Análisis experimental del rendimiento de tres modelos de inundación por tsunami
José Galaz
Programa de Ingeniería Matemática
Departamento de Ingeniería Hidráulica y Ambiental
Pontificia Universidad Católica de Chile
http://slides.com/josegalaz/enim2015
Tsunami inundation =
NSWE + FVM + HPC
= Non-linear shallow water equations
Finite volume methods
High Performance Computing
... at least
Inundación por ondas de tsunamis tectónicos
Longitud característica
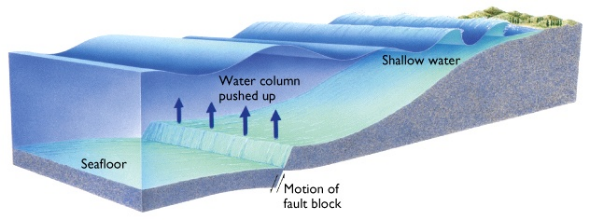
L_0 \approx 100 km
Profundidad promedio del océano:
h_0 \approx 4 km
\sigma = \frac{h_0}{L_0} \approx 0.04
Se puede hacer el supuesto de onda larga:
\sigma = \frac{h_0}{L_0} \approx 0.04 \Rightarrow
\begin{array}{ll}
u_x + v_y + w_z &= 0 \\
\epsilon u_t + \epsilon^2 (u^2)_x + \epsilon^2(uv) + \epsilon^2(uw)_z &= -p_x \\
\epsilon v_t + \epsilon^2 (uv)_x + \epsilon^2(v^2) + \epsilon^2(vw)_z &= -p_y \\
\sigma ^ 2( \epsilon w_t + \epsilon^2 u w_x + \epsilon^2 v w_y + \epsilon^2 w w_z ) &= -p_z - 1
\end{array}
Ecuaciones de Navier-Stokes adimensionalizadas
Presiones hidrostáticas!
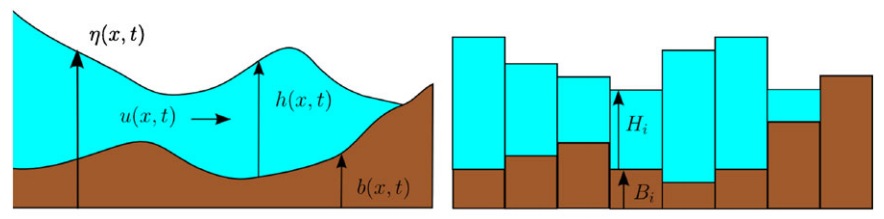
Integrar en un perfil vertical
\overline f := \frac{1}{h}\int_{b(x,y)}^{\eta(x,y)} f(x,y,z) dz
Ecuaciones no lineales de aguas someras (NSWE)
\dfrac{\partial}{\partial t}
\left(
\begin{array}{c}
h \\
hu \\
hv
\end{array}\right)
+
\dfrac{\partial}{\partial x}
\left(
\begin{array}{c}
hu \\
hu^2 + \frac{1}{2}gh^2 \\
huv
\end{array}\right)
+
\dfrac{\partial}{\partial y}
\left(
\begin{array}{c}
hv \\
huv\\
hv^2 + \frac{1}{2}gh^2
\end{array}\right)
=
\left(
\begin{array}{c}
0 \\
-ghb_x - \frac{1}{\rho}\tau_x \\
-ghb_y - \frac{1}{\rho}\tau_y
\end{array}
\right)

Desafíos en la modelación de tsunamis
Desafío n°1:
Ondas de choque e interfaces seco-mojado

Solución:
Métodos de Volúmenes Finitos y el problema de Riemann

Gran Tsunami de Japón, 2011
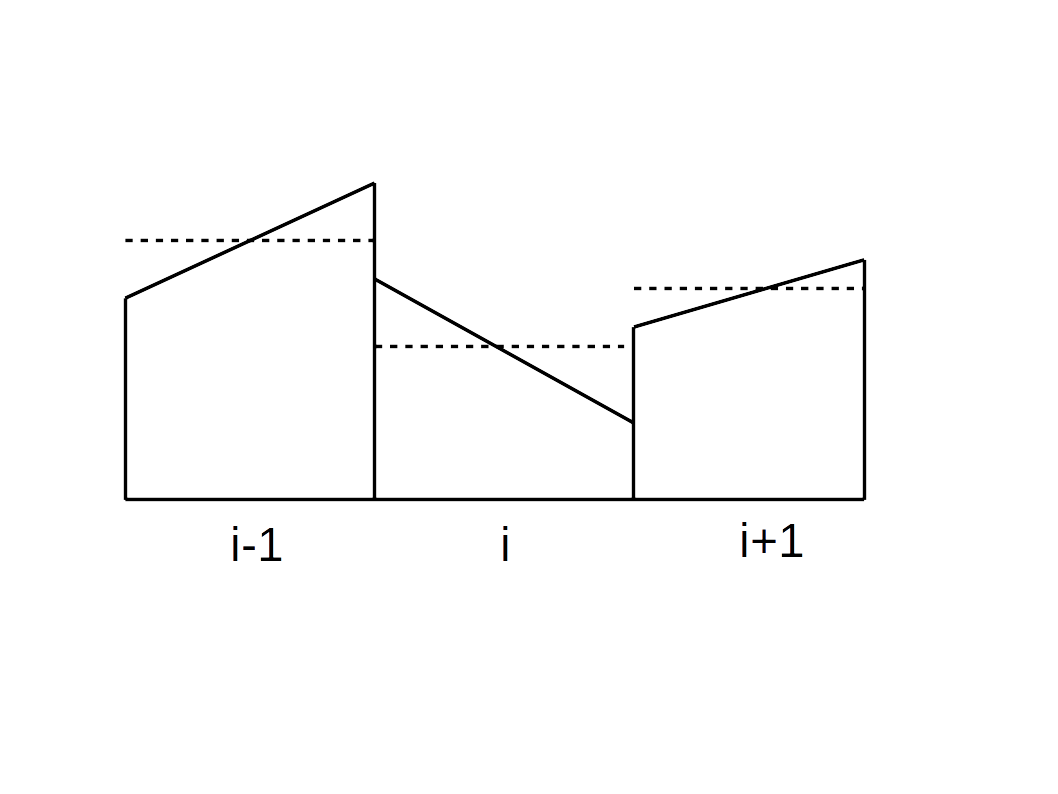
Desafío n°2:
Preservación de estados estacionarios sin oscilaciones espurias.
Solución:
Reconstrucción "well - balanced"
Figure by David George, Washington Univ.
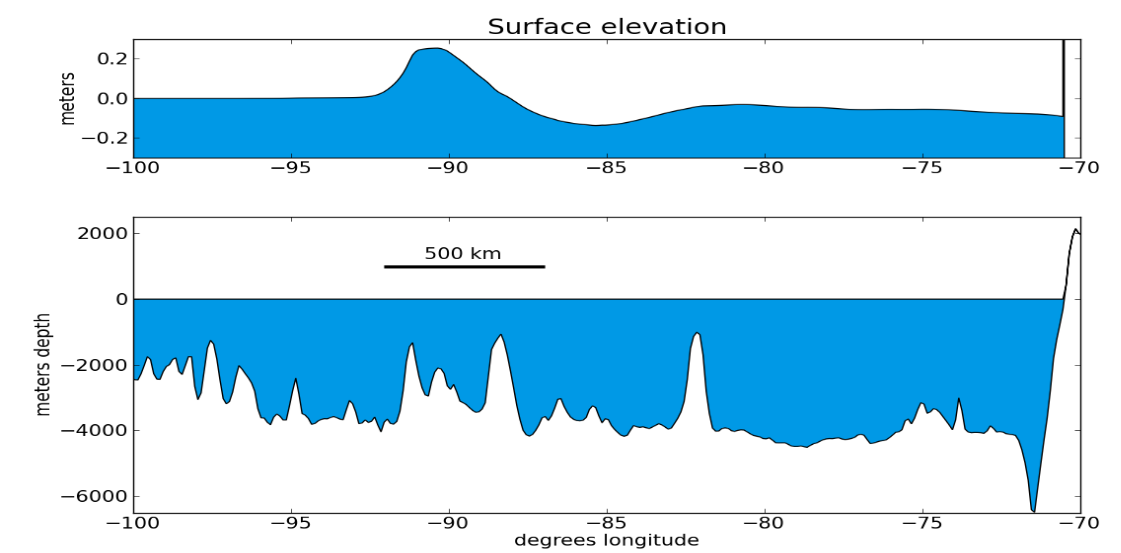
Desafío n°3:
Multiples escalas.
Solución:
-
Algoritmos paralelos (HPC).
-
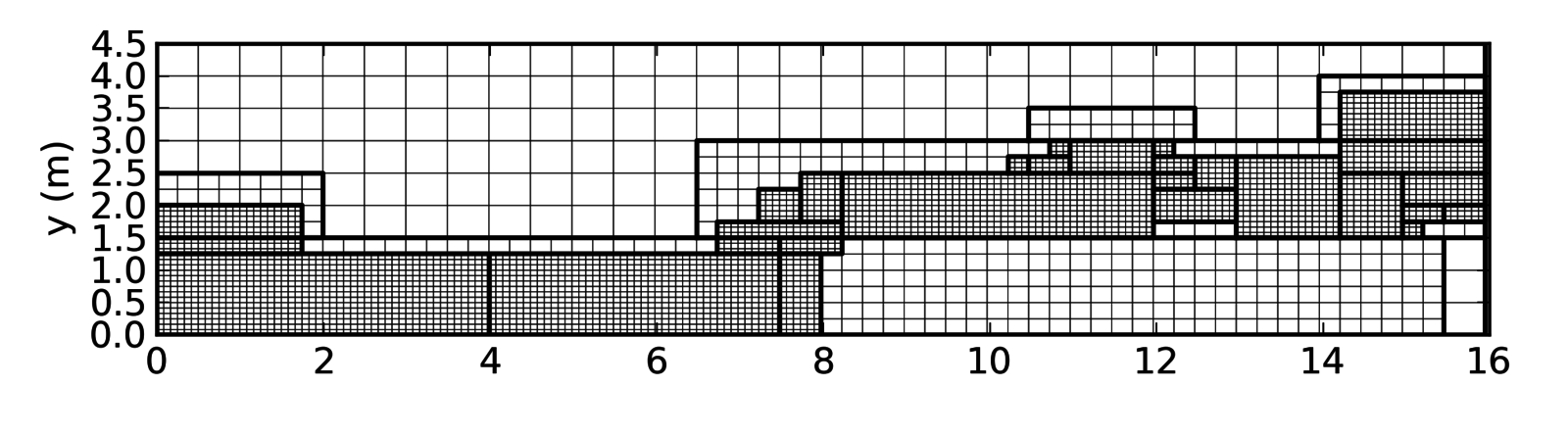
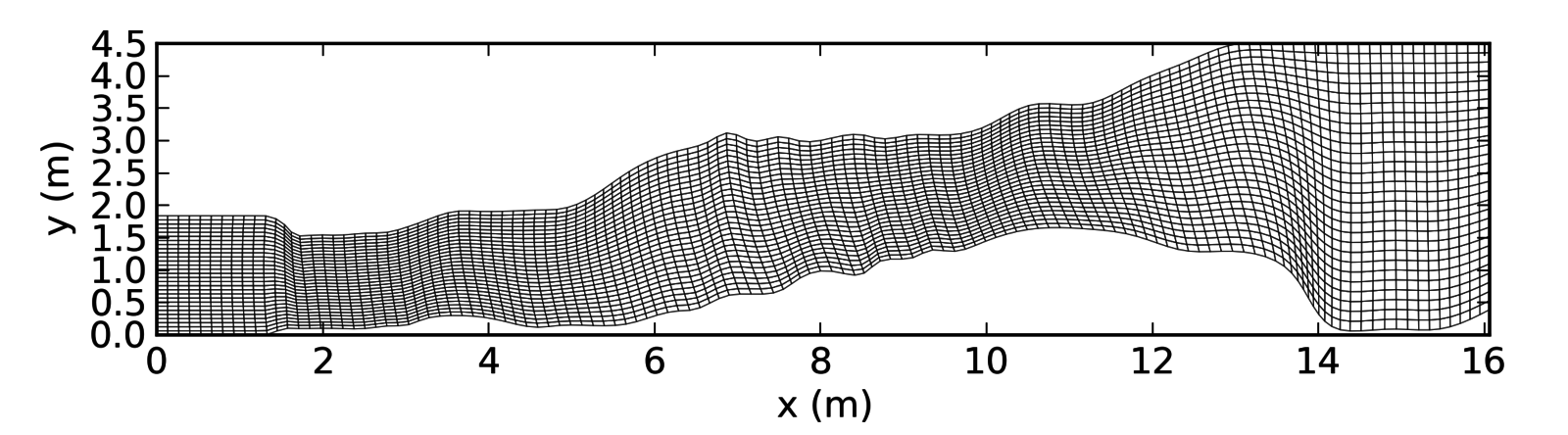
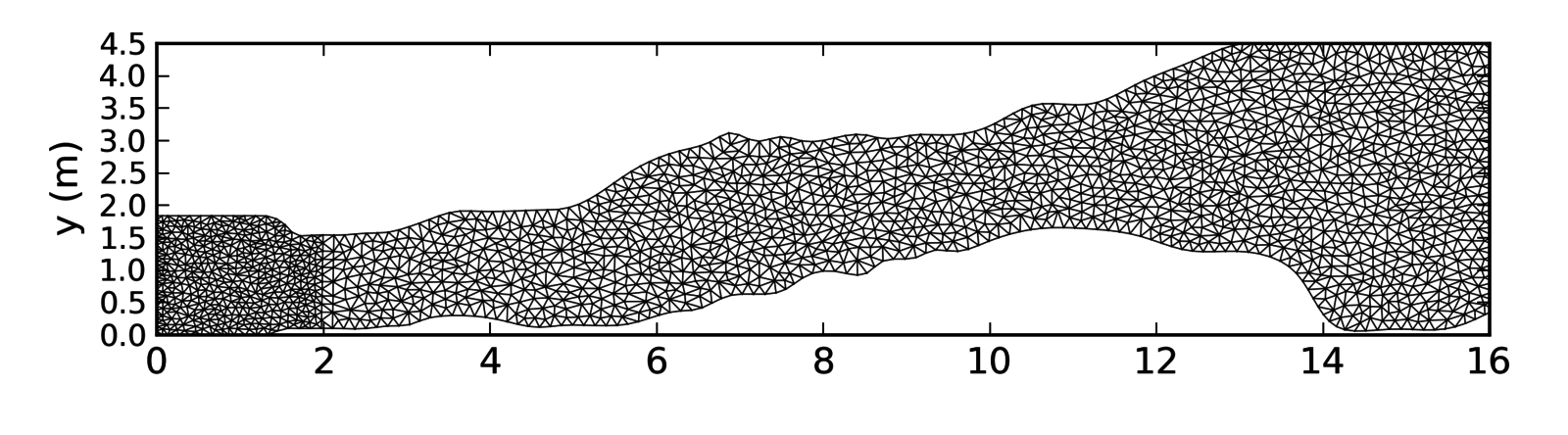
Mallados más eficientes:
- Refinamiento adaptativo
- Mallas no estructuradas
- Mallas traslapadas/curvilíneas
- Acoplamiento de modelos.
- ...
Desafío n°4:
Incertidumbre!
¿Podemos confiar en NSWE-FVM como herramienta de predicción?
Tsunami modelling Uncertainty
Validación
Verificación
Rendimiento
"Hace lo que nos gustaría que hiciera?"
"Hace lo que sabemos que debería hacer?"
"Hace lo que queremos, con los recursos que tenemos ? (ojalá menos)"
Modelos escogidos:
GeoClaw (U. Washington)
AnuGA (U. Australia)
SurfWB-UC (PUC, Chile)
Resultados: Convergencia
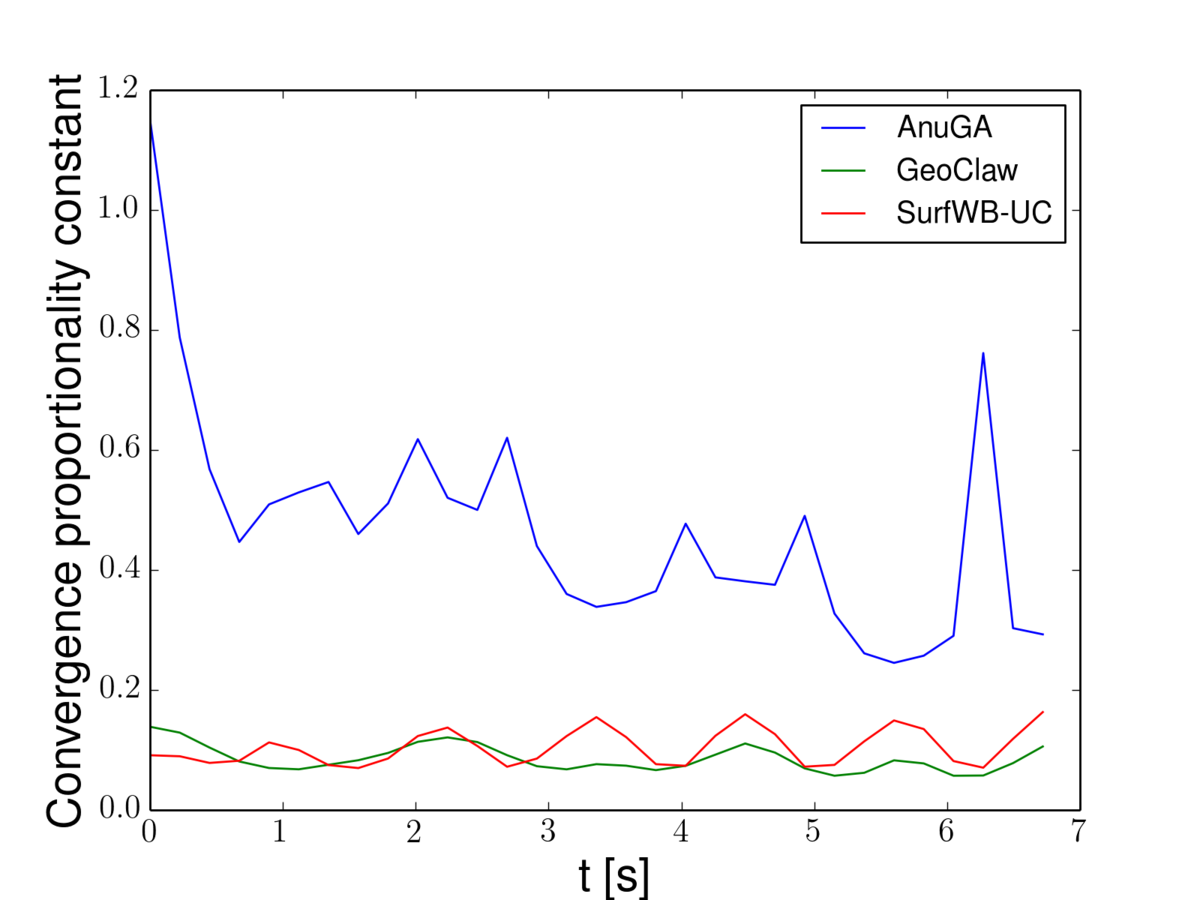
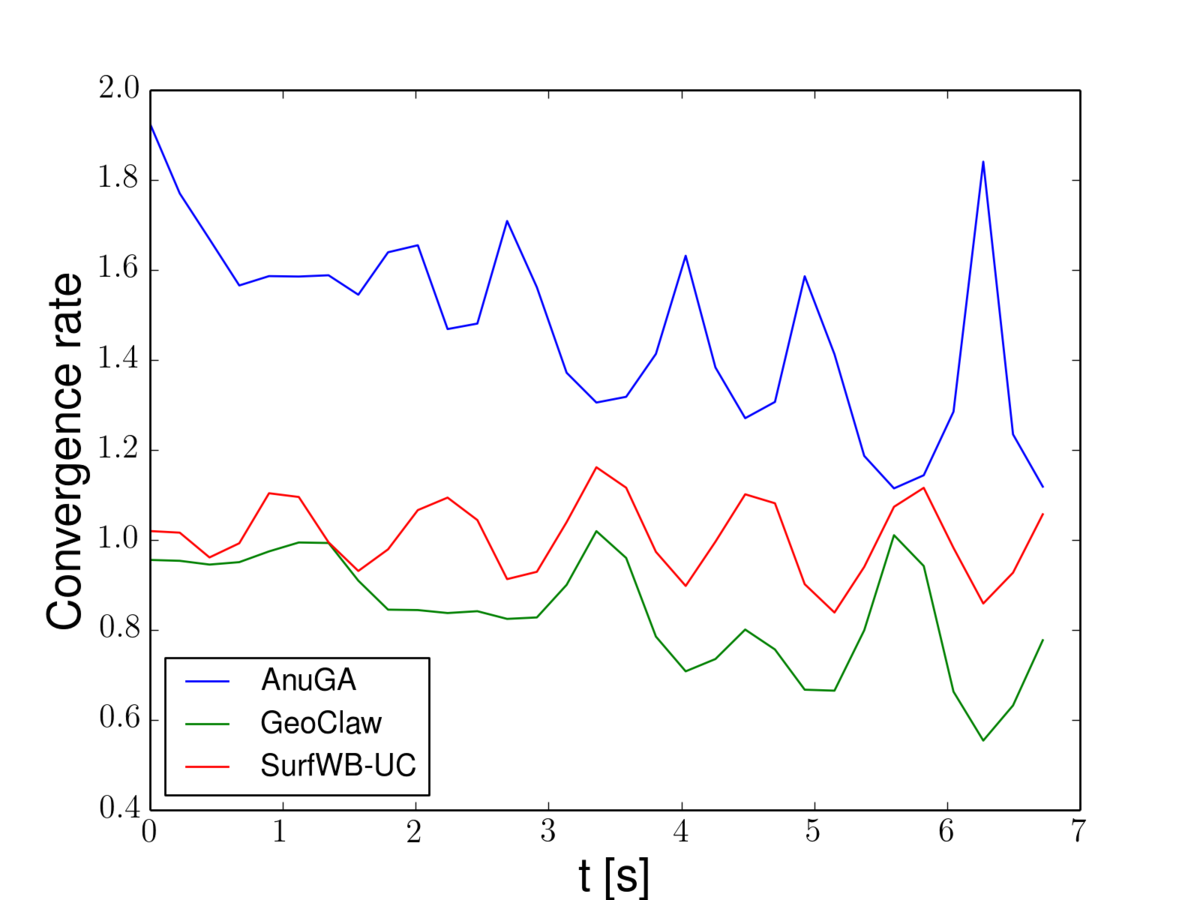
||error ||_{L_1(\Omega_h)} \approx C(t) h^{r(t)}
C(t)
r(t)
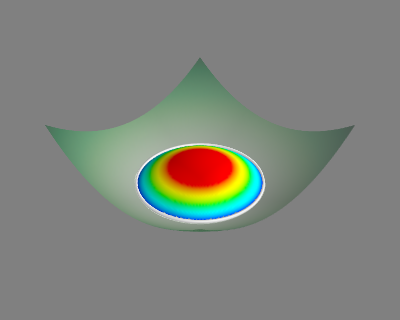
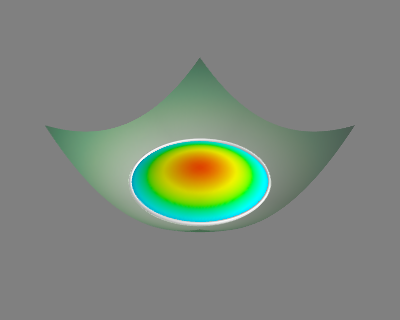
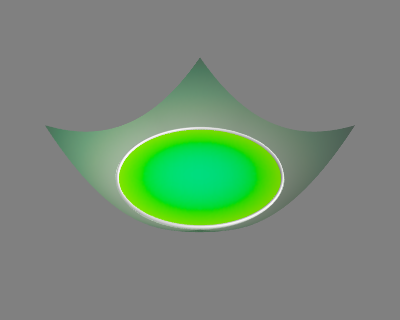
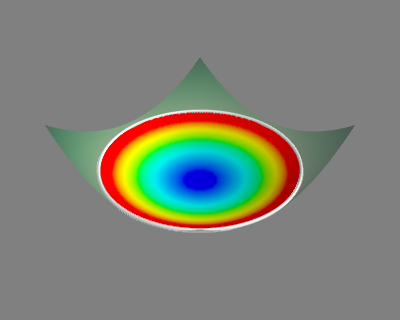
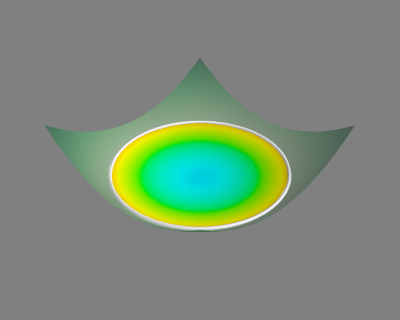
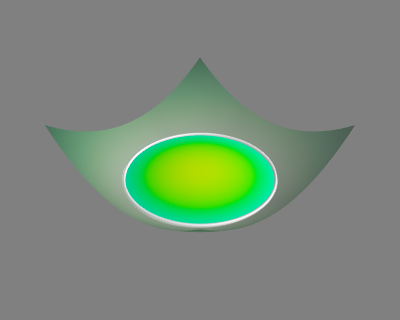
Caso de estudio:
Solución curva de Thacker
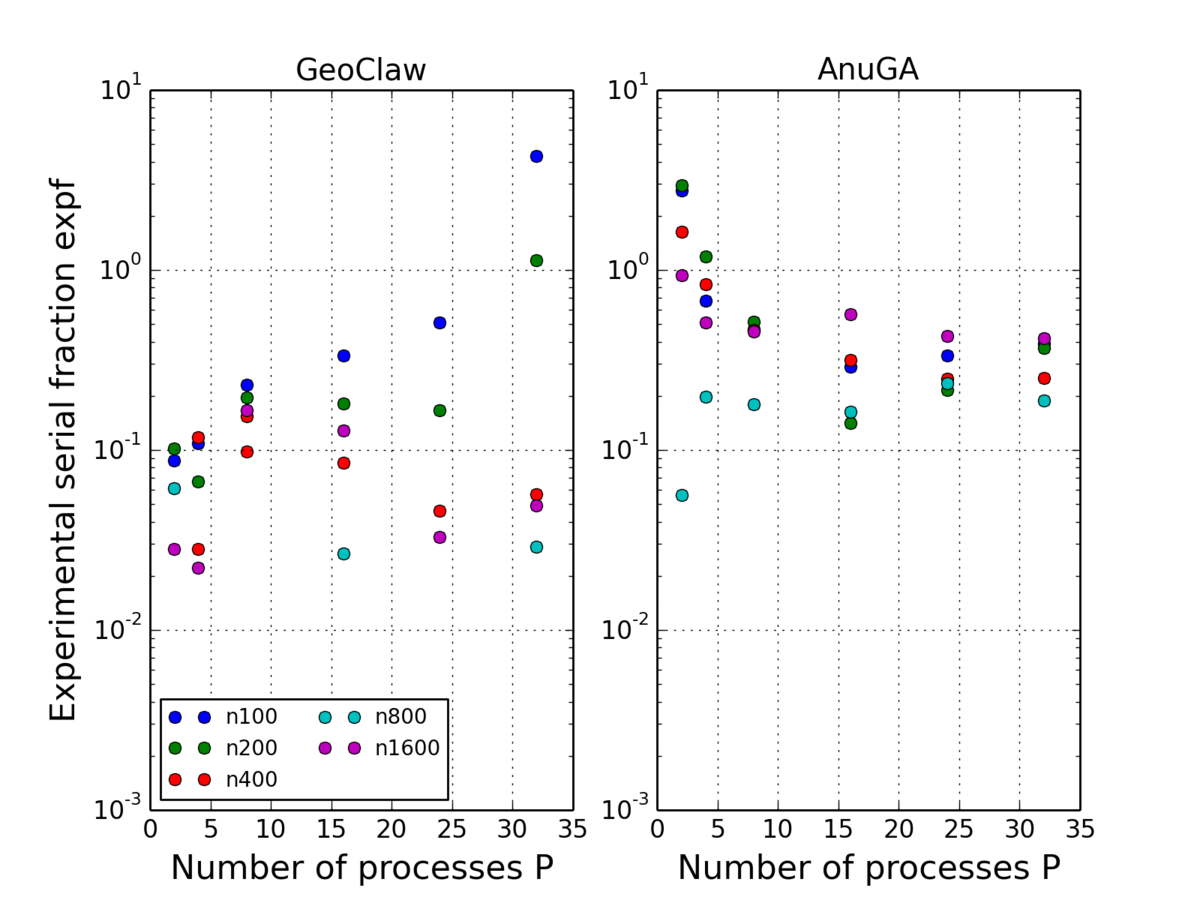
Resultados: Rendimiento
exp_f = \dfrac{\frac{1}{P}-\frac{1}{S_p}}{\frac{1}{P}-1}
Fracción serial de un código: Proporción del código (en ejecución) en que se realizaron tareas inherentemente secuenciales.
Conclusiones
- El rendimiento en paralelo de GeoClaw es superior a AnuGA: se propone como modelo más apto para simulaciones pesadas.
- GeoClaw y SurfWB-UC mostraron propiedades similares en la convergencia.
- AnuGA podría tener peor comportamiento para mallas no demasiado finas (comprobado en otros casos experimentales).
Agradecimientos


ENIM2015
By José Galaz
ENIM2015
Presentación que mostré el 5 de Agosto en el primer Encuentro de Ingeniería Matemática ENIM (www.enim2015.clwww.enim2015.cl realizado en la Universidad Católica de Chile y organizado por el capítulo estudiantil SIAM-PUC.



