Rigid Motions on 3D Digital Space
by Kacper Pluta, University Paris-Est Marne-la-Vallée, Gaspard Monge Laboratory of Computer Science

Technion 13/05/2018
Framework




[\mathbf{R}.\mathbf{x} + \mathbf{t}]
Input data
Output data
Rigid Motions on
\mathbb{Z}^2
rotation matrix
- \mathbf{R}
translation vector
- \mathbf{t}
\cos = \frac{a}{c}, \sin = \frac{b}{c},a,b,c \in \mathbb{Z}
\gcd(a,b,c) = 1.
Interesting properties when
and
integer point
- \mathbf{x}
What are Digitized Rigid Motions?

In general, such transformations are neither surjective nor injective.

Agenda
- Introduction to the cubic grid and 3D rigid motions
- Bijectivity of 3D digitized rotations
- Algorithm for characterizing bijective 3D digitized rotations
- Conclusion & Perspectives
Part I: 3D Bijective Digitized Rotations
- Motivation & Framework
- Alteration of digital images under digitized rigid motions
- Problem as a quadrics arrangement
- Algorithm for computing the arrangement
- Conclusion & Perspectives
Part II: Classifying Rigid Motions of 3D Digital Images
In Collaboration With...




- N. Passat of the University of Reims
- G. Moroz of Inria Nancy
- P. Romon of the University Paris-Est Marne-la-Vallée
- Y. Kenmochi of the CNRS (University Paris-Est)
Part I: 3D Bijective Digitized Rotations
Introduction to 3D Digital Geometry

The Cubic Grid
The cubic lattice is then:


\mathbf{x}
x
z
y
Digitization Model
A digitization cell of
\mathbf{x}
denoted by
\mathcal{C}(\mathbf{x}).

Digitization Model
The digitization operator is defined as
\mathcal{D}: \mathbb{R}^3 \rightarrow \mathbb{Z}^3
such that
\forall \mathbf{x} \in \mathbb{R}^3, \exists! \mathcal{D}(\mathbf{x}) \in \mathbb{Z}^3
\mathbf{x} \in \mathcal{C}(\mathcal{D}(\mathbf{x})).
and
Spatial Rotations and Quaternions
\mathbb{H} = \{w + a i + b j + c k | a,b,c,d \in \mathbb{R} \}
with
i^2 = j^2 = k^2 = i j k = {-1}

Properties:
- Hamilton product is not commutative
- Any rotation can be written as
\mathcal{U} : \mathbf{x} \mapsto q \mathbf{x} q^{-1}
where
q \in \mathbb{H}, \mathbf{x} \in \mathbb{R}^3
- We can derive a rotation matrix
where
K = w^2 + a^2 + b^2 + c^2.
The figure source: http://www.3dgep.com/understanding-quaternions/

U = \mathcal{D}\ \circ \mathcal{U}_{|\mathbb{Z}^3}
Properties
- Non-injective

- Non-surjective
- Do not preserve distances
\mathcal{U}(\mathbb{Z}^3)
Digitized Rigid Motions
Remainders


3D digitized rotation is then
bijective when
\forall \mathbf{y} \in \mathbb{Z}^3\ \exists! \mathbf{x} \in \mathbb{Z}^3, S_q(\mathbf{x},\mathbf{y}) \in \mathcal{C}(\mathbf{0})

Bijectivity of 3D Digitized Rotations
Remainders
Equivalently and more computationally friendly (we will see later)

such that
S_{q}(\mathbb{Z}^3,\mathbb{Z}^3) \cap ((\mathcal{C}(\mathbf{0}) \cup q \mathcal{C}(\mathbf{0}) q^{-1}) \setminus (\mathcal{C}(\mathbf{0}) \cap q \mathcal{C}(\mathbf{0}) q^{-1})) = \varnothing


Group Spanned by Values of
S_q

Proposition
If all the generators of
\mathcal{G}_q
have only rational terms, then there exist vectors

which are the
minimal generators of
\mathcal{G}_q.

Group Spanned by Values of
S_q

Lemma
If
\mathcal{G}_q
is dense, then the
corresponding 3D digitized rotation is not bijective.
Group Spanned by Values of
S_q
Conjecture
If
\mathcal{G}_q
has a dense factor, the
corresponding digitized rotation is not bijective.

Lipschitz Quaternions and Rational Rotations
Proposition
There is a two-to-one correspondence between the set of Lipschitz quaternions
\mathbb{L} = \{ w + a i + b j + c k | w,a,b,c \in \mathbb{Z}\}
such that the
\gcd(w,a,b,c) = 1,
and the set of rational rotations.
where
K = w^2 + a^2 + b^2 + c^2.
\mathbf{R} =

Bijectivity Characterization Algorithm

Turning into Integers
Since we have
q \cdot \mathbf{x} \cdot q^{-1}
where
q^{-1} = \frac{\bar{q}}{|q|^2}
and
\mathcal{G}_q
is rational, we can
multiply by
|q|^2
and obtain an integer lattice.


Reducing the Left Factor
We are allowed to divide on the left by q while keeping integer valued functions.



Characterization Algorithm Step 1

To check if
\mathbf{w} \in \mathbb{Z}^4
belongs to values
of
S'_{q},
first verify whether
w w_1 - a w_2 - b w_3 - c w_4 = 0
Characterization Algorithm Step 2
Then we solve the following Diophantine system:
\mathbf{Az} = \mathbf{w}
where
\mathbf{z}^t = (\mathbf{x}, \mathbf{y}) \in \mathbb{Z}^6
and
The complexity of reducing
\mathbf{A} \text{ is } \mathcal{O}(\log^2N(\mathbf{A})).


The final complexity is
\mathcal{O}(|q|^3 + \log^2N(\mathbf{A})).
Some Experimental Results


The question is how to analytically characterize such quaternions?
Bijective Digitized Rotations
Square Lattice
A digitized rotation is bijective if and only if the corresponding Gaussian Integer
\alpha
is of the form
\alpha = (k+1) + k i, k \in \mathbb{Z}^+,
i.e. it corresponds to a twin primitive Pythagorean triple.
Hexagonal Lattice
A digitized rotation is bijective if and only if the corresponding Eisenstein Integer
\alpha
has generators of the form
s= 1, t > 0
or
s>0, t = s + 1.






Conclusion and Perspectives
- Analytical characterization of bijective 3D digitized rotations
- Proving our conjecture on semi-dense groups
Perspectives
- Existence of bijective non-simple 3D digitized rotations
- Algorithm for characterization of bijectivity of 3D digitized rotations
- Implementation of the algorithm released under a BSD license
Conclusion
Part II: Quadrics Arrangement in Classifying Rigid Motions of a 3D Digital Image






Motivation
Spatial Rotations and Cayley Transform
\mathbf{R} = (\mathbf{I} - \mathbf{A})(\mathbf{I} - \mathbf{A})^{-1}
where
K = 1 + a^2 + b^2 + c^2
and
\mathbf{R} =

\mathbf{A} =

Image Patch
In general, we consider a finite set
\mathcal{N} \subset \mathbb{Z}^3,
called an image
patch whose center
\mathbf{c}
and radius
r
of
\mathcal{N}
are given by
\mathbf{c} = \frac{1}{|\mathcal{N}|} \sum_{\mathbf{v} \in \mathcal{N}}
and
r = \max_{\mathbf{v}\in \mathcal{N}} \|\mathbf{v} - \mathbf{c}\|,
respectively.
Definition
Image Patch
For example, let's consider the image patch
\mathcal{N} = \{ (1,0,0), (0,1,0), (0,0,1), (0,0,0), (-1,0,0), (0,-1,0), (0,0,-1) \}
where the center is
(0,0,0).

Alterations Step-by-Step


Alterations Step-by-Step

Alterations Step-by-Step


Critical Rigid Motions

Formulation
\mathbf{R}_i \mathbf{v} + t_i = k_i - \frac{1}{2}
where
\mathbf{v} \in \mathcal{N} \subset \mathbb{Z}^3, k_i \in \mathbb{Z} \cap [-r', r']
and
r + \sqrt{3}.
Critical Rigid Motions
Formulation
\mathbf{R}_i \mathbf{v} + t_i = k_i - \frac{1}{2}
where
\mathbf{v} \in \mathcal{N} \subset \mathbb{Z}^3, k_i \in \mathbb{Z} \cap [-r', r']
and
r + \sqrt{3}.
The parameter space
\Omega = \left\{(a,b,c,t_1,t_2,t_3) \in \mathbb{R}^6 | a,b,c \geq 0, -\frac{1}{2} < t_i < \frac{1}{2} \text{ for } i = 1,2,3\right\}
Problem as Arrangement of Hypersurfaces
The surfaces are given by
\mathbf{R}_i \mathbf{v} + t_i = k_i - \frac{1}{2}
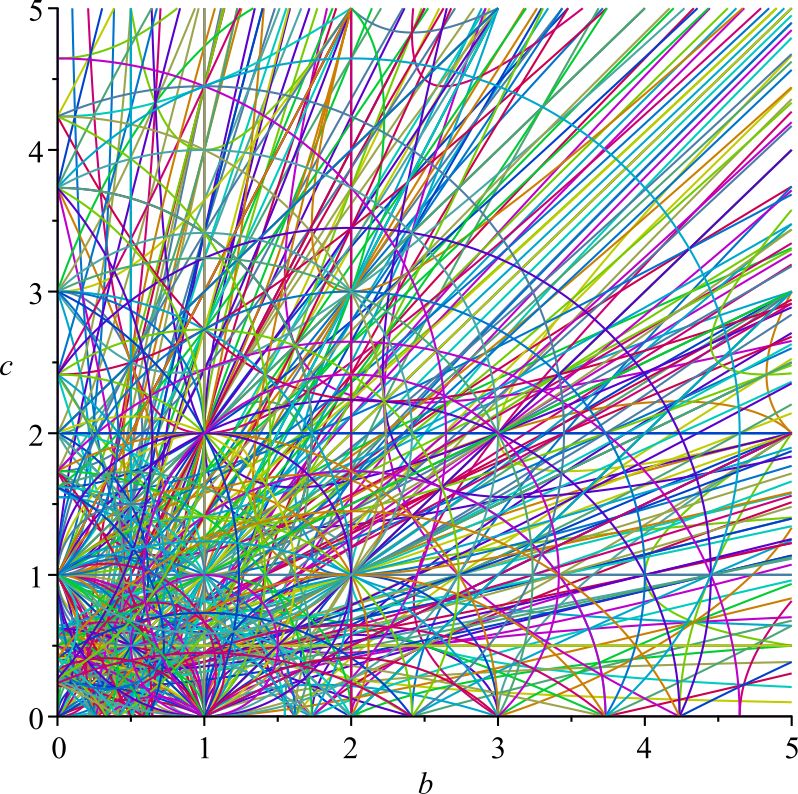
Figure: Visualization 3D parameter space of 2D digitized rigid motions

Problem as Arrangement of Hypersurfaces
In particular, the surfaces are given by
Figure: Visualization 3D parameter space of 2D digitized rigid motions
\frac{1 - a^2}{1+a^2}v_1 - \frac{2a}{1+a^2}v_2 + t_1 = k_1 - \frac{1}{2}
\frac{2a}{1+a^2}v_1 + \frac{1-a^2}{1+a^2}v_2 + t_2 = k_2 - \frac{1}{2}
Problem as Arrangement of Hypersurfaces
Complexity of the arrangement
Overall number of hypersurfaces is
\mathcal{O}(r^4)
and the complexity of the
arrangement is bounded by number of hypersurfaces to the power of dimensionality of the space
\mathcal{O}(r^{24}).
Dimension Reduction

Uncoupling the Parameters
k_i - \frac{1}{2} < \mathbf{R}_i\mathbf{v} + t_i < k_i + \frac{1}{2}

x
y
z
\mathcal{U}(\mathbf{v})
Uncoupling the Parameters
k_i - \frac{1}{2} -\mathbf{R}_i\mathbf{v} < t_i < k_i + \frac{1}{2} -\mathbf{R}_i\mathbf{v}
x
y
z
\mathcal{U}(\mathbf{v})
Uncoupling the Parameters

\mathbf{k}'_i - \frac{1}{2} - \mathbf{R}_i \mathbf{v}' < \mathbf{k}_i + \frac{1}{2} - \mathbf{R}_i \mathbf{v}.
\exists \mathbf{k}, \mathbf{k}'
a,b,c
A configuration exists if there are
\forall \mathbf{v}, \mathbf{v}' \in \mathcal{N}_r
such that
such that
Uncoupling the Parameters
Thanks to the rational expressions in Cayley Transform we obtain
polynomials of degree 2:
q_i[\mathbf{v},k_i](a,b,c) = (1+a^2+b^2+c^2)(2k_i-1-2\mathbf{R}_i\mathbf{v})
Uncoupling the Parameters
We then study arrangement of quadrics defined as
Q_i[\mathbf{v},\mathbf{v}',k_i,k'_i](a,b,c) = q_i[\mathbf{v},k_i](a,b,c) + 2(1+a^2+b^2+c^2) - q_i[\mathbf{v}',k'_i](a,b,c)


Using Sylvester's Law of Inertia we can prove that the only real Euclidean types are hyperboloid of one sheet and hyperbolic paraboloid.
Reducing Set of Quadrics
Discarding quadrics
For example, if we consider the image patch
\mathcal{N} = \{ (1,0,0), (0,1,0), (0,0,1), (0,0,0), (-1,0,0), (0,-1,0), (0,0,-1) \},
we directly obtain 441 quadrics while only 81 are necessary to consider.
The discarded quadrics are:
- of non-real Euclidean type i.e., empty or complex
- quadrics equivalent up to a multiplication by a constant
What do we want to compute?
At least one sample point for each 3-dimensional connected component of the set
Q_i[\mathbf{v},\mathbf{v}',k_i,k'_i](a,b,c) \neq 0.
Computing Arrangement of Quadrics

Relations with Previous Studies
B. Mourrain, J. P. Tecourt, and M. Teillaud: On the Computation of an
Arrangement of Quadrics in 3D, Computational Geometry 30(2), Elsevier (2005)
What is different?
- Use of non-generic directions
-
Support for asymptotic critical values
-
We only store 3D sample points
Global Idea of the proposed Algorithm
- Along non-generic direction, detect and sort all the events in which the topology of the arrangement changes
-
Between two consecutive events, place a plane, intersect it with the quadrics, and compute one point in each connected component bounded by conics

a_1
a_2
a
b
c
Detection of Events


First intersections for an image patch of
r = 1,2,3,
respectively.
Detection of Events
Q_i(s,b,c) = \partial_b Q_i(s,b,c) = \partial_c Q_i(s,b,c) = 0
a
b
c

Detection of Events
Q_i(s,b,c) = Q_j(s,b,c) = (\nabla Q_i \times \nabla Q_j)_1(s,b,c) = 0
a
b
c

Detection of Events
Q_i(s,b,c) = Q_j(s,b,c) = Q_k(s,b,c) = 0
a
b
c

Detection of Events
An asymptote lives in a quadric.

b
a
c
Detection of Events


A curve given by an intersection of two quadrics is an asymptote.
c
b
a
a = \frac{1}{2}
a
c
Recovering the Translational Part

Recovering the Translational Part



Sample points of the translational part can be computed from the
sample points of the previous step from
k_i - \frac{1}{2} -\mathbf{R}_i\mathbf{v} < t_i < k_i + \frac{1}{2} -\mathbf{R}_i\mathbf{v}
Implementation
- Maple 2015 and later
- Support for Maple Grid framework
- Computation can be restarted e.g., after a crash
- Partial support for clusters compatible with POSIX
- Support for FGb library written by Jean-Charles Faugère
- We found and reported a few bugs in Maple and a bug in Linux
- Released under Revisited BSD License
https://github.com/copyme/RigidMotionsMapleTools
Conclusion and Perspectives
- Optimization of the implementation by exploring symmetry of the variables
-
Identification of image patches which break connectivity under 3D digitized rigid motions
Perspectives
-
A new algorithm for computing arrangement of quadrics in 3D
-
Use of non-generic directions
-
Taking in to account asymptotic critical values
Conclusion
Thank you for your attention!
Rigid Motions on 3D Digital Space
By Kacper Pluta
Rigid Motions on 3D Digital Space
Slides used for a seminary talk at Technion – Israel Institute of Technology.




