
Saverio Bolognani
Senior Scientist at ETH Zurich
Based on electro-mechanical synchronous generators
Three-phase voltages
Balanced operation
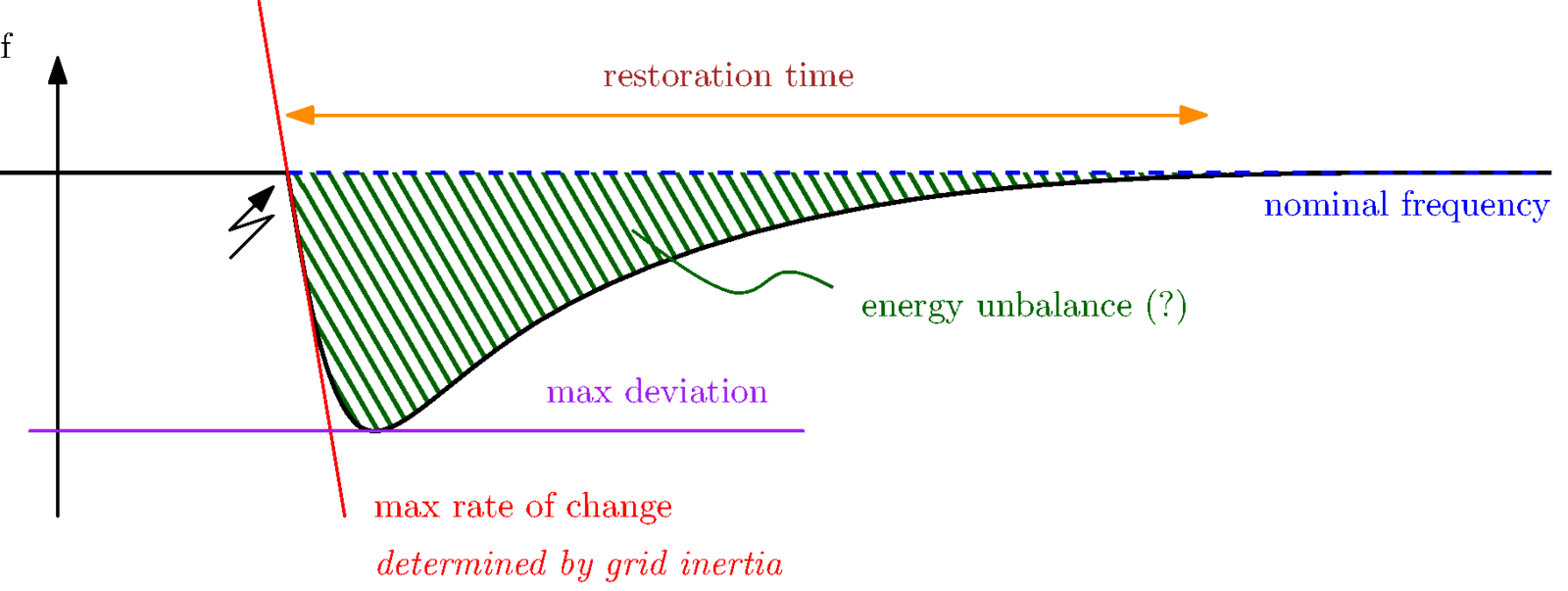
Not very different from step response analysis
of a PID controller (and a nonlinear plant)
P
I
D
By Saverio Bolognani



