Tufts Robotic Sail Team
F-dash

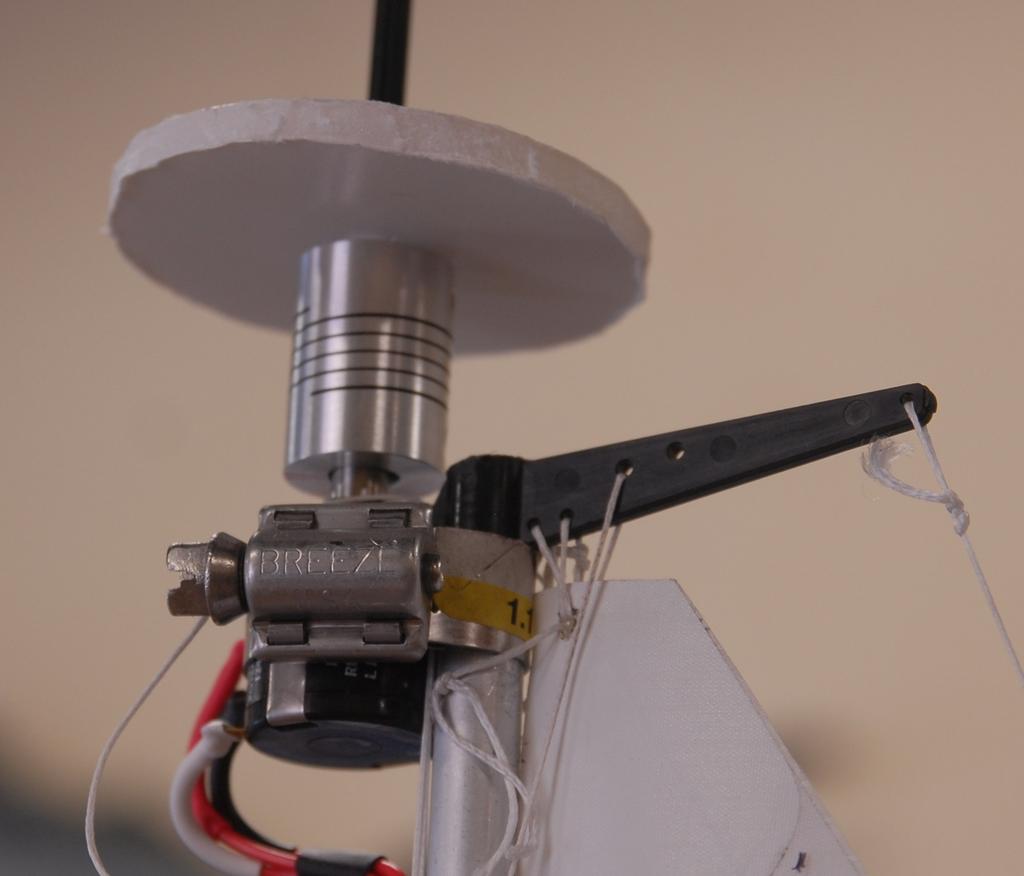
Hacking the CR-914
Assembly
Wind Sensor
Waterproofing

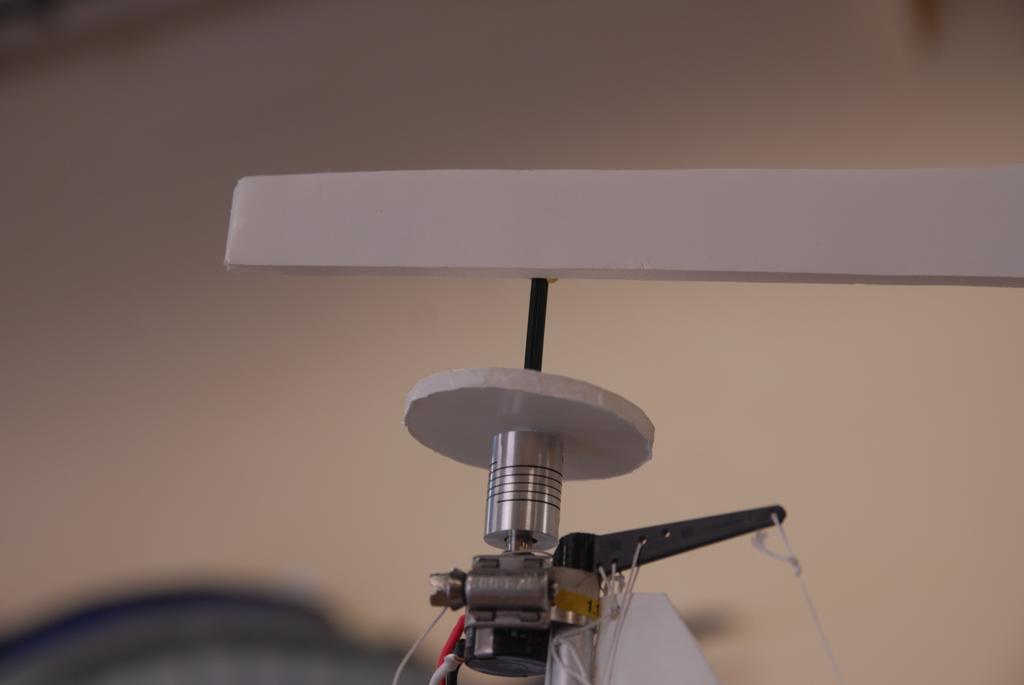

Wind Sensor
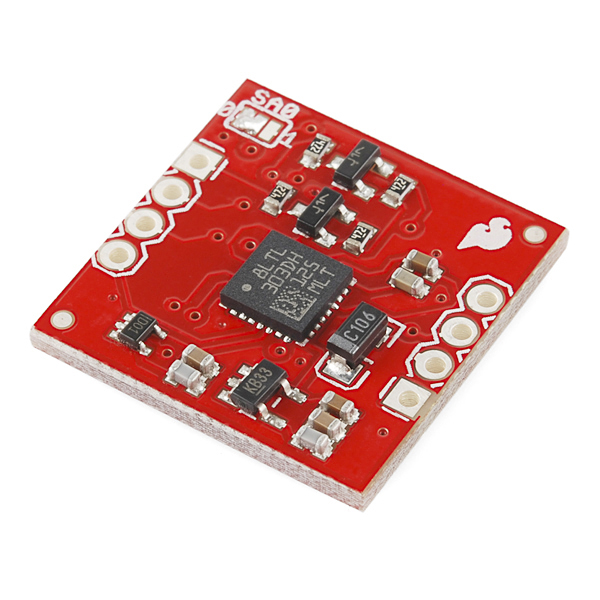
Gyro
Magnetic Compass
Reed Switches
Hall Sensors
Potentiometer
Water-proofing
Internal Tupperware
External waterproof cellphone case + Tupperware

Electronics
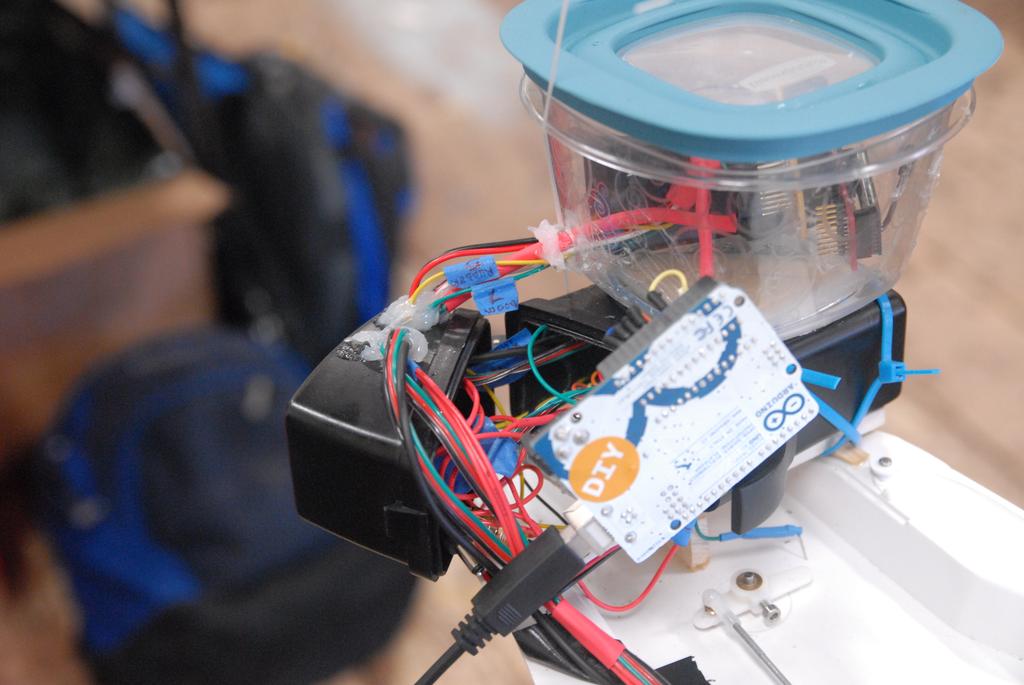
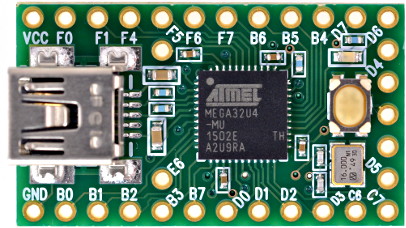
Arduino Uno + Teensy

Sensors
Tilt-compensated Magnetic Compass
GPS
Potentiometer

Wireless Communication
Hobby King RF receiver/transmitter
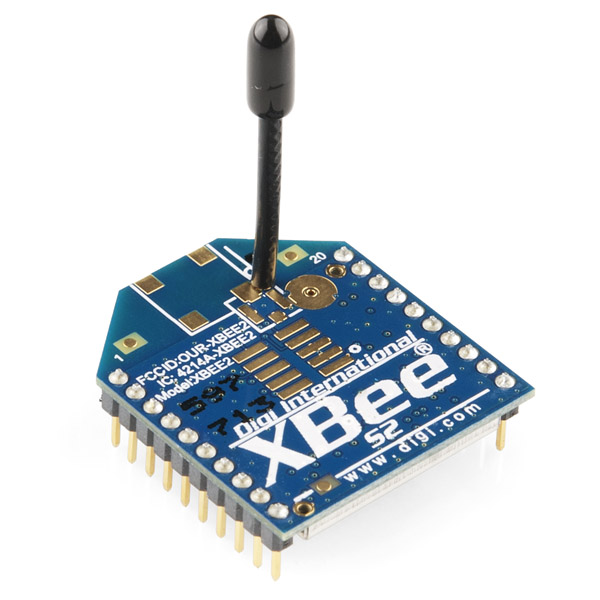
Xbee Module 2

On-board System Schematic

Software
if (currentTack == 1)
{
moveBoatToNewRelativeHeading(50);
}
else if (currentTack == -1)
{
moveBoatToNewRelativeHeading(310);
}
else
{
float angle = angleToTarget(destinationLat, destinationLong);
int angleDifference = (int)angle;
moveBoatToNewRelativeHeading(angleDifference);
}
} Software Choices
State Machine
Trim boom
Trim rudder
Trim Boom

Trim Rudder
Check the no-go-zone
Choose tack
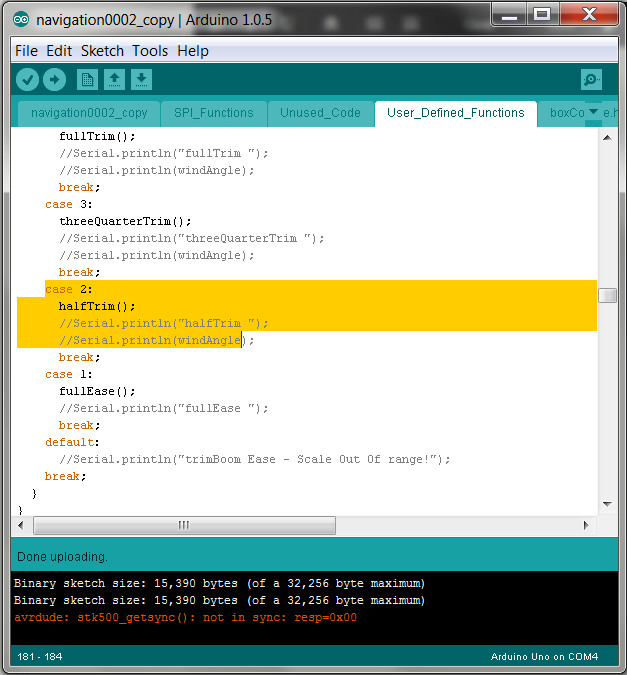
Arduino IDE 1.0.5
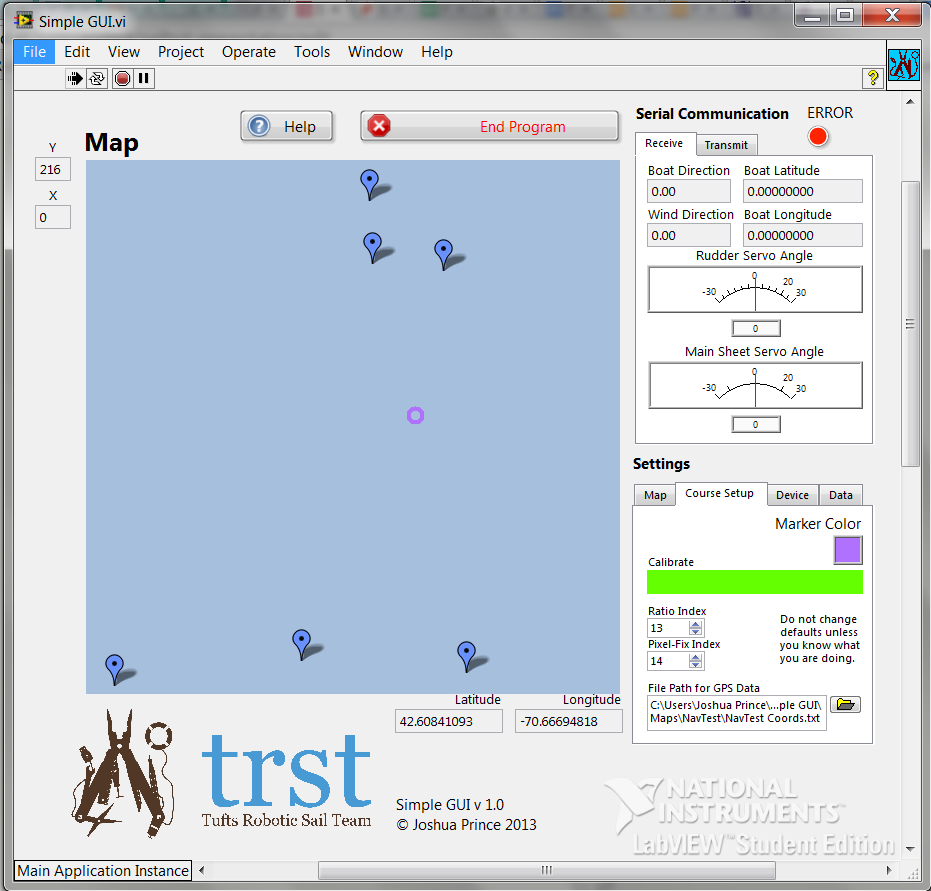
LabView GUI
Next Steps

Sailbot Presentation
By Joshua Prince
