Universidade Da Coruña
Análisis de las características de los datos LiDAR y su integración con otras fuentes de datos
Análisis de indicadores Big Geo-Data sobre viarios urbanos para el diseño dinámico de caminos escolares seguros
eo
move
eo
move
g
g
Análisis de las características de los datos LiDAR y su integración con otras fuentes de datos

Análisis de indicadores Big Geo-Data sobre viarios urbanos para el diseño dinámico de caminos escolares seguros
II Workshop en Gestión y Computación de Datos LiDAR
Santiago de Compostela, 27 de Septiembre de 2018
David Fernández Arango, Alberto Varela García y Luigi Pirelli
Caso de estudio:
Licencia CC BY-SA 4.0
Introducción - Objetivos - Área Estudio - Materiales - Método - Resultados
move
g
eo
Estudio dinámico de la movilidad escolar mediante tecnologías web de geolocalización (SPIP2015-01867).
Análisis de indicadores big geo-data sobre viarios urbanos para el diseño dinámico de caminos escolares seguros. (SPIP2017-02340)
move
g
eo
Geomove Fase I:
Geomove Fase II:
Introducción - OBJETIVOS - Área Estudio - Materiales - Método - Resultados
(Díaz Grandío, 2012)
Caracterizar espacios peatonales en áreas urbanas para establecer rutas escolares óptimas

- Integrar diferentes fuentes datos
- Aplicar técnicas de superficie de costes acumulados para cálculo de rutas óptimas
Introducción - OBJETIVOS - Área Estudio - Materiales - Método - Resultados
(Díaz Grandío, 2012)
(Varela García, 2013)
Caracterizar espacios peatonales en áreas urbanas para establecer rutas escolares óptimas

Introducción - Objetivos - ÁREA ESTUDIO - Materiales - Método - Resultados

Introducción - Objetivos - Área Estudio - MATERIALES - Método - Resultados


Introducción - Objetivos - Área Estudio - MATERIALES - Método - Resultados
Introducción - Objetivos - Área Estudio - Materiales - MÉTODO - Resultados





Pendientes
Bordillos
Otros...
Pasos peatones
Obstáculos para sillas ruedas
Obstáculos para peatones
MMCoruna_023_S1.laz + MMCoruna_023_S2.laz
Merge sensor 1 and sensor 2 data
Classify ground and not ground
Filter ground:
* Normal Z filter
* K-Distance filter
* PMF filter
Create MDE
Create Intensity ground raster
Fill empty ground cells by interpolating with neighboring values. txt
Create wheelchair obstacles raster
Wheelchair_obstacles.tif
Introducción - Objetivos - Área Estudio - Materiales - MÉTODO - Resultados
Input: MMCoruna_023_S1.laz

Output: out_1_ground_and_hag.las
- Filtro Outlier-statistical method (emplea media y desviación estándar)
-
Filtro PMF. Segmenta ground / not ground (Zhang, 2003)
-
Escribir fichero
Introducción - Objetivos - Área Estudio - Materiales - MÉTODO - RESULTADOS
Segmentar suelo/no suelo

-
Cargar datos *.laz
-
Seleccionar por NumberOfReturns [1:1]
-
Filtro ELM (Chen, 2012)

Output: out_3_a_normals_filter.las
-
Seleccionar Classification[2:2]
-
Calcular NormalZ (knn=30)
-
Seleccionar normalZ [0:0.6] Classification ->1
-
Seleccionar normalZ ! [0:0.6] Classification ->2
-
Merge suelo / no suelo
-
Escribir fichero
Input: out_2_outlier_filter.las



Filtro Normales Z
Introducción - Objetivos - Área Estudio - Materiales - MÉTODO - RESULTADOS
Normal Z Filter
Output: out_3_b_kdistance_filter.las
Input: out_3_a_normals_filter.las
-
Seleccionar Classification [2:2]
-
KDistance (k=300)
-
Seleccionar puntos KD >1 -> classification = 1
-
Seleccionar puntos KD <1 -> classification = 2
-
Merge puntos suelo / no suelo
- Escribir fichero
Filtro K-Distance
Introducción - Objetivos - Área Estudio - Materiales - MÉTODO - RESULTADOS


Output: out_3_c_PMF_filter.las
Input: out_3_b_KDistance_filter.las
-
Seleccionar Classification [2:2]
-
PMF. Segmentar suelo / no suelo
- Escribir fichero


Progressive Morphological Filter
Introducción - Objetivos - Área Estudio - Materiales - MÉTODO - RESULTADOS
MDE
Introducción - Objetivos - Área Estudio - Materiales - MÉTODO - RESULTADOS
gdal_fillnodata.py -md 12 -b 1 -of GTiff <out_5_Z_heights.tif> <Z_heights_filled.tif>
1- Rellenar celdas del raster mediante gdal.fillnodata
2- Crear una máscara adaptada al área de estudio mediante gdal.translate
gdal_translate -projwin 547284.875 4801507.66 547504.835 4801352.5 -ot Float32 -of GTiff <building_mask.tif> <clipped_extent.tif>
3- Multiplicar Z_heights_filled.tif por clipped_extent.tif para generar un ráster adaptado a la máscara correrspondiente
gdal_calc --calc "A*B" --format GTiff --type Float32 --outfile out_7_Z_height_masked_ground.tif> -A <Z_heights_filled.tif> --A_band 1 -B <clipped_extent.tif> --B_band 1
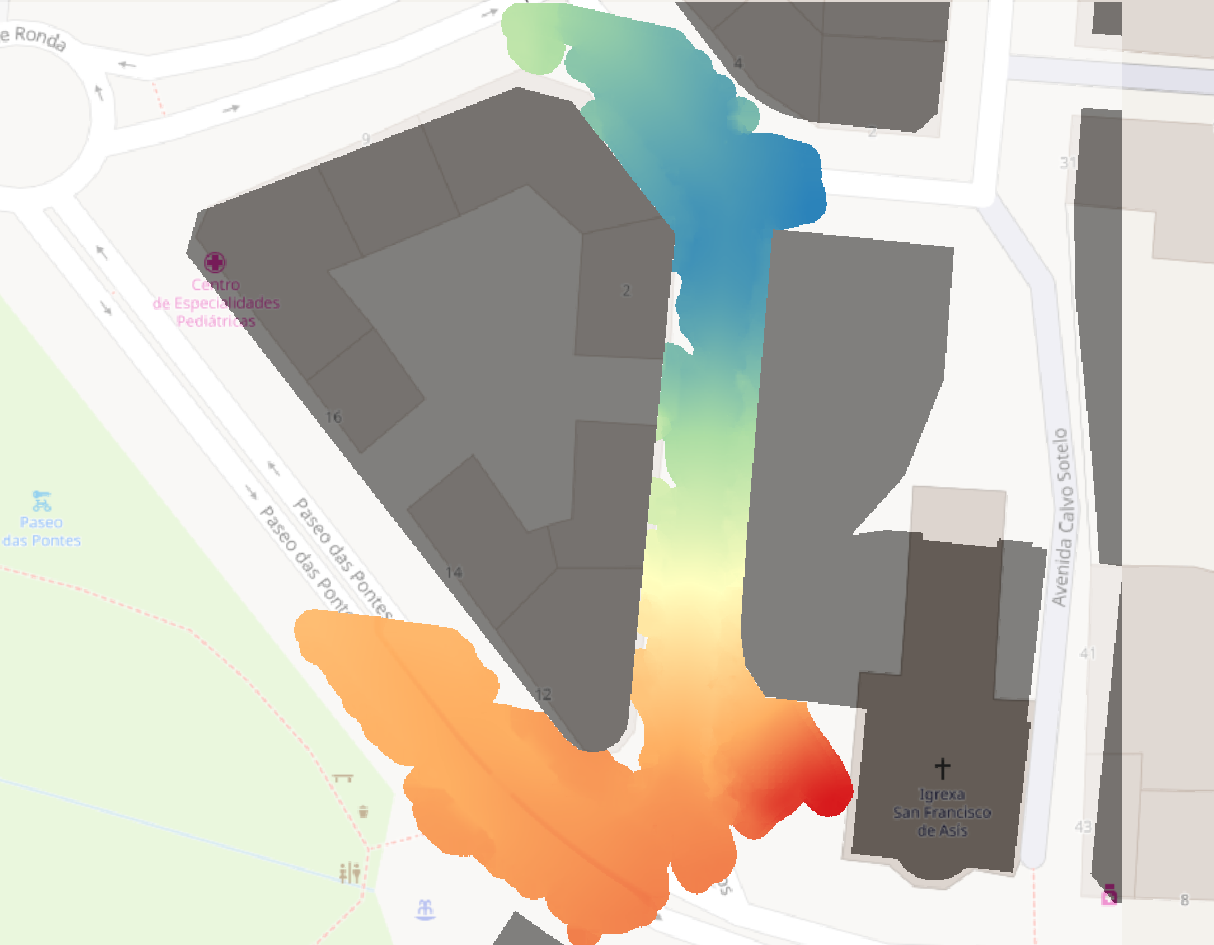
Interpolación - Vecinos más cercanos
Introducción - Objetivos - Área Estudio - Materiales - MÉTODO - RESULTADOS
Calcular HAG
Seleccionar HAG [0.05 : 2.20] -> Clasification = 1
Escribir fichero en GTiff con malla 18cm
-
Cortar tiff con máscara edificaciones
-
gdal_calc --calc "A*B" --format GTiff --type Float32 --outfile <out_10_wheelchair_obstacles_masked.tif> -A <out_8_wheelchair_obstacles_raster.tif> --A_band 1
-B <clipped_extent.tif> --B_band 1
-
Obstáculos para sillas ruedas
Introducción - Objetivos - Área Estudio - Materiales - MÉTODO - RESULTADOS
Otros resultados...
Identificación pasos peatones
Delimitación acera / calzada
Identificación obstáculos para peatones y usuarios de sillas ruedas
Mejoras para QGIS
Problemas encontrados
Empleo adecuado de filtros
Puntos con más de un retorno
Zonas de Sombra
¿Qué queda por hacer?
- Mejorar identificación bordillos y rampas
- Automatizar pipelines en QGIS
- Crear superficies de costes-desplazamiento
- Crear superficie de costes acumulados e identificar caminos óptimos
- Migrar el algoritmo CDC de GvSIG a QGIS
En este proyecto:
En futuras investigaciones:
- Optimizar algoritmos actuales
- Completar zonas sombra:
- Mediante backpack LiDAR
- Mejorando algoritmo interpolación
- Otros sistemas captura datos

Gracias
Geomove II. Análisis de indicadores Big Geo-Data sobre viarios urbanos para el diseño dinámico de caminos escolares seguros
- Alumnos, profesores y demás personal laboral de los centros educativos colaboradores
- Ministerio del Interior
- DGT
- Stop Accidentes
- UDC
- Ferrotrans
- tGIS
- GAC
Universidade Da Coruña
move
g
eo
move
g
eo
Análisis de las características de los datos LiDAR y su integración con otras fuentes de datos by David Fernández Arango, Alberto Varela García and Luigi Pirelli is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

Análisis de las características de los datos LiDAR y su integración con otras fuentes de datos.
By cartolab
Análisis de las características de los datos LiDAR y su integración con otras fuentes de datos.
II Workshop Red Tecnoloxías LiDAR e Información Xeoespacial (TLIX). Santiago de Compostela. 27 Septiembre 2018.




