Introducción a navegación y a la fusión de sensores
MT3006 - Robótica 2

¿Por qué?


Guidance
Navigation
Control
Guidance
Navigation
Control
\(\sim\) planificación de movimiento
Guidance
Navigation
Control
\(\sim\) planificación de movimiento
*
* asumiendo que se conoce el mapa a-priori
*
* asumiendo que se tiene el estado del robot
Guidance
Navigation
Control
\(\sim\) planificación de movimiento
*
* asumiendo que se conoce el mapa a-priori
*
* asumiendo que se tiene el estado del robot
garantiza que pueden hacerse estas suposiciones
Navegación
involucra la solución a los problemas de localización (principalmente) y mapeo
Navegación
involucra la solución a los problemas de localización (principalmente) y mapeo
\(\sim\) estimación de pose (estado)
Marcos de navegación
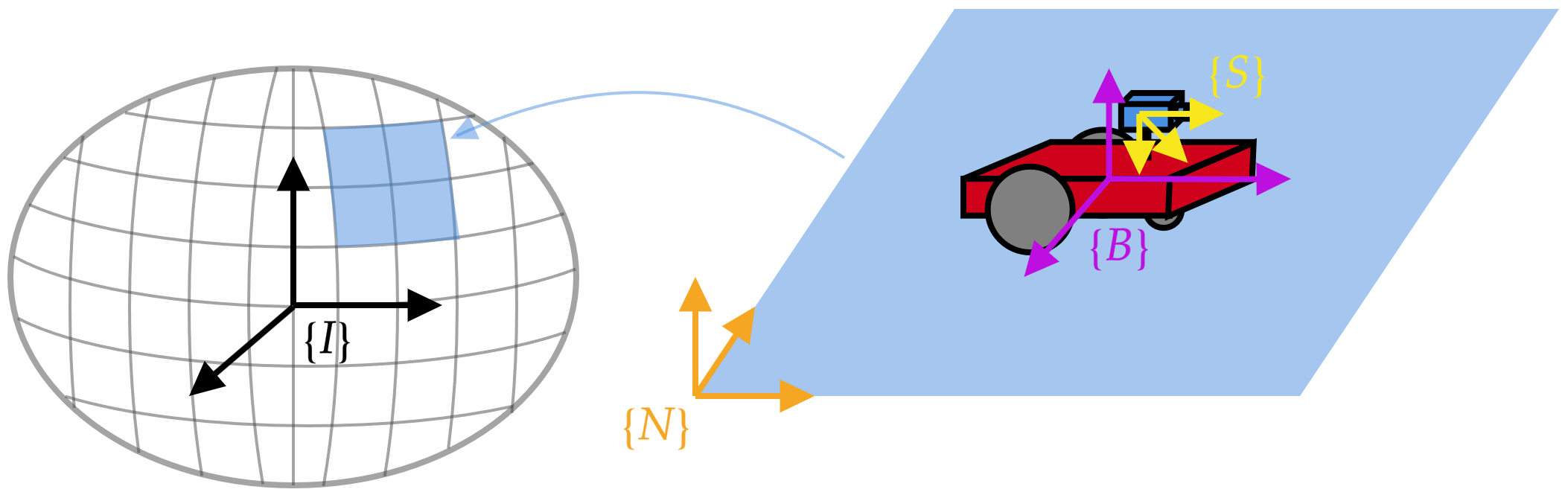
\(\{I\}\) - marco inercial (fijo)
\(\{N\}\) - marco de navegación (fijo y plano)
Marcos de navegación
\(\{B\}\) - marco del robot (móvil)
\(\{S\}\) - marco del sensor (fijo respecto al robot)
Marcos de navegación
\(\{B\}\) - marco del robot (móvil)
\(\{S\}\) - marco del sensor (fijo respecto al robot)
seguimos enfatizando percepción
Marcos de navegación
\(\{B\}\) - marco del robot (móvil)
\(\{S\}\) - marco del sensor (fijo respecto al robot)
seguimos enfatizando percepción
identificaremos dos tipos de sensores:
propioceptivos y exteroceptivos
Sensores propioceptivos
con respecto a \(\{B\}\) o \(\{S\}\)
miden cantidades internas al robot
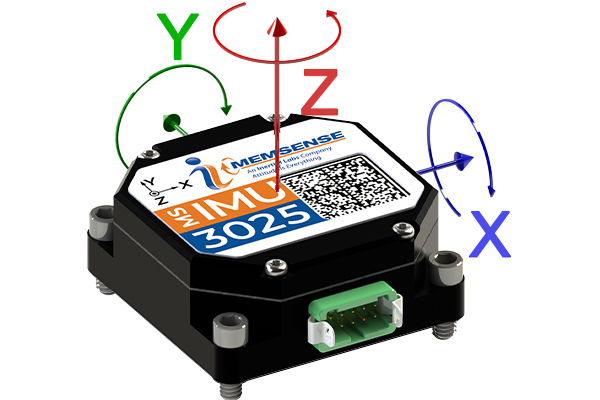



acelerómetros*
giroscopios
encoders
Sensores exteroceptivos
con respecto a \(\{N\}\) o \(\{I\}\)
miden cantidades del entorno, externas al robot


altímetro (barómetro)
brújula (magnetómetro)

el tipo de algunos sensores depende del contexto o la función | algoritmo que ejecuten

propioceptivo si, por ejemplo, se está empleando un algoritmo de odometría visual para localización
exteroceptivo si, por ejemplo, se está detectando la pose de algún landmark mediante features o fiducial markers
se buscará que el sistema de percepción del robot presente ambos tipos de sensores
¿Por qué?
se buscará que el sistema de percepción del robot presente ambos tipos de sensores
los propioceptivos presentan mediciones rápidas, buenas a corto plazo
¿Por qué? Por lo general:
los exteroceptivos presentan mediciones lentas, buenas a largo plazo
se buscará que el sistema de percepción del robot presente ambos tipos de sensores
los propioceptivos presentan mediciones rápidas, buenas a corto plazo
¿Por qué? Por lo general:
buena precisión pero mala exactitud (high bias low variance)
se buscará que el sistema de percepción del robot presente ambos tipos de sensores
¿Por qué? Por lo general:
los exteroceptivos presentan mediciones lentas, buenas a largo plazo
buena exactitud pero mala precisión (low bias high variance)

propioceptivo
exteroceptivo
propioceptivo
exteroceptivo
ideal
pero encontrar un único sensor con estas características es raro o muy caro, por lo que se optará por combinar múltiples sensores
fusión de sensores
Por lo tanto, el problema de localización corresponde a uno de estimación de pose (estado) mediante fusión de sensores [+ mapeo]
¿Por qué fusión de sensores?
la perspectiva detrás de la fusión de sensores nos dice que dos sensores malos siempre serán mejor que un único sensor (por bueno que sea)
¿Por qué fusión de sensores?
la perspectiva detrás de la fusión de sensores nos dice que dos sensores malos siempre serán mejor que un único sensor (por bueno que sea)
¿Por qué?
>> mt3006_clase10_fusion_de_sensores.mlx
Una idea simple
sensores exteroceptivos \(\to\) buenos a largo plazo
\(\to\) bajo bias
sensores propioceptivos \(\to\) buenos a corto plazo
\(\to\) baja varianza
Una idea simple
sensores exteroceptivos \(\to\) buenos a largo plazo
\(\to\) bajo bias \(\Rightarrow\) "buen" contenido de baja frecuencia
sensores propioceptivos \(\to\) buenos a corto plazo
\(\to\) baja varianza \(\Rightarrow\) "buen" contenido de alta frecuencia
Una idea simple
sensores exteroceptivos \(\to\) buenos a largo plazo
\(\to\) bajo bias \(\Rightarrow\) "buen" contenido de baja frecuencia
sensores propioceptivos \(\to\) buenos a corto plazo
\(\to\) baja varianza \(\Rightarrow\) "buen" contenido de alta frecuencia
se extraen las bajas frecuencias de un exteroceptivo y se combinan con las altas de un propioceptivo
(siempre y cuando ambos sensores estén midiendo la misma cantidad)
Una idea simple
H_{LPF}(z)
H_{HPF}(z)
x_\mathrm{propio}
x_\mathrm{extero}
x_\mathrm{fused}
+
El filtro complementario
siempre y cuando \(H_{LPF}(z)+H_{HPF}(z)=1\)
H_{LPF}(z)
H_{HPF}(z)
x_\mathrm{propio}
x_\mathrm{extero}
x_\mathrm{fused}
+
El filtro complementario "típico"
>> mt3006_clase10_fusion_de_sensores.mlx
\lambda(1-z^{-1})
1-\lambda
x_\mathrm{propio}
x_\mathrm{extero}
x_\mathrm{fused}
+
\dfrac{1}{1-\lambda z^{-1}}
Referencias
- MT3006 - Localización y mapeo en robótica móvil.pdf
- Kok et. al, Using Inertial Sensors for Position and Orientation Estimation.
MT3006 - Lecture 10 (2024)
By Miguel Enrique Zea Arenales



