Metodyki
i
techniki programowania
złożoność obliczeniowa i sortowania
- złożoność obliczeniowa algorytmów
- notacja duże O
- typy złożoności
- algorytmy sortowania
- stabilność algorytmów sortowania
- złożoność pesymistyczna
- sortowania bąbelkowe
- sortowanie przez wstawianie
- sortowanie szybkie (quicksort)
Zagadnienia:
POJĘCIE ZŁOŻONOŚCI OBLICZENIOWEJ
określają miarę ilości zasobów komputerowych potrzebnych do wykonania danego algorytmu
- złożoność pesymistyczna - liczba zasobów komputerowych potrzebna przy wprowadzeniu "najgorszych" danych wejściowych,
- złożoność oczekiwana - liczba zasobów komp. potrzebnych przy wprowadzaniu "typowych" danych wejściowych.
PODZIAŁ ZE WZGLĘDU NA RODZAJE ZASOBÓW KOMPUTEROWYCH
- Złożoność czasowa - mówi o tym, ile potrzebujemy instrukcji do rozwiązania problemu. Wyrażana jest liczbą tzw. operacji dominujących, czyli takich, które mają bezpośredni wpływ na czas wykonywania algorytmu, np. dodawanie, odejmowanie, porównanie, zamiana.
- Złożoność pamięciowa - określa, ile pamięci potrzeba do realizacji danej metody.
Złożoność czasowa i pamięciowa zależy od ilości wprowadzanych danych.
KLASY ZŁOŻONOŚCI
są to klasy funkcji algorytmów, które określają zależność czasu w realizacji obliczeń od rozmiaru danych wejściowych (dane pesymistyczne)
PRZYKŁADOWE KLASY ZŁOŻONOŚCI ALGORYTMÓW
a) złożoność stała - O(1), wykonywana jest stała liczba operacji oraz zużywana jest stała liczba komórek pamięci bez względu na rozmiar danych
b) złożoność logarytmiczna - O(logn)
c) złożoność liniowa - O(n), liniowa zależność czasu wykonania od ilości danych
d) złożoność liniowo-logarytmiczna - O(n*logn)
e) złożoność kwadratowa - O(n^2), czas wykonania rośnie z kwadratem liczby przetwarzanych elementów
f) złożoność wykładnicza - O(2^n)
g) złożoność silnii - O(n!)
h) itd., itp. wszelkie, możliwe kombinacje powyższych
PORÓWNANIE KLAS ZŁOŻONOŚCI
Przy złożoności O(2*n), dla przykładowego zbioru danych wejściowych A={1,2,3,5,7,8} (czyli n=6), potrzebujemy 12 operacji, aby algorytm został wykonany.
Nieważne, czy nasza złożoność wynosi 10000*O(n), czy 0.00001*O(n), i tak mówimy o złożoności liniowej.
O(n*logn) - to klasa algorytmów sortowania, które używamy.
Przykładowa inna złożoność to np. n*log(log(log(n))).
Informacje wstępne
Przykład
Załóżmy, że pewien programista ma posortować 1000 plików [n]. Zna tylko algorytm o złożoności O(n^2). Dla ustalenia uwagi jego komputer ma procesor przetwarzający informację z częstotliwością 1GHz (to daje miliard operacji na sekundę [s]). Zatem w naszym przypadku:
O(n^2) n = 1000 = 10^3 s = 10^9
Po podstawieniu danych otrzymamy:
O[(10^3)^2] = 10^6
Dzieląc to przez szybkość komputera otrzymamy czas równy:
T = 10^6/10^9 = 10^-3 s czyli 1 ms.
Stosunkowo dobry czas.
A co jeśli nasz informatyk będzie musiał posortować milion, lub nawet miliard plików, pracując ciągle na tym samym komputerze? Zatem:
a)O(n^2) n = 10^6 s = 10^9
b)O(n^2) n = 10^9 s = 10^9
Po podstawieniu otrzymamy:
a) O[(10^6)^2] = 10^12 T = 10^12/10^9 = 10^3 s (~ 15 min)
b) O[(10^9)^2] = 10^18 T = 10^18/10^9 = 10^9 s (~30 lat)
Przypadek a) jest jeszcze do zaakceptowania, ale z trudem. Przypadek b) będzie trwać zdecydowanie za długo.Co możemy zrobić aby przyspieszyć ten proces?
Nasz informatyk dowiedział się, że można zastosować algorytmy o mniejszej złożoności.
a)O[n*log10(n)]
b)O(n)
Zobaczmy zatem jak będzie wyglądać czas wysyłania oferty dla miliona i miliarda wiadomości:
a) O[10^6*log10(10^6)] = 10^6*6 T=6*10^6/10^9=6*10^-3 (6ms)
O[10^9*log10(10^9)] = 10^9*9 T=9*10^9/10^9=1 (9 s)
b) O(10^6) = 10^6 T=10^6/10^9=10^-3 (1ms)
O(10^9) = 10^9 T=10^9/10^9=1 (1s)
Wybór właściwego algorytmu dla zadania jest kluczowy!
Zastosowanie właściwego algorytmu jest w stanie zredukować czas przetwarzania o całe rzędy wielkości. W naszym przypadku z kilkudziesięciu lat do kilku sekund.
WŁAŚCIWOŚCI NOTACJI "duże O"
W prostych przypadkach arytmetyka na notacji "duże O" (analogicznie dla notacji "małe o") jest intuicyjna, np.:
1. \quad \mathcal{O} (f(x)) + \mathcal{O} (g(x)) = \mathcal{O} ( \max \{ f(x), g(x) \} )
W ogólności zaś należy być bardzo ostrożnym gdyż np. uproszczenie
do nie jest zdefiniowane. Wynika to z nieliniowości logarytmów.
2. \quad \mathcal{O} (f(x)) \cdot \mathcal{O} (g(x)) = \mathcal{O} ( f(x) g(x))
3. \quad k \cdot \mathcal{O} ( f(x)) = \mathcal{O} ( f(x)) , \quad k = \text{const}
\exp \left( \ln \mathcal{O} (f(x)) \right)
\mathcal{O} (f(x))
PRZYKŁADY - notacja "duże O"
1.\quad f(x) = 2x^3-x^2+100x,
a)\quad f(x) \in \mathcal{O}(x^3)
b)\quad f(x) \in 2x^3+\mathcal{O}(x^2)
c) \quad f(x) \in 2x^3-x^2+\mathcal{O}(x)
2.\quad f(x)=1000x^{50}+2x^2, \quad g(x)=0,0000001x^{50}+665x :
f(x) \in \mathcal{O}(x^{50}), \quad g(x) \in \mathcal{O}(x^{50})
g(x) \in \mathcal{O}(f(x))
3.\quad S(n) = 1 + 2 + \cdots + n
zapis w zależności od wymaganej
dokładności oszacowań:
<=>
b) \quad S(n)= \frac{n^2}{2} + \frac{n}{2} \in \frac{n^2}{2}+\mathcal{O}(n)
a) \quad S(n)=\frac{n(n+1)}{2} < 3 \cdot n^2, \quad \text{zatem} \quad S(n) \in \mathcal{O}(n^2)\,
STANDARDOWE SZACOWANIE
* \quad f(x) \in \mathcal{O}(1)
* \quad f(x) \in \mathcal{O}(\log n)
* \quad f(x) \in \mathcal{O}(n)
*\quad f(x) \in \mathcal{O}(n \log n)
*\quad f(x) \in \mathcal{O}(n^k)
* \quad f(x) \in \mathcal{O}(a^n)
* \quad f(x) \in \mathcal{O}(n!)
– funkcja jest ograniczona, np.:
– funkcja jest ograniczona przez funkcję
logarytmiczną
– funkcja jest ograniczona przez funkcję
liniową
– funkcja jest ograniczona przez funkcję potęgową lub wielomian
– funkcja jest ograniczona przez funkcję
wykładniczą
– funkcja jest ograniczona przez silnię
f(x)
f(x)
f(x)
f(x)
f(x)
f(x)
\sin x = \mathcal{O} (1)
- sortujące w miejscu - w procesie sortowania tylko stała liczba elementów tablicy wejściowej jest przechowywana poza nią, czyli do działania tego typu algorytmów nie jest potrzebna większa niż stała pamięć dodatkowa
- niesortujące w miejscu - wymagają dodatkowej pamięci
- stabilne - zachowują kolejność elementów równych. Czasami ma to znaczenie, gdy sortujemy rekordy bazy danych i nie chcemy, aby rekordy o tym samym kluczu zmieniały względem siebie położenie. Do tego typu algorytmów zaliczamy m. in. :
- sortowanie bąbelkowe, O(n^2)
- sortowanie przez wstawianie, O(n^2)
- sortowanie przez zliczanie, O(n+k)
ALGORYTMY SORTOWANIA
- niestabilne
- sortowanie szybkie, O(n*logn)
SORTOWANIE BĄBELKOWE
ang. bubble sort
Za pomocą tego algorytmu sprawdzamy całą tablicę od końca. Jeżeli trafimy na parę elementów, w której większy poprzedza mniejszy, to zamieniamy je miejscami i znów zaczynamy przeszukiwać tę tablicę od końca.
Czynność jest powtarzana do czasu, gdy podczas sprawdzania całej tablicy nie zajdzie ani jedna zamiana elementów.
Algorytm nosi nazwę bąbelkowy, gdyż najmniejsze liczby "wypływają" z dołu tablicy na jej szczyt.

SORTOWANIE BĄBELKOWE
ang. bubble sort
Klasa złożoności O(n^2).
Sprawdzane są elementy już posortowane, dlatego też sporą wadą tego algorytmu są tzw. puste przebiegi.
Możemy go poprawić zapamiętując za każdym razem indeks tablicy, od którego liczby są już uporządkowane. Oczywiście przyspieszy to konkretną implementację algorytmu, ale w ogólności i tak nie zmieni to klasy algorytmu O(n^2-n) = O(n^2).
PRZYKŁADOWY ZAPIS ALGORYTMU SORTOWANIA BĄBELKOWEGO
#include <iostream>
#include <vector>
using namespace std;
void bubble_sort(vector<int> & v);
int main(){
vector<int> v = {342,5356,234,567,72,4326,423,536,324};
bubble_sort(v);
for (auto elem : v) {
cout << elem << " ";
}
return 0;
}PRZYKŁADOWY ZAPIS ALGORYTMU SORTOWANIA BĄBELKOWEGO
void bubble_sort(vector<int> & v){
bool byla_zamiana;
while(byla_zamiana){
byla_zamiana = false;
for(int i = 1; i<v.size(); i++){
if(v[i] < v[i - 1]){
int zmienna_pomocnicza = v[i];
v[i] = v[i-1];
v[i-1] = zmienna_pomocnicza;
byla_zamiana = true;
}
}
}
}
Obrazek z Wikipedia Creative Commons Attribution-ShareAlike License
SORTOWANIE PRZEZ WSTAWIANIE
ang. insertion sort
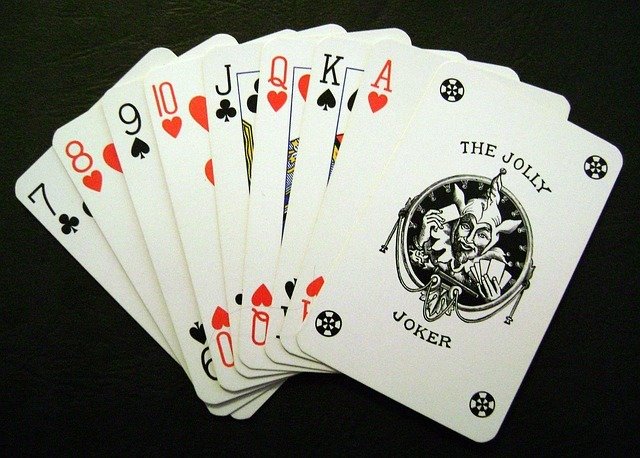
Idea działania tego algorytmu opiera się na podziale ciągu na dwie części: pierwsza jest posortowana, druga jeszcze nie. Wybieramy kolejną liczbę z drugiej części i wstawiamy ją do pierwszej. Ponieważ jest ona posortowana to szukamy dla naszej liczby takiego miejsca, aby liczba na lewo była niewiększa, a liczba na prawo niemniejsza.
Zasada działania tego algorytmu jest często porównywana do porządkowania kart w wachlarz podczas gry.
SORTOWANIE PRZEZ WSTAWIANIE
ang. insertion sort
Złożoność tego algorytmu również jest kwadratowa O(n^2) -> wstawanie liczby do posortowanej tablicy wymaga czasu O(n), lecz w przypadku częściowo posortowanego ciągu możemy otrzymać złożoność liniową O(n) algorytmu.
Algorytm ten jest o wiele lepszy niż sortowanie bąbelkowe, ale w dalszym ciągu charakteryzuje się dość wysokim kosztem, co eliminuje go w praktyce z sortowania dużych tablic.
PRZYKŁADOWY ZAPIS ALGORYTMU SORTOWANIA PRZEZ WSTAWIANIE
void insertion_sort(std::vector<int> & v) {
for (int i = 1;i<v.size();i++) {
int wstawiany = v[i]; // aktualny element zapisujemy obok
int j = i; // wszystkie na lewo od i są już posortowane
for (;j> 0 && wstawiany < v[j - 1] ; j--) {
v[j] = v[j - 1]; // przesuwamy - w ten sposób robimy miejsce dla
// aktualnie sortowanego elementu
}
v[j] = wstawiany;
}
}
Obrazek z Wikipedia Creative Commons Attribution-ShareAlike License
SORTOWANIE SZYBKIE
ang. quicksort
Zostało wynalezione w 1962 roku przez Charles'a Anthony'ego Richard'a Hoare'a. Działa w oparciu o zasadę "dziel i zwyciężaj" (ang. divide and conquer).

Tony Hoare (ur. 11.01.1934 w Kolombo, Sri Lanka) - brytyjski informatyk, który w roku 1980 otrzymał nagrodę Turinga (odpowiednik Nobla w Informatyce), jako dowód uznania za wkład w rozwój języków programowania.
1. DZIEL -> dzielimy nasz zbiór danych na dwa podzbiory, które są niezależnie sortowane. Najważniejszy jest wybór piwotu, czyli miejsca podziału tablicy. Jest to tzw. element rozgraniczający, którym może być dowolny wyraz.
2. ZWYCIĘŻAJ ->
i. Przeglądamy tablicę od lewego końca, aż znajdziemy element większy niż rozgraniczający.
ii. Przeglądamy tablicę od prawego końca aż znajdziemy element mniejszy od rozgraniczającego.
iii. Zamieniamy te elementy miejscami i teraz powtarzamy algorytm sortowania osobno dla dwóch partycji dochodząc do tablic jednoelementowych.
wartości <=piwot wartości >=piwot PIWOT
lewa partycja prawa partycja
3. POŁĄCZ -> połączenie otrzymanych częściowych rozwiązań w rozwiązanie globalne.
"DZIEL I ZWYCIĘŻAJ!"
- Algorytm ten uważany jest za najszybszy dla danych losowych.
- Jest to algorytm niestabilny, dlatego też cechy elementów, które w trakcie sortowania nie były brane pod uwagę mogą zmienić swoją kolejność po sortowaniu.
- Algorytm ten w najgorszym przypadku ma złożoność kwadratową O(n^2), ale mimo to jest bardzo często stosowany ze względu na swoją niską liniowo-logarytmiczną złożoność (O(n*ln(n) ) w średnim przypadku.
SORTOWANIE SZYBKIE cd.
ang. quicksort
GRAFICZNE PRZEDSTAWIENIE ALGORYTMU
SORTOWANIA
SZYBKIEGO
GRAFICZNE PRZEDSTAWIENIE ALGORYTMU SORTOWANIA SZYBKIEGO nr 2
GRAFICZNE PRZEDSTAWIENIE ALGORYTMU SORTOWANIA SZYBKIEGO nr 2 cd.
#include <iostream>
#include <vector>
using namespace std;
void quicksort(vector<int> & v);
int main(){
vector<int> v = {342,5356,234,567,72,4326,423,536,324};
quicksort(v);
for (auto elem : v) {
cout << elem << " ";
}
return 0;
}#include <iostream>
#include <vector>
using namespace std;
void quicksort(vector<int> & v);
void quicksort(vector<int> & v,int left,int right);
int main(){
vector<int> v = {342,5356,234,567,72,4326,423,536,324};
quicksort(v);
for (auto elem : v) {
cout << elem << " ";
}
return 0;
}
void quicksort(vector<int> & v) {
quicksort(v, 0, v.size() - 1);
}
#include <iostream>
#include <vector>
using namespace std;
void quicksort(vector<int> & v);
void quicksort(vector<int> & v,int left,int right);
int partition(vector<int> & v, int left, int right);
int main(){
vector<int> v = {342,5356,234,567,72,4326,423,536,324};
quicksort(v);
for (auto elem : v) {
cout << elem << " ";
}
return 0;
}
void quicksort(vector<int> & v) {
quicksort(v, 0, v.size() - 1);
}
void quicksort(vector<int> & v, int left, int right) {
// dzielimy wektor na dwie części, pivot to indeks podziału
int pivot = partition(v, left, right);
quicksort(v, left, pivot);
quicksort(v, pivot + 1, right);
}
#include <iostream>
#include <vector>
using namespace std;
void quicksort(vector<int> & v);
void quicksort(vector<int> & v,int left,int right);
int partition(vector<int> & v, int left, int right);
int main(){
vector<int> v = {342,5356,234,567,72,4326,423,536,324};
quicksort(v);
for (auto elem : v) {
cout << elem << " ";
}
return 0;
}
void quicksort(vector<int> & v) {
quicksort(v, 0, v.size() - 1);
}
void quicksort(vector<int> & v, int left, int right) {
if (left < right) { // warunek stopu algorytmu, już nie ma co dzielić
// dzielimy wektor na dwie części, pivot to indeks podziału
int pivot = partition(v, left, right);
quicksort(v, left, pivot);
quicksort(v, pivot + 1, right);
}
}
// dzielimy wektor na dwie części, w pierwszej wszystkie liczby są <= x, w drugiej >x
int partition(vector<int> & v, int left, int right){
//...
}// dzielimy wektor na dwie części, w pierwszej wszystkie liczby są <= x, w drugiej >x
int partition(vector<int> & v, int left, int right) {
// obieramy piwot (element podziału) jako pierwszy element wektora
// może być dowolny inny, ale jakiś musimy przyjąć
int pivot = v[left];
// przesuń elementy mniejsze od pivota na lewo, większe na prawo
}// dzielimy wektor na dwie części, w pierwszej wszystkie liczby są <= x, w drugiej >x
int partition(vector<int> & v, int left, int right) {
// obieramy piwot (element podziału) jako pierwszy element wektora
// może być dowolny inny, ale jakiś musimy przyjąć
int pivot = v[left];
int i = left, j = right; // i, j = indeksy w wektorze do zamieniania
// przesuń elementy mniejsze od pivota na lewo, większe na prawo
// ...
}// dzielimy wektor na dwie części, w pierwszej wszystkie liczby są <= x, w drugiej >x
int partition(vector<int> & v, int left, int right) {
// obieramy piwot (element podziału) jako pierwszy element wektora
// może być dowolny inny, ale jakiś musimy przyjąć
int pivot = v[left];
int i = left, j = right; // i, j = indeksy w wektorze do zamieniania
while (true) { // pętla nieskończona - wychodzimy z niej tylko przez return j
// dopóki elementy z prawego końca wektora są większe od pivota jest ok
while (v[j] > pivot) {j--;}
// dopóki elementy z lewego końca wektora są mniejsze od pivota jest ok
while (v[i] < pivot) {i++;}
// ...
}
}// dzielimy wektor na dwie części, w pierwszej wszystkie liczby są <= x, w drugiej >x
int partition(vector<int> & v, int left, int right) {
// obieramy piwot (element podziału) jako pierwszy element wektora
// może być dowolny inny, ale jakiś musimy przyjąć
int pivot = v[left];
int i = left, j = right; // i, j = indeksy w wektorze do zamieniania
while (true) { // pętla nieskończona - wychodzimy z niej tylko przez return j
// dopóki elementy z prawego końca wektora są większe od pivota jest ok
while (v[j] > pivot) {j--;}
// dopóki elementy z lewego końca wektora są mniejsze od pivota jest ok
while (v[i] < pivot) {i++;}
// elementy za indeksami i oraz j są po złej stronie, zamieniamy je miejscami
if (i<j) {
// zamień miejscami
// ...
}
}
}// dzielimy wektor na dwie części, w pierwszej wszystkie liczby są <= x, w drugiej >x
int partition(vector<int> & v, int left, int right) {
// obieramy piwot (element podziału) jako pierwszy element wektora
// może być dowolny inny, ale jakiś musimy przyjąć
int pivot = v[left];
int i = left, j = right; // i, j = indeksy w wektorze do zamieniania
while (true) { // pętla nieskończona - wychodzimy z niej tylko przez return j
// dopóki elementy z prawego końca wektora są większe od pivota jest ok
while (v[j] > pivot) {j--;}
// dopóki elementy z lewego końca wektora są mniejsze od pivota jest ok
while (v[i] < pivot) {i++;}
// elementy za indeksami i oraz j są po złej stronie, zamieniamy je miejscami
if (i<j) {
int w = v[i];
v[i] = v[j];
v[j] = w;
// ....
}
}
}// dzielimy wektor na dwie części, w pierwszej wszystkie liczby są <= x, w drugiej >x
int partition(vector<int> & v, int left, int right) {
// obieramy piwot (element podziału) jako pierwszy element wektora
// może być dowolny inny, ale jakiś musimy przyjąć
int pivot = v[left];
int i = left, j = right; // i, j = indeksy w wektorze do zamieniania
while (true) { // pętla nieskończona - wychodzimy z niej tylko przez return j
// dopóki elementy z prawego końca wektora są większe od pivota jest ok
while (v[j] > pivot) {j--;}
// dopóki elementy z lewego końca wektora są mniejsze od pivota jest ok
while (v[i] < pivot) {i++;}
// elementy za indeksami i oraz j są po złej stronie, zamieniamy je miejscami
if (i<j) {
int w = v[i];
v[i] = v[j];
v[j] = w;
i++; // idź dalej
j--;
}
// ...
}
}// dzielimy wektor na dwie części, w pierwszej wszystkie liczby są <= x, w drugiej >x
int partition(vector<int> & v, int left, int right) {
// obieramy piwot (element podziału) jako pierwszy element wektora
// może być dowolny inny, ale jakiś musimy przyjąć
int pivot = v[left];
int i = left, j = right; // i, j = indeksy w wektorze do zamieniania
while (true) { // pętla nieskończona - wychodzimy z niej tylko przez return j
// dopóki elementy z prawego końca wektora są większe od pivota jest ok
while (v[j] > pivot) {j--;}
// dopóki elementy z lewego końca wektora są mniejsze od pivota jest ok
while (v[i] < pivot) {i++;}
// elementy za indeksami i oraz j są po złej stronie, zamieniamy je miejscami
if (i<j) {
int w = v[i];
v[i] = v[j];
v[j] = w;
i++; // idź dalej
j--;
}
else { // wszystkie elementy większe po prawej, mniejsze po lewej
// kończymy, zwracamy miejsce podziału
return j;
}
}
}Sortowania
By pedzimaz
Sortowania
bąbelkowe, przez wstawianie, szybkie