













Alexander W. Winkler
Robotics researcher specialized in motion planning for legged systems.
Alexander W. Winkler Farbod Farshidian Michael Neunert Diego Pardo Jonas Buchli
IEEE Internation Conference on Robotics and Automation , 2017
www.awinkler.me
A. Herdt et al, “Online Walking Motion Generation with Automatic Foot Step Placement,” HAL archives-ouvertes, 2010
www.awinkler.me
www.awinkler.me
M. Kalakrishnan et al, “Learning, planning, and control for quadruped locomotion over challenging terrain,” IJRR, 2010
www.awinkler.me
M. Kalakrishnan et al, “Learning, planning, and control for quadruped locomotion over challenging terrain,” IJRR, 2010
www.awinkler.me
www.awinkler.me
www.awinkler.me
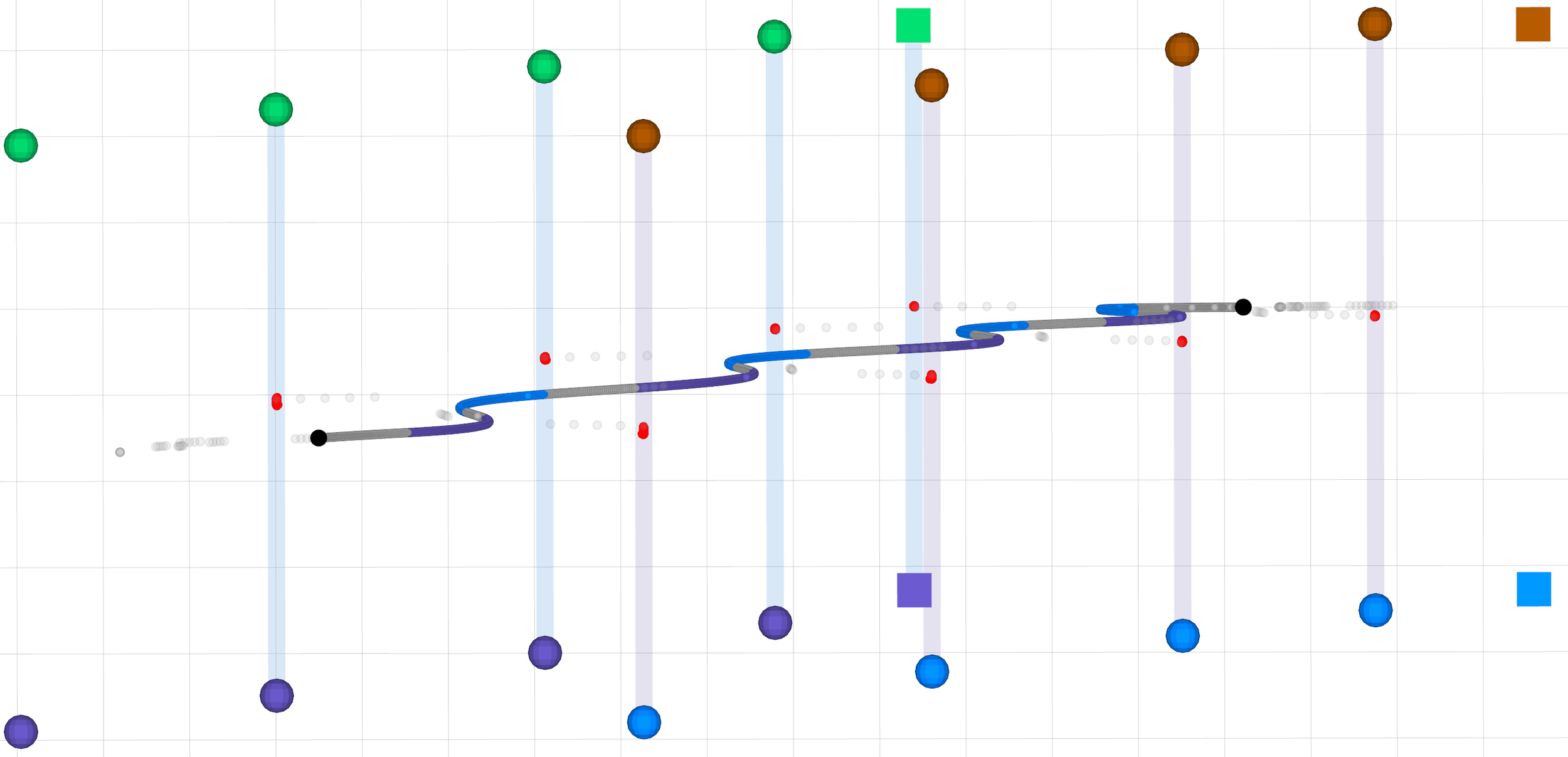
1. Modify CoM motion \(\color{red}{\mathbf{a}}\) so that it can be generated by a CoP inside the current base of support.
2. Modify base of support by changing the footholds \(\color{red}{\mathbf{p}}\) to accommodate the CoM acceleration
www.awinkler.me
S. Kajita et al, “Biped walking pattern generation by using preview control of zero-moment point,” IEEE International Conference on Robotics and Automation, 2003.
www.awinkler.me
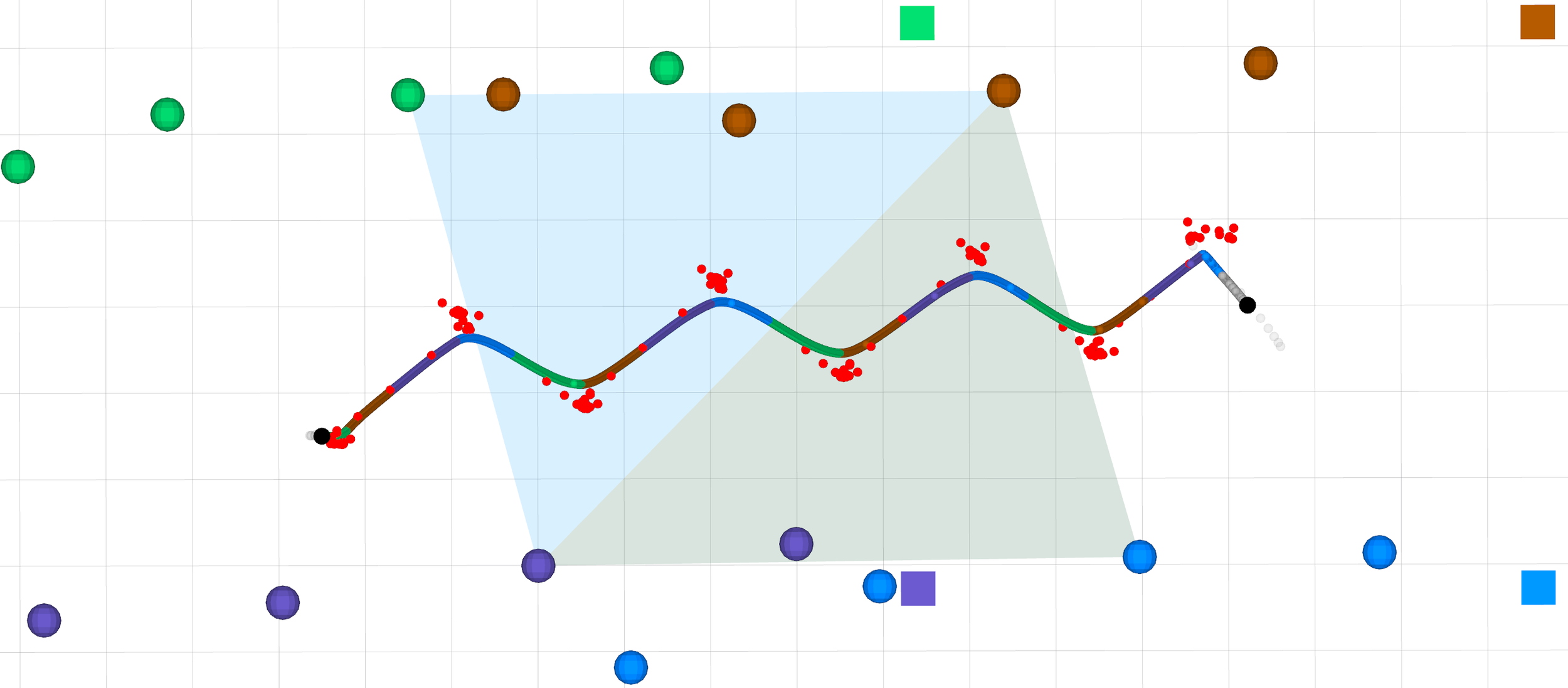
Represent by sequence of fifth-order polynomials
An CoP at \(\mathbf{u}\) in state \(\mathbf{c}\) should cause a specific CoM acceleration.
www.awinkler.me
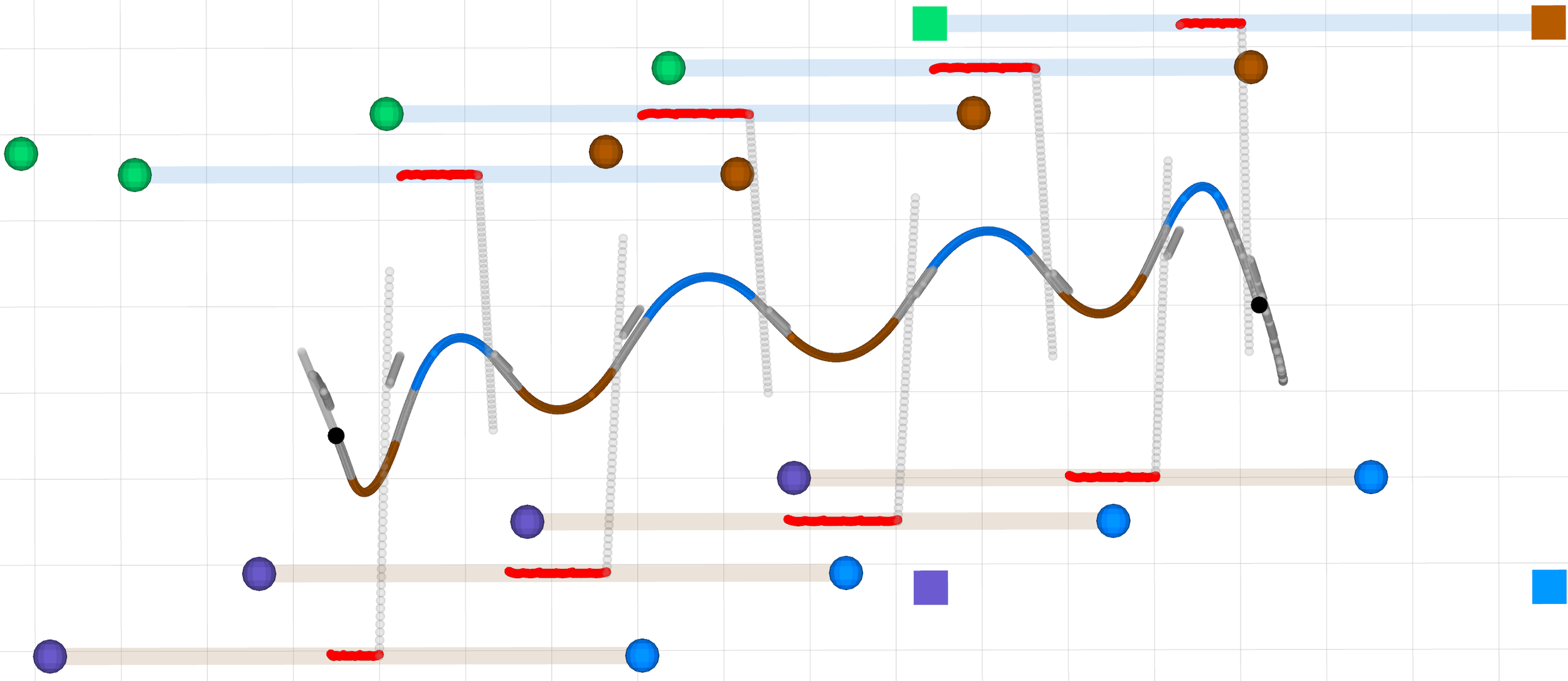
foothold
change
www.awinkler.me
foothold
change
www.awinkler.me
www.awinkler.me
[1] F. Aghili, “A unified approach for inverse and direct dynamics of constrained multibody systems based on linear projection operator,” IEEE T-RO, 2005.
[2] M. Mistry, J. Buchli, and S. Schaal, “Inverse dynamics control of floating base systems using orthogonal decomposition,” IEEE ICRA, 2010
Cartesian \(\to\) Joint:
Joint+Contacts \(\to\) Torque \(^{[1,2]}\):
www.awinkler.me
www.awinkler.me
By Alexander W. Winkler


