Manabu Nishiura
UTokyo(PreferredNet, JSK) -> TMC -> TRI -> TMC

One Slide IntroDuction
hobby: cooking, drinking wines, coffees, craft beers, studying robotics, playing the acoustic guitar
iGEM2014 UTokyo team Gold medal, IEEE RAS Humanoids 2021 best oral presentation award (Almost equally contributed)
University of Tokyo, Precision of Engineering -> Graduate School of Interdisciplinary Information Studies
Wonderlab (Mathematical Problem Design, 3D modeling), Preferred Networks (RL bipedal walking, Sim-to-Real), JSK(self-driving by Musculoskeletal Humanoid), TMC(R-frontier Robotics Research), TRI(Punyo, Dexterous Manipulation)
with my wife
@Yushima shrine
Learning-based control, Musculoskeletal Humanoid, Sim-to-Real (Mujoco, Drake), Micro-computer(Arm Cortex-M Series)
One of my momumental moment when our musculoskeletal legs successfully operated for the first time. He has about 50 motors and motor drivers.

Life long goal
- Make robots safe for both people and robots themselves. Both soft hardware and the compliant controller are necessary.
- I want life-assistant robots to fold laundry, clean the bathtub, change the sheets and do other tedious tasks for me at home...
- Housework needed varies from household to household. The ability of robots to learn from people is necessary.
Preferred Networks
- I reimplemented the Deepmind paper results.
https://tech.preferred.jp/ja/blog/replication-of-emergence-of-locomotion-behaviors-in-rich-environment/ - Tackled Sim-to-Real problem in bipedal locomotion of Table-top sized Humanoid. It turned out to be a very tough problem, especially with high-gear ratio motors. My coworker recently published a paper after 4 years(!).
JSK robotics labratory
- I was sooooo happy that many many humanoid robots surrounded me.
- Did research on the learning-based control on musculoskeletal Humanoid.

Technical Detail of My research
-
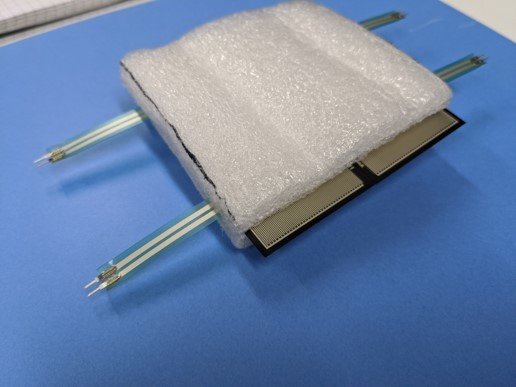
I added a hip-soft sensor to Musculoskeletal Legs(MusashiOLegs).
- FSR + soft-foam
- This enables soft contact- with environments. Most humanoids cannot even sit down on a chair with their own body. (There are motors in hip joints.)



Technical Detail of My research
- Self-supervised learning of dynamics model of highly nonlinear robots. And designed its controller using the learned model.
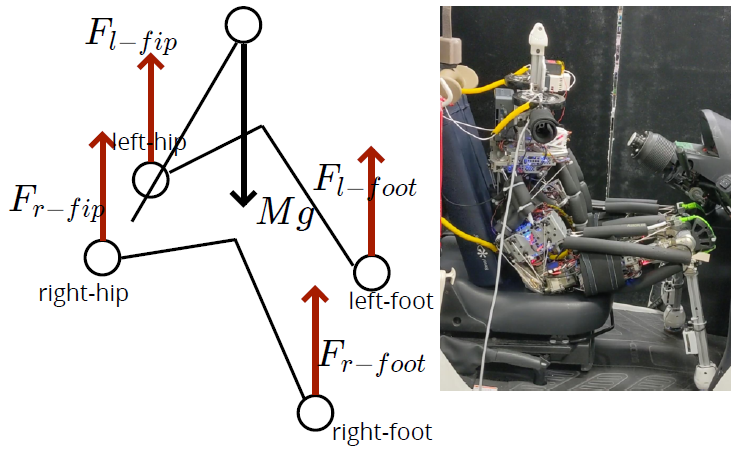
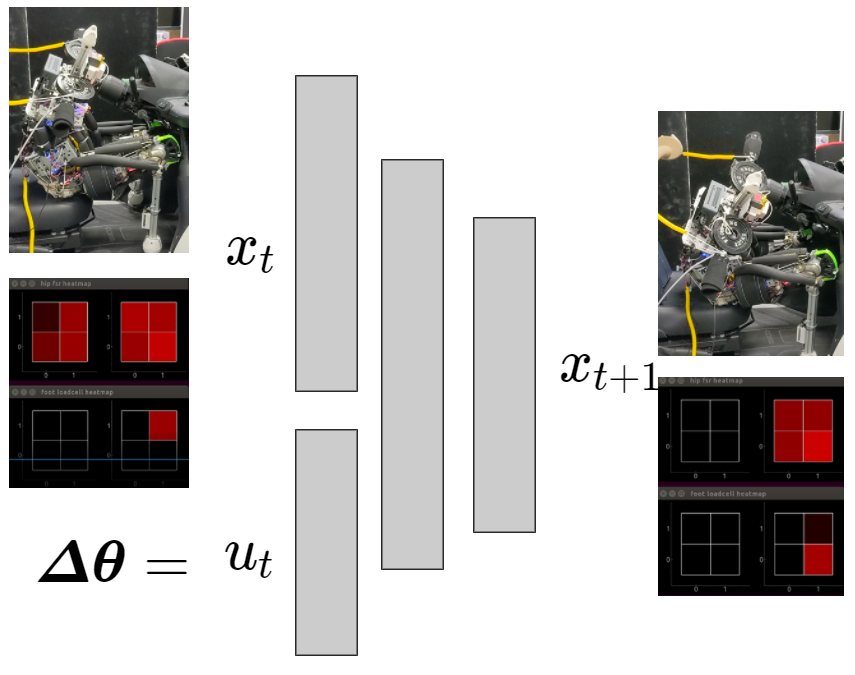
\bm{y}_t = \{\bm{F}_{loadcell},\bm{F}_{hip},\bm{\theta}\}
\bm{u} = \{\Delta\bm{\theta}\}
\bm{y}_{t+1} = f(\bm{x}_t,\bm{u}_t)
\bm{L} = h_{loss}(\bm{y}^{est}, \bm{y}^{ref})\\
\bm{g} = \partial L/\partial \bm{u}^{opt}\\
\bm{u}^{opt} \gets \bm{u}^{opt} - \alpha \bm{g}/\|\bm{g}\|_2
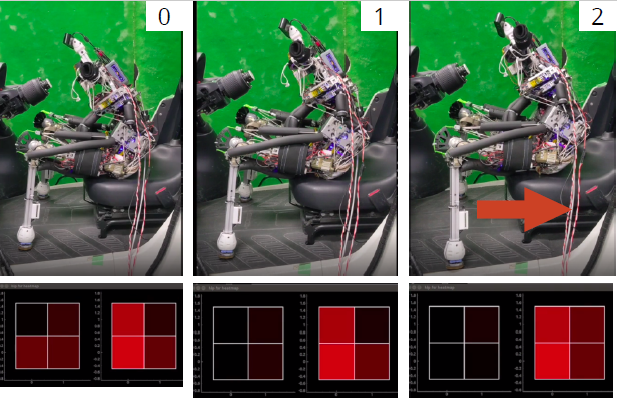
Technical Detail of My research
- Musculoskeletal legs did sit back experiment using learned dynamics model.

TMC R-Frontier
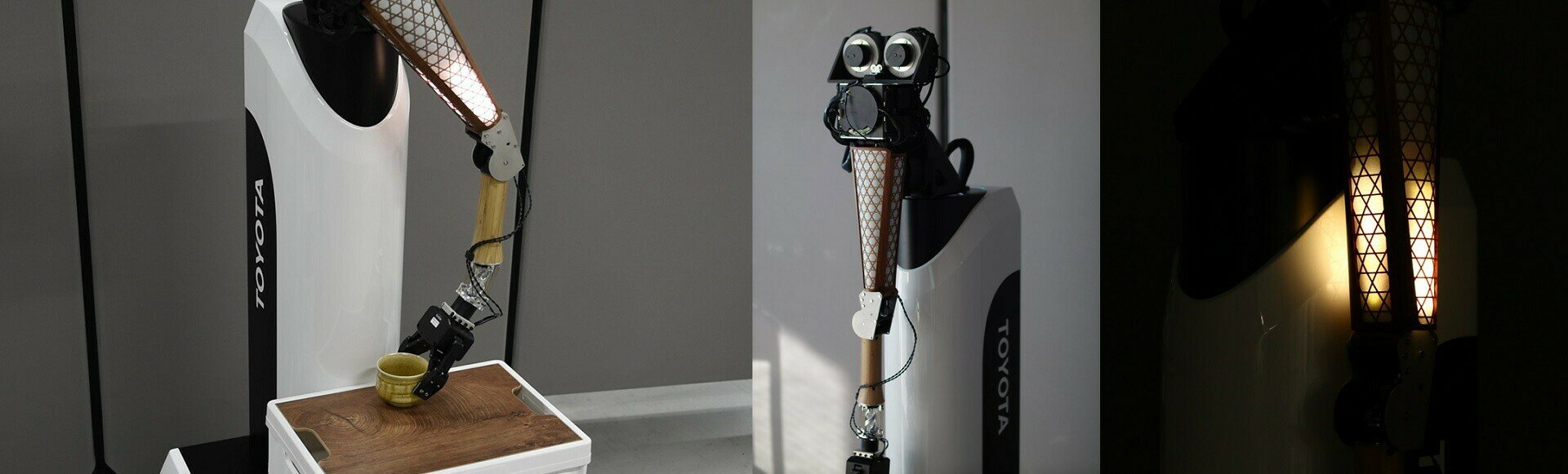
TRI
second dream
- I always dream of a future where I go to a restaurant with my favorite cay, drink my favorite wines, and go back to my home with my favorite car in self-driving mode.
- The Audi skysphere concept was the realization of my dream.


skysphere can transform from a sports car to a luxury car.


Manabu Nishiura - Self-introduction
By Manabu Nishiura

