Lección 4: Primeros modelos de sistemas fisiológicos | Linealización local de componentes
BE3024 - Sistemas de Control 1 (Biomédica)
2do ciclo, 2024
¿Por qué?
Mecánica respiratoria linealizada
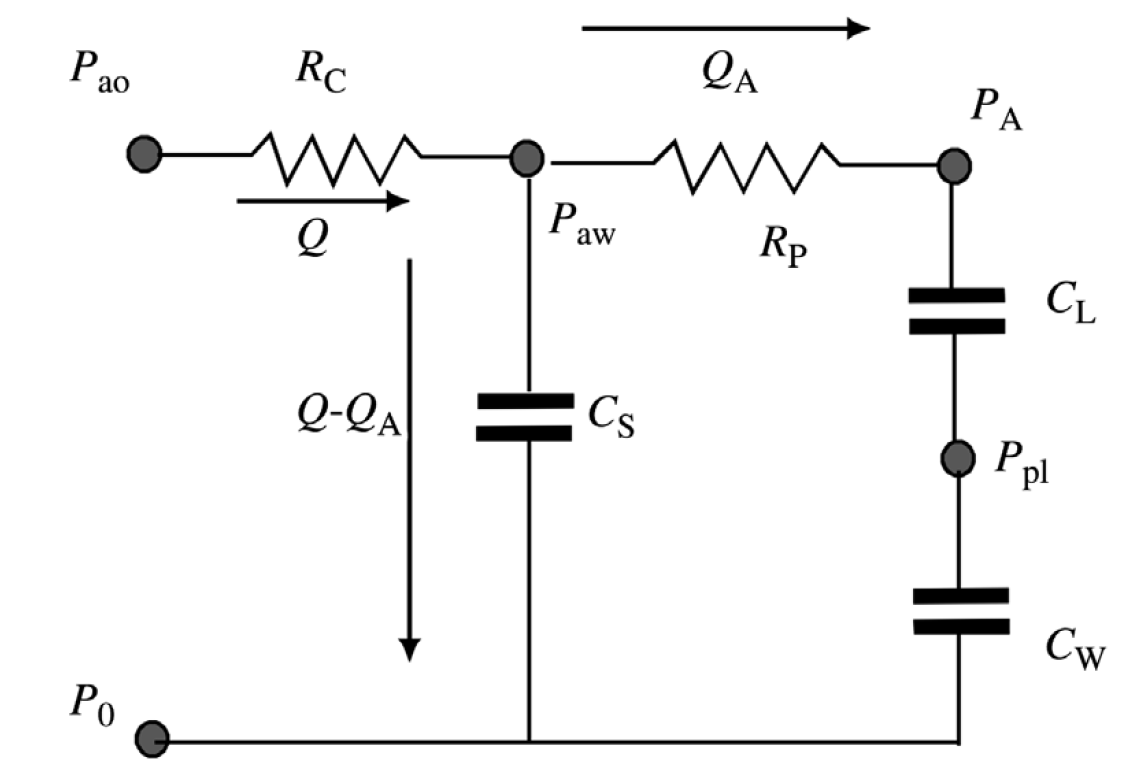
vías respiratorias centrales
vías respiratorias periféricas
Mecánica respiratoria linealizada
vías respiratorias centrales
vías respiratorias periféricas
Puede obtenerse mayor detalle sobre el modelo en la sección 2.3 del libro de Khoo.
Mecánica respiratoria linealizada
G(s)=\dfrac{\mathrm{Q}(s)}{\mathrm{P}_{ao}(s)}
¿Modelo?
\mathrm{Q}(s) \equiv I_1(s)
\mathrm{P}_{ao}(s) \equiv V(s)
m_1: \quad \left(R_C+\frac{1}{C_Ss}\right)I_1(s)-\left(\frac{1}{C_Ss}\right)I_2(s)=V(s)
m_2: \quad \left(\frac{1}{C_Ss}+R_P+\frac{1}{C_Ls}+\frac{1}{C_Ws}\right)I_2(s)-\left(\frac{1}{C_Ss}\right)I_1(s)=0
G(s)=\dfrac{C_LC_SC_WR_Ps^2+\left(C_LC_S+C_LC_W+C_SC_W\right)s}{C_LC_SC_WR_CR_Ps^2 + \left(C_LC_SR_C + C_LC_WR_C + C_SC_WR_C + C_LC_WR_P\right)s + C_L + C_W }
problemático de manejar a mano
>> clase4_respiratorio.m
¿Modelo sin "linealizar"?
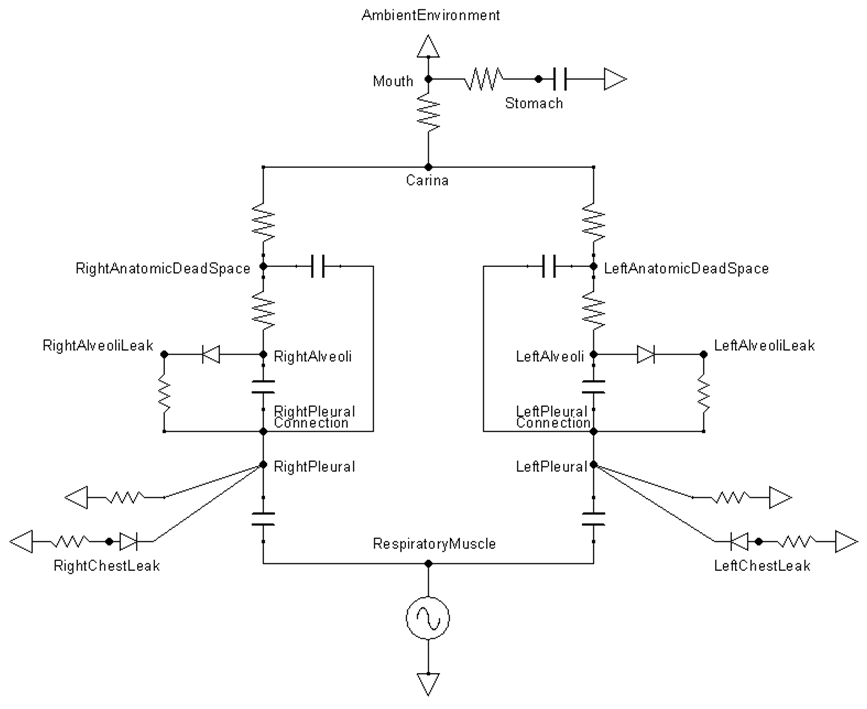
¿Modelo sin "linealizar"?
problema
Modelo muscular de Hill
f(t)
SE
PE
CE
Modelo muscular de Hill
f(t)
SE
PE
CE
problema de nuevo
Linealización local de componentes alrededor de un punto de operación
¿Qué tan común es esta situación?

¿Qué tan común es esta situación?
linealización
¿Qué tan común es esta situación?
linealización
¿Cómo lo hacemos?
¿Cuántas funciones lineales vs no lineales podemos graficar en el plano?
f(y)
y
f(y)
y
y_o
f(y_o)
punto de operación
\delta y
\delta f(y)
\text{línea}(y) \approx f(y)
\text{siempre que } y \approx y_o
Si \(y \approx y_o \) entonces podemos aproximar a \(f(y)\) mediante la línea recta:
\delta y = y - y_o
\delta f(y) = f(y) - f(y_o)
Si definimos
f(y) - f(y_o) = m_o (y - y_o)
\Rightarrow \delta f(y) = m_o \delta y
\Rightarrow f(y) \approx m_o \delta y + f(y_o)
(recta que pasa por el origen)
m_o = \left. \dfrac{d f(y)}{dy} \right\vert_{y=y_o}
f(y) \approx \left. \dfrac{d f(y)}{dy} \right\vert_{y=y_o} \underbrace{(y-y_o)}_{\delta y} + f(y_o)
Términos lineales de la expansión por series de Taylor de \(f(y)\) alrededor de \(y_o\)
Procedimiento
- Encontramos la no linealidad \(f(y)\).
- Encontramos el punto de operación \(y_o\).
- Aproximamos con la fórmula.
- Transformamos la EDO a las coordenadas linealizadas y se sustituye la aproximación de \(f(y)\).
Si no se provee el punto de operación y este no puede obtenerse mediante algún tipo de análisis en estado estacionario entonces:
- \(y_o\) = referencia del sistema de control.
- \(y_o\) tal que \(f(y_o)=0\) para una selección estratégica de \(f(y)\).
punto de equilibrio
Linealice para pequeñas variaciones alrededor de \(y_o=\pi/4\), encuentre la función de transferencia y la respuesta al escalón.
\ddot{y}+2\dot{y}+\cos(y)=0
Linealice para pequeñas variaciones alrededor de \(y_o=\pi/4\), encuentre la función de transferencia y la respuesta al escalón.
\ddot{y}+2\dot{y}+\cos(y)=0
G = tf(1, [-2/sqrt(2), -4/sqrt(2), 1]);
step(G);
linealice para pequeñas variaciones alrededor de \(y_o=\pi/4\), encuentre la función de transferencia y la respuesta al escalón
\ddot{y}+2\dot{y}+\cos(y)=0
G = tf(1, [-2/sqrt(2), -4/sqrt(2), 1]);
step(G);
Desafortunadamente, MATLAB no puede linealizar directamente el modelo no lineal.
linealice para pequeñas variaciones alrededor de \(y_o=\pi/4\), encuentre la función de transferencia y la respuesta al escalón
\ddot{y}+2\dot{y}+\cos(y)=0
G = tf(1, [-2/sqrt(2), -4/sqrt(2), 1]);
step(G);
Desafortunadamente, MATLAB no puede linealizar directamente el modelo no lineal.
pero Simulink sí
De ecuaciones diferenciales a diagramas de bloques
Procedimiento
- Se despeja para la derivada más alta.
- Se grafica la secuencia de integradores.
- Se generan los términos asociados a la salida.
- Se combina con la entrada y se cierra el lazo.
¿Cuál es el diagrama de bloques?
y^{(3)}-2\ddot{y}-5\dot{y}-6y=u

¿Cuál es el diagrama de bloques?
y^{(3)}-2\ddot{y}-5\dot{y}-6y=u
y^{(3)} = 2\ddot{y} + 5\dot{y} + 6y + u
f(\theta)=\sin(\theta) \qquad \theta_o=0
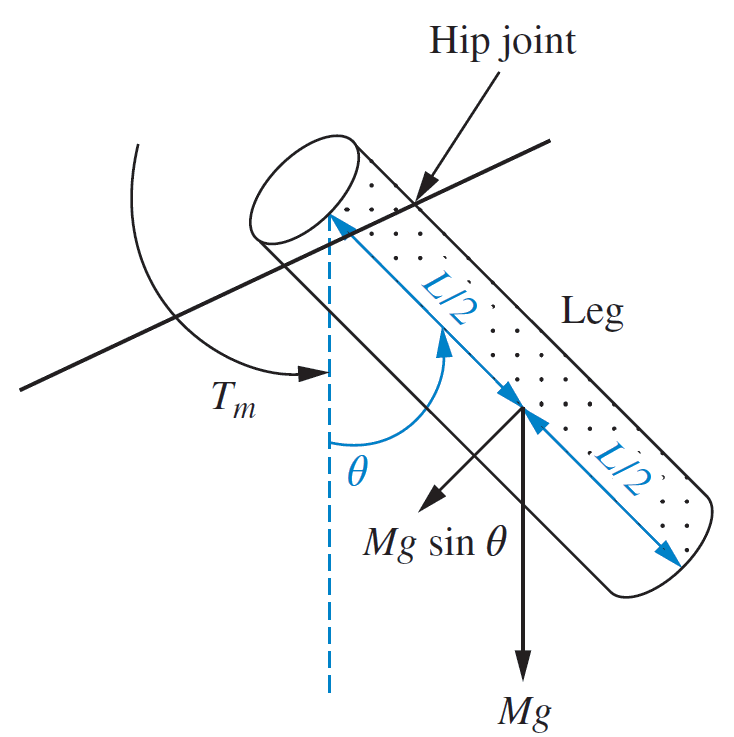
Modelo (biomecánico) simplificado de una pierna
G(s)=\dfrac{\Delta\Theta(s)}{\mathrm{T}_m(s)}
J\ddot{\theta}+D\dot{\theta}+\frac{MgL}{2}\sin(\theta)=T_m
G(s)=\dfrac{\frac{1}{J}}{s^2 + \frac{D}{J}s + \frac{Mg\ell}{2J}}
J = 30; D = 10; M = 15; ell = 1; g = 9.81;
G = tf(1/J, [1, D/J, M*g*ell/(2*J)]);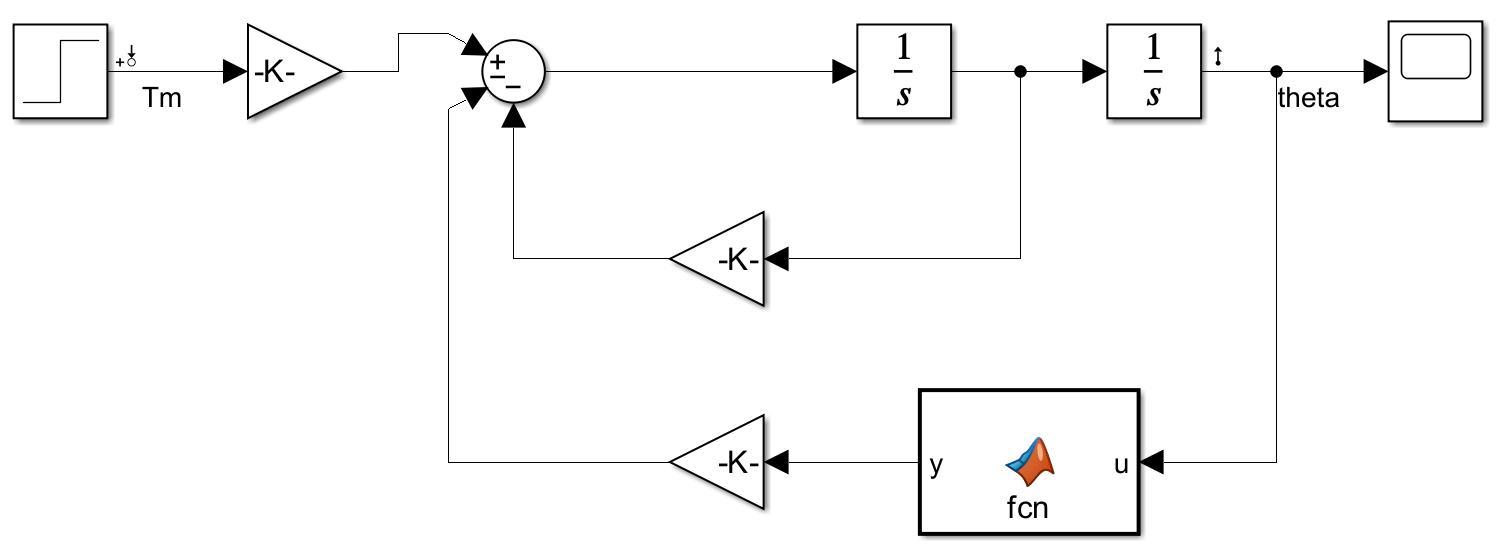
>> clase4_simulacion_pierna.slx
J = 30; D = 10; M = 15; ell = 1; g = 9.81;
G = tf(1, [J, D, M*g*ell/2]);>> clase4_simulacion_pierna.m
Luego, el diagrama ya puede emplearse dentro del Model Linearizer.
BE3024 - Lecture 4 (2024)
By Miguel Enrique Zea Arenales



