OUR ROADMAP TO USEFUL ROBOTICS

HELLO!
Ugo Cupcic - Chief Technical Architect
-
A complex product
-
Making it more useful
-
Going deeper
-
A complex product
-
Making it more useful
-
Going deeper



1987 -> 2016


Manipulation / Autonomous Grasping / High Level UI
GSC
CAPABILITY GAP

-
A complex product
-
Making it more useful
-
Going deeper
-
A complex product
-
Making it more useful
-
Going deeper
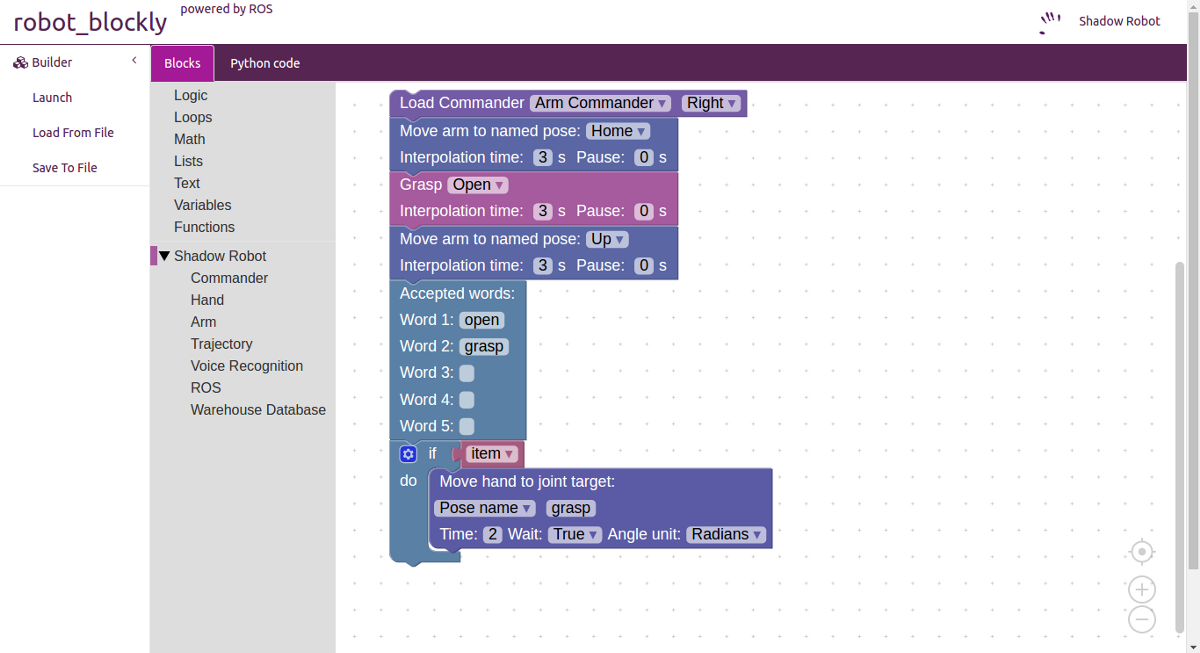
A simple yet powerful UI
-
A complex product
-
Making it more useful
-
Going deeper
-
A complex product
-
Making it more useful
-
Going deeper
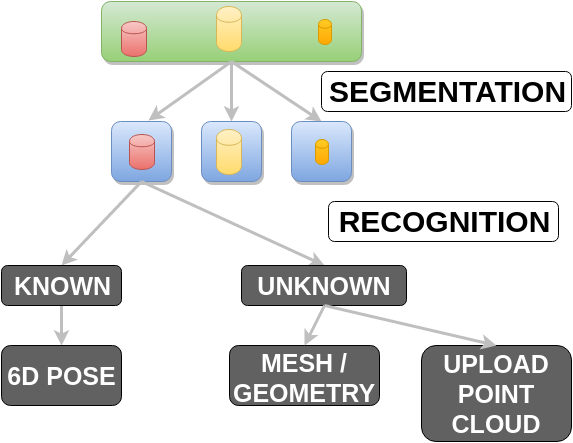
VISION PIPELINE - ROBOT
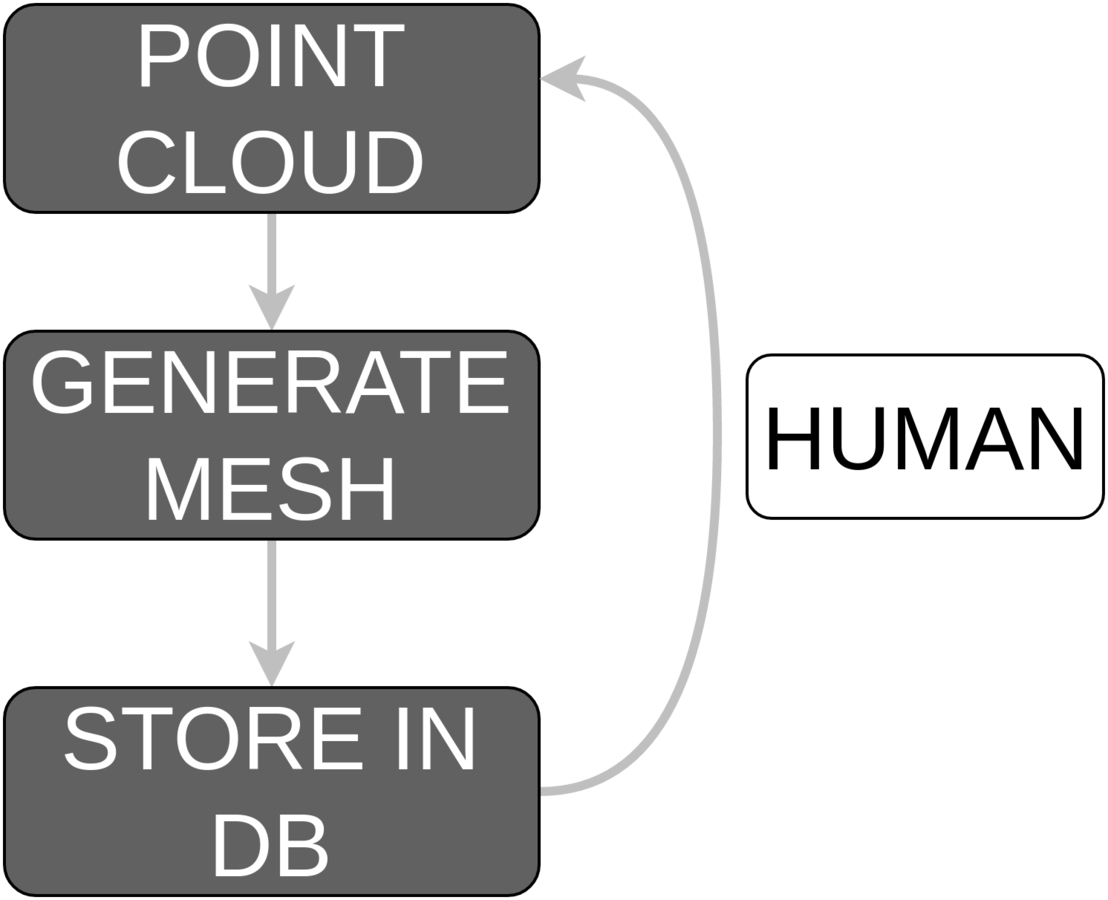
VISION PIPELINE - CLOUD
GRASPING - INSPIRATION
Optimal Control with Learned Local Models: Application to Dexterous Manipulation
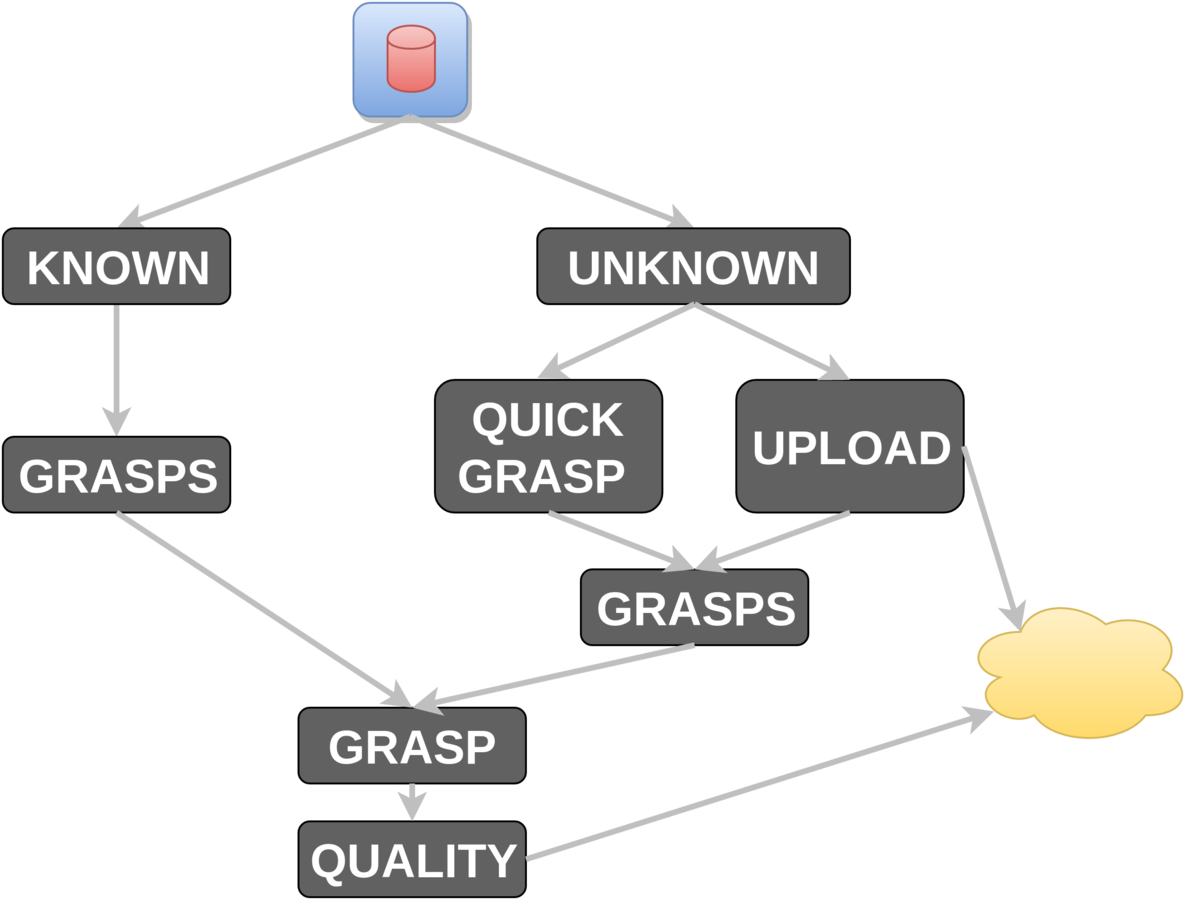
GRASP PIPELINE - ROBOT
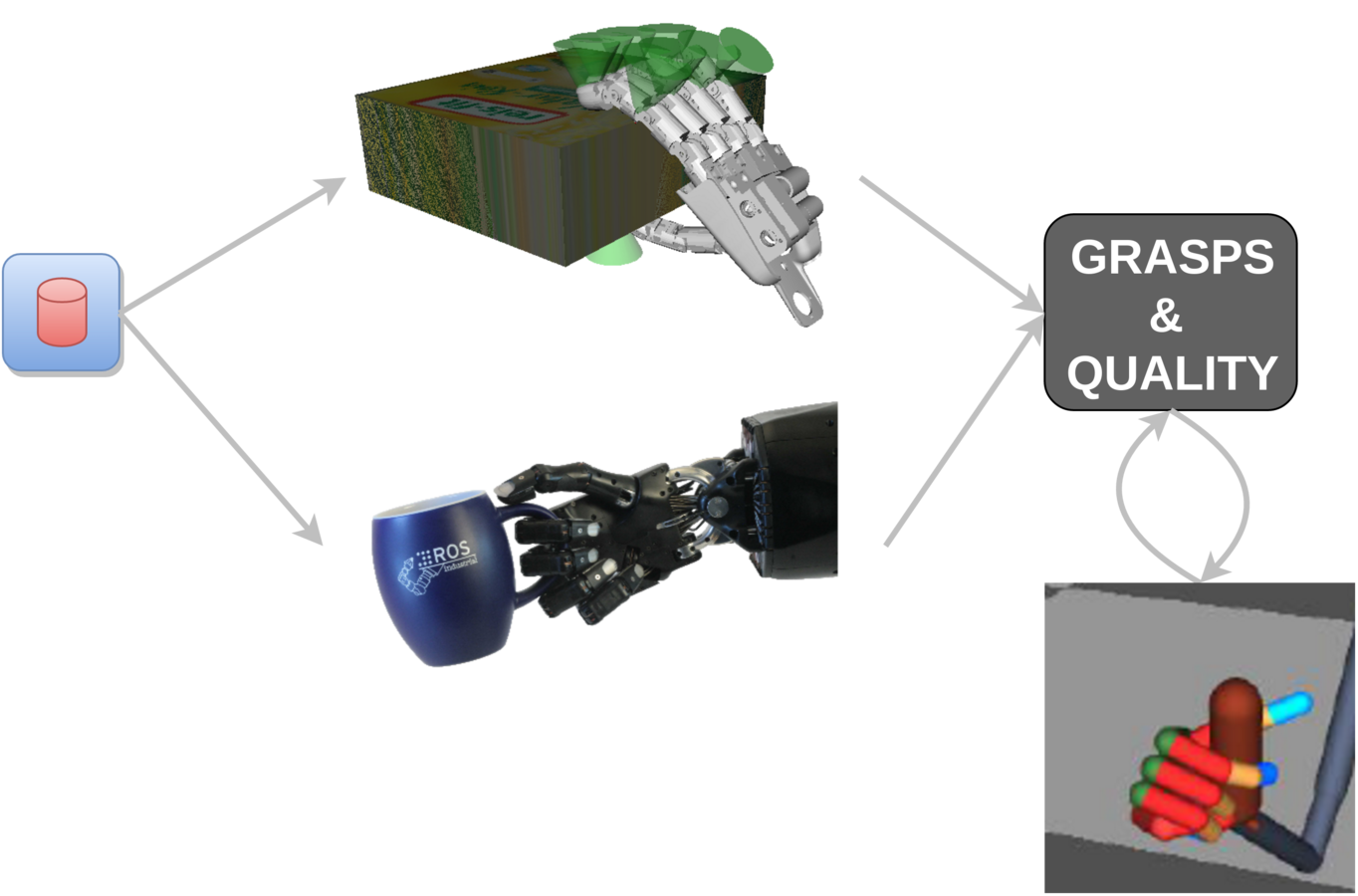
GRASP PIPELINE - CLOUD
QUICK GRASP
Guillaume Walck - Bielefeld
GRASP QUALITY
-
A complex product
-
Making it more useful
-
Going deeper
THANKS!
We're hiring! - ugo@shadowrobot.com
Our roadmap to useful robotics
By Ugo Cupcic
Our roadmap to useful robotics
To deliver the best hands in the world, we've collaborated with the best researchers. But what does it take to reach out of a research oriented market? Solve real world problems using robots? We're convinced that tailoring a custom solution for each problem is not the way forward. We want the people facing those problem to be able to use our solutions themselves. And we have a roadmap to get there.