Group Theory, Irreducible Representations, and Tensor Products
and How to Use them in e3nn to Build Euclidean Neural Networks
Mario Geiger
MRS Fall Meeting Tutorial
This talk is about
- The math of rotations and parity
- Creating and manipulating equivariant functions (polynomials)
Which is useful for- Compute spherical harmonics
- Create invariant polynomials (Thomas and Martin talk)
- Create the linear part of equivariant neural networks
- Non linearities (non-polynomial)
Which is useful for- For the activation functions of the neural networks
intro
polynomials
examples & code
nonlinearities
Polynomial part
- Define properly what is an equivariant polynomial
- Give the tools to create them
Examples and Code
- Spherical Harmonics
- Tensor Product with weights (cornerstone of e3nn)
- Decomposition of Cartesian Tensors
Nonlinearities
- Gates
intro
polynomials
examples & code
nonlinearities
intro
polynomials
examples & code
nonlinearities
Group and Representations
intro
polynomials
examples & code
nonlinearities
Group and Representations
"what are the operations"
"how they compose"
intro
polynomials
examples & code
nonlinearities
Group and Representations
"what are the operations"
"how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group and Representations
"what are the operations"
"how they compose"
"vector spaces on which the action of the group is defined"
rotations, parity, (translations)
scalars, vectors, pseudovectors, ...
intro
polynomials
examples & code
nonlinearities
Group and Representations
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Representation \(D(g, x)\)
- \(g\in G\), \(x \in V\)
- Linear \(D(g, x+y) = D(g,x) + D(g,y) \)
- Follow the structure of the group
\(D(gh,x) = D(g, D(h,x))\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Representation \(D(g, x)\)
- \(g\in G\), \(x \in V\)
- Linear \(D(g, x+y) = D(g,x) + D(g,y) \)
- Follow the structure of the group
\(D(gh,x) = D(g, D(h,x))\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Representation \(D(g, x)\)
- \(g\in G\), \(x \in V\)
- Linear \(D(g, x+y) = D(g,x) + D(g,y) \)
- Follow the structure of the group
\(D(gh,x) = D(g, D(h,x))\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Representation \(D(g, x)\)
- \(g\in G\), \(x \in V\)
- Linear \(D(g, x+y) = D(g,x) + D(g,y) \)
- Follow the structure of the group
\(D(gh,x) = D(g, D(h,x))\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Representation \(D(g, x)\)
- \(g\in G\), \(x \in V\)
- Linear \(D(g, x+y) = D(g,x) + D(g,y) \)
- Follow the structure of the group
\(D(gh,x) = D(g, D(h,x))\)
Equivalent notation \(D(g) x\)
- \(D(g) : V\to V\)
- \(D(g) \in \mathbb{R}^{d\times d}\)
- \(D(gh) = D(g) D(h)\)
⚠️ We use this notation in the code
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Representation \(D(g, x)\)
- \(g\in G\), \(x \in V\)
- Linear \(D(g, x+y) = D(g,x) + D(g,y) \)
- Follow the structure of the group
\(D(gh,x) = D(g, D(h,x))\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
Equivalent notation \(D(g) x\)
- \(D(g) : V\to V\)
- \(D(g) \in \mathbb{R}^{d\times d}\)
- \(D(gh) = D(g) D(h)\)
⚠️ We use this notation in the code
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Representation \(D(g, x)\)
- \(g\in G\), \(x \in V\)
- Linear \(D(g, x+y) = D(g,x) + D(g,y) \)
- Follow the structure of the group
\(D(gh,x) = D(g, D(h,x))\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
Equivalent notation \(D(g) x\)
- \(D(g) : V\to V\)
- \(D(g) \in \mathbb{R}^{d\times d}\)
- \(D(gh) = D(g) D(h)\)
⚠️ We use this notation in the code
intro
polynomials
examples & code
nonlinearities
Group \(G\)
- \(\text{identity} \in G\)
- stability \(g h \in G\)
- inverse \(g^{-1} \in G\)
Representation \(D(g, x)\)
- \(g\in G\), \(x \in V\)
- Linear \(D(g, x+y) = D(g,x) + D(g,y) \)
- Follow the structure of the group
\(D(gh,x) = D(g, D(h,x))\)
Group and Representations
"what are the operations" "how they compose"
"vector spaces on which the action of the group is defined"
Equivalent notation \(D(g) x\)
- \(D(g) : V\to V\)
- \(D(g) \in \mathbb{R}^{d\times d}\)
- \(D(gh) = D(g) D(h)\)
⚠️ We use this notation in the code
intro
polynomials
examples & code
nonlinearities
Examples of representations
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
Representations are like data types
It tells you how to interpret the data...
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
Knowing that \(a_1, a_2, a_3\) are scalars tells you that they are not affected by a rotation of your system
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
If the system is rotated, the 3 components of the vector change together!
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
a vector
The two vectors transforms indepentently
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
a vector
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
system rotated by \(g\)
\(D(g)\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
a vector
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
system rotated by \(g\)
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)

intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
a vector
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
system rotated by \(g\)
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)

intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
a vector
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
system rotated by \(g\)
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
a vector
Representations are like data types
It tells you how to interpret the data with respect to the \(G\)!
system rotated by \(g\)
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)
intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
a vector
system rotated by \(g\)
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)
e3nn notation:
irreps = "3x0e + 2x1o"intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
a vector
system rotated by \(g\)
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)
e3nn notation:
from e3nn import o3
irreps = o3.Irreps("3x0e + 2x1o")intro
polynomials
examples & code
nonlinearities
Examples of representations
3 scalars
a vector
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\in \mathbb{R}^9\)
a vector
system rotated by \(g\)
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)
from e3nn import o3
irreps = o3.Irreps("3x0e + 2x1o")
import torch
alpha, beta, gamma = torch.randn(3)
irreps.D_from_angles(alpha, beta, gamma)intro
polynomials
examples & code
nonlinearities
Examples of representations
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)
system rotated by \(g\)
\(\begin{bmatrix} a^1\\a^2\\a^3\\a^4\\a^5\\a^6\\a^7\\a^8\\a^9\end{bmatrix}\)
array([[ 1. , 0. , 0. , 0. , 0. , 0. , 0. , 0. , 0. ],
[ 0. , 1. , 0. , 0. , 0. , 0. , 0. , 0. , 0. ],
[ 0. , 0. , 1. , 0. , 0. , 0. , 0. , 0. , 0. ],
[ 0. , 0. , 0. , 0.77, 0.22, -0.6 , 0. , 0. , 0. ],
[ 0. , 0. , 0. , -0.1 , 0.97, 0.23, 0. , 0. , 0. ],
[ 0. , 0. , 0. , 0.63, -0.12, 0.76, 0. , 0. , 0. ],
[ 0. , 0. , 0. , 0. , 0. , 0. , 0.77, 0.22, -0.6 ],
[ 0. , 0. , 0. , 0. , 0. , 0. , -0.1 , 0.97, 0.23],
[ 0. , 0. , 0. , 0. , 0. , 0. , 0.63, -0.12, 0.76]],
dtype=float32)
from e3nn import o3
irreps = o3.Irreps("3x0e + 2x1o")
import torch
alpha, beta, gamma = torch.randn(3)
irreps.D_from_angles(alpha, beta, gamma)intro
polynomials
examples & code
nonlinearities
Equivariance
\(V\)
\(V'\)
intro
polynomials
examples & code
nonlinearities
Equivariance
\(V\)
\(V'\)
\(D(g)\)
\(D'(g)\)
\(V\)
\(V'\)
intro
polynomials
examples & code
nonlinearities
Equivariance
\(V\)
\(V'\)
\(D(g)\)
\(D'(g)\)
\(V\)
\(V'\)
\(f\)
intro
polynomials
examples & code
nonlinearities
Equivariance
\(V\)
\(V'\)
\(D(g)\)
\(D'(g)\)
\(V\)
\(V'\)
\(f\)
\(f\)
intro
polynomials
examples & code
nonlinearities
Equivariance
\(V\)
\(V'\)
\(D(g)\)
\(D'(g)\)
\(V\)
\(V'\)
\(f\)
\(f\)
\(f(D(g) x)\)
intro
polynomials
examples & code
nonlinearities
Equivariance
\(V\)
\(V'\)
\(D(g)\)
\(D'(g)\)
\(V\)
\(V'\)
\(f\)
\(f\)
\(f(D(g) x)\)
\(D'(g) f(x)\)
intro
polynomials
examples & code
nonlinearities
Equivariance
\(V\)
\(V'\)
\(D(g)\)
\(D'(g)\)
\(V\)
\(V'\)
\(f\)
\(f\)
\(f(D(g) x)\)
\(D'(g) f(x)\)
\(=\)
intro
polynomials
examples & code
nonlinearities
Polynomials
Most simple yet powerful functions
intro
polynomials
examples & code
nonlinearities
Polynomials
Most simple yet powerful functions
Be able to create polynomials compatible with rotations is a powerful tool
intro
polynomials
examples & code
nonlinearities
Polynomials
\(x \mapsto x^2 + 2(x-4)\)
intro
polynomials
examples & code
nonlinearities
Polynomials
\(x \mapsto x^2 + 2(x-4)\)
\(\begin{bmatrix} x\\ y\\ z \end{bmatrix} \mapsto x^2 + 2(y-z)x\)
intro
polynomials
examples & code
nonlinearities
Polynomials
\(x \mapsto x^2 + 2(x-4)\)
\(\begin{bmatrix} x\\ y\\ z \end{bmatrix} \mapsto x^2 + 2(y-z)x\)
\(\begin{bmatrix} x\\ y\\ z \end{bmatrix} \mapsto \begin{bmatrix} x^2 + 2(y-z) \\ z^4 + 100 x y z\end{bmatrix}\)
intro
polynomials
examples & code
nonlinearities
Equivariant Polynomials
\(P(D(g) x) = D'(g) P(x)\)
\(\begin{bmatrix} x\\ y\\ z \end{bmatrix} \mapsto \begin{bmatrix} x^2 + 2(y-z) \\ z^4 + 100 x y z\end{bmatrix}\)
😟
Not equivariant
\(\begin{bmatrix} x\\ y\\ z \end{bmatrix} \mapsto \begin{bmatrix} x^2 + y^2 + z^2 \end{bmatrix}\)
😌
Equivariant
intro
polynomials
examples & code
nonlinearities
3 Tools to Make Polynomials
- 🔨Composition \(\circ\)
- 🔧Addition \(+\)
- 🔩Multiplication \(\otimes\)
equivariant 😊
intro
polynomials
examples & code
nonlinearities
🔨Composition
two equivariant functions
\(f: V_1 \rightarrow V_2\)
\(h: V_2 \rightarrow V_3\)
\(h\circ f\) is equivariant!! 😊
\( h(f(D_1(g) x)) = h(D_2(g) f(x)) = D_3(g) h(f(x)) \)
intro
polynomials
examples & code
nonlinearities
🔧Addition
two equivariant functions
\(f: V_1 \rightarrow V_3\)
\(h: V_2 \rightarrow V_3\)
\(h + f\) is equivariant!! 😊
\( f(D_1(g) x) + h(D_2(g)x) = D_3(g) (f(x) + h(x)) \)
intro
polynomials
examples & code
nonlinearities
🔩Multiplication
\(\begin{bmatrix} {\color{red} x_1}\\{\color{red} x_2}\\{\color{red} x_3}\end{bmatrix}\)
\(\begin{bmatrix} {\color{blue} y_1}\\{\color{blue} y_2}\\{\color{blue} y_3}\\{\color{blue} y_4}\\{\color{blue} y_5} \end{bmatrix}\)
transforming with \(D(g)\)
transforming with \(D'(g)\)
\(= \begin{bmatrix} x_1y_1 & x_1y_2 & x_1y_3 & x_1y_4 & x_1y_5 \\ x_2y_1 & x_2y_2 & x_2y_3 & x_2y_4 & x_2y_5 \\ x_3y_1 & x_3y_2 & x_3y_3 & x_3y_4 & x_3y_5 \end{bmatrix}\)
intro
polynomials
examples & code
nonlinearities
🔩Multiplication
\(\otimes\)
\(= \begin{bmatrix}{\color{red} x_1} {\color{blue} y_1}&{\color{red} x_1} {\color{blue} y_2}&{\color{red} x_1} {\color{blue} y_3}&{\color{red} x_1} {\color{blue} y_4}&{\color{red} x_1} {\color{blue} y_5}\\{\color{red} x_2} {\color{blue} y_1}&{\color{red} x_2} {\color{blue} y_2}&{\color{red} x_2} {\color{blue} y_3}&{\color{red} x_2} {\color{blue} y_4}&{\color{red} x_2} {\color{blue} y_5}\\{\color{red} x_3} {\color{blue} y_1}&{\color{red} x_3} {\color{blue} y_2}&{\color{red} x_3} {\color{blue} y_3}&{\color{red} x_3} {\color{blue} y_4}&{\color{red} x_3} {\color{blue} y_5}\end{bmatrix}\)
Tensor Product
transforms with \(D(g) \otimes D'(g)\) 😊
\(\dim( D \otimes D' ) = \dim( D ) \dim( D' )\)
\(\begin{bmatrix} {\color{red} x_1}\\{\color{red} x_2}\\{\color{red} x_3}\end{bmatrix}\)
\(\begin{bmatrix} {\color{blue} y_1}\\{\color{blue} y_2}\\{\color{blue} y_3}\\{\color{blue} y_4}\\{\color{blue} y_5} \end{bmatrix}\)
intro
polynomials
examples & code
nonlinearities
\(\text{vector} \otimes \text{vector} \otimes \text{vector} \otimes \dots\)
tensors of shape \(3\times3\times3\times\dots\)
Cartesian Tensors
The grow in dimension is problematic
Luckily the tensor product is reducible
Reducible representations
intro
polynomials
examples & code
nonlinearities
\(D\) defined on \(V\)
is reducible if
\(\exists W \subset V\)
such that
\(D|_W\) is a representation
intro
polynomials
examples & code
conclusion
intro
polynomials
examples & code
nonlinearities
Reducible representations
Famous Example
\(\begin{bmatrix}{\color{red} x_1} {\color{blue} x_2}&{\color{red} x_1} {\color{blue} y_2}&{\color{red} x_1} {\color{blue} z_2}\\{\color{red} y_1} {\color{blue} x_2}&{\color{red} y_1} {\color{blue} y_2}&{\color{red} y_1} {\color{blue} z_2}\\{\color{red} z_1} {\color{blue} x_2}&{\color{red} z_1} {\color{blue} y_2}&{\color{red} z_1} {\color{blue} z_2}\end{bmatrix}\)
\(D\) defined on \(V\)
is reducible if
\(\exists W \subset V\)
such that
\(D|_W\) is a representation
\(\begin{bmatrix} {\color{red} x_1}\\{\color{red} y_1}\\{\color{red} z_1}\end{bmatrix}\otimes\begin{bmatrix} {\color{blue} x_2}\\{\color{blue} y_2}\\{\color{blue} z_2}\end{bmatrix} = \)
intro
polynomials
examples & code
nonlinearities
Reducible representations
\({\color{red}x_1}{\color{blue}x_2} + {\color{red}y_1}{\color{blue}y_2} + {\color{red}z_1} {\color{blue}z_2}\)
\(\begin{bmatrix}c ( {\color{red}x_1} {\color{blue}z_2} + {\color{red}z_1} {\color{blue}x_2} ) \\ c ( {\color{red}x_1} {\color{blue}y_2} + {\color{red}y_1} {\color{blue}x_2} ) \\ 2 {\color{red}y_1} {\color{blue}y_2} - {\color{red}x_1} {\color{blue}x_2} - {\color{red}z_1} {\color{blue}z_2} \\ c ( {\color{red}y_1} {\color{blue}z_2} + {\color{red}z_1} {\color{blue}y_2} ) \\ c ( {\color{red}z_1} {\color{blue}z_2} - {\color{red}x_1} {\color{blue}x_2} ) \\\end{bmatrix}\)
\(\begin{bmatrix}{\color{red}y_1}{\color{blue}z_2}-{\color{red}z_1} {\color{blue}y_2}\\ {\color{red}z_1}{\color{blue}x_2}-{\color{red}x_1}{\color{blue}z_2}\\ {\color{red}x_1}{\color{blue}y_2}-{\color{red}y_1}{\color{blue}x_2}\end{bmatrix}\)
\(\begin{bmatrix}{\color{red} x_1} {\color{blue} x_2}&{\color{red} x_1} {\color{blue} y_2}&{\color{red} x_1} {\color{blue} z_2}\\{\color{red} y_1} {\color{blue} x_2}&{\color{red} y_1} {\color{blue} y_2}&{\color{red} y_1} {\color{blue} z_2}\\{\color{red} z_1} {\color{blue} x_2}&{\color{red} z_1} {\color{blue} y_2}&{\color{red} z_1} {\color{blue} z_2}\end{bmatrix}\)
\(3\times3=1+3+5\)
These can be seen as polynomials!
\(D\) is reducible if
\(\exists W \subset V\)
such that
\(D|_W\) is a representation
intro
polynomials
examples & code
nonlinearities
Irreducible representations
For the group of rotations (\(SO(3)\))
They are index by \(L=0, 1, 2, \dots\)
Of dimension \(2L+1\)
| L=0 | d=1 | scalar |
| L=1 | d=3 | vector |
| L=2 | d=5 | no name? |
intro
polynomials
examples & code
nonlinearities
Irreducible representations
For the group of rotations + parity (\(O(3)\))
They are index by \(L=0, 1, 2, \dots\)
Of dimension \(2L+1\)
| L=0 | d=1 | scalar |
| L=1 | d=3 | peudo vector |
| L=2 | d=5 | no name? |
| L=0 | d=1 | pseudo scalar |
| L=1 | d=3 | vector |
| L=2 | d=5 | no name? |
Even
Odd
🔩Multiplication
intro
polynomials
examples & code
nonlinearities
\(L_1 \otimes L_2 = |L_1-L_2| \oplus \dots \oplus (L_1+L_2)\)
generalization of \(3\times3=1+3+5\)
- \( 2 \otimes 1 = 1 \oplus 2 \oplus 3 \)
- \( 2 \otimes 2 = 0\oplus 1 \oplus 2 \oplus 3 \oplus 4 \)
intro
polynomials
examples & code
nonlinearities
🔨Composition
🔧Addition
🔩Multiplication
Composition of equivariant polynomials ✅
Addition of equivariant polynomials ✅
Tensor Product of equivariant polynomials ✅
\(L_1 \otimes L_2 = |L_1-L_2| \oplus \dots \oplus (L_1+L_2)\)
p2(p1(x, y), z)p1(x, y) + p2(w, z)from e3nn import o3
p = o3.FullTensorProduct("1o", "1o")
p(x, y)intro
polynomials
examples & code
nonlinearities
🔨Composition
🔧Addition
🔩Multiplication
Composition of equivariant polynomials ✅
Addition of equivariant polynomials ✅
Tensor Product of equivariant polynomials ✅
\(L_1 \otimes L_2 = |L_1-L_2| \oplus \dots \oplus (L_1+L_2)\)
p2(p1(x, y), z)p1(x, y) + p2(w, z)from e3nn import o3
p = o3.FullTensorProduct("1o", "1o")
p(x, y)intro
polynomials
examples & code
nonlinearities
Spherical Harmonics
Representation of highest order (\(l\)) in \(\vec x \otimes \vec x \otimes \dots\)

https://e3nn.org/mrs
intro
polynomials
examples & code
nonlinearities
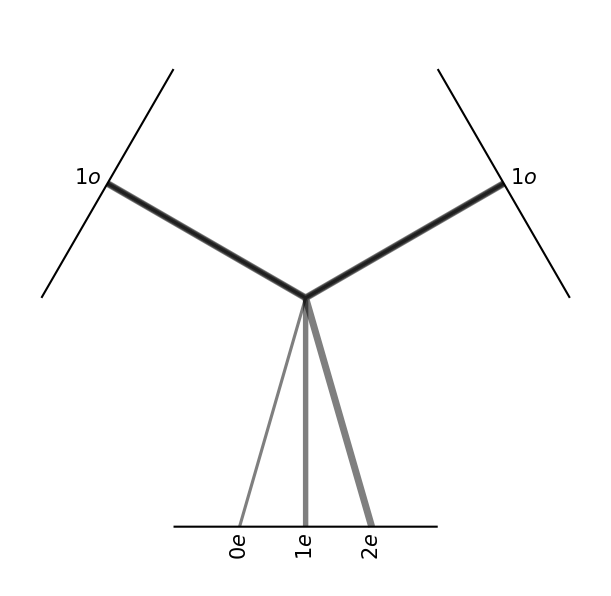
Tensor Product with weights
\(3\times3=1+3+5\)
\(\begin{bmatrix}{\color{red} x_1} {\color{blue} x_2}&{\color{red} x_1} {\color{blue} y_2}&{\color{red} x_1} {\color{blue} z_2}\\{\color{red} y_1} {\color{blue} x_2}&{\color{red} y_1} {\color{blue} y_2}&{\color{red} y_1} {\color{blue} z_2}\\{\color{red} z_1} {\color{blue} x_2}&{\color{red} z_1} {\color{blue} y_2}&{\color{red} z_1} {\color{blue} z_2}\end{bmatrix}\)
\({\color{red}x_1}{\color{blue}x_2} + {\color{red}y_1}{\color{blue}y_2} + {\color{red}z_1} {\color{blue}z_2}\)
\(\begin{bmatrix}{\color{red}y_1}{\color{blue}z_2}-{\color{red}z_1} {\color{blue}y_2}\\ {\color{red}z_1}{\color{blue}x_2}-{\color{red}x_1}{\color{blue}z_2}\\ {\color{red}x_1}{\color{blue}y_2}-{\color{red}y_1}{\color{blue}x_2}\end{bmatrix}\)
\(\begin{bmatrix}c ( {\color{red}x_1} {\color{blue}z_2} + {\color{red}z_1} {\color{blue}x_2} ) \\ c ( {\color{red}x_1} {\color{blue}y_2} + {\color{red}y_1} {\color{blue}x_2} ) \\ 2 {\color{red}y_1} {\color{blue}y_2} - {\color{red}x_1} {\color{blue}x_2} - {\color{red}z_1} {\color{blue}z_2} \\ c ( {\color{red}y_1} {\color{blue}z_2} + {\color{red}z_1} {\color{blue}y_2} ) \\ c ( {\color{red}z_1} {\color{blue}z_2} - {\color{red}x_1} {\color{blue}x_2} ) \\\end{bmatrix}\)
\(\begin{bmatrix} {\color{red} x_1}\\{\color{red} y_1}\\{\color{red} z_1}\end{bmatrix}\otimes\begin{bmatrix} {\color{blue} x_2}\\{\color{blue} y_2}\\{\color{blue} z_2}\end{bmatrix} = \)
"1o" time "1o"
"1o"
"1o"
"0e"
"1e"
"2e"
https://e3nn.org/mrs
intro
polynomials
examples & code
nonlinearities
Tensor Product with weights
first argument
second argument
output
\(3\times3=1+3+5\)
https://e3nn.org/mrs
intro
polynomials
examples & code
nonlinearities
Tensor Product with weights
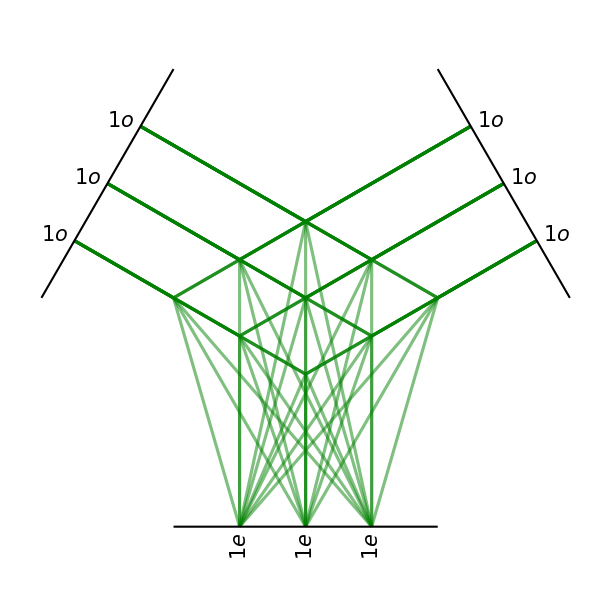
3 vectors times 3 vectors given 3 pseudovectors
each output is the weight sum of 9 pseudovectors
This operation contains 27 parameters
https://e3nn.org/mrs
intro
polynomials
examples & code
nonlinearities
Reduce Tensor Product
Consider for instance the inertia tensor
\(\displaystyle I_{ij} = \int dx \; \rho(x) \; (\|x\|^2 \delta_{ij} - x_i x_j)\)
It is a \(\text{vector} \otimes \text{vector}\) symmetric tensor (\(I_{ij} = I_{ji}\))
It can be decomposed into a scalar and a \(l=2\) irrep
https://e3nn.org/mrs
intro
polynomials
examples & code
nonlinearities
Nonlinearities
intro
polynomials
examples & code
nonlinearities
Nonlinearities
Gate
\( \phi(P(x)) Q(x) \)
invariant polynomial
equivariant polynomial
sigmoid like function
Conclusion
- Group and representations
-
😊 Equivariance \(f({\color{purple}D(g)} x) = {\color{darkgreen}D'(g)} f(x)\)
- 🔨Composition
- 🔧Addition
- Polynomials
- 🔩 Tensor Product \(L_1 \otimes L_2 = |L_1-L_2| \oplus \dots \oplus (L_1+L_2)\)
- Polynomials with weights
-
Nonlinearities
- Gate
https://e3nn.org/mrs
Thank you for listening!
https://e3nn.org/mrs
e3nn math
By Mario Geiger




