
RSS 2025 Workshop on
Human-Robot Contact and Manipulation
Organizers
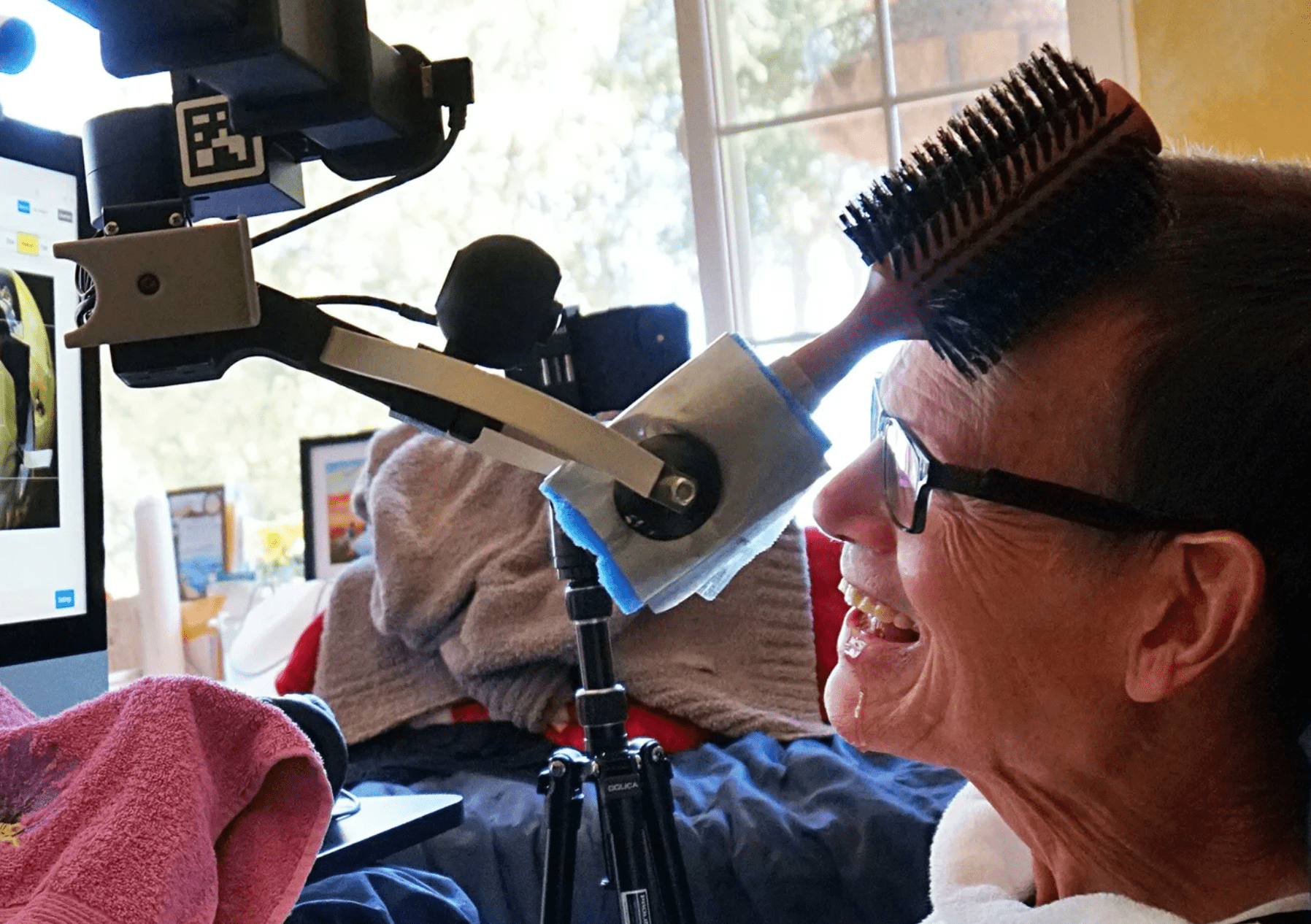
Image Credit: Hello Robot, Inc.Workshop Goal: Unite Expertise
Hardware Design
Control Through Contact
Physical Human-Robot Interaction
Pattabiraman et al.
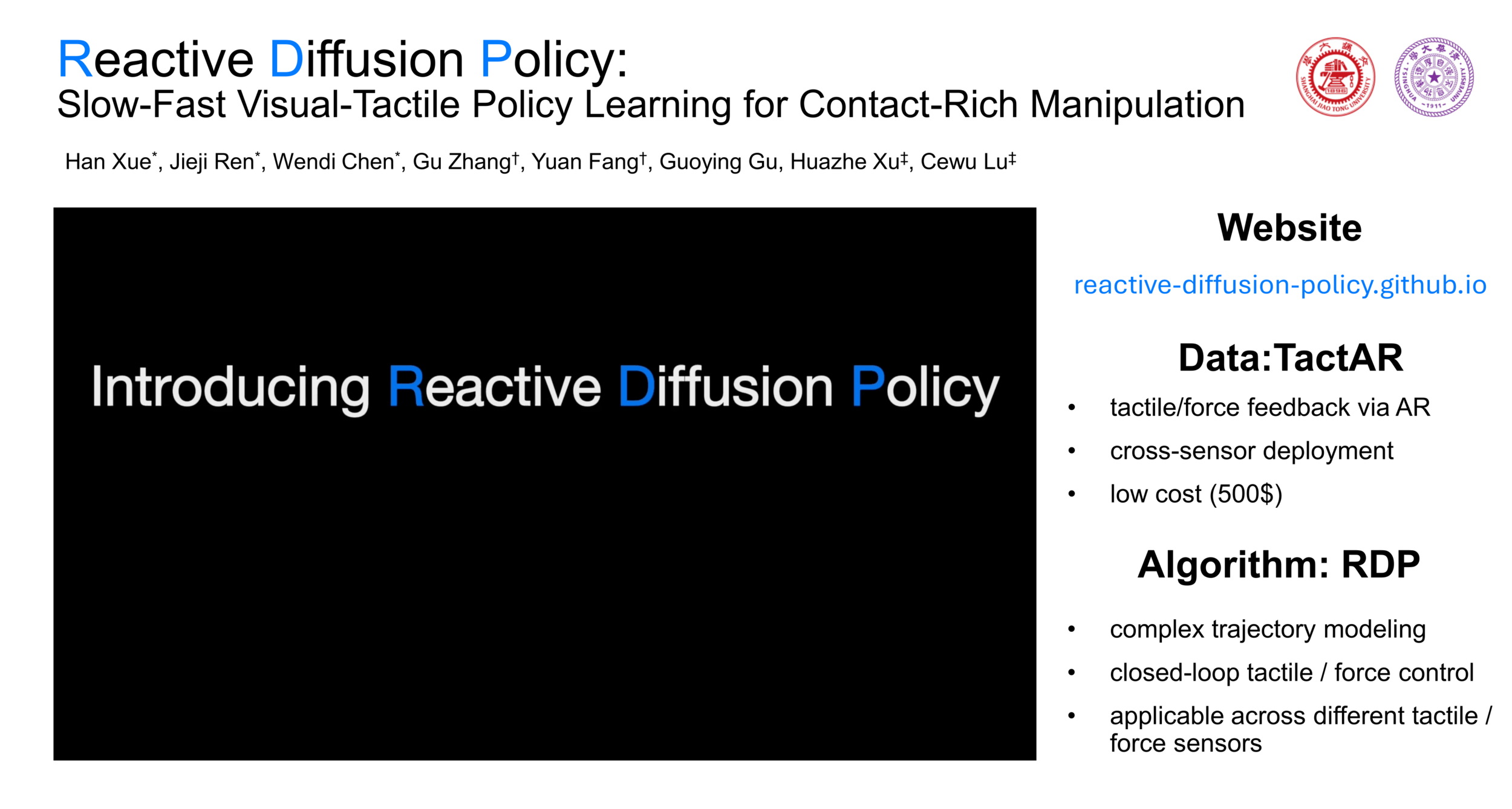
Xue et al.
Armstrong et al.
Schedule Summary
| 8:45am | Opening and Introductions |
| 8:55am | Sylvain Calinon, Idiap |
| 9:15am | Wanxin Jin, ASU |
| 9:35am | Poster Lightning Talks (12 x 60s) |
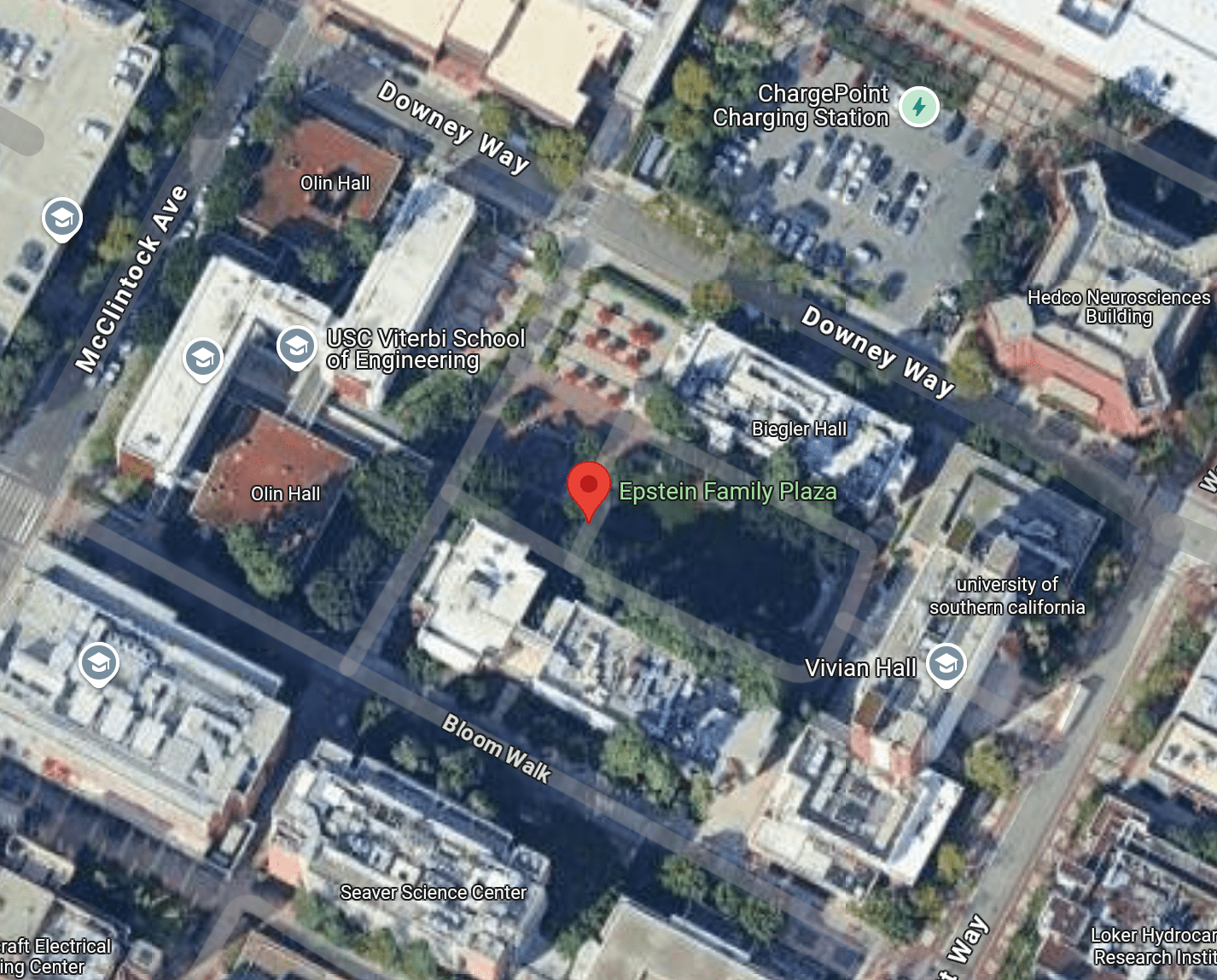
| 9:50am | Poster Session @ Epstein Family Plaza Coffee: 10am. Poster Take-Down at 10:20am |
| 10:25am | Luka Peternel, TU Delft |
| 10:45am | Tania Morimoto, UCSD |
| 11:05am | Laurel Riek, UCSD |
| 11:25am | Vy Nguyen, OT, Hello Robot |
| 11:45am | Breakout Discussion |
| 12:10pm | Debrief and Conclusion |
Breakout Questions to Consider...
What new models, hardware, datasets, or algorithms are necessary for more robust and tractable contact-rich control?
What benchmarks and metrics can demonstrate the applicability of the above to physical human-robot interaction?
These will be the guiding themes of the Breakout Discussion
Dr. Sylvain Calinon
Frugal Learning for Collaborative Tasks with Physical Contacts

Prof. Wanxin Jin
Leveraging Contact Physics for Real-Time and Versatile Contact-Rich Dexterity
Poster Lightning Talks!
| Hongyu Li | UniTac: Whole-Robot Touch Sensing Without Tactile Sensors |
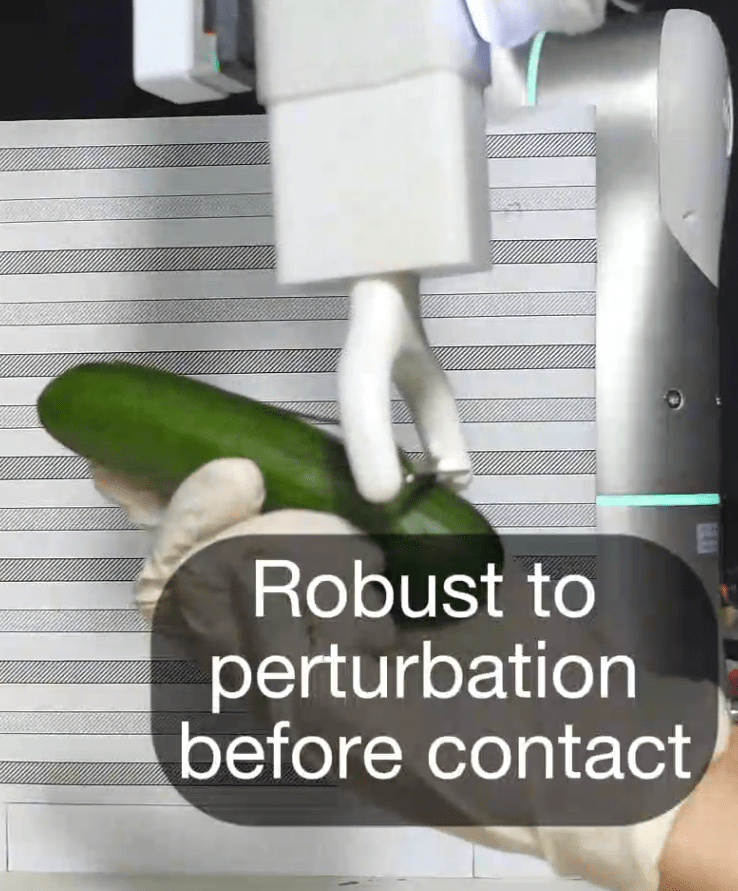
| Han Xue | Reactive Diffusion Policy: Slow-Fast Visual-Tactile Policy Learning for Contact-Rich Manipulation |
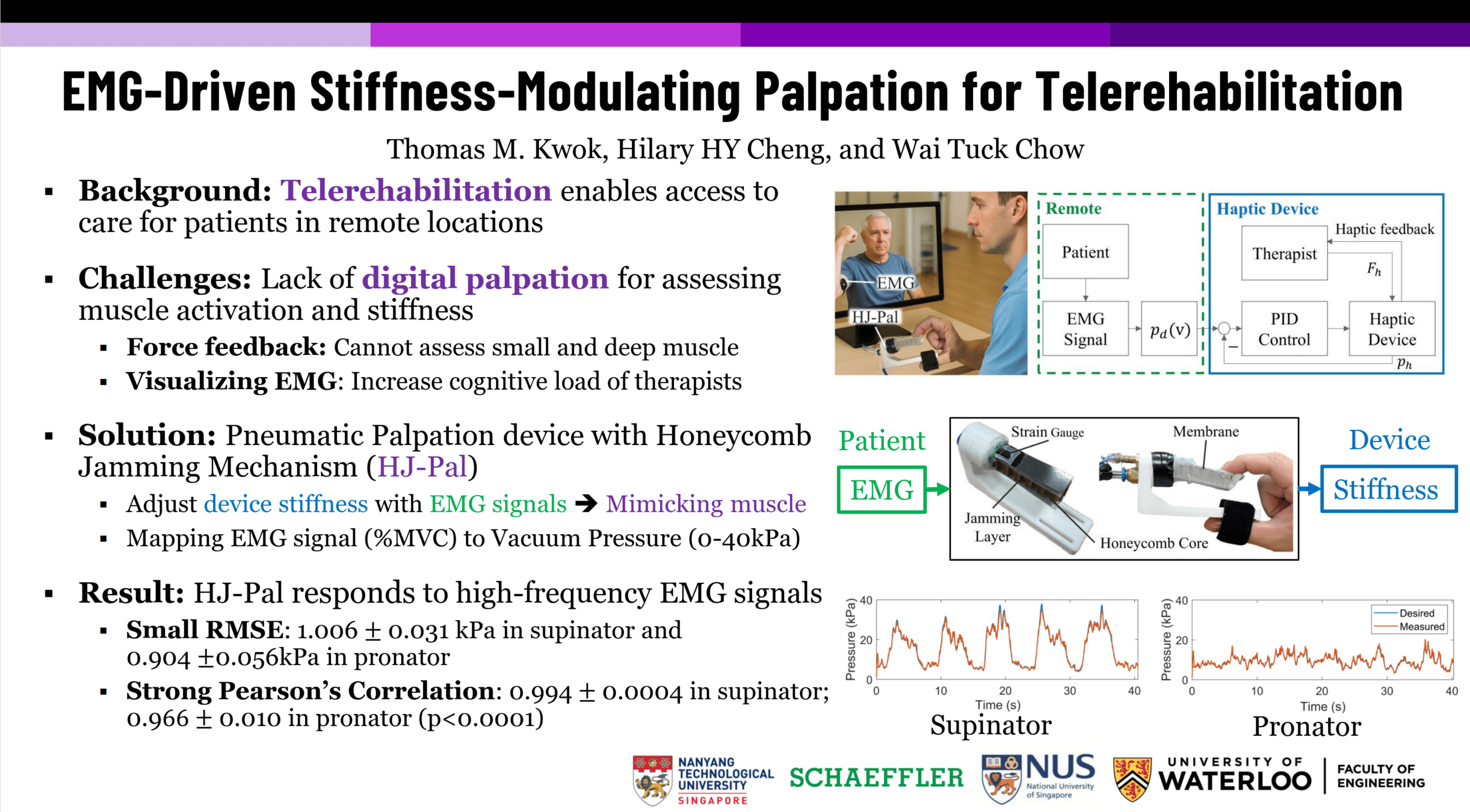
| Thomas M. Kwok | EMG-Driven Stiffness-Modulating Palpation for Telerehabilitation |
| Akua K. Dickson | Safe Autonomous Environmental Contact for Soft Robots using Control Barrier Functions |
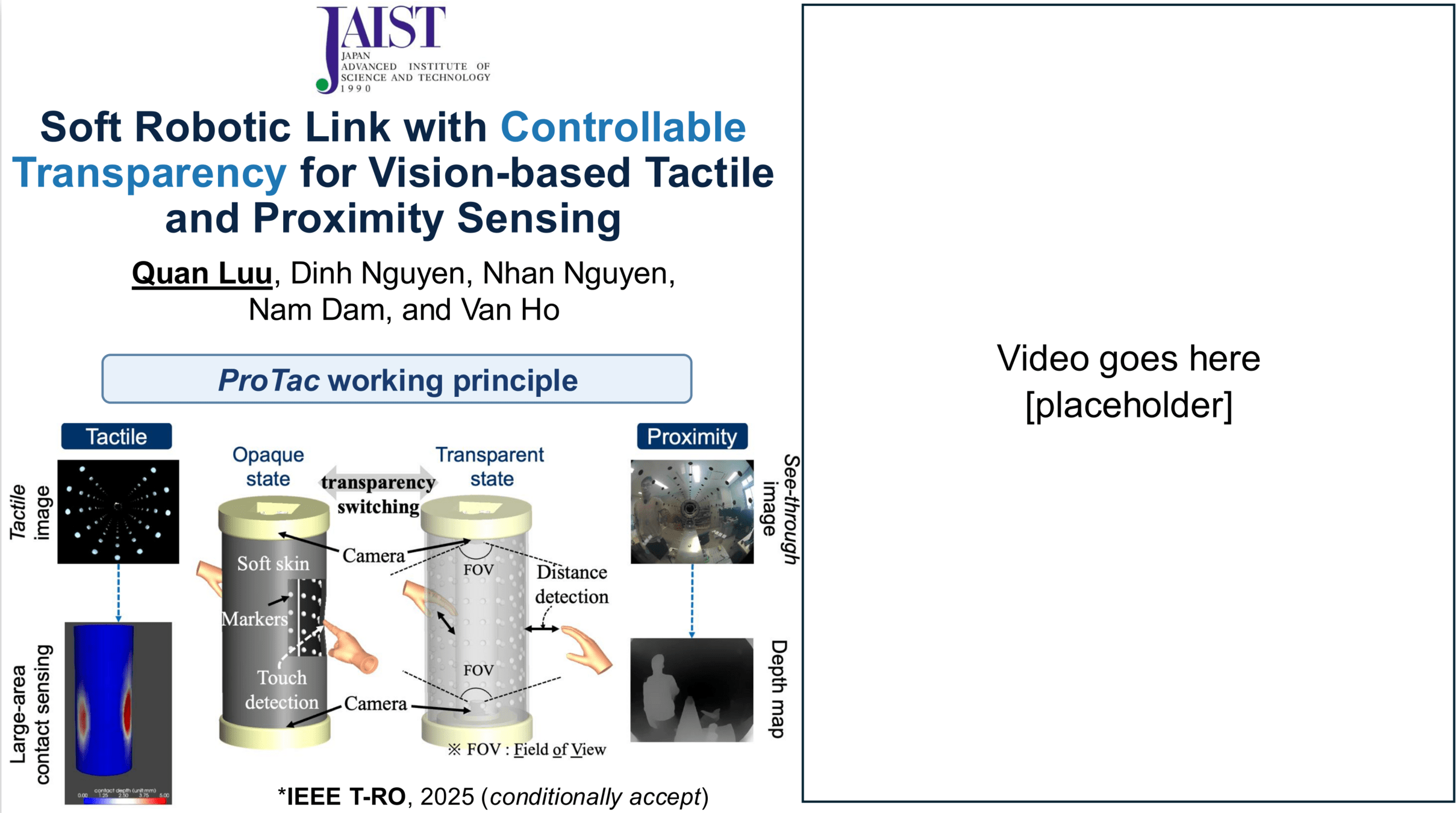
| Quan Khanh Luu | Soft Robotic Link with Controllable Transparency for Vision-based Tactile and Proximity Sensing |
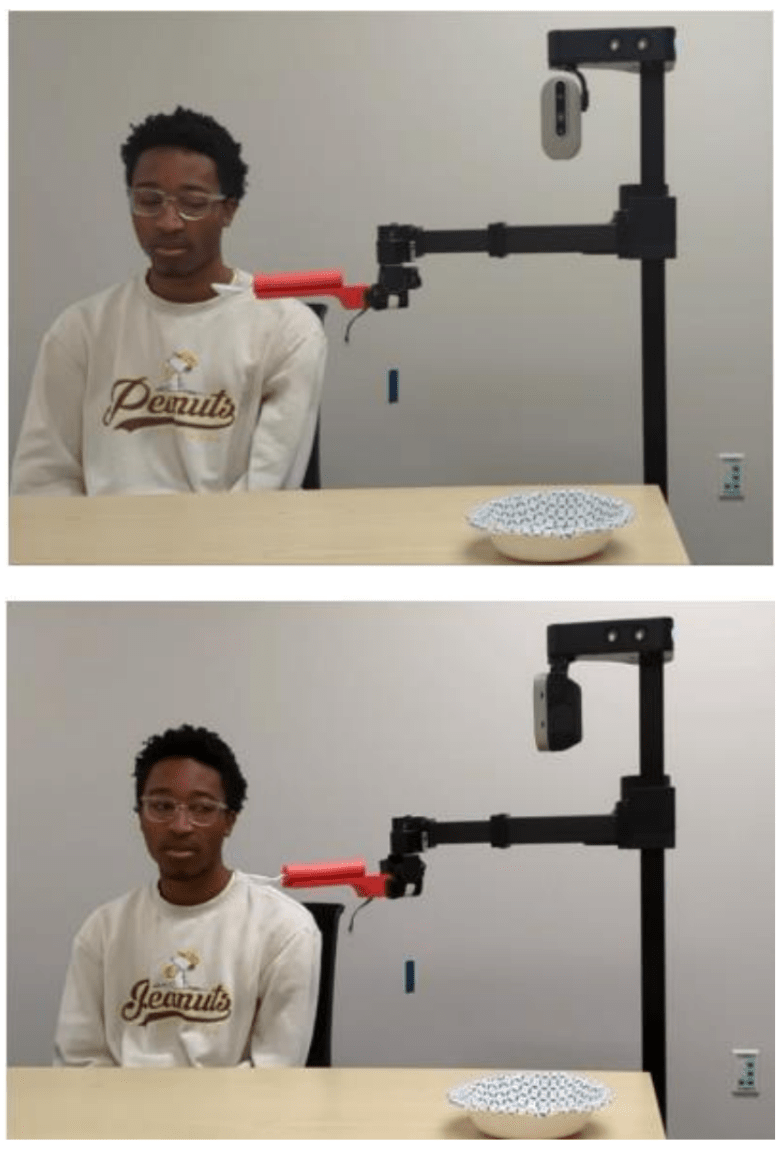
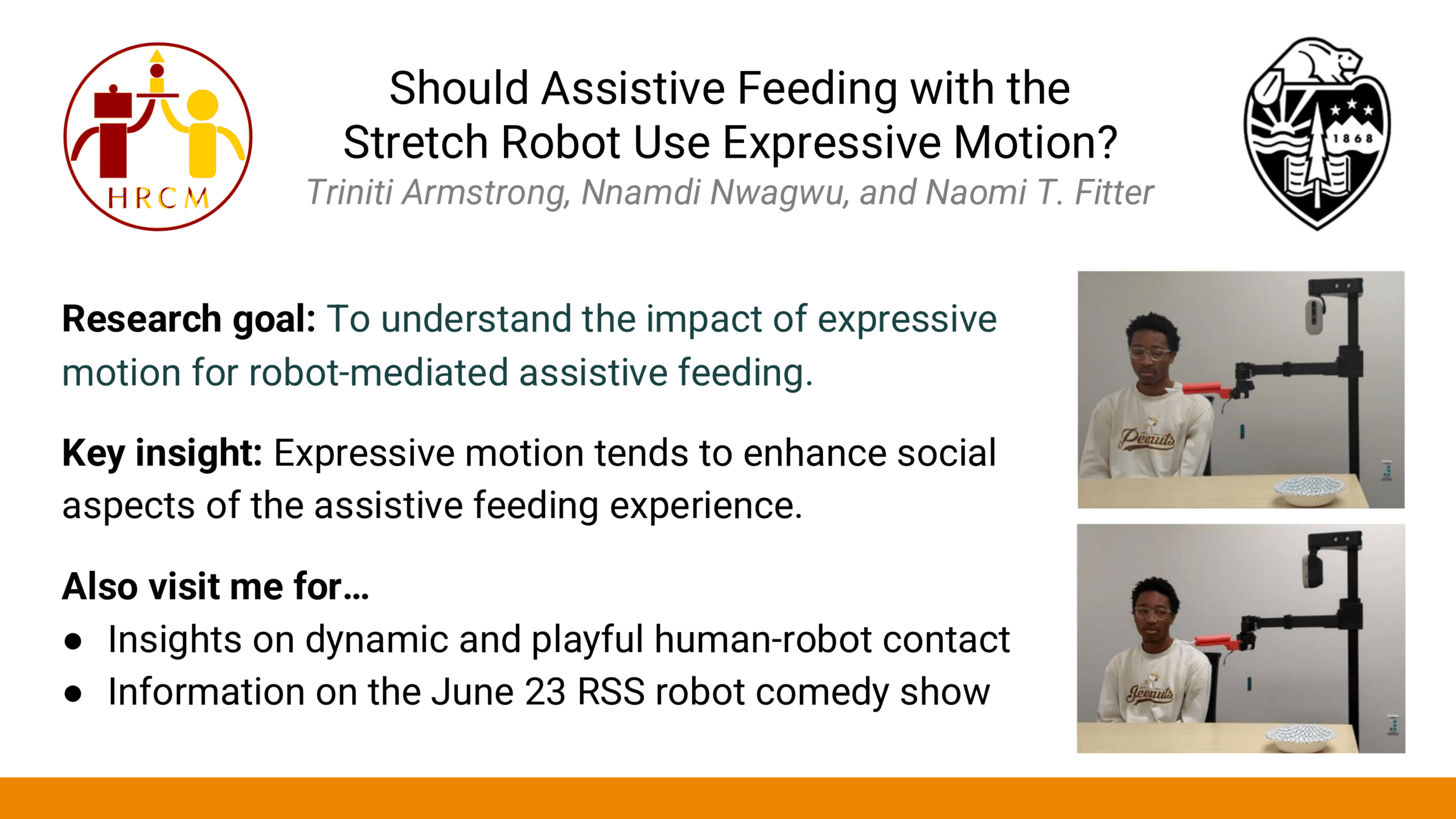
| Naomi T. Fitter | Should Assistive Feeding with the Stretch Robot Use Expressive Motion? |
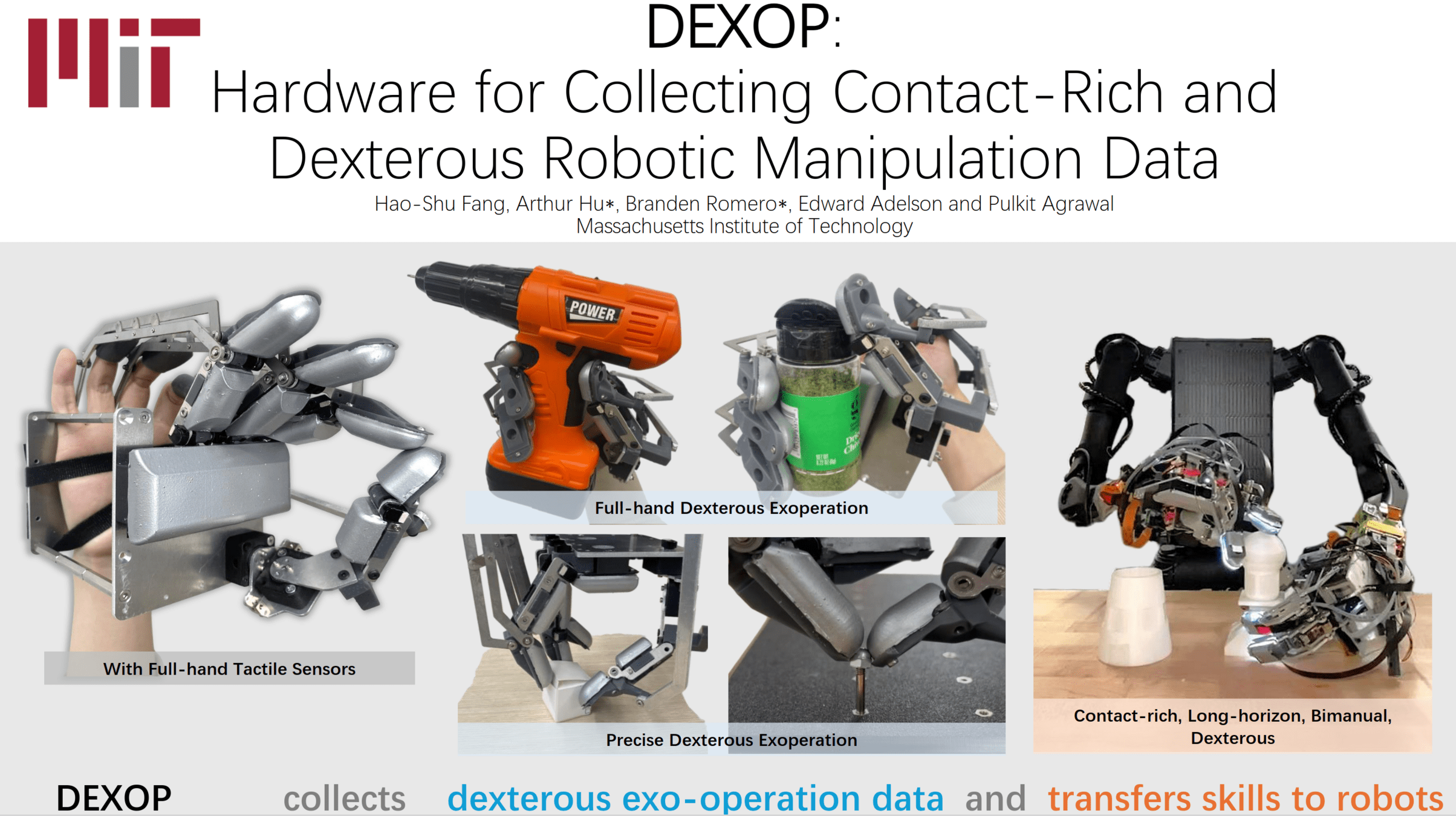
| Hao Shu Fang | DEXOS: Hardware for Collecting Contact-Rich and Dexterous Robotic Manipulation Data In-The-Wild |
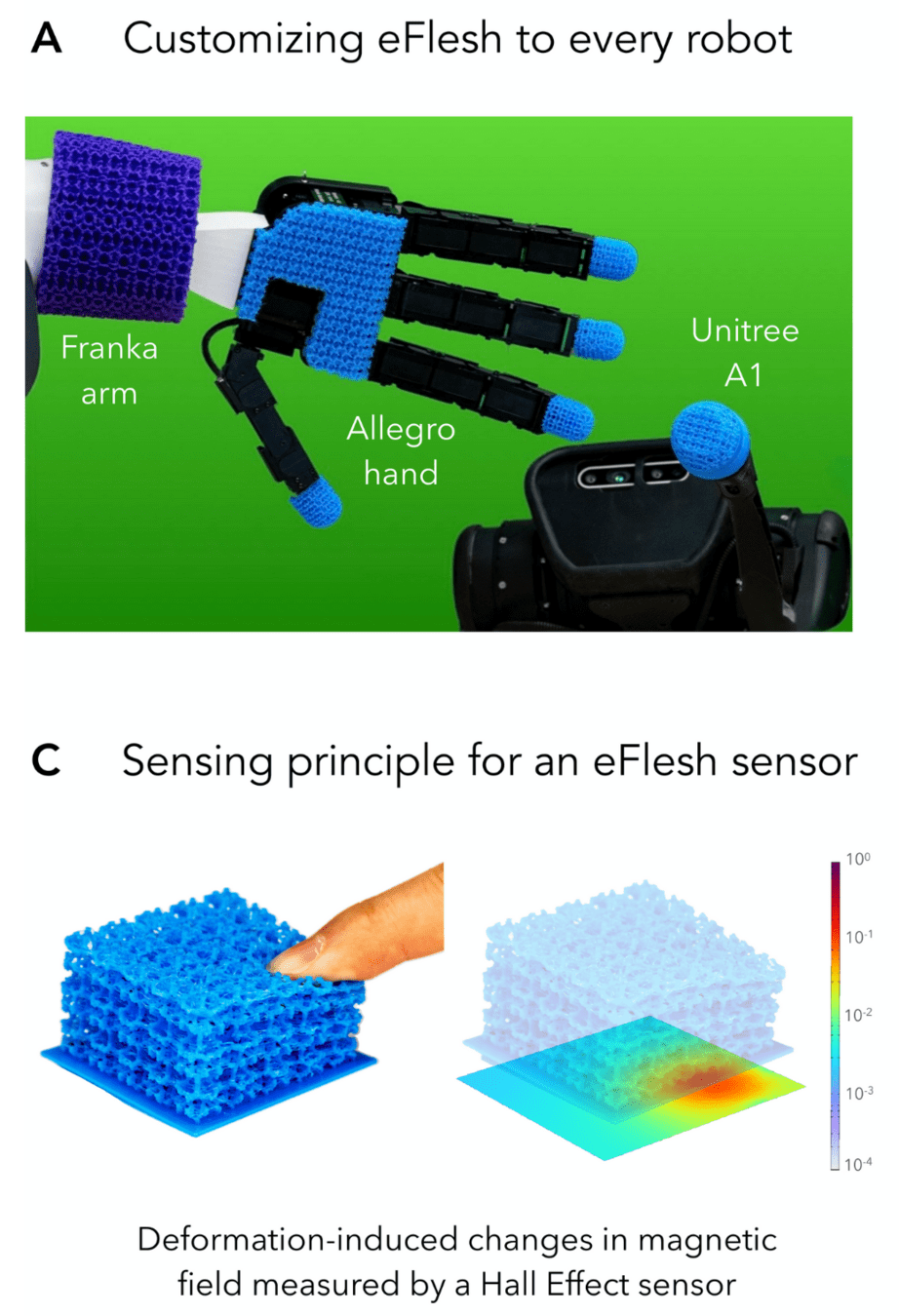
| Venkatesh Pattabiraman | eFlesh: Highly customizable Magnetic Touch Sensing using Cut-Cell Microstructures |
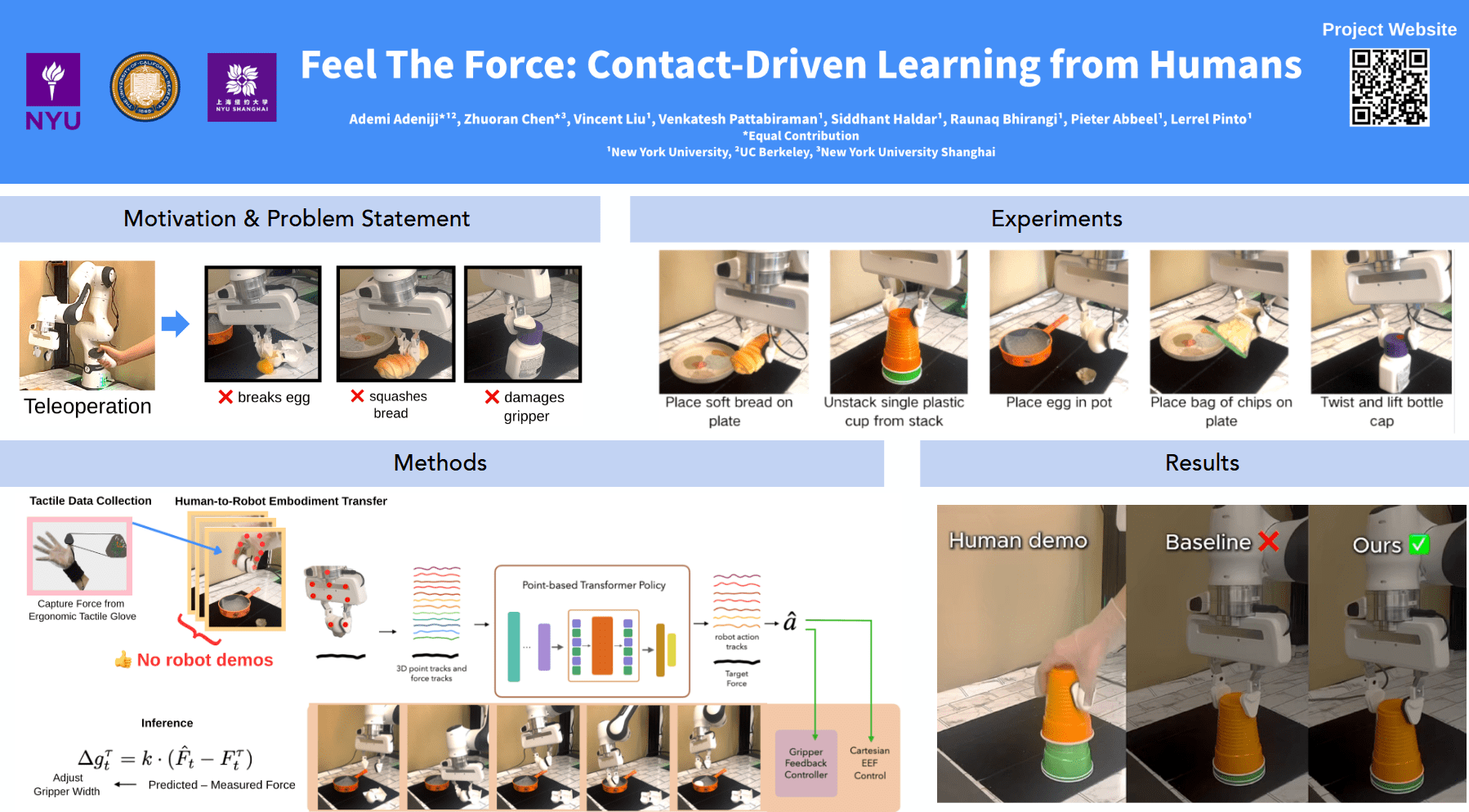
| Ademi Adeniji | Feel the Force: Contact-Driven Learning from Humans |
| Raunaq Bhirangi | AnySkin: Plug-and-play Skin Sensing for Robotic Touch |
| Yaashia Gautam | Compliant Explicit Reference Governor for Contact |
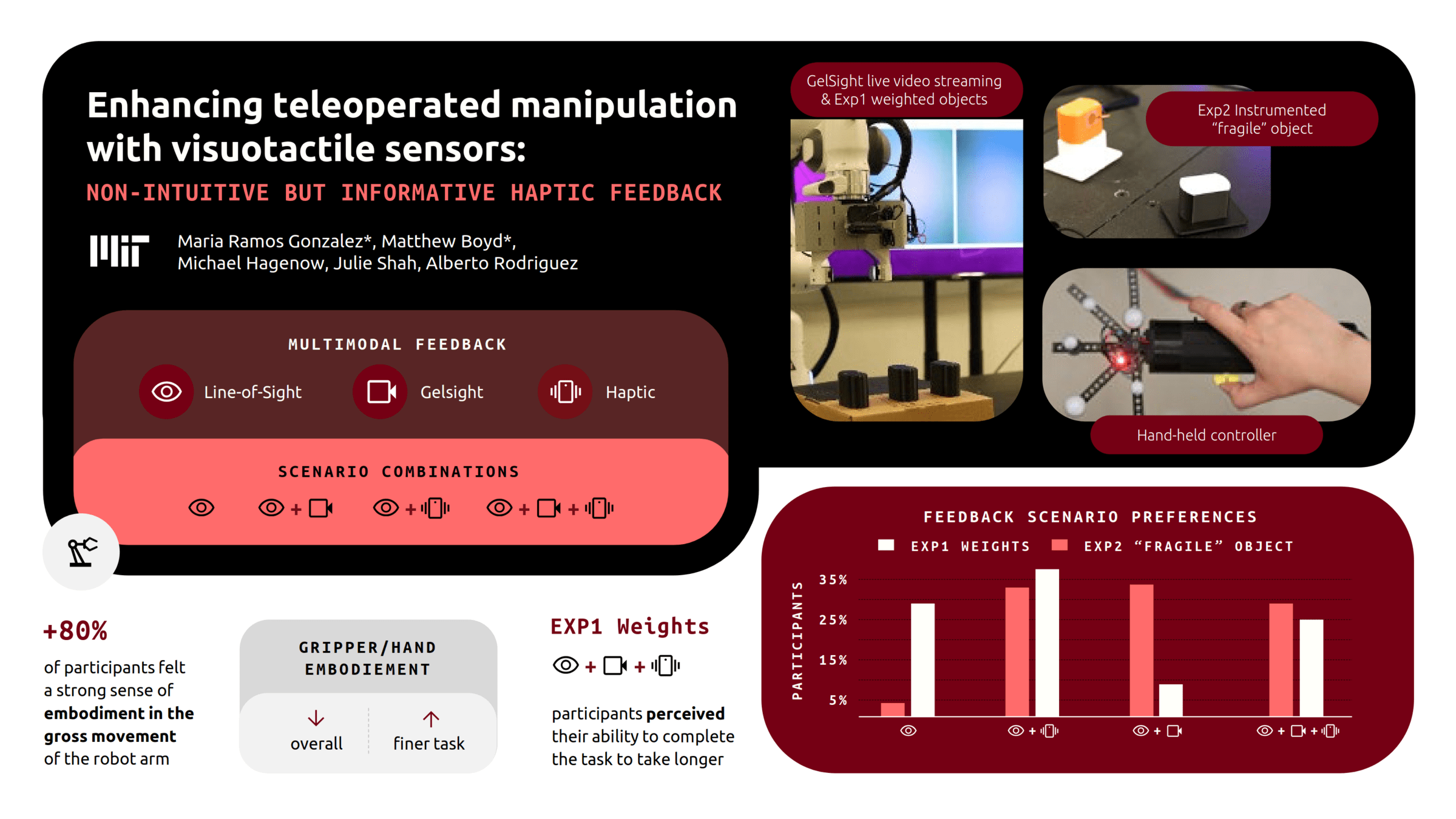
| Maria Ramos Gonzalez | Enhancing Teleoperated Manipulation with Visuotactile Sensors: Non-Intuitive but Informative Haptic Feedback |



Safe Autonomous Environmental Contact for Soft Robots using Control Barrier Functions
Akua Dickson
Boston University

Poster Session + Coffee Break
Coffee Served at 10am
Poster Take-Down at 10:20am
(there is another session right after us)
Back here by 10:25am!
Prof. Luka Peternel
Biomechanics-Aware Physical Human-Robot Interaction
Prof. Tania Morimoto
Design and Control of Soft Robots and Haptic Interfaces
Prof. Laurel Riek
Mobile Telemanipulator Robots for Medicine and Accessibility

V Nguyen, OT
Co-Designing Inclusive Assistive Robots

Breakout Discussion
What new models, hardware, datasets, or algorithms are necessary for more robust and tractable contact-rich control?
What benchmarks and metrics can demonstrate the applicability of the above to physical human-robot interaction?
Get in groups of 5-10.
Reconvene at 12:35 for the Debrief!
Choose 1 spokesperson to summarize your conclusions.
Debrief
Action Item: New Slack Channel on #robotics-worldwide
Share your email to join!
https://forms.gle/4HpxFKozDDG1QpGm7
Spokesperson from each group summarize your conclusions.
Final Thoughts
Thank you all for attending!
Keep an eye out for a Slack invite. Enjoy RSS 2025!
-
Benchmarks/Metrics:
- Use existing metrics, IEEE, but also FDA
- Important to keep users in the design loop
-
Modeling:
- It's important to model the human (biomechanics + probabilistic intent)
- Bring models higher up the stack than just lower-level control
- Sensors can also help the operator, not just the co-manipulator
-
Hardware:
- Sensors should be task-specific (especially tactile sensors)
- Robustness should be a metric (e.g. cycle times, real-time noise)
RSS 2025 Workshop on
Human-Robot Contact and Manipulation
Organizers
Image Credit: Hello Robot, Inc.2025 Workshop on Human-Robot Contact and Manipulation (HRCM)
By Michael Posa
2025 Workshop on Human-Robot Contact and Manipulation (HRCM)
June 21, 2025 RSS 2025 Workshop on Human-Robot Contact and Manipulation (HRCM)




