

















Saverio Bolognani
Senior Scientist at ETH Zurich
Saverio Bolognani
24 October 2024
3 faculty members (Lygeros, Dörfler, Smith) +1
a few Senior Scientists
15 Postdocs, 30+ PhD students
Process automation, concept of control. Modelling of dynamical systems - examples, state space description, linearisation, analytical/numerical solution. Laplace transform, system response for first and second order systems - effect of additional poles and zeros. Closed-loop control - idea of feedback. PID control, Ziegler - Nichols tuning. Stability, Routh-Hurwitz criterion, root locus, frequency response, Bode diagram, Bode gain/phase relationship, controller design via "loop shaping", Nyquist criterion. Feedforward compensation, cascade control. Multivariable systems (transfer matrix, state space representation), multi-loop control, problem of coupling, Relative Gain Array, decoupling, sensitivity to model uncertainty. State space representation (modal description, controllability, control canonical form, observer canonical form), state feedback, pole placement - choice of poles. Observer, observability, duality, separation principle. LQ Regulator, optimal state estimation.
Process automation, concept of control. Modelling of dynamical systems - examples, state space description, linearisation, analytical/numerical solution. Laplace transform, system response for first and second order systems - effect of additional poles and zeros. Closed-loop control - idea of feedback. PID control, Ziegler - Nichols tuning. Stability, Routh-Hurwitz criterion, root locus, frequency response, Bode diagram, Bode gain/phase relationship, controller design via "loop shaping", Nyquist criterion. Feedforward compensation, cascade control. Multivariable systems (transfer matrix, state space representation), multi-loop control, problem of coupling, Relative Gain Array, decoupling, sensitivity to model uncertainty. State space representation (modal description, controllability, control canonical form, observer canonical form), state feedback, pole placement - choice of poles. Observer, observability, duality, separation principle. LQ Regulator, optimal state estimation.
What control design tasks can you already solve?
What is blocking you from solving more complicated ones?
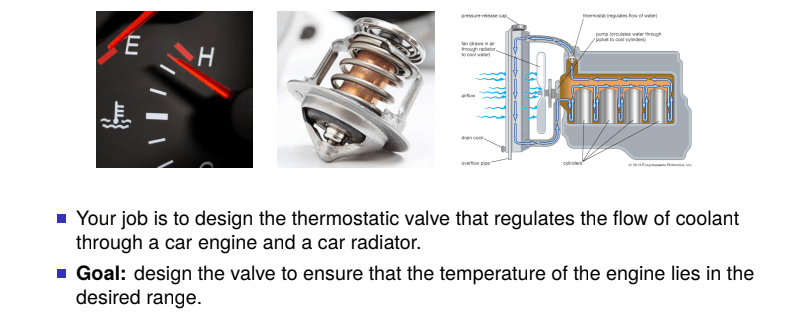
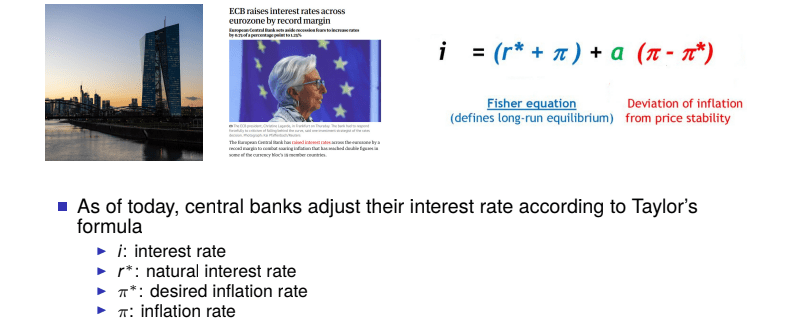
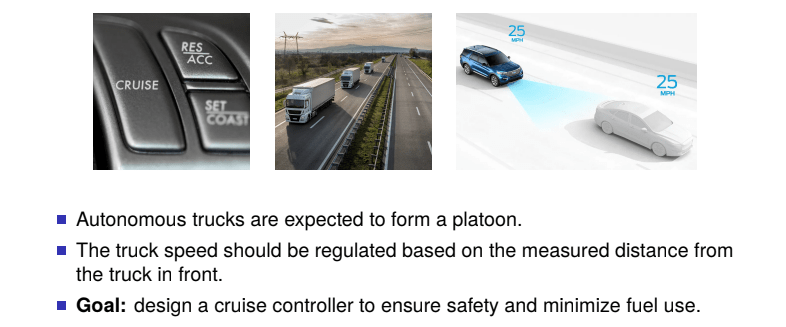
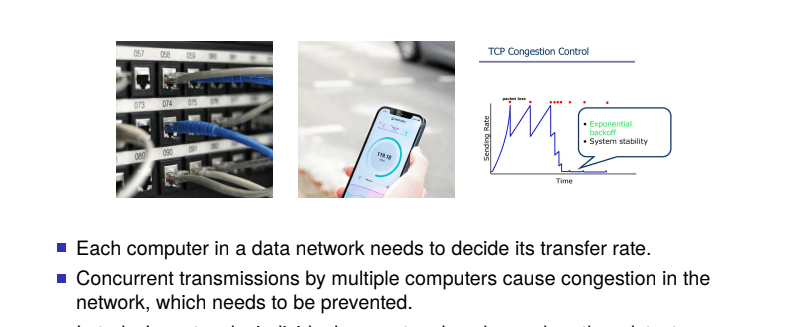
For each design problem:
Insight: Bring props.
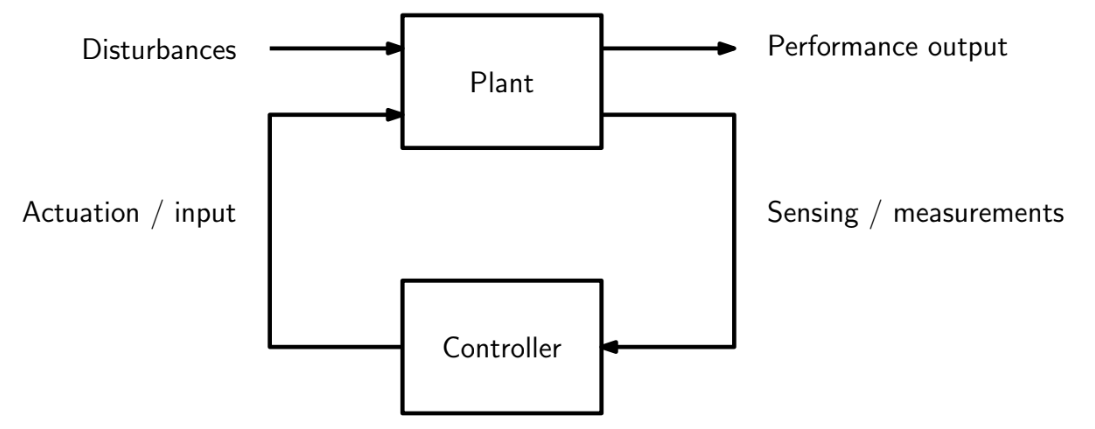
Show students what a controller is.
Systems in which the controller is an embedded computer that can sense and actuate a physical plant.
Insight: Tell the students what kind of experts they will become
Suitable for systems where model uncertainty, stringent constraints, and complex dynamics call for advanced control solutions.
(13 weeks)
Dynamic Programming and LQR
Model Predictive Control
Economic MPC
Robust MPC
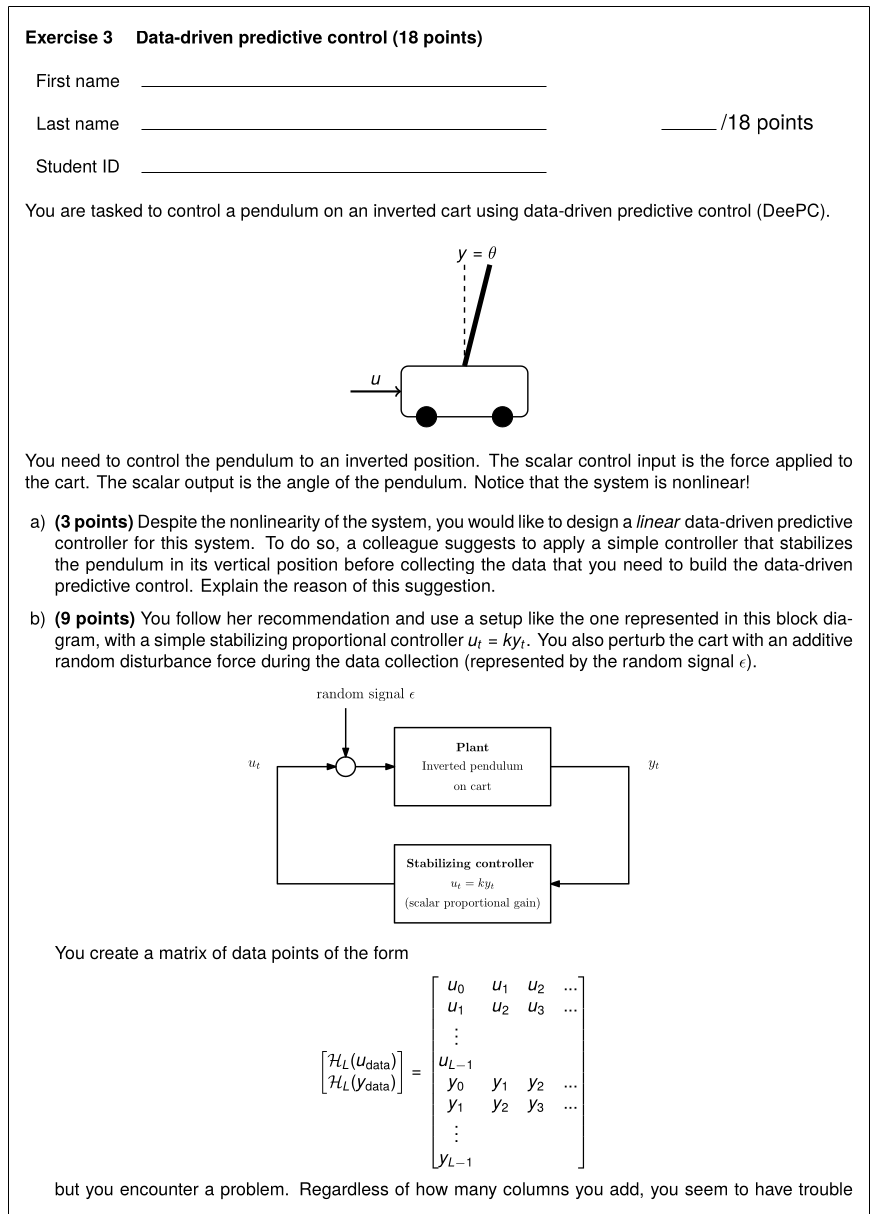
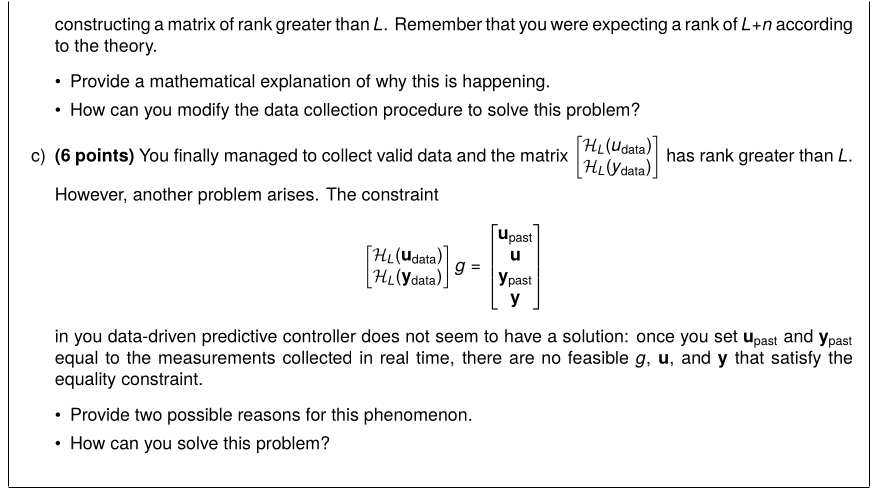
Data-Driven Predictive Control
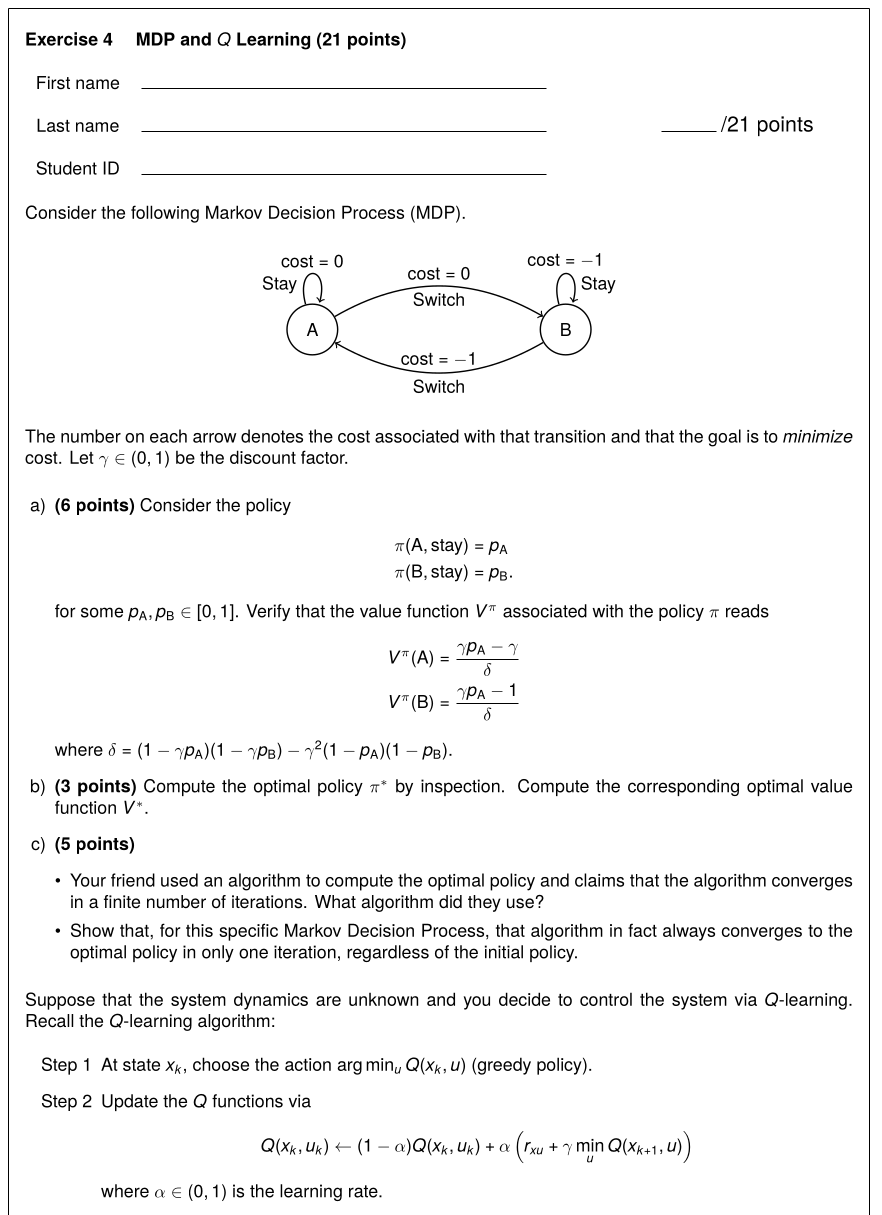
Markov Decision Processes
Monte Carlo Learning (episodic)
Reinforcement Learning (online)
LTI
Discrete-time
state space
representation
Markov decision process
LQR
- State-space representation
- Optimal control problems
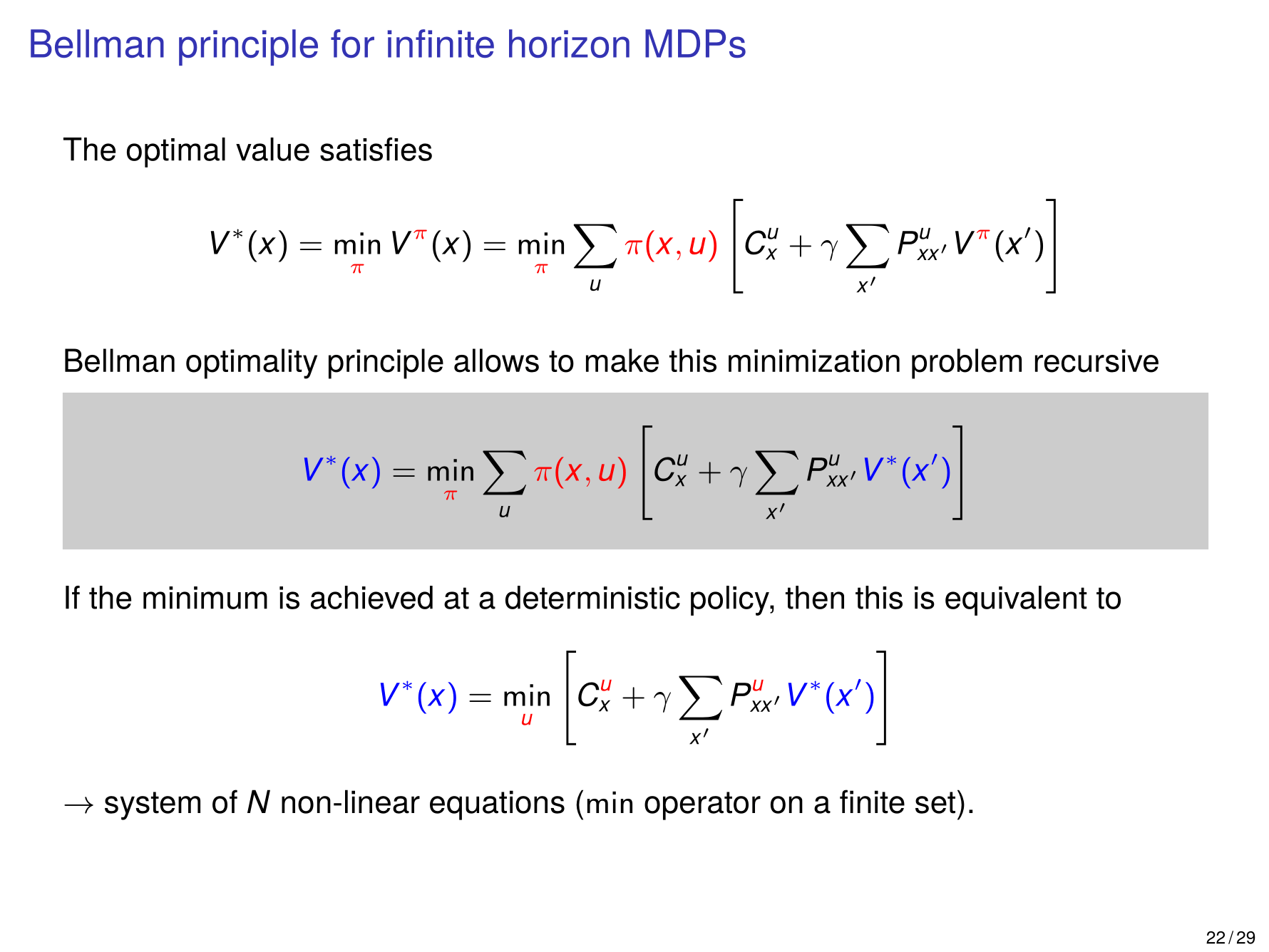
- Markovianity and Bellman principle
- Concept of value function
- Closed-form solution of linear-quadratic problems
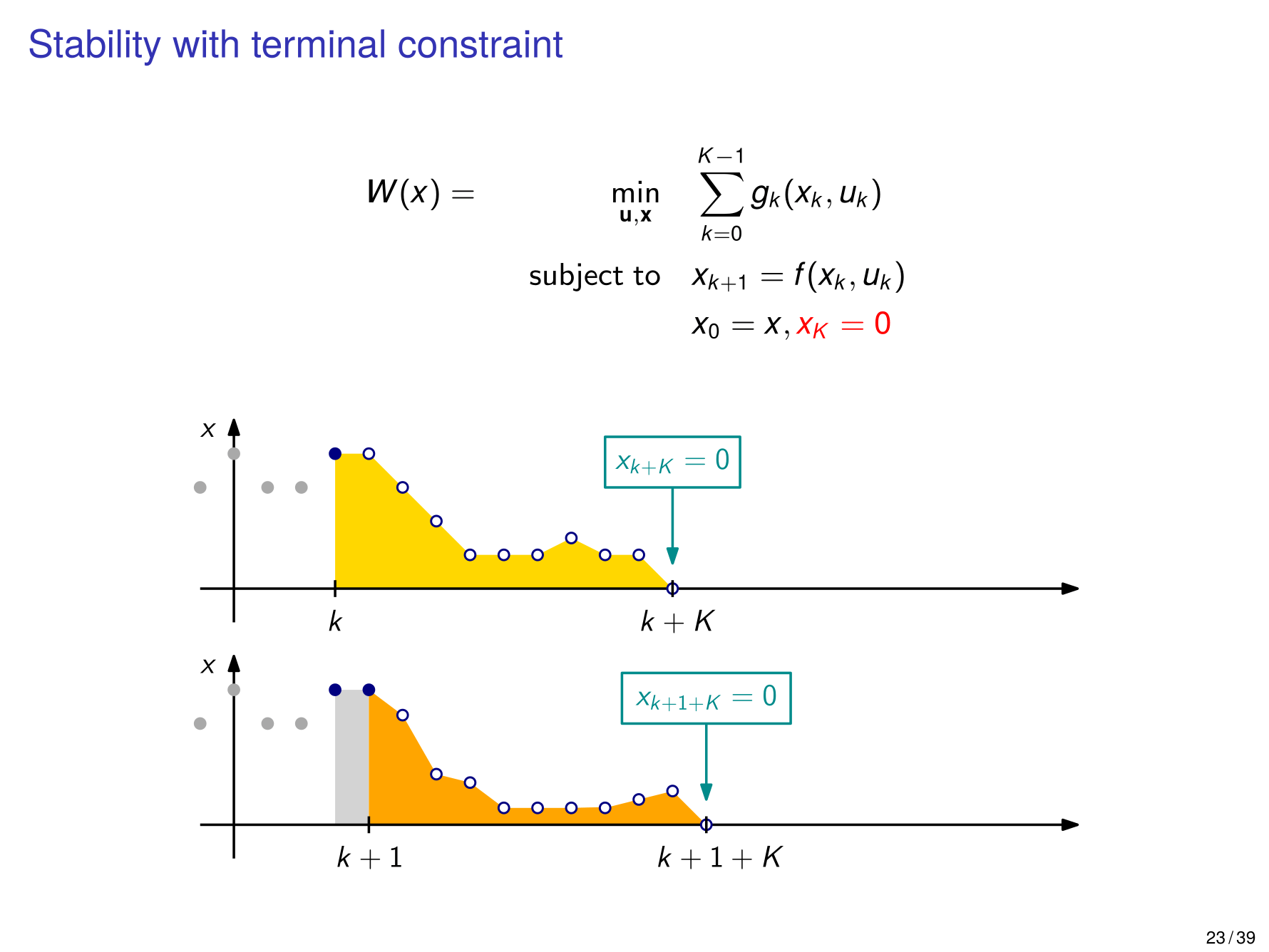
Model Predictive Control
- Receding horizon principle
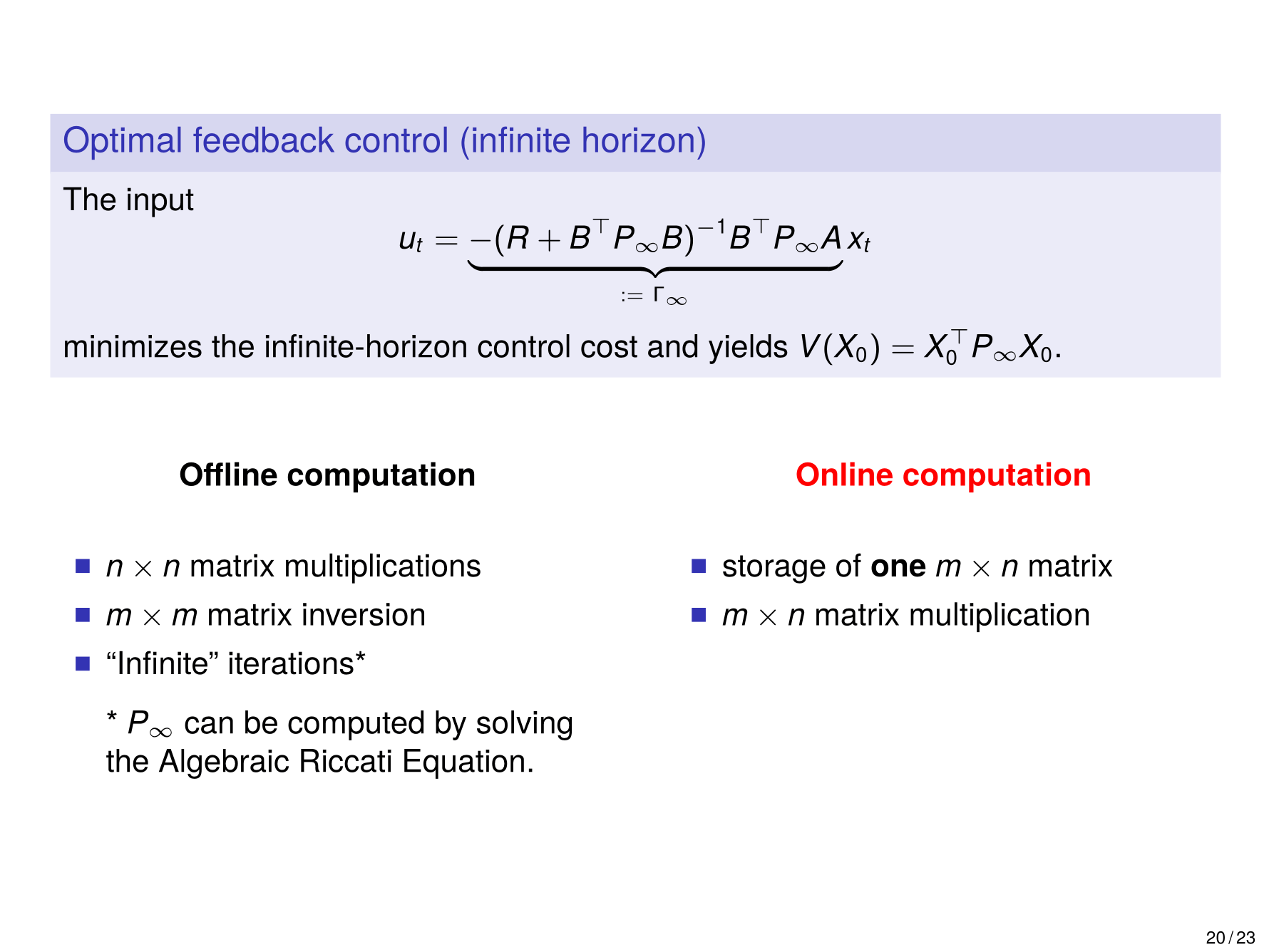
- Online computation and resulting static feedback
- Linear quadratic case + constraints
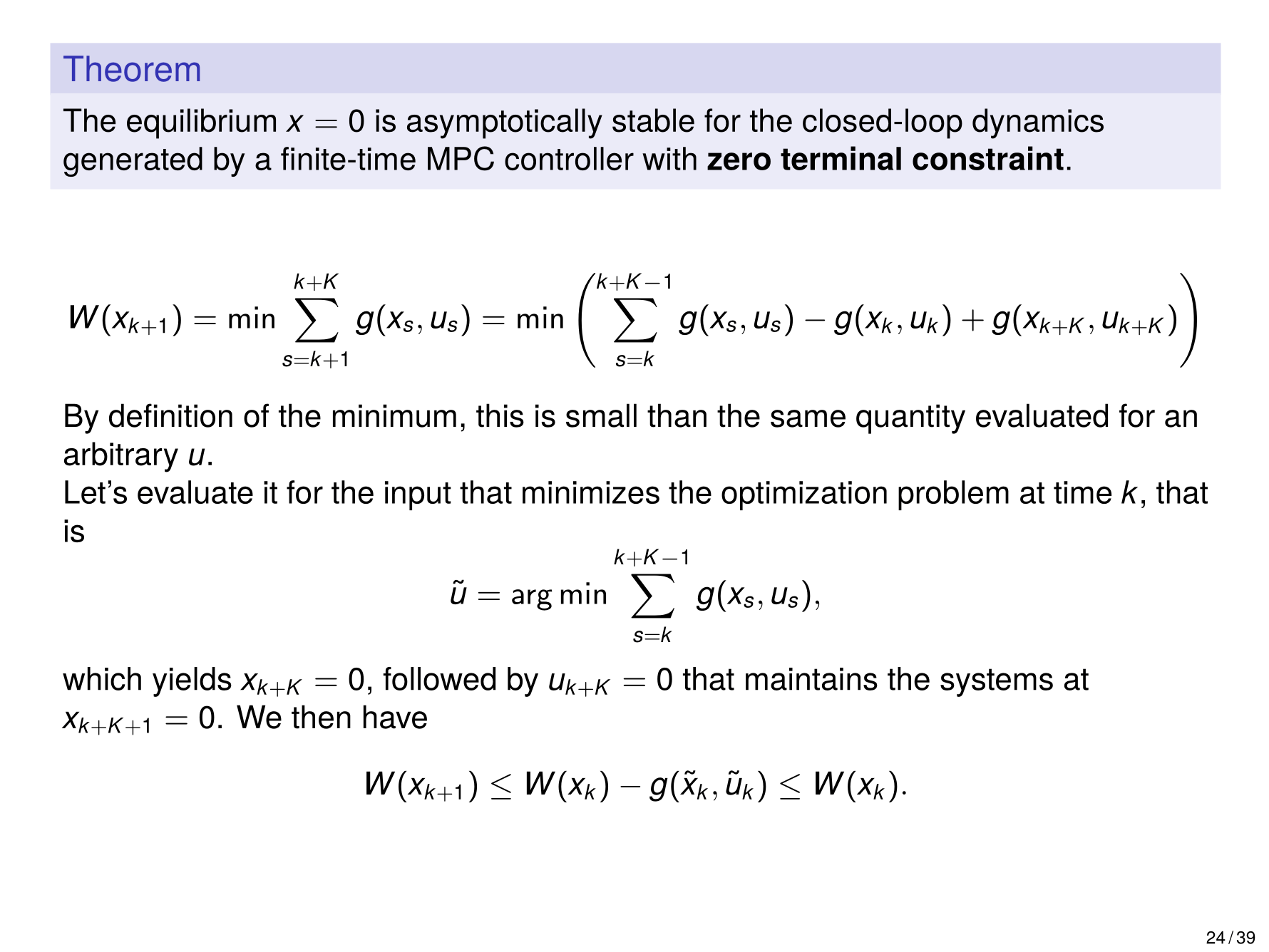
- Closed-loop stability (Lyapunov)
- Steady-state selection, disturbance rejection
Economic MPC
- Economic cost of trajectories
- Average performance guarantees
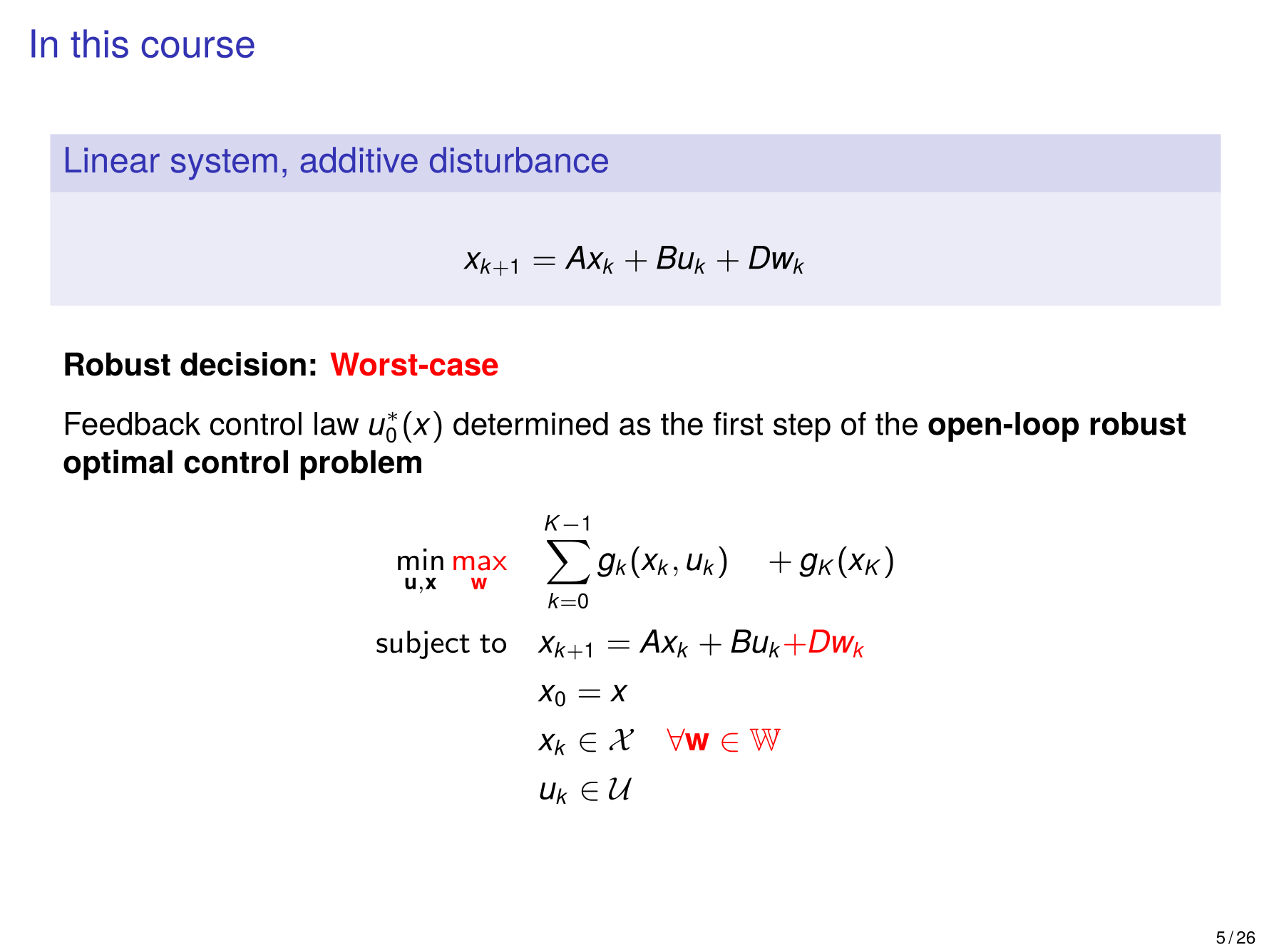
Robust MPC
- Robust satisfaction of constraints
- Closed-form solution for worst-case LQR
- MPC with disturbance feedback
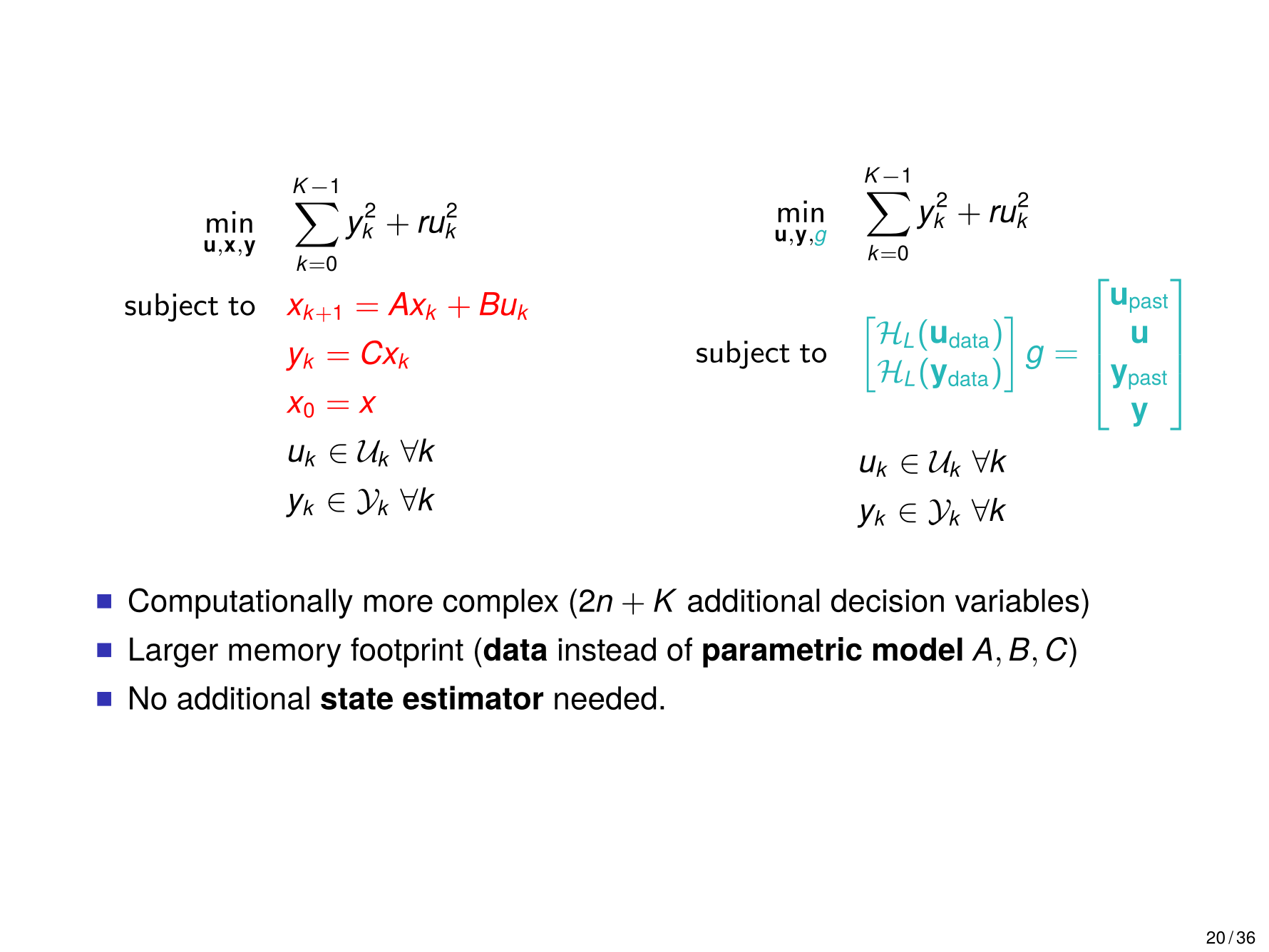
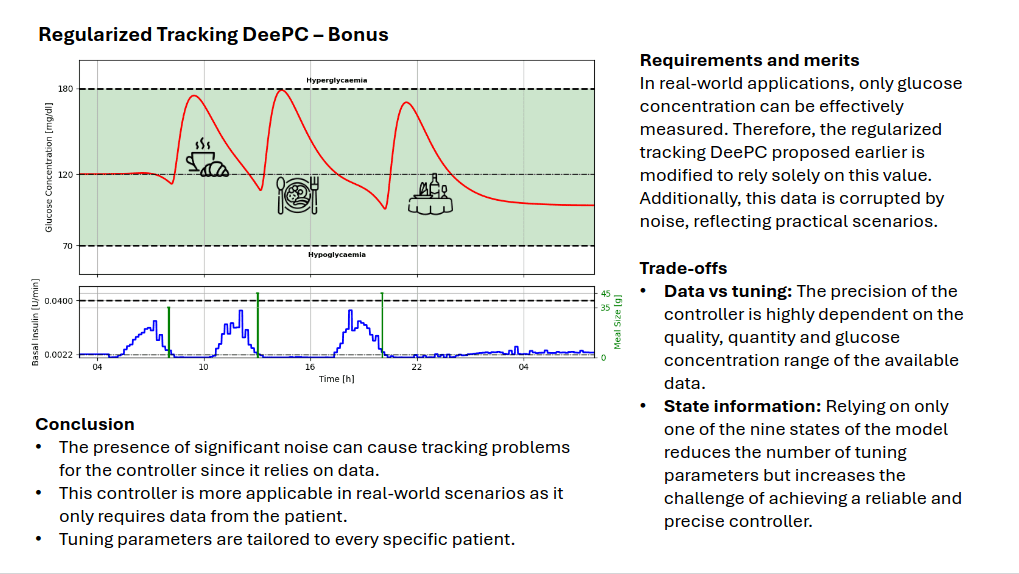
Data-Driven Predictive Control
- State-space identification (Kalman Ho)
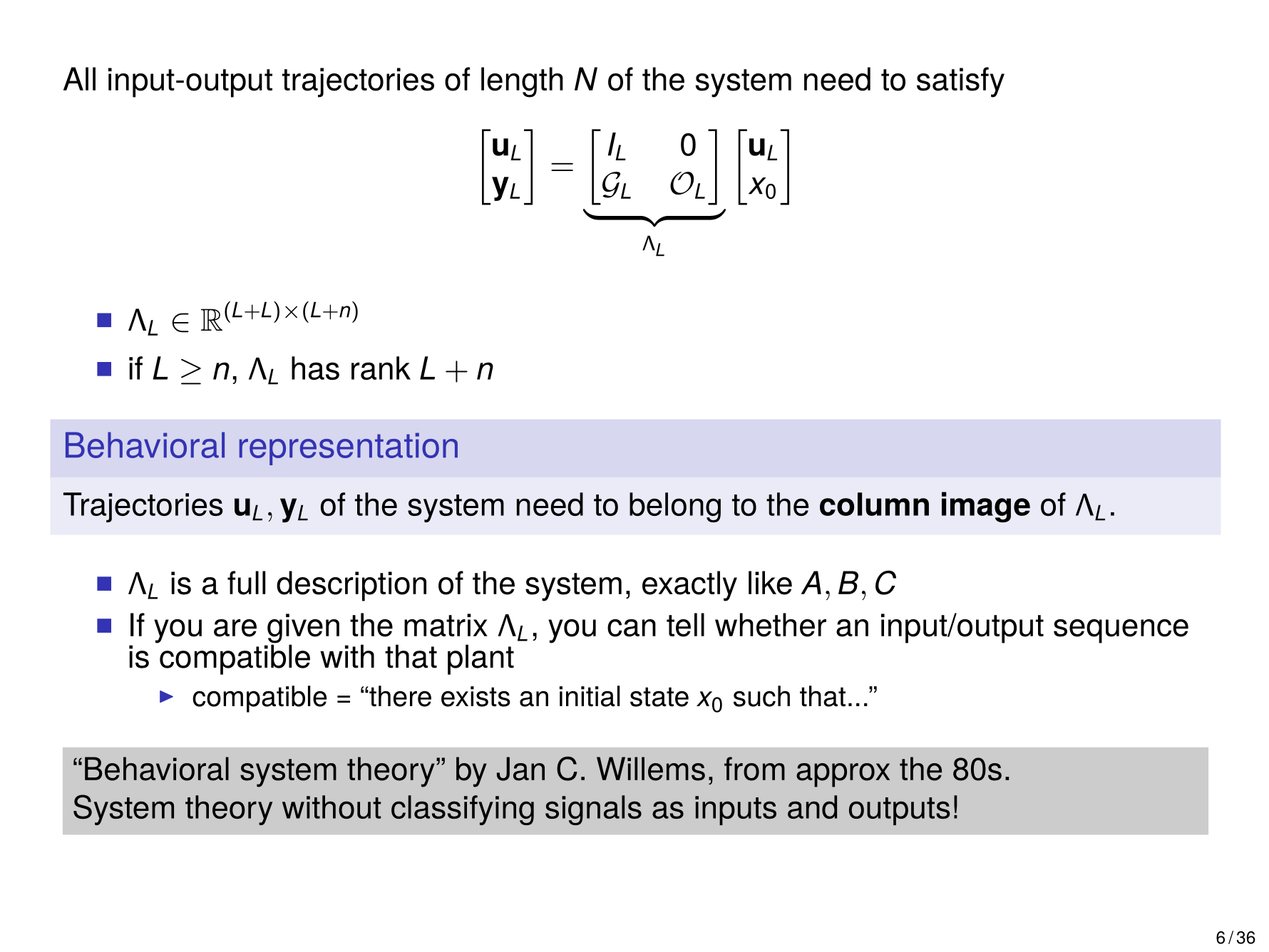
- System trajectories as behavioral representation (LTI)
- Data-Driven Predictive Control vs MPC
- Regularization and noise
Markov Decision Processes
- Dynamic programming on MDPs
- Value iteration and policy iteration algorithms
Monte Carlo Learning
- Q function
- Experimental policy evaluation (episodic)
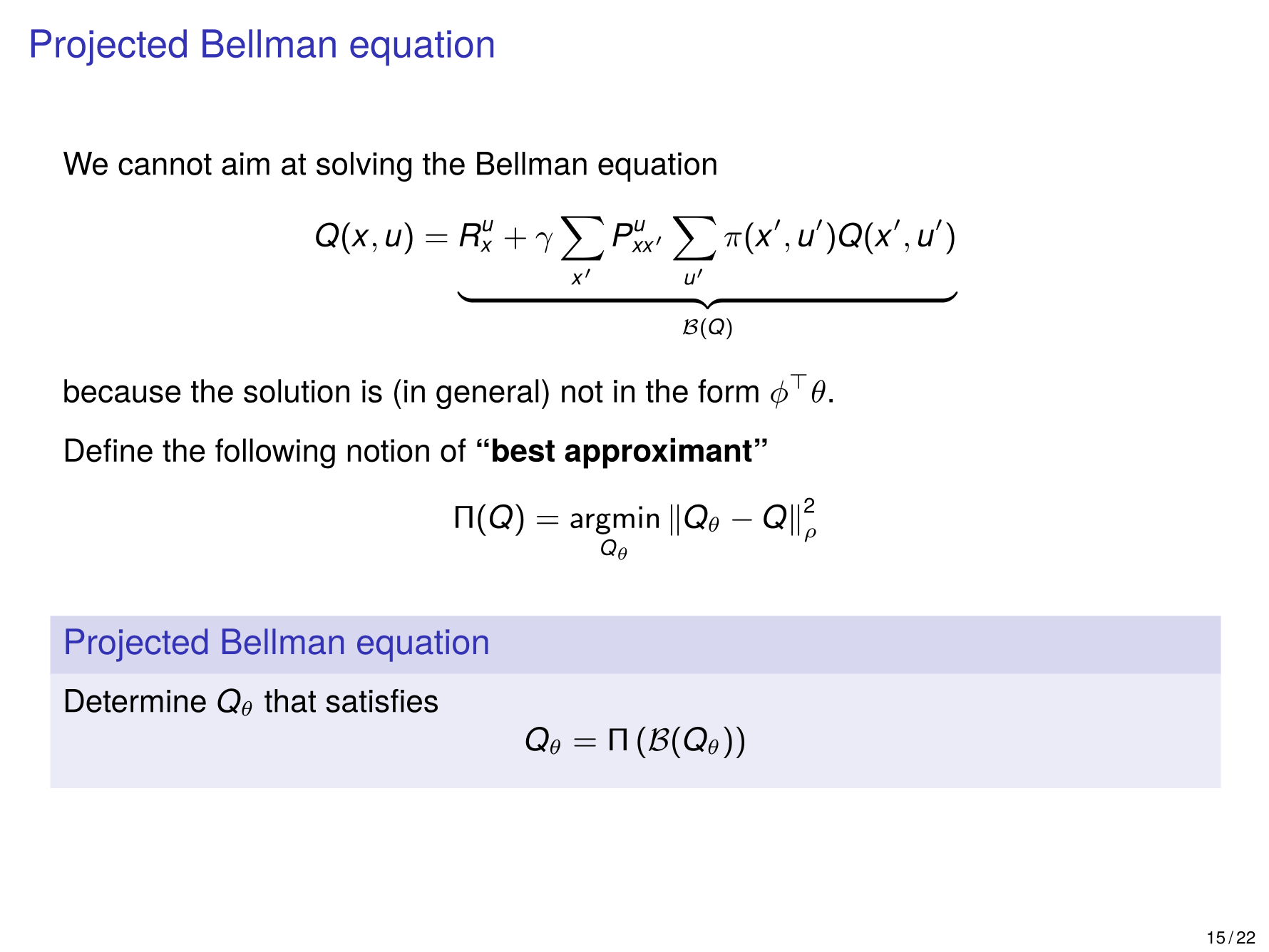
- Approximations: linear approximants
Reinforcement Learning
- Stochastic approximations and stochastic gradient
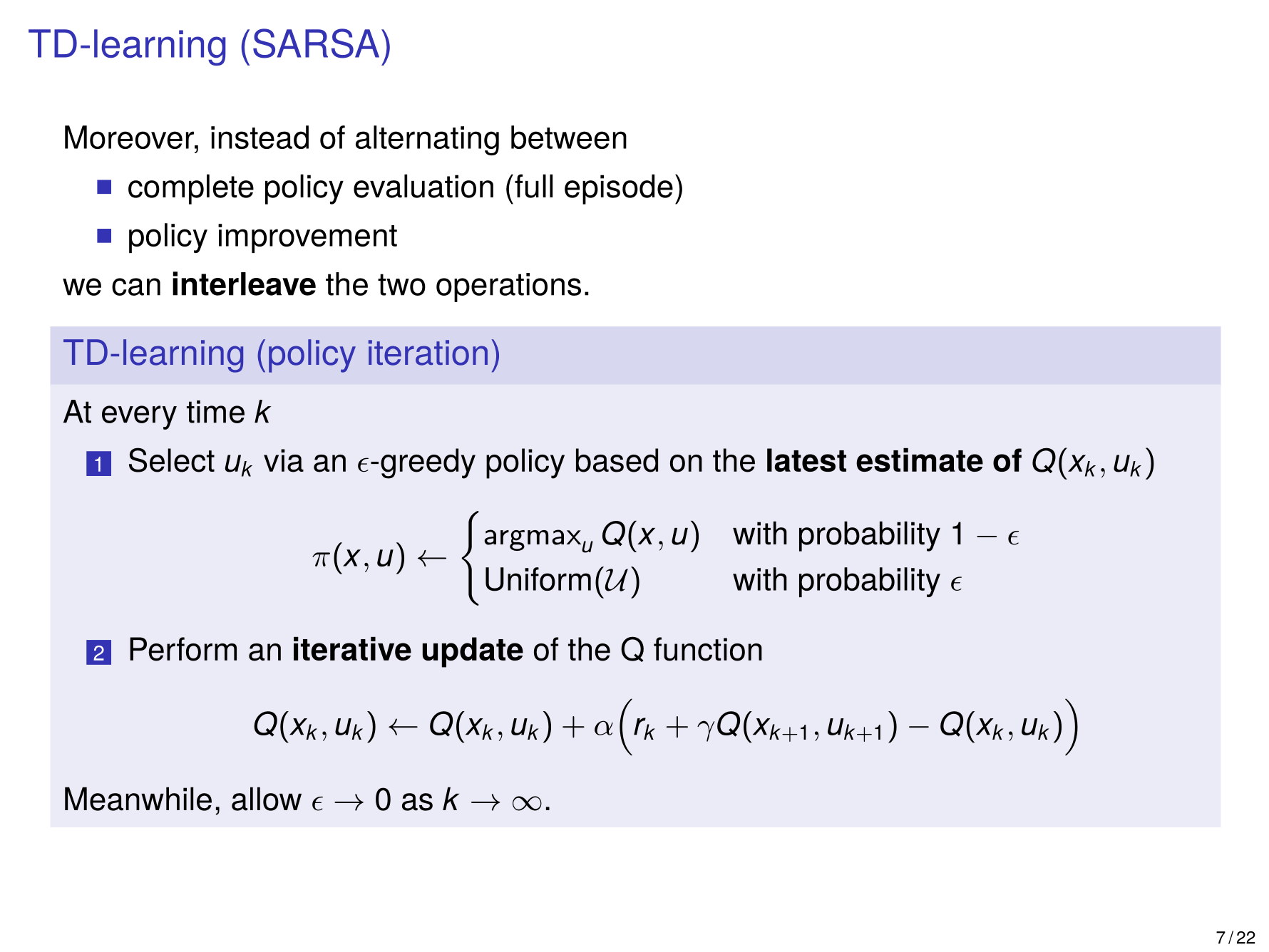
- TD-learning / SARSA
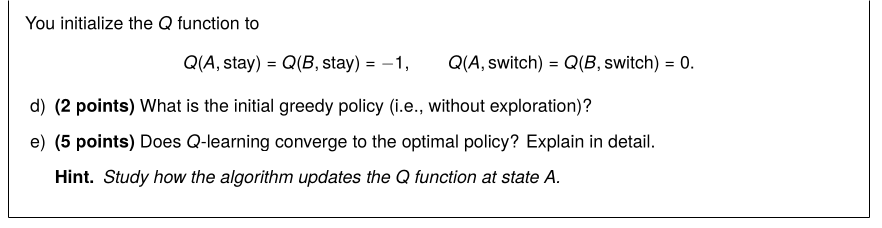
- Q learning
- Policy gradient
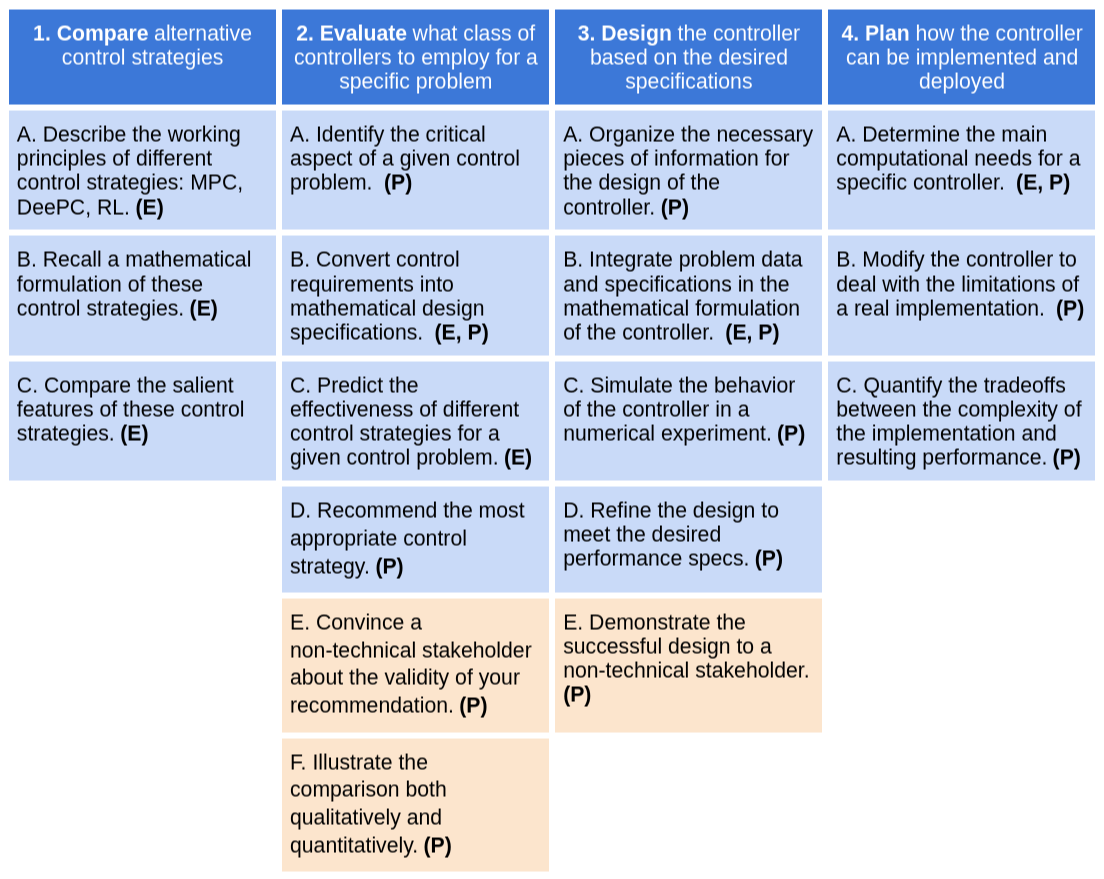
Insight: Design course around competencies, not content
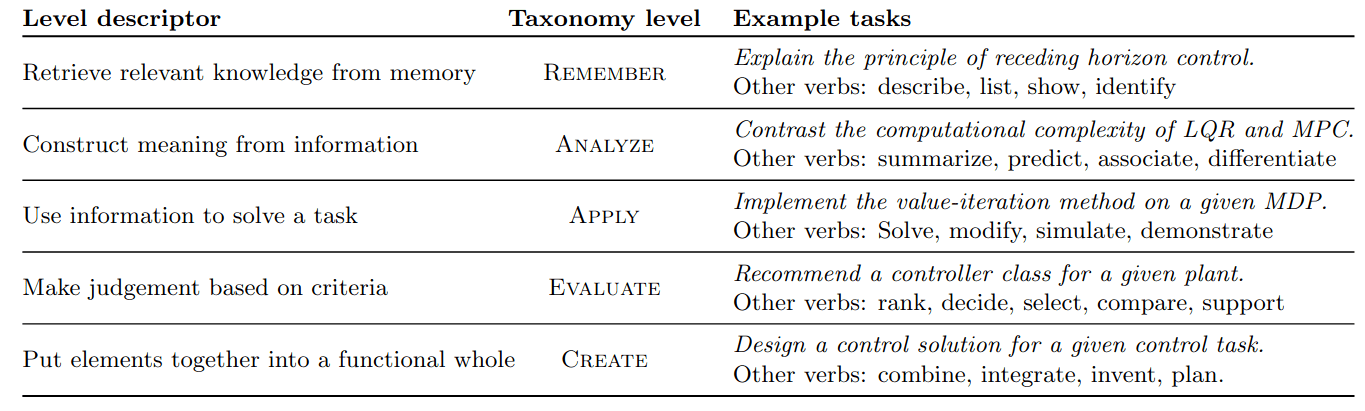
Learning objectives
constructive alignment
of learning activities
with learning objectives
Insight: Train competencies, don't expect them to "appear"
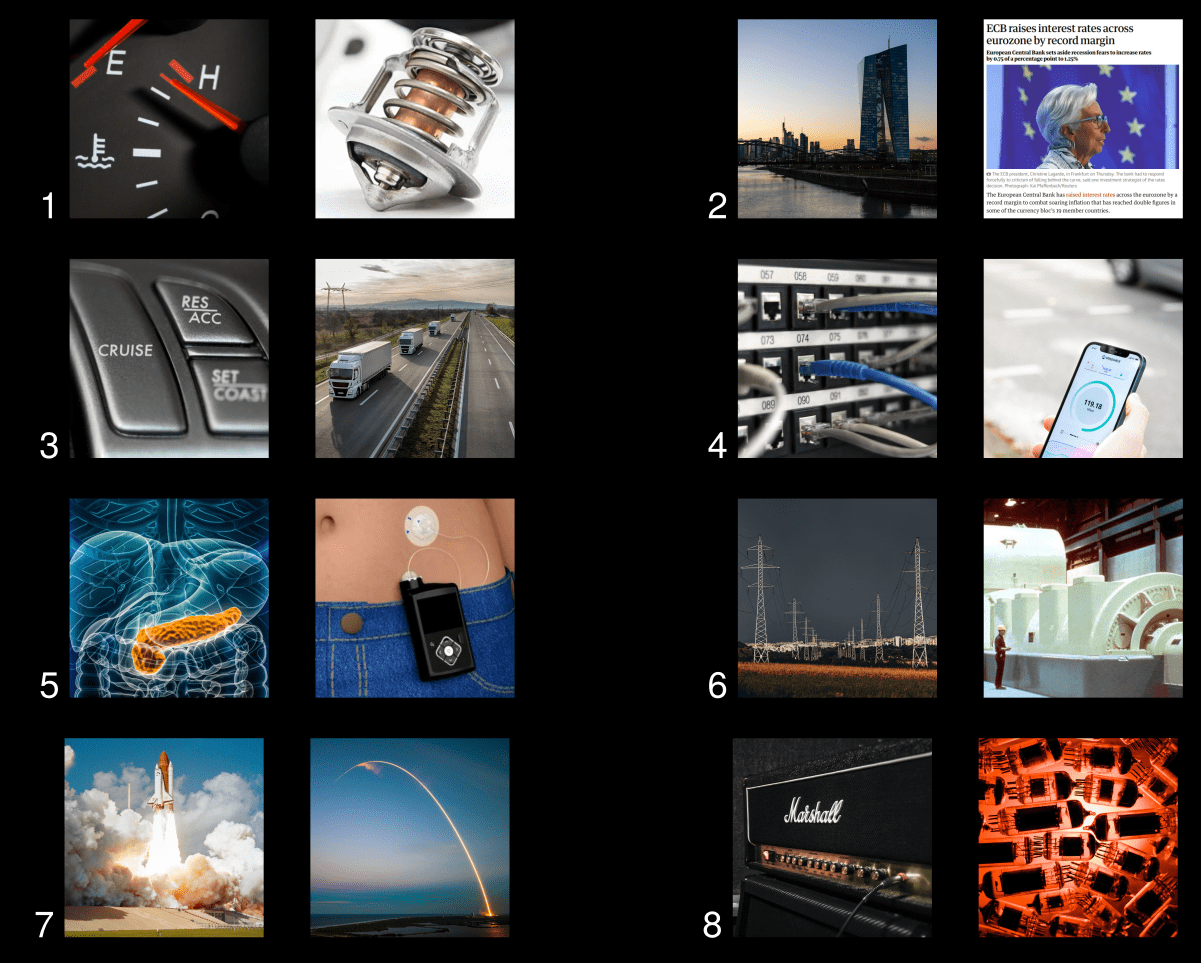
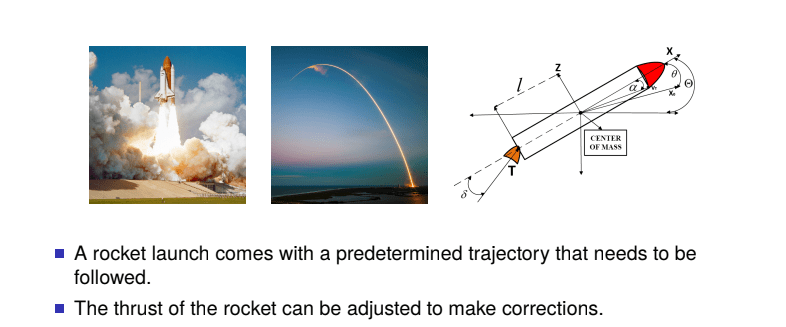
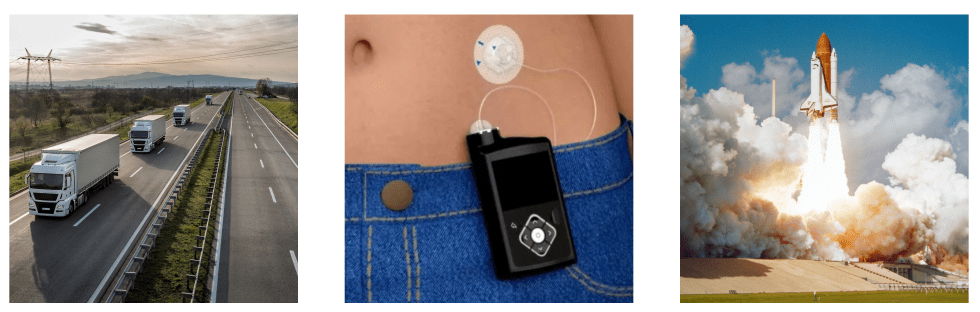
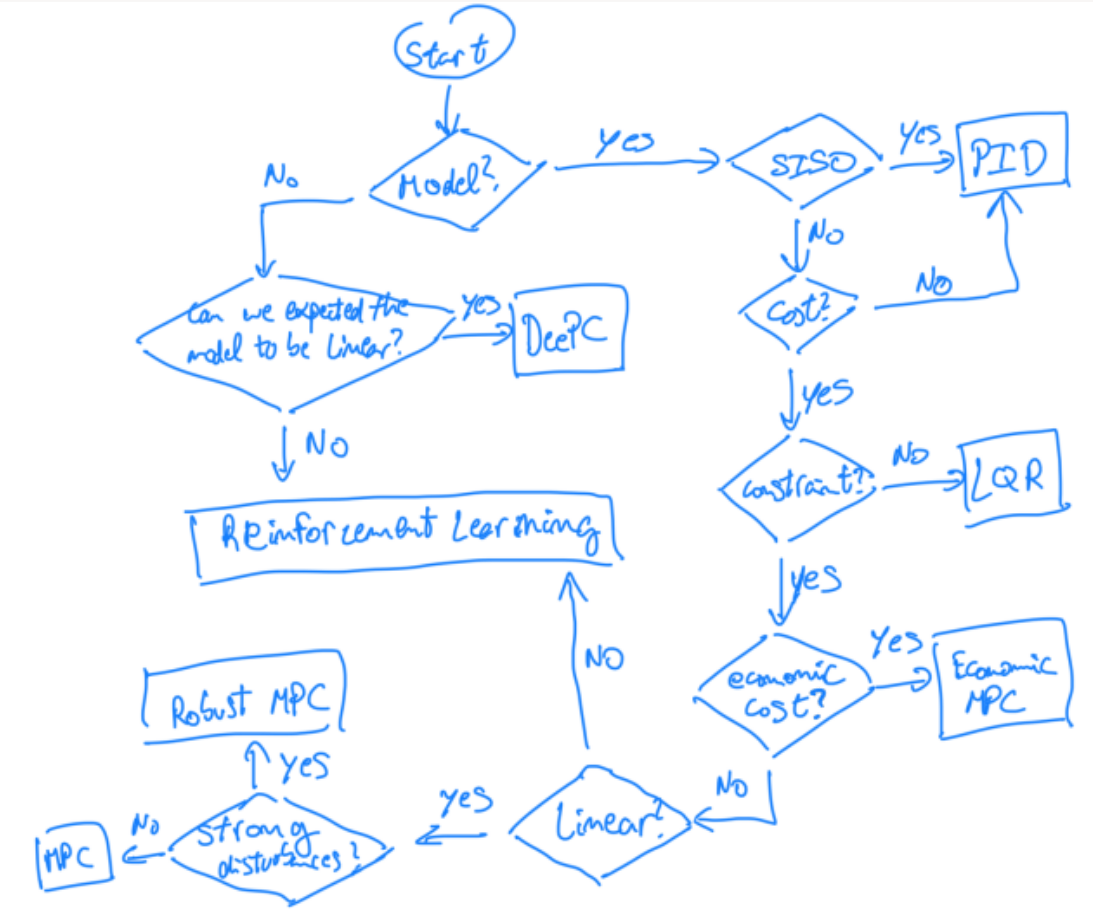
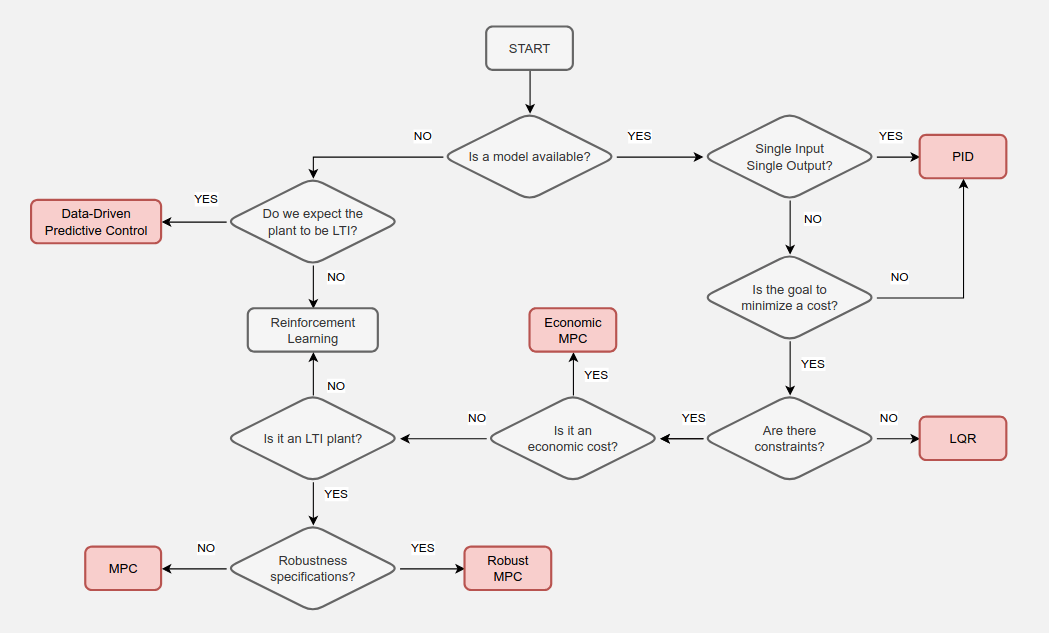
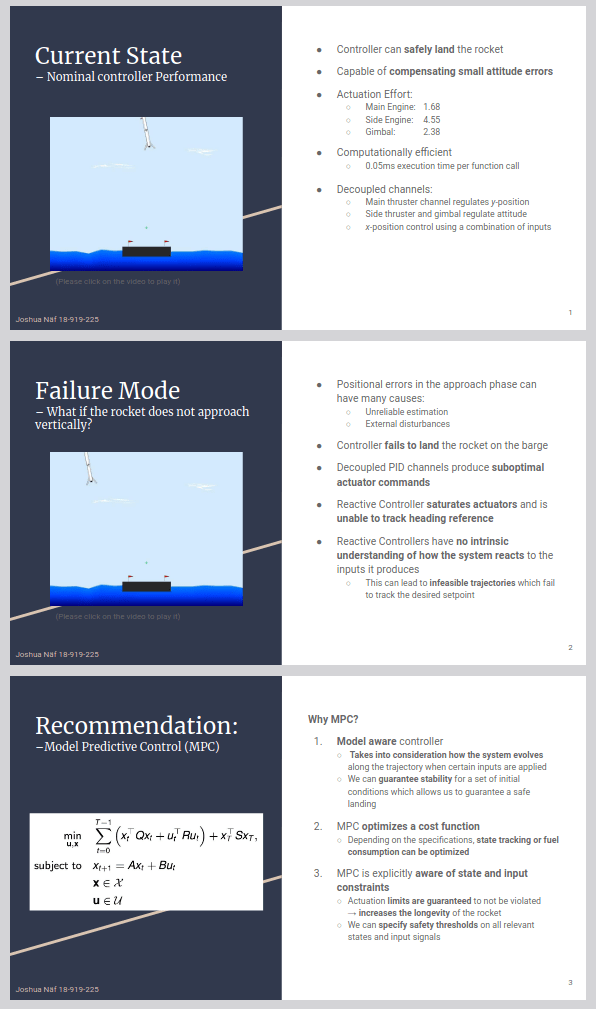
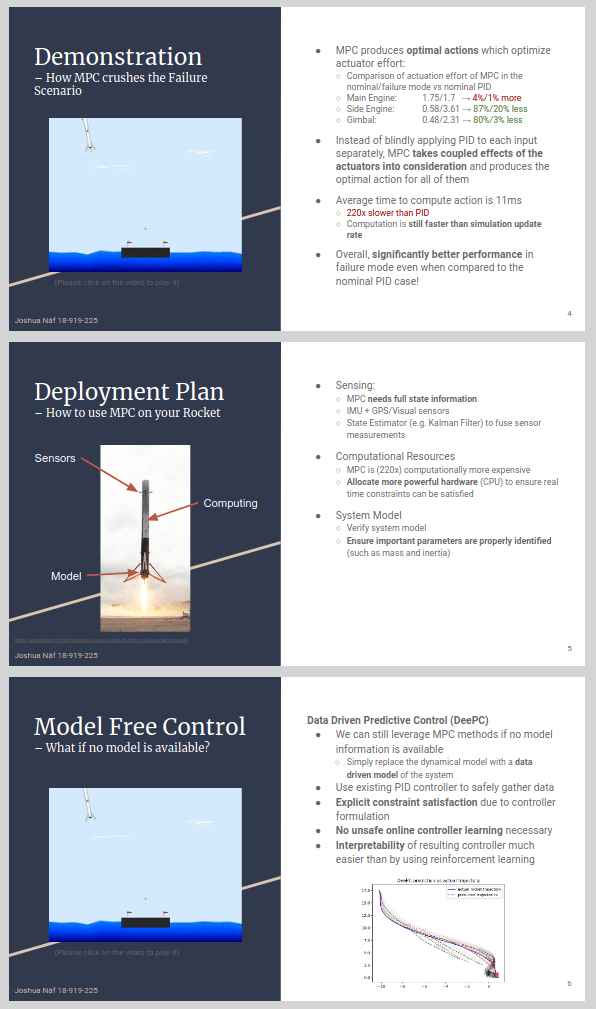
You are a control expert, and you are asked to act as a consultant for an aerospace company. This company wants to hear your opinion on their rocket landing control scheme.
You are provided with
Insight: Back to the promise, treat students as experts
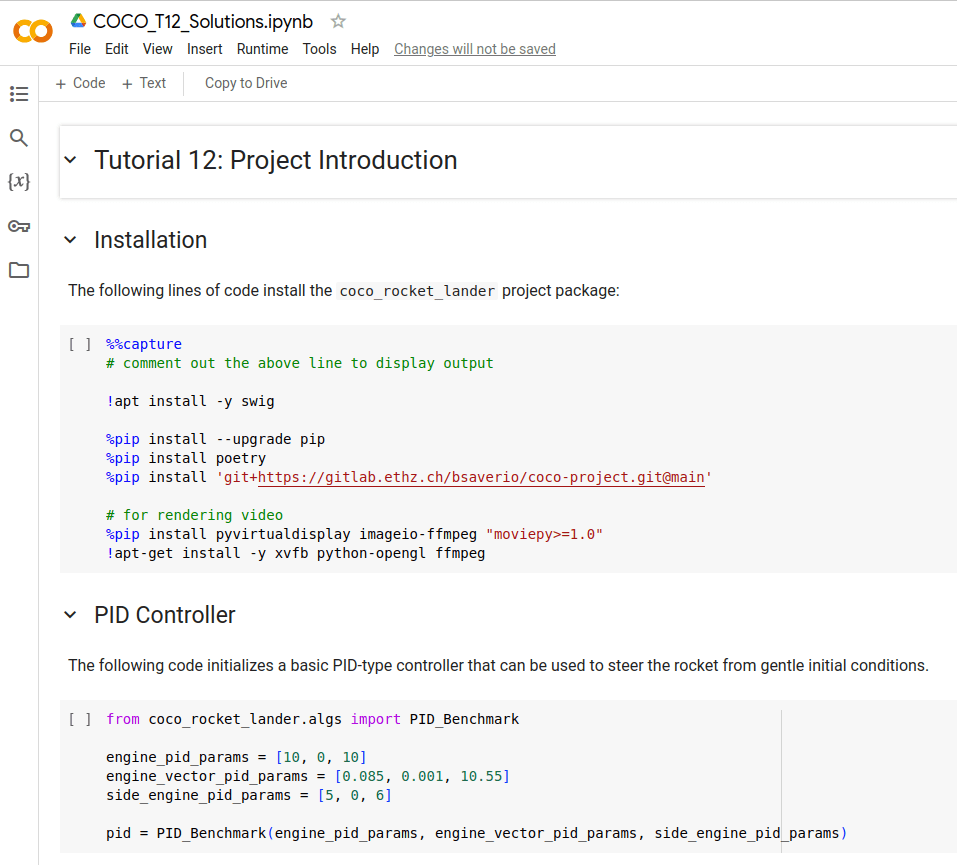
You need to prepare a 5-slide presentation for the company's Chief Technology Officer to explain what type of controller you would recommend and show how it outperforms their current controller in an important failure scenario.
Constructive alignment
You also need to prepare a Jupyter notebook for the company's technical team so that they can understand what you are proposing.
+ public repos
Insight: Plenty of open tools available
Constructive alignment
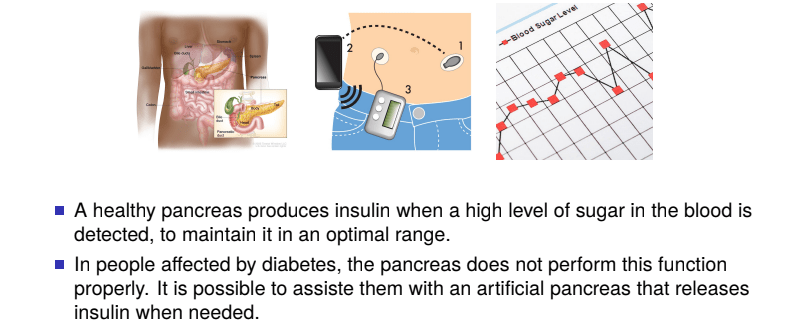
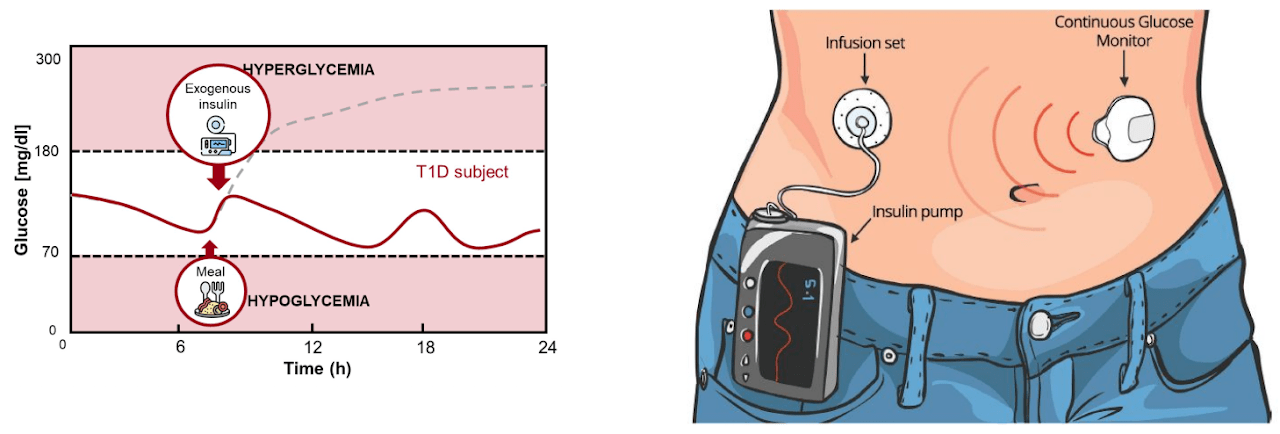
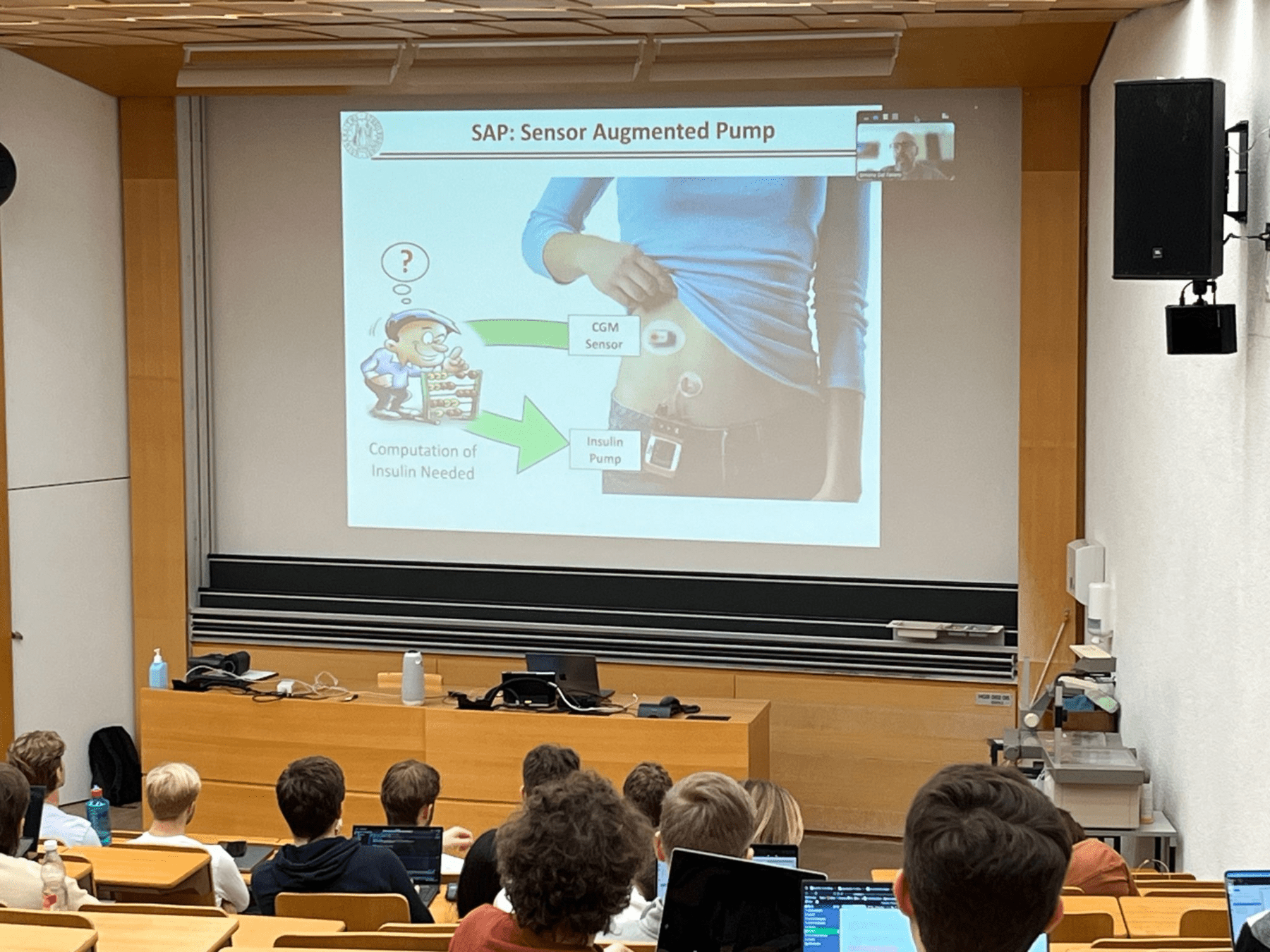
You are a control expert, and you are asked to act as a consultant for InsulinCo, a company that provides artificial pancreas (AP) care to patients with diabetes. Their AP uses an insulin pump to inject insulin in response to glucose measurements and meal predictions. InsulinCo would like to know if an advanced control method can improve the performance of their AP.
InsulinCo has provided you with
Insight: Provide modern control design tools
Behçet Açikmeşe
Professors at U Washington
Past member of NASA's Mars Science Laboratory G&C team
Insight: Treat students with excellent guests and resources
Simone Del Favero
Professors at U Padova
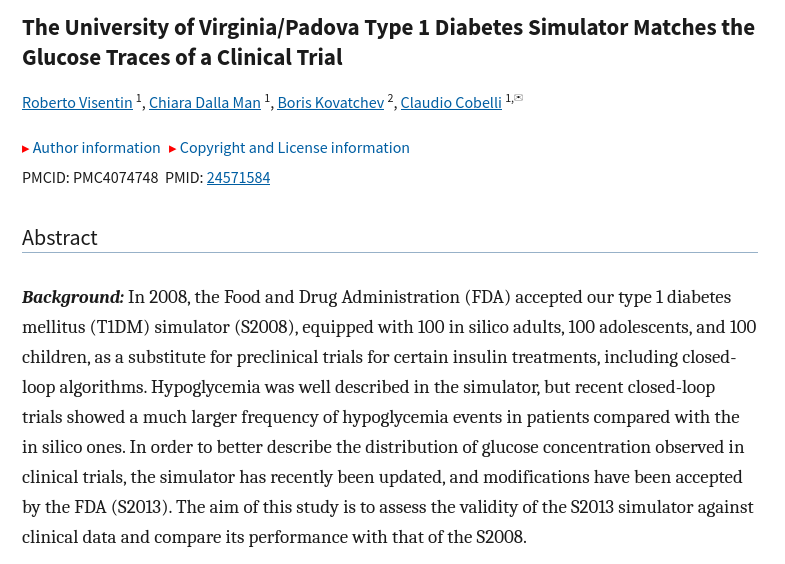
Where the first FDA-approved pancreas simulator was developed
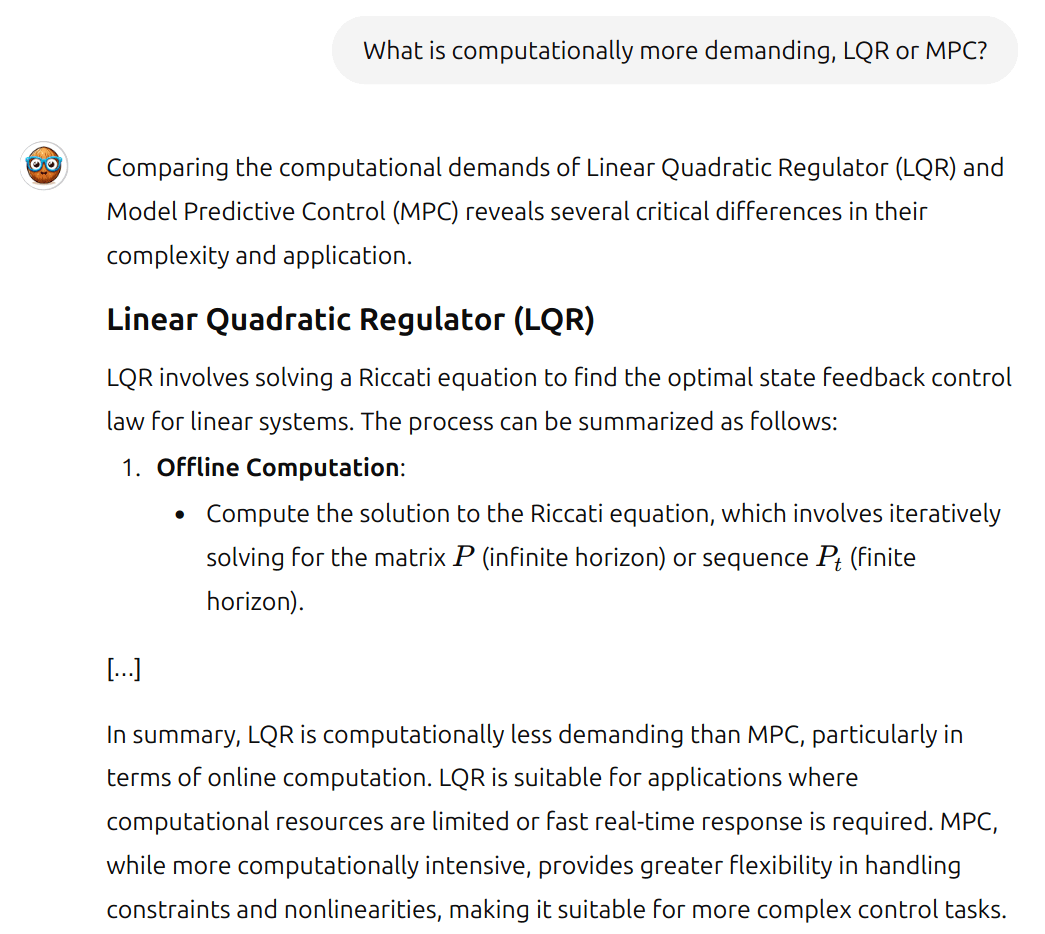
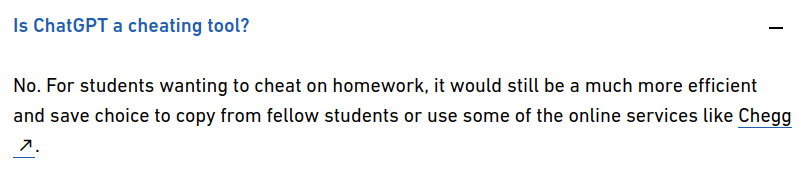
Insight: discuss the role of AI tools for an expert
2023 Golden Owl
teaching award
awarded by the ETH Zurich student association VSETH
Sophie Hall
Nicolas Lanzetti
Alberto Padoan
Keith Moffat
Insight: Bring props. Show students what a controller is.
Insight: Tell the students what kind of experts they will become
Insight: Design course around competencies, not content
Insight: Train competencies, don't expect them to "appear"
Insight: Back to the promise, treat students as experts
Insight: Provide modern control design tools
Insight: Treat students with excellent guests and resources
Insight: discuss the role of AI tools for an expert
Insight: Plenty of open tools available
Insight: discuss the role of AI tools for an expert
Constructive alignment between learning activities, assessment techniques, and learning objectives (competences).
By Saverio Bolognani




