
Really Robustness in Occlusion ,Wrapping , Lens Distorsion
[1]Olson, E., AprilTag: A robust and flexible visual fiducial system, ICRA, 2011
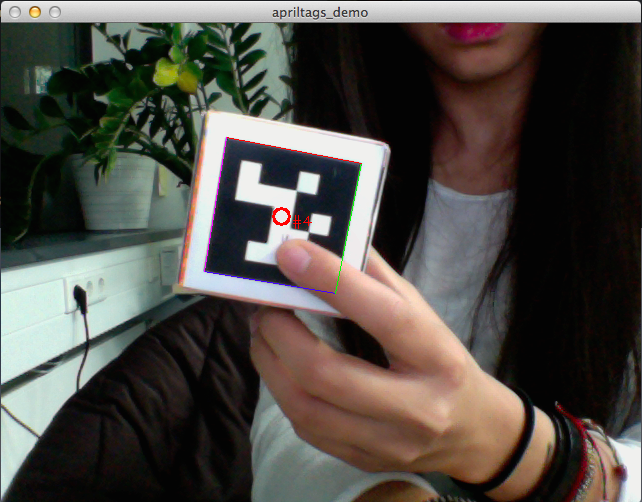
[2] S. Garrido-Jurado, Automatic generation and detection of highly reliable fiducial markers under occlusion, Pattern Recognition, 2014
7
AprilTags [1]
ArUco [2]
Inside-out Tracking Application
8

ClearGuide [4]
Panorama ultrasound for
[4]Clear Guide Medical. http://clearguidemedical.com/ (accessed 3/6/2015).
[3] Hedyeh Rafii-Tari. Panorama ultrasound for guiding epidural anesthesia: a feasibility study. IPCAI’11 2011
guiding epidural anesthesia [3]
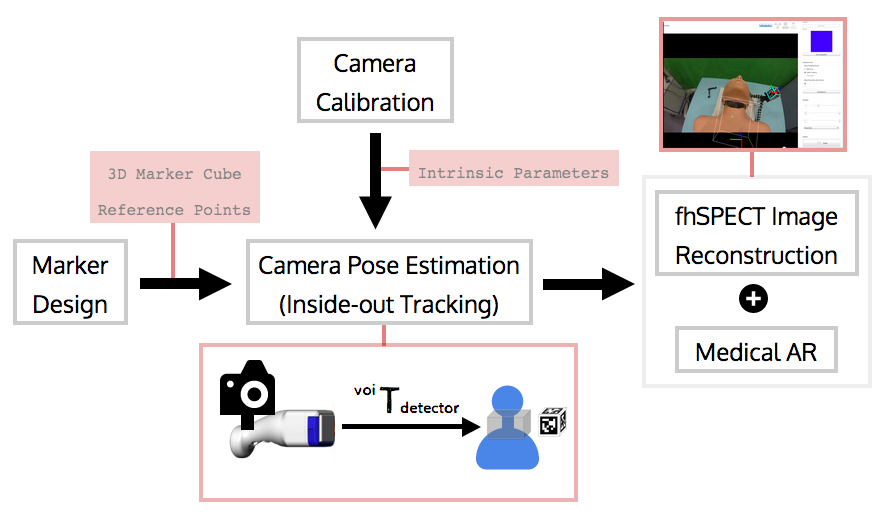
Marker-based tracking setup
Extract information from tracking
Multi-marker tracking model
Get the detector transformation matrix
Complete transformation for reconstruction
Road Map
9
-
State-of-The-Art
-
Tracking System
-
Multi-Tracker-App.
-
Experiment
-
Results & Evaluation
-
Discussion
-
Future Works
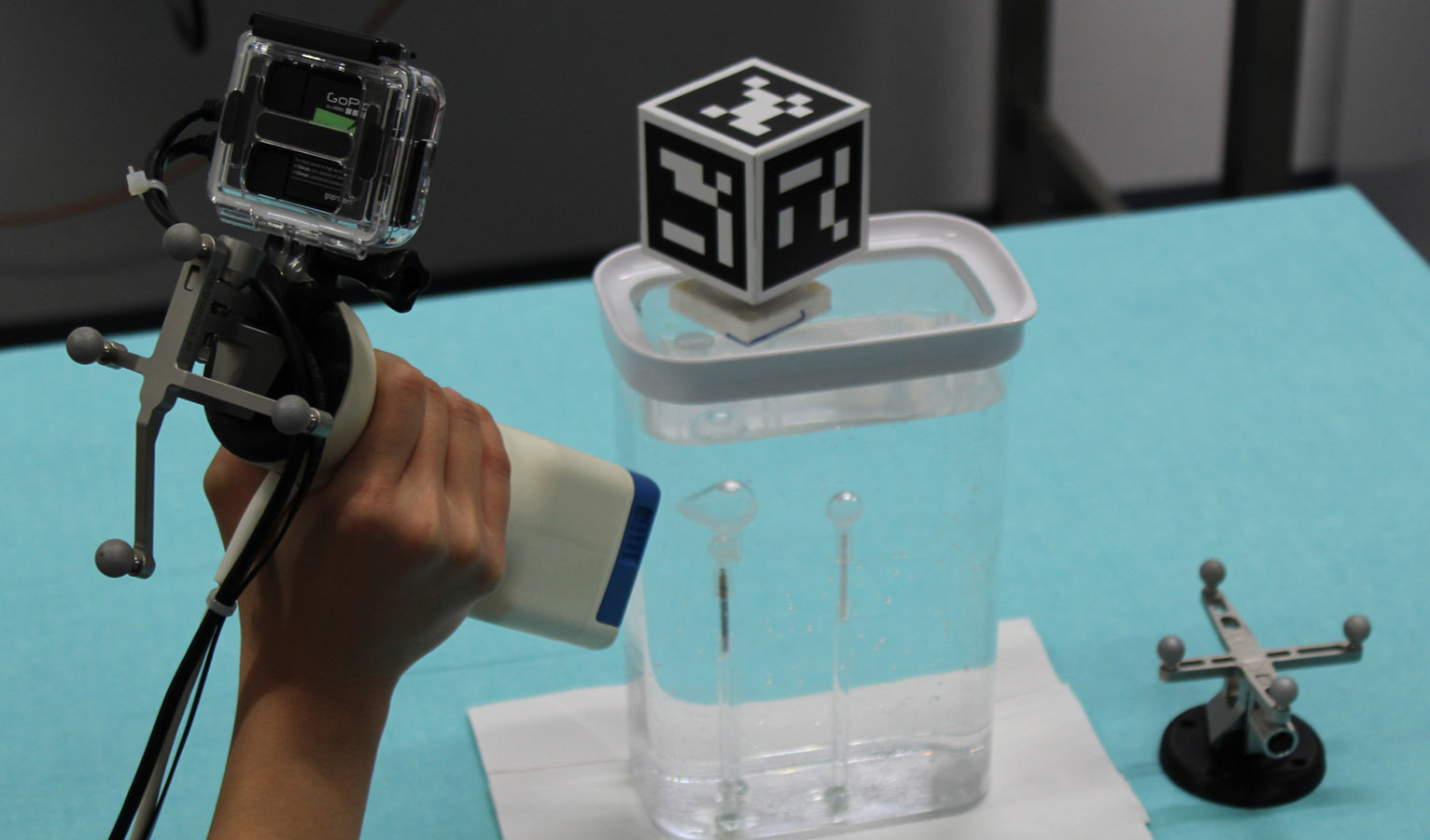
Technical Setup
GoPro Camera

Calibrator
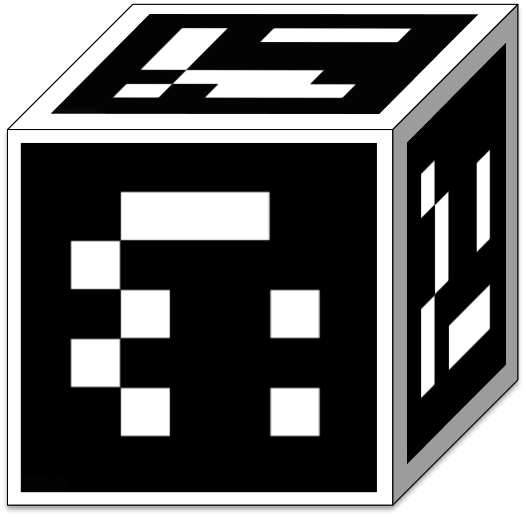
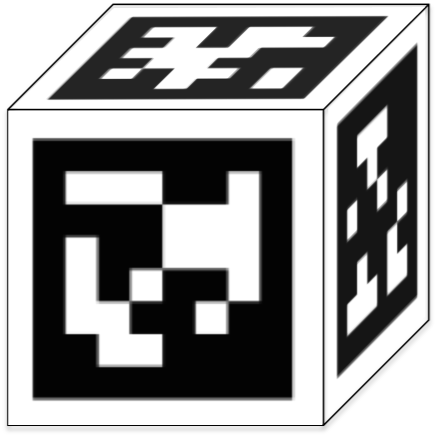
3D Marker Cube
10
(Reference Target)
Gamma Camera
Marker-Based Tracking
Gamma Camera
Tracking System
?
Calibrator
patient
Image reconstruction
11
Cube Target
Tracking Transformation T1
camera --> marker cube
GoPro Camera
Gamma Camera
12
Tracking System
Cube Target
Tracking Transformation T2
camera --> calibrator
GoPro Camera
13
Tracking System
T1
Cube Target
Tracking Transformation T3 calibrator --> Detector
GoPro Camera
Gamma Camera
Tracking Transformation T3 calibrator --> Detector
T2
14
Tracking System
T1
Cube Target
GoPro Camera
Gamma Camera
T3
T1
T2
T3 x
T1
T2 x
Ttarget =
14
Tracking System
detector
-1
-1
Cube Target
GoPro Camera
Gamma Camera
T3
T1
T2
Cube Target
15
Tracking System
-1
patient
Volume of interest
Ttarget
detector
GoPro Camera
Gamma Camera
T3
T1
T2
T
Cube Target
16
Tracking System
-1
patient
Volume of interest
-1
Tdetector
voi
Multi-Marker Model + ArUco Tracking Framework
(voi)
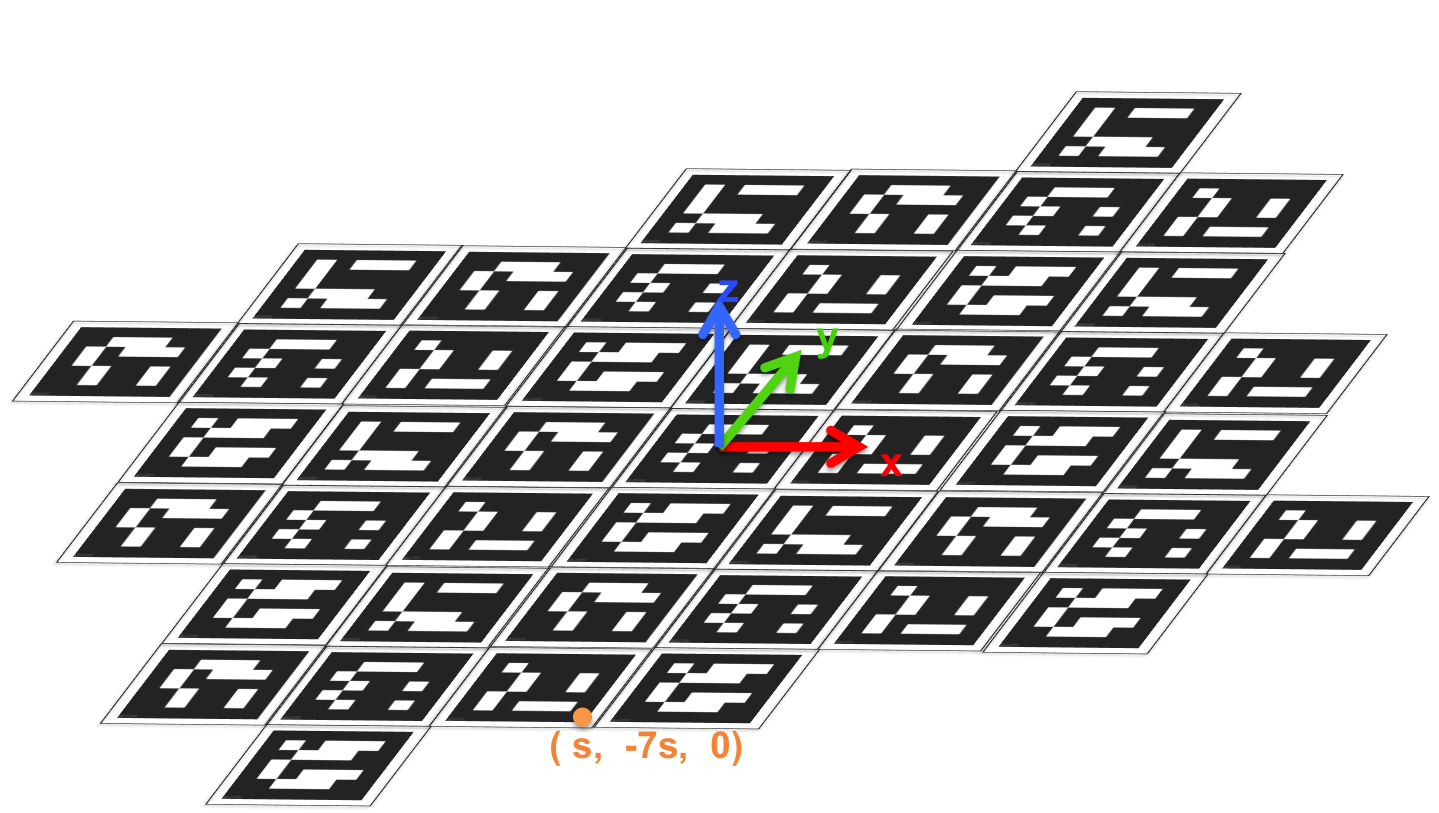
Normal 2D Marker Tracking - Individual Coordinate
17
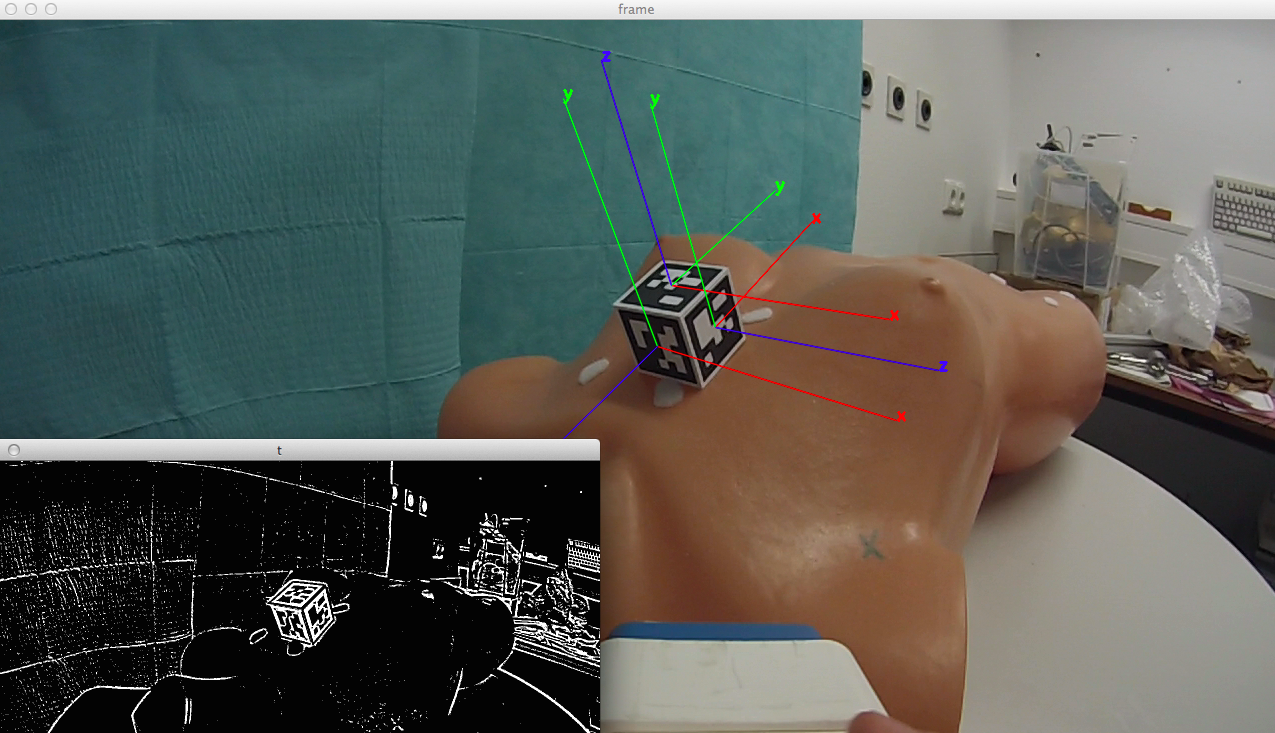
Tracking Model
Applied Multi-Marker Model
18
Tracking Model
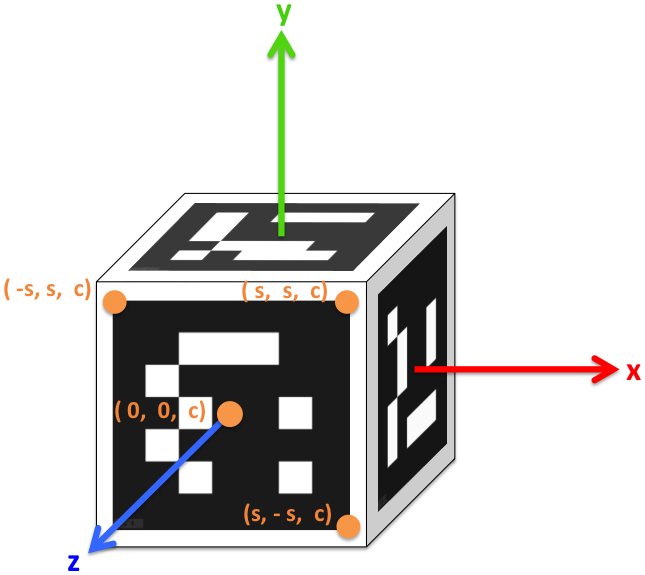
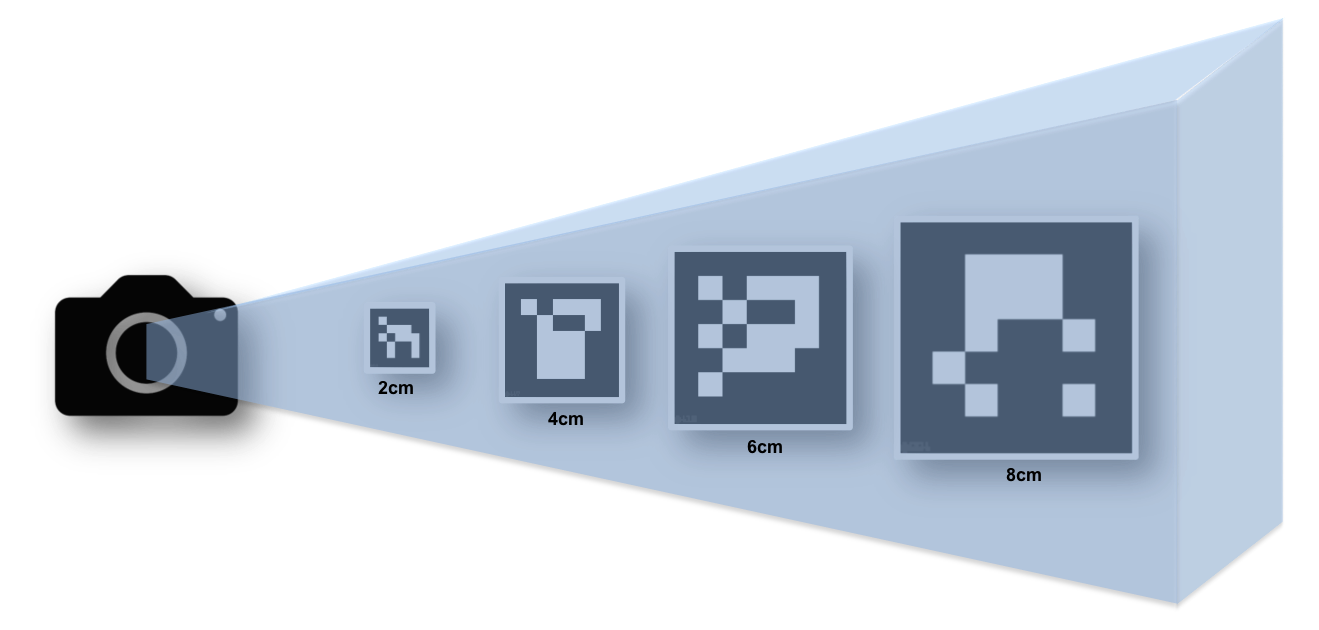
s = 1/2 marker size
c = 1/2 cube size
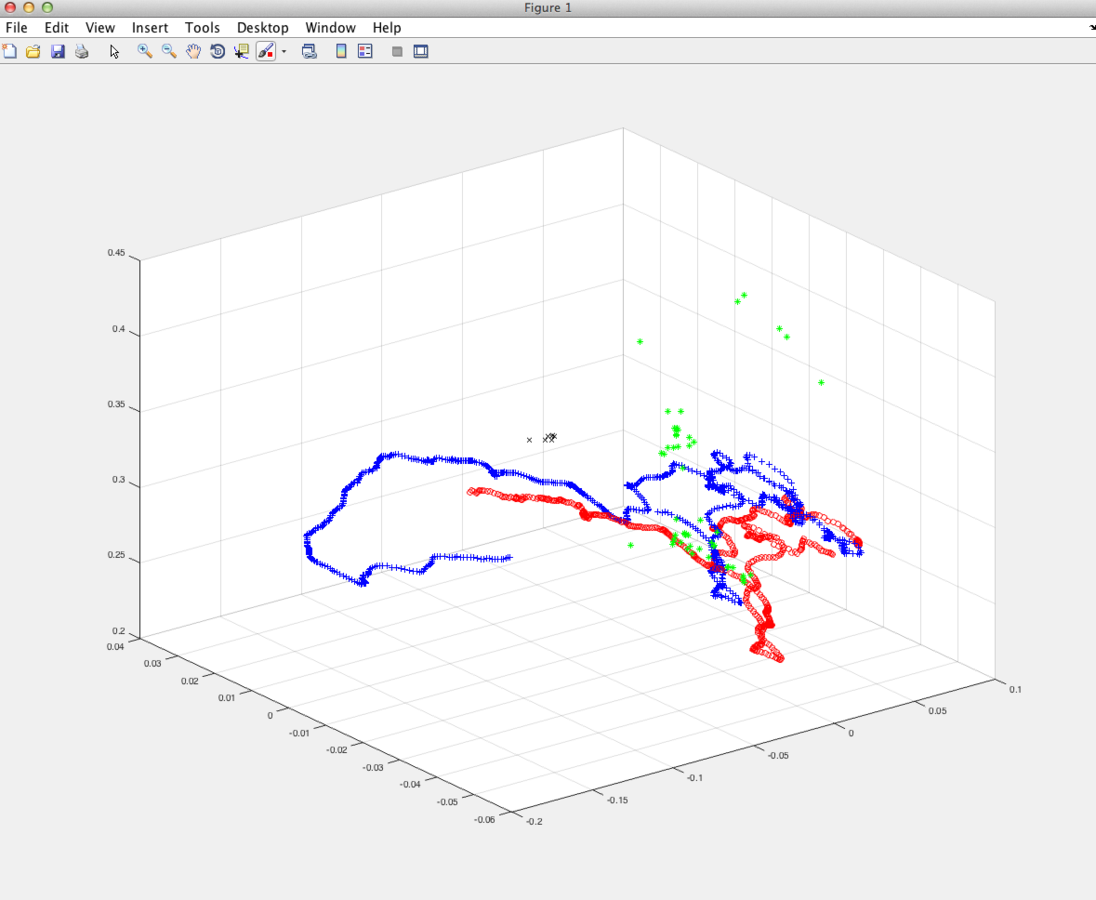
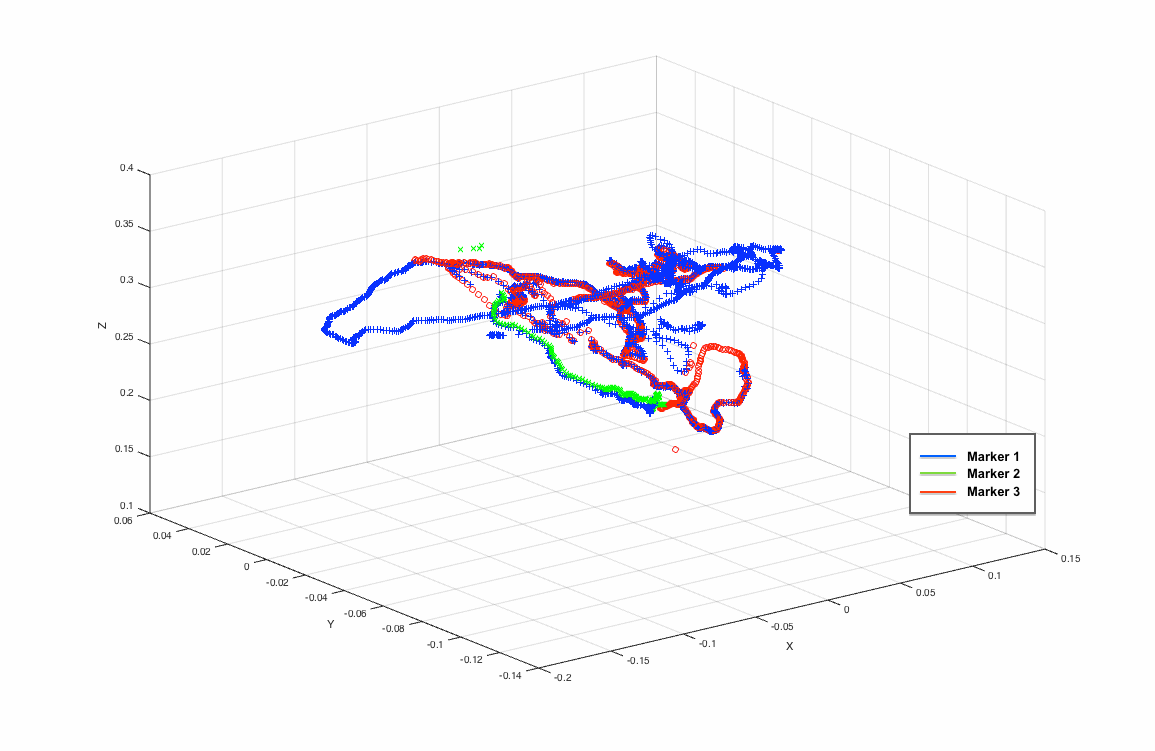
Translation Extracted from Tracking Alg. with 3D Multi-Marker Model
19
3 markers were tracked:
red: #marker 1
green: #maker 2
blue: #marker 3
Tracking Model
20
Marker-Based Tracking
Calibrated Camera
Reference Points
(Intrinsic parameters)
Tcamera (Extrinsic parameters) :
Mean of all detected transformations (single markers)
Tcamera
target
target
ArUco
20
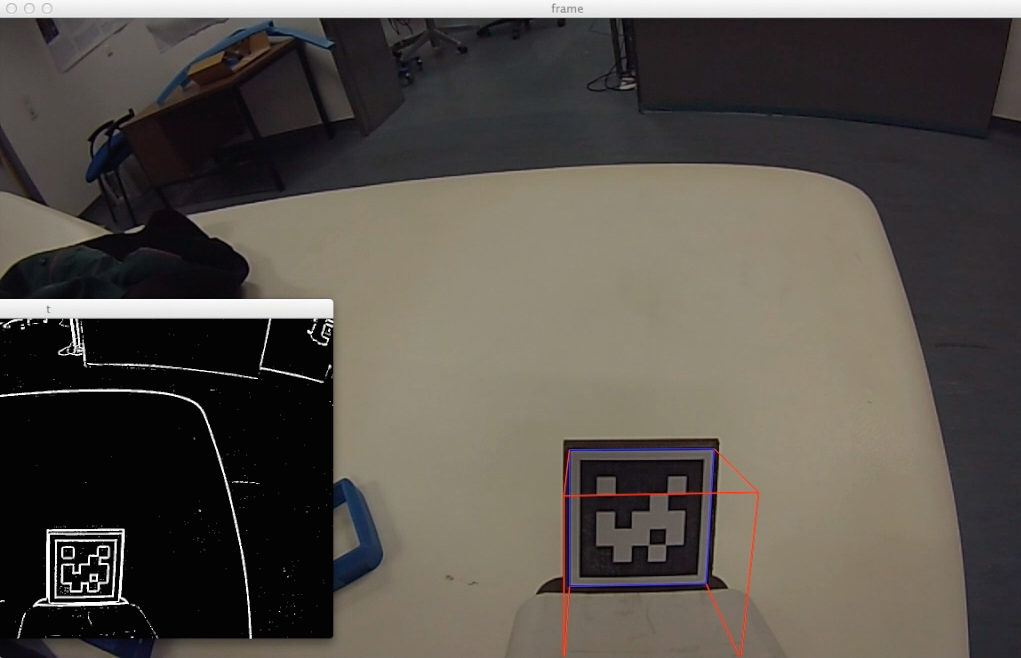
Marker-Based Tracking - ArUco
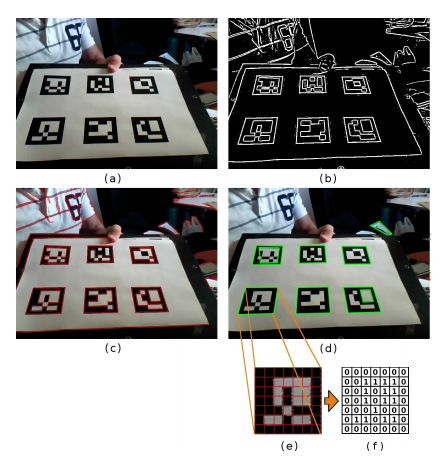
Input Image
Camera Captured
1
20
Marker-Based Tracking - ArUco
Input Image
Camera Captured
1
2
Gray-Scale Image
Image Segmentation
20
Marker-Based Tracking - ArUco
Input Image
Camera Captured
1
2
Gray-Scale Image
Image Segmentation
3
Contour extraction
20
Marker-Based Tracking - ArUco
Input Image
Camera Captured
1
2
3
Contour extraction
Filter Polygon
4
4-vertex Polygon
Gray-Scale Image
Image Segmentation
20
Marker-Based Tracking - ArUco
Input Image
Camera Captured
1
2
3
Contour extraction
Filter Polygon
4
4-vertex Polygon
Gray-Scale Image
Image Segmentation
5
Marker Identification
Perspective Reprojection
Binarized Image :
0: black, 1: white
Road Map
21
Inside-out Tracking & Outside-in Tracking
Reconstruction Tool
AR Visualization
-
State-of-The-Art
-
Tracking System
-
Multi-Tracker-App.
-
Experiment
-
Results & Evaluation
-
Discussion
-
Future Works
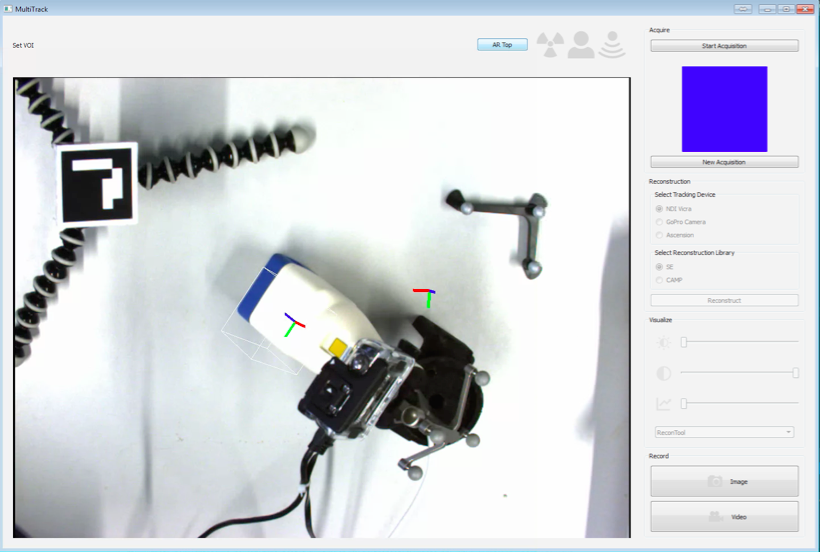
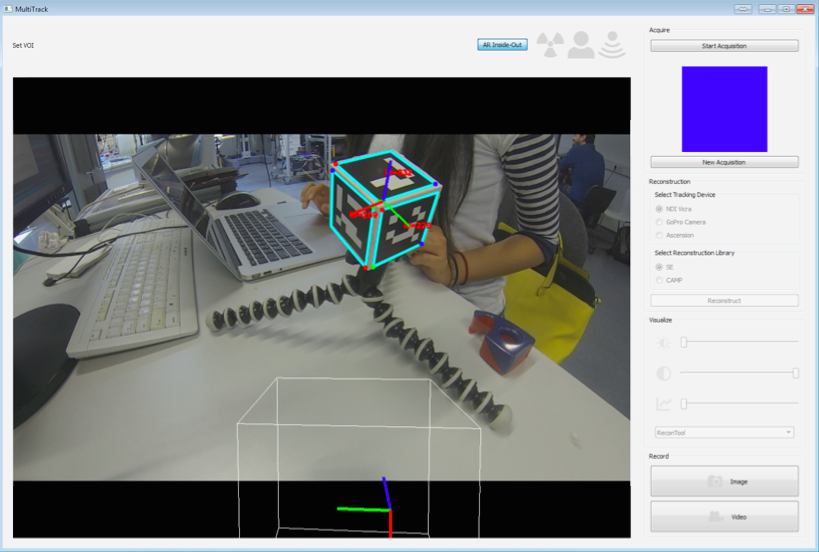
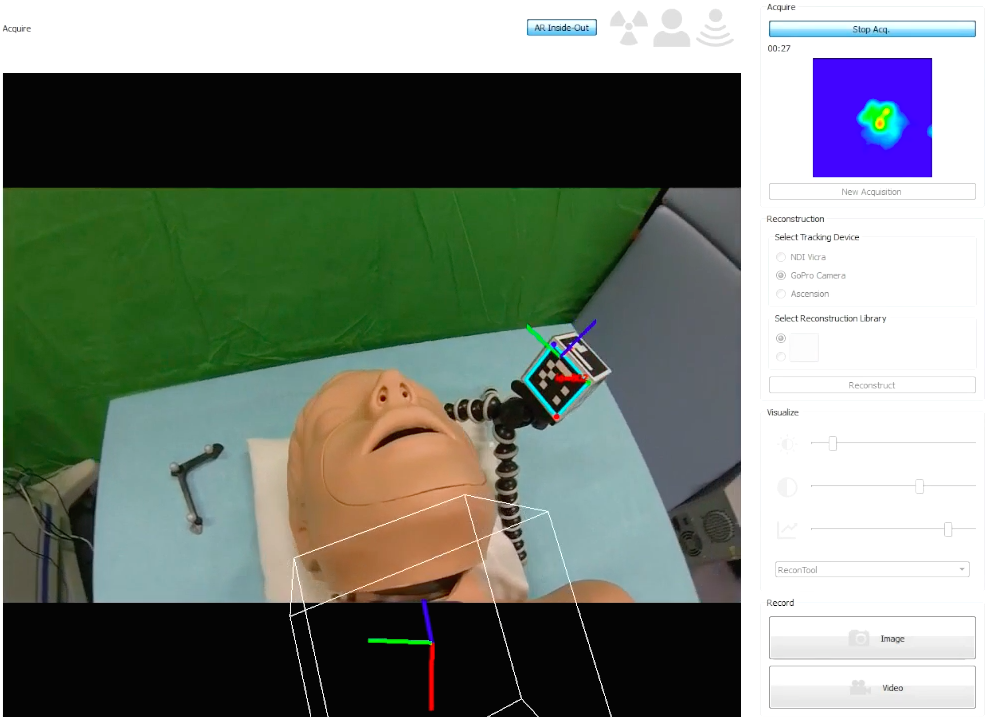
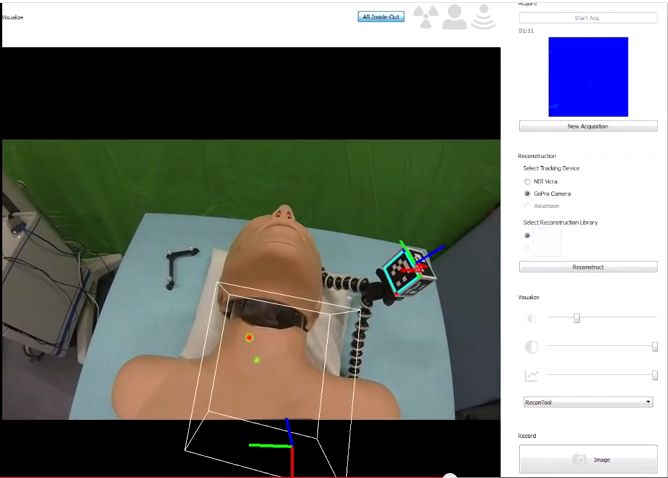
Multi-Tracker-App.
22
Threshold Setting
Reconstruction Tool
GammaProbe Acquisition
Augmented Reality Visualization
1
3
2
Switch View
Multi-Tracker-App.
23
Threshold Setting
Reconstruction Tool
GammaProbe Acquisition
Augmented Reality Visualization
1
3
2
Road Map
24
Lymph node phantom
Thyroid phantom
Breast cancer patient scan
-
State-of-The-Art
-
Tracking System
-
Multi-Tracker-App.
-
Experiment
-
Results & Evaluation
-
Discussion
-
Future Works
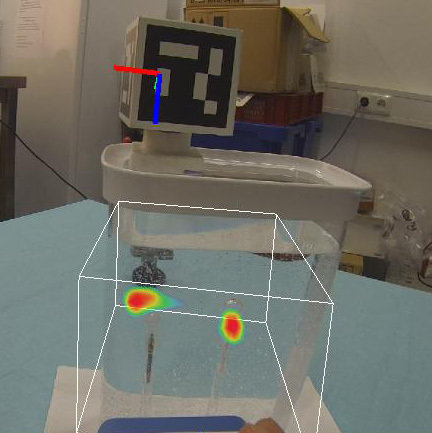
System Setup - Breast lymph node phantom scan
25
Inside-out Tracking

Outside-in Tracking (NDI Tracker)
System Setup - Breast lymph node phantom scan
25
Two hollow spheres in a water-bath:
-
volumes of 3:5ml & 0:6ml each
-
filled with a 3MBq solution of 99mTc
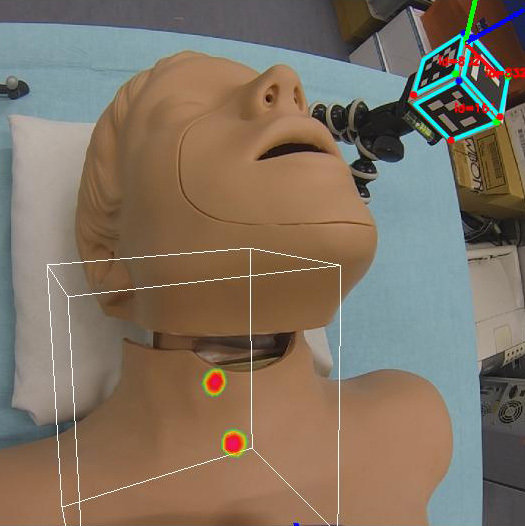
System Setup - Thyroid phantom scan
26
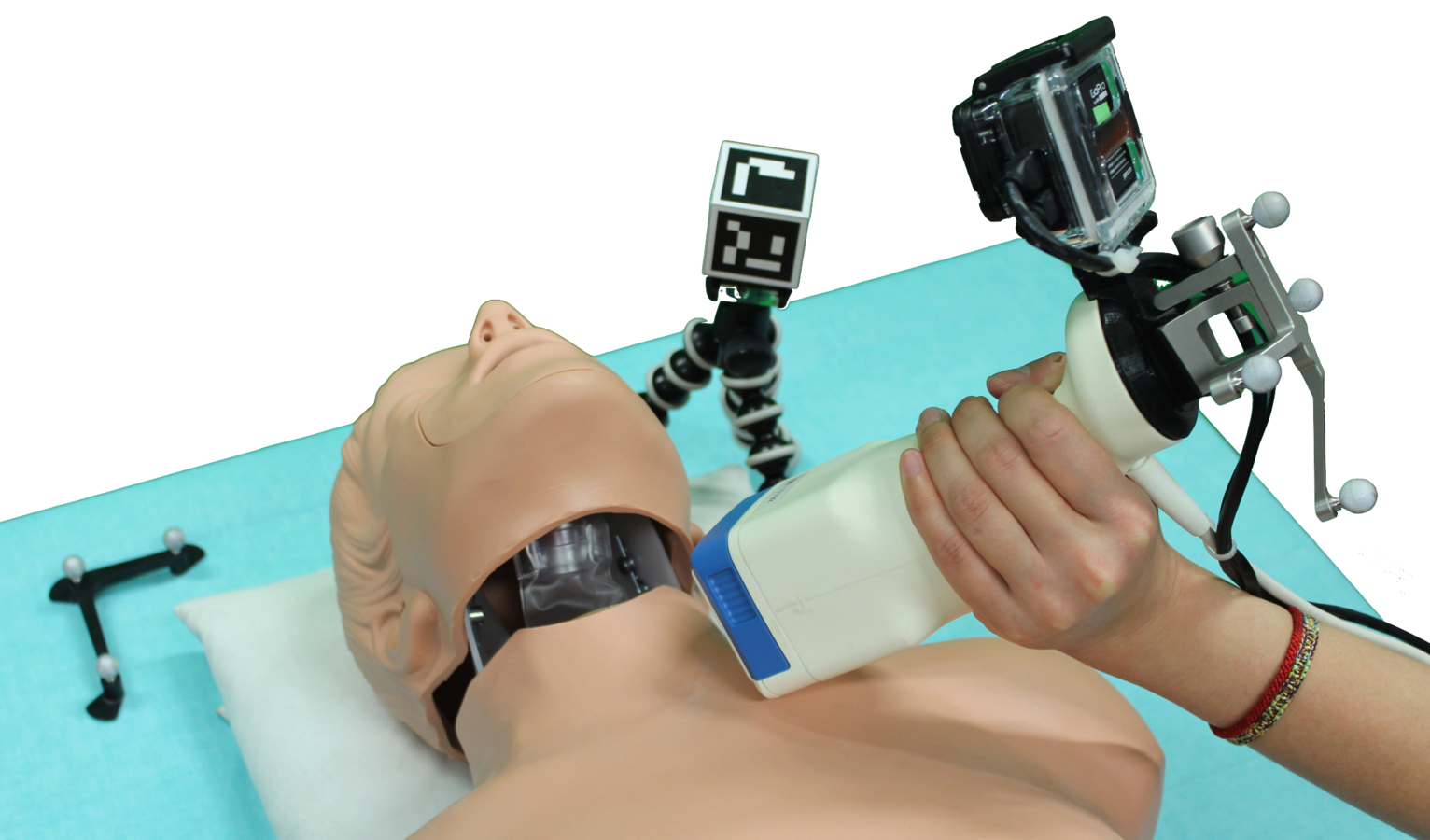
Inside-out Tracking
Outside-in Tracking (NDI Tracker)
System Setup - Thyroid phantom scan
26

-
simulate hot or cold nodules
Custom-printed thyroid phantom :
-
contains 4 chambers of different sizes
filled with radioactivity or water
Inside-out Workflow
27
Multi-Tracker-App.
28
-
System Setup
-
Gamma camera start acquisition
-
Switching view to make sure the tracking validation
Multi-Tracker-App.
28
-
System Setup
-
Gamma camera start acquisition
-
Switching view to make sure the tracking validation
-
Stop acquisition
-
Choose inside-out tracker info. for reconstruction
-
Thresholding the visualization
29
Road Map
-
State-of-The-Art
-
Tracking System
-
Multi-Tracker-App.
-
Experiment
-
Results & Evaluation
-
Discussion
-
Future Works
Inside-out Tracking vs. Outside-in Tracking
Reconstruction & AR
22
Video!!!!!
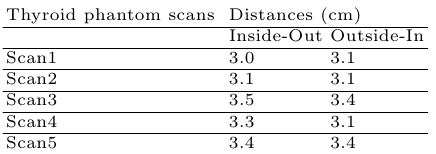
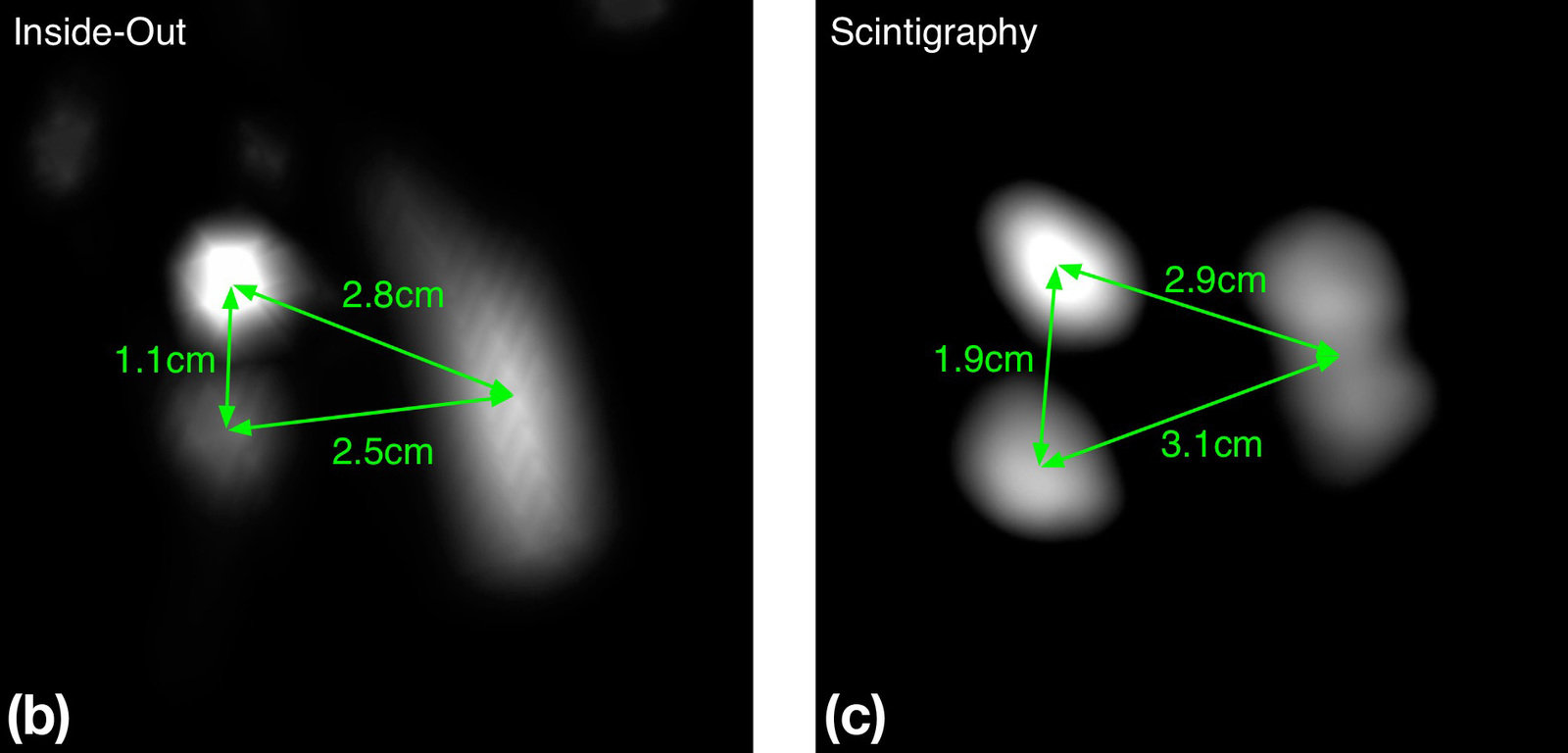
Phantom Experiment Result
30
Real distance: 5.5cm
Real distance: 3.3cm

Real distance: 5.5cm
Real distance: 3.3cm
Phantom Experiment Result
30
Mean 5.45 5.75
Mean 3.22 3.26
Patient Experiment Result
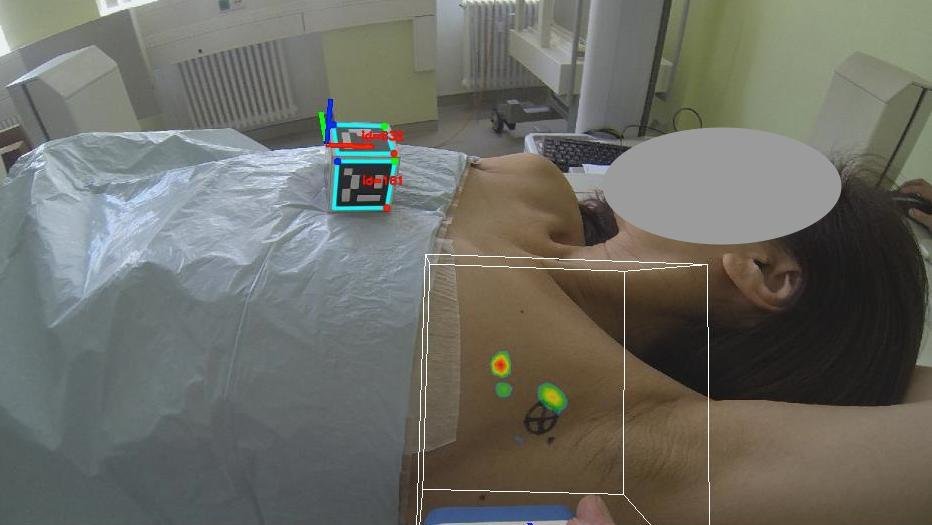
31
32
Tracking Accuracy
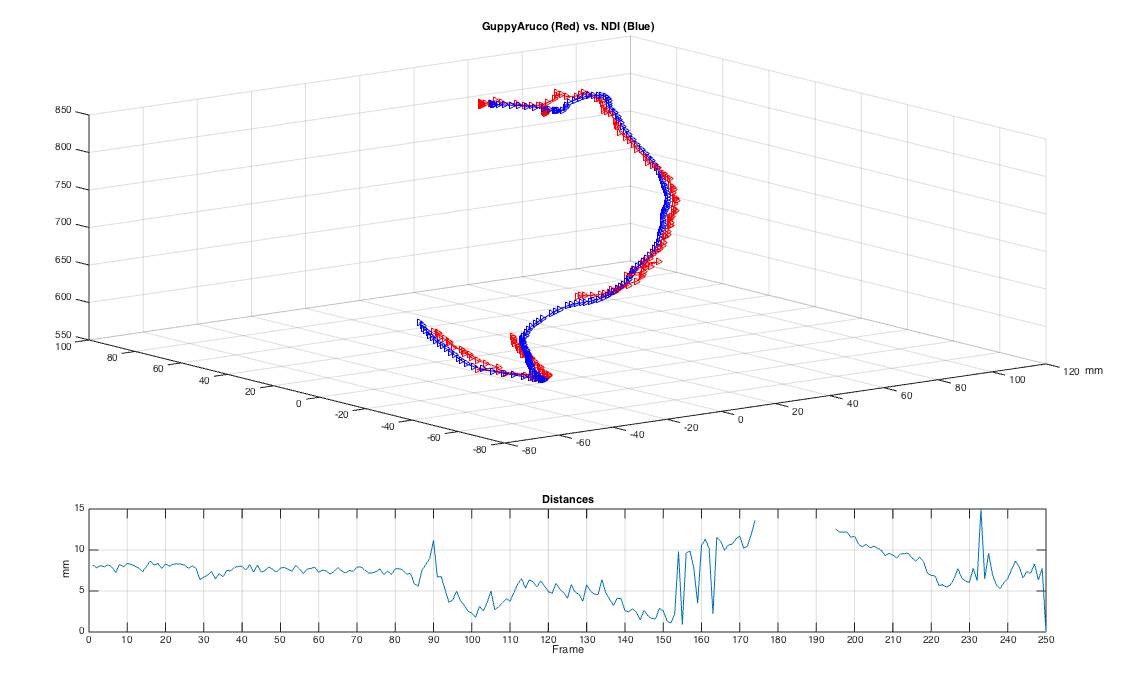
ArUco (Guppy) vs. Outside-in (NDI)
Distance between two sets of tracking points
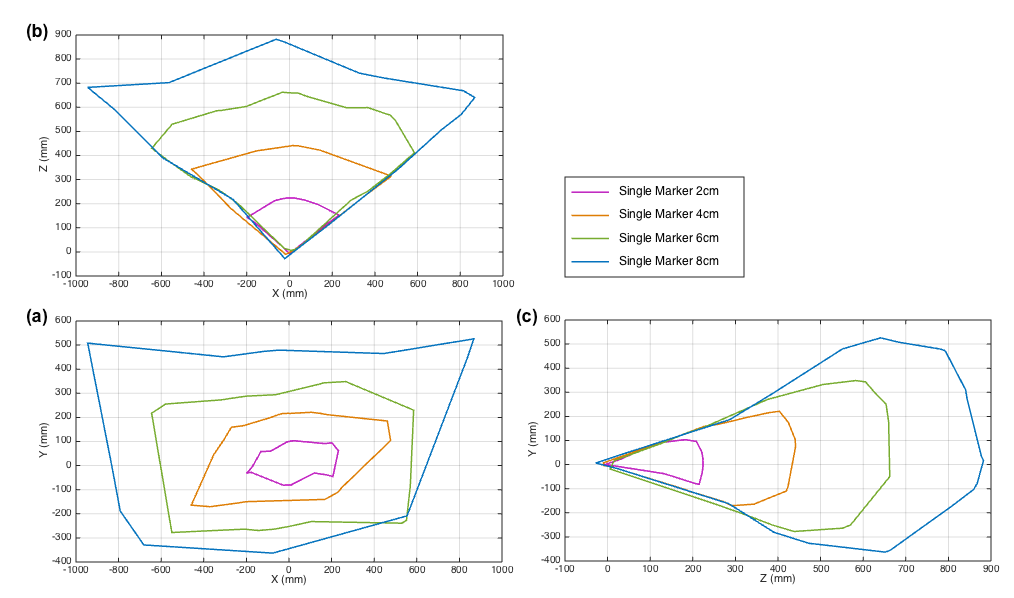
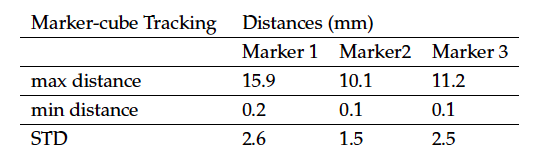
Marker cube limitation
33
Multi-Marker Model Accuracy
34
35
Road Map
-
State-of-The-Art
-
Tracking System
-
Multi-Tracker-App.
-
Experiment
-
Results & Evaluation
-
Discussion
-
Future Works
Inside-out Tracking vs. Outside-in Tracking
Reconstruction & AR
Discussion
Reduced Line-of-sight issue !
Reference target (marker cube) can be easily positioned & tracked!
Simple, Easy, Low cost system setup with comparable accuracy!
Patient & surgeon friendly
36
Discussion
How to deal: operator's handshake that leads to bad tracking?
What are the constrains for the reference target? Is it necessary?
Can the system auto-detect the error if happened during real scan?
Is the system reliably applicable in real clinical practice?
37
38
Road Map
-
Literature research
-
Tracking System
-
Multi-Tracker-App.
-
Experiment
-
Evaluation & Results
-
Future Works
Tracking Accuracy & Stabilization
Mechanical Tracking as ground truth
Next Steps...
Marker-based Tracking:
-
Tracking Algorithm
-
Accuracy assurance & Standard deviation
-
Discard outliers : Error threshold
-
Compare to ground truth. (e.g. Mechanical tracking)
-
39
Next Steps...
Marker-based Tracking:
-
Tracking Algorithm
-
Accuracy assurance & Standard deviation
-
Discard outliers : Error threshold
-
Compare to ground truth. (e.g. Mechanical tracking)
-
-
Reference Marker Design
-
Size & Positioning
-
Cube vs. Plane
-
40
Next Steps...
Reference Marker Design : Cube vs. Plane
41
Next Steps...
Inside-out Tracking System:
-
Hardware setup
-
Dedicated combined optical-/gamma-camera
-
Custom printed the marker cube
-
Dedicated holder for marker cube
-
-
Clinical workflow
-
Address clinical integration issue
-
42
Next Steps...
Inside-out Tracking System:
-
Decomposed Transformation vs. Projection Matrix
-
Motion Tracking without Markers:
-
Project Tango from Google
-
Direct SLAM for RGB-D Cameras
-
43
Thank You for Your Attention!
Thank you Philipp & Thank you Prof. Navab
Thanks for a lot of people who support this project!
Iris Shih
iris.cshih@gmail.com
So much we can do by knowing and applying
the correct Technology!
Iris Shih
iris.cshih@gmail.com
Why I'm here...
Computer Science
Healthcare Problem
Iris Shih
iris.cshih@gmail.com
Why I'm here...
Computer Science
Healthcare Problem
-
Diagnosis Improvement
-
Treatment Improvement
-
Earlier Diseases Detection/Prediction
-
more
"Change Health Behavior through Technology", Health-IS
Iris Shih
iris.cshih@gmail.com
Thank you
Presentation @ ETH
By iriscshih