Telescope status update
The CHARA Science Meeting 2023
nic scott
Telescope Systems Scientist










- Recoating moving to "as-needed" basis
- New operating limits
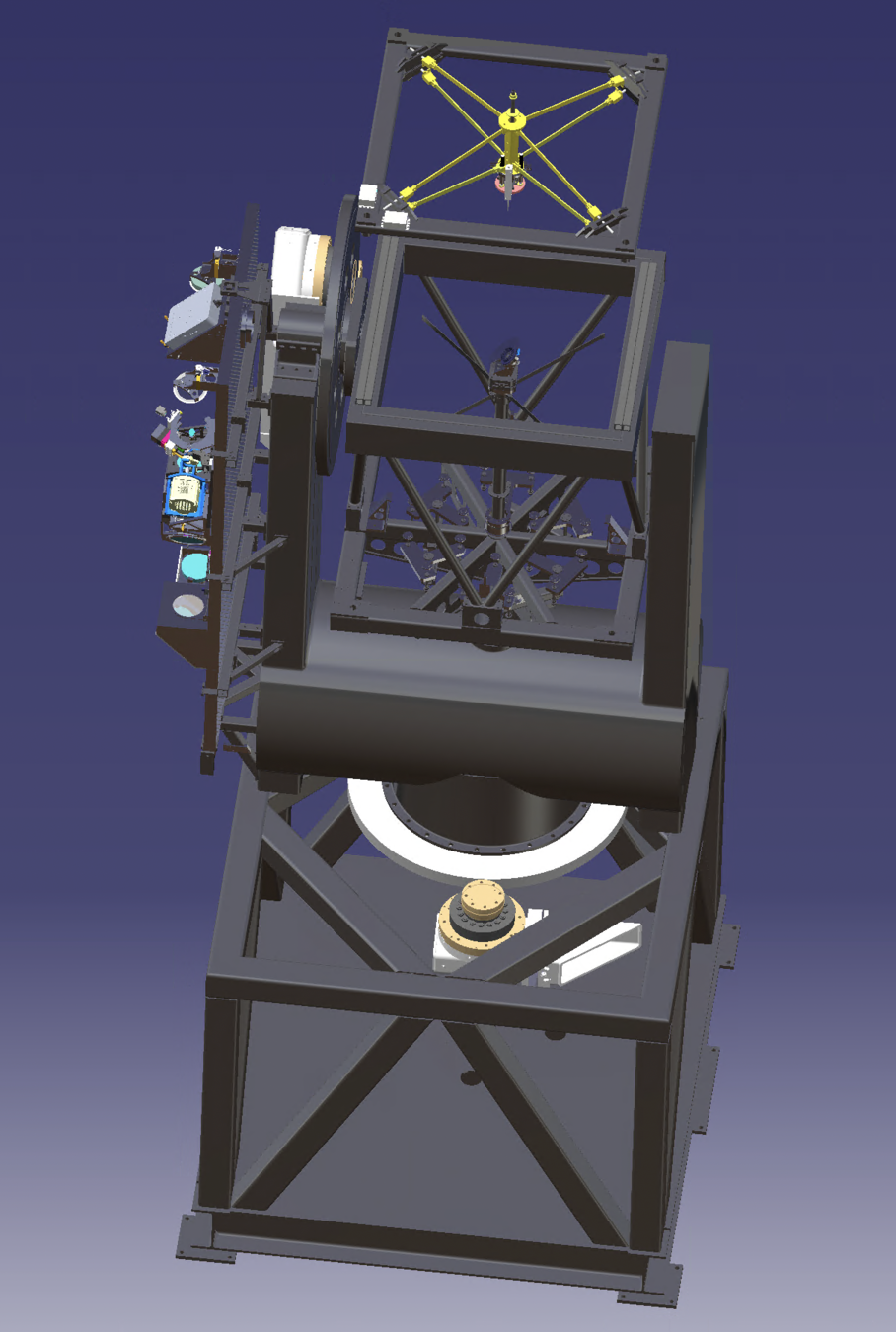
- Telescope drive upgrade
- Mobile Telescope Enclosure
| cutoff temp (°C) | avg % lost | avg hours lost |
|---|---|---|
| 0 | 0.1 | 7.0 |
| 2 | 0.4 | 25.2 |
| 4 | 1.3 | 93.1 |

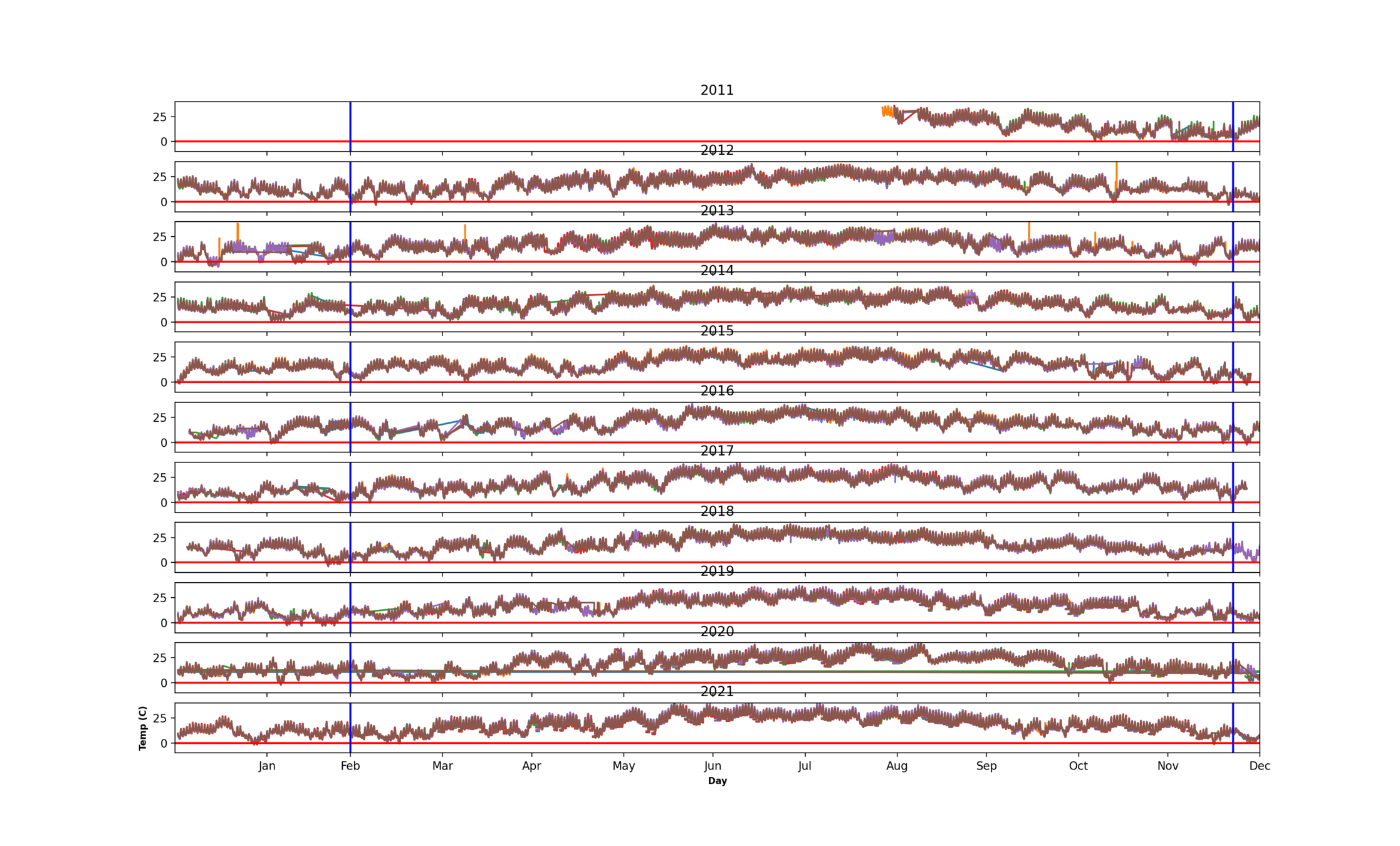
Temperature limits
Drive upgrade project
- Existing drives are ~25 years old & discontinued
- Reduce vibration, improve tuning
Mid-Scale Innovations Program (MSIP) replace the existing motors and drives
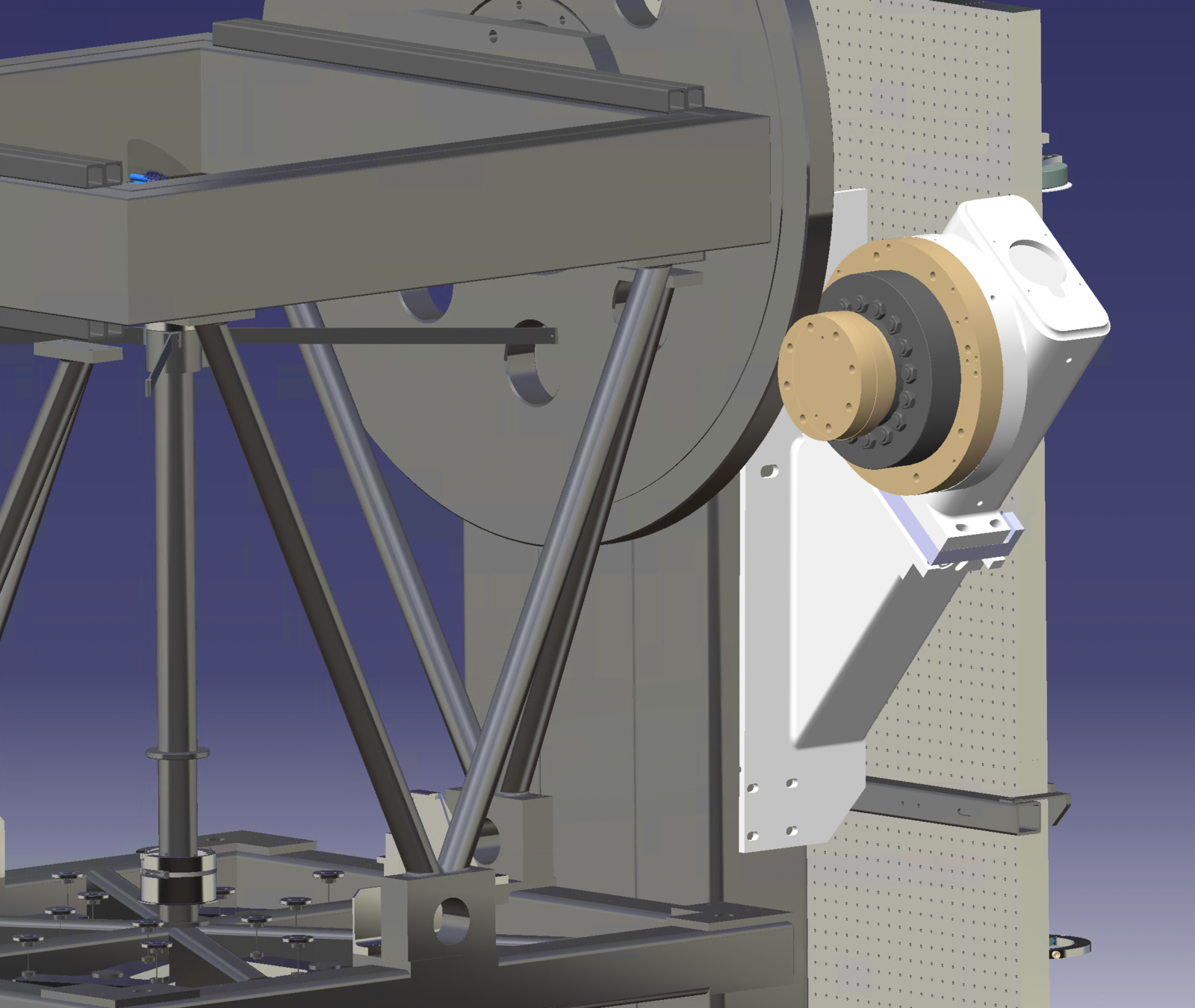
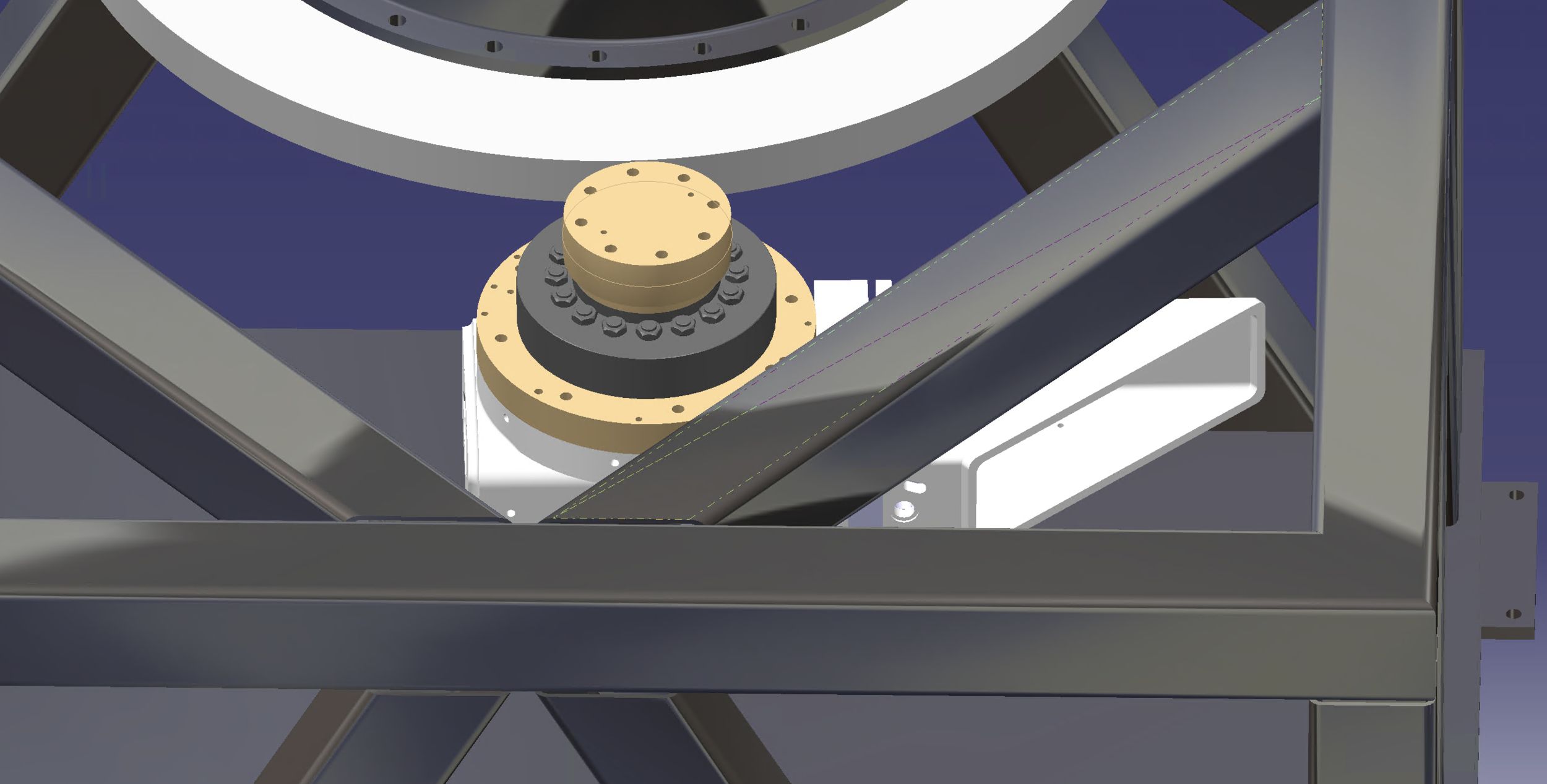
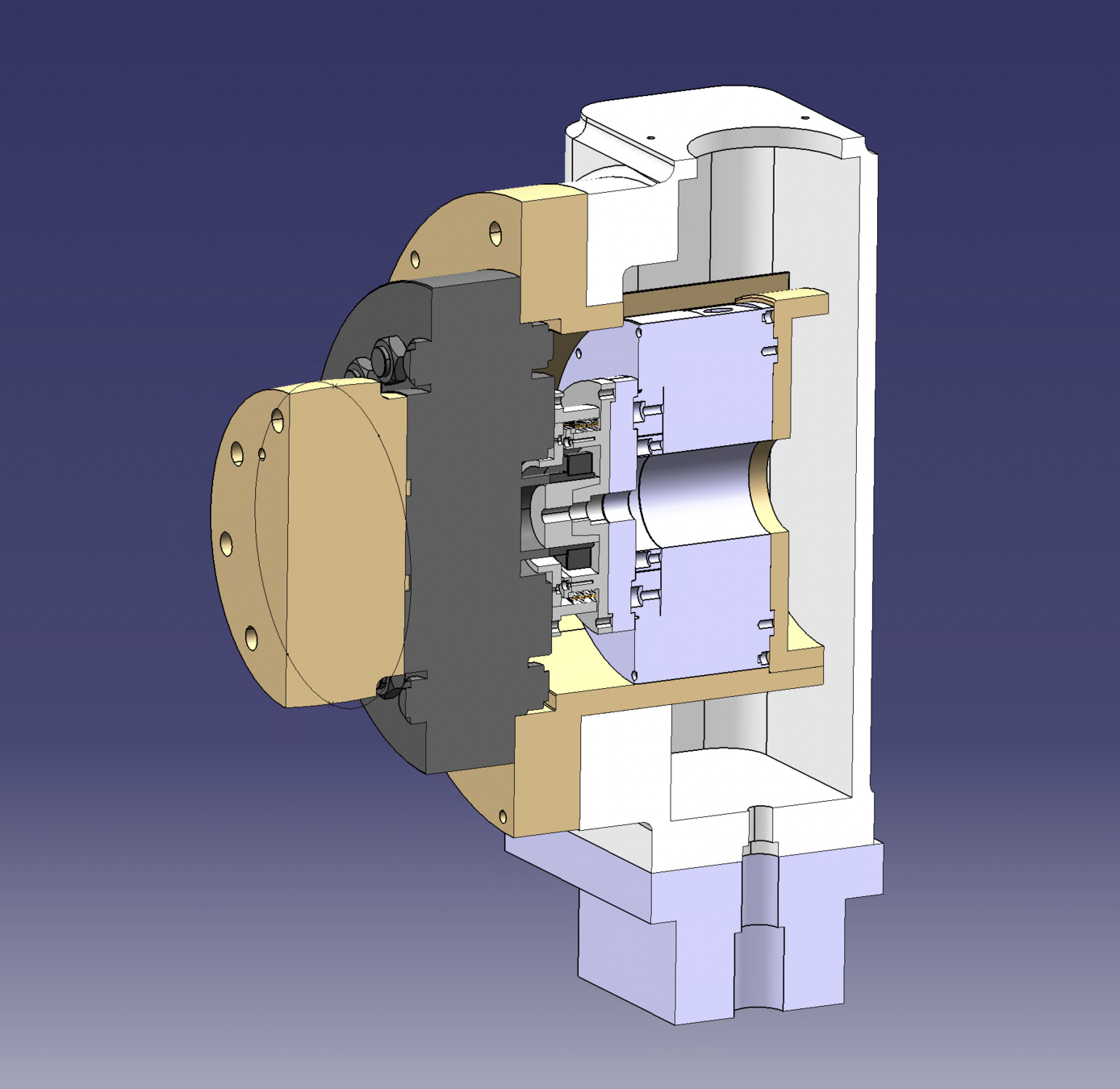

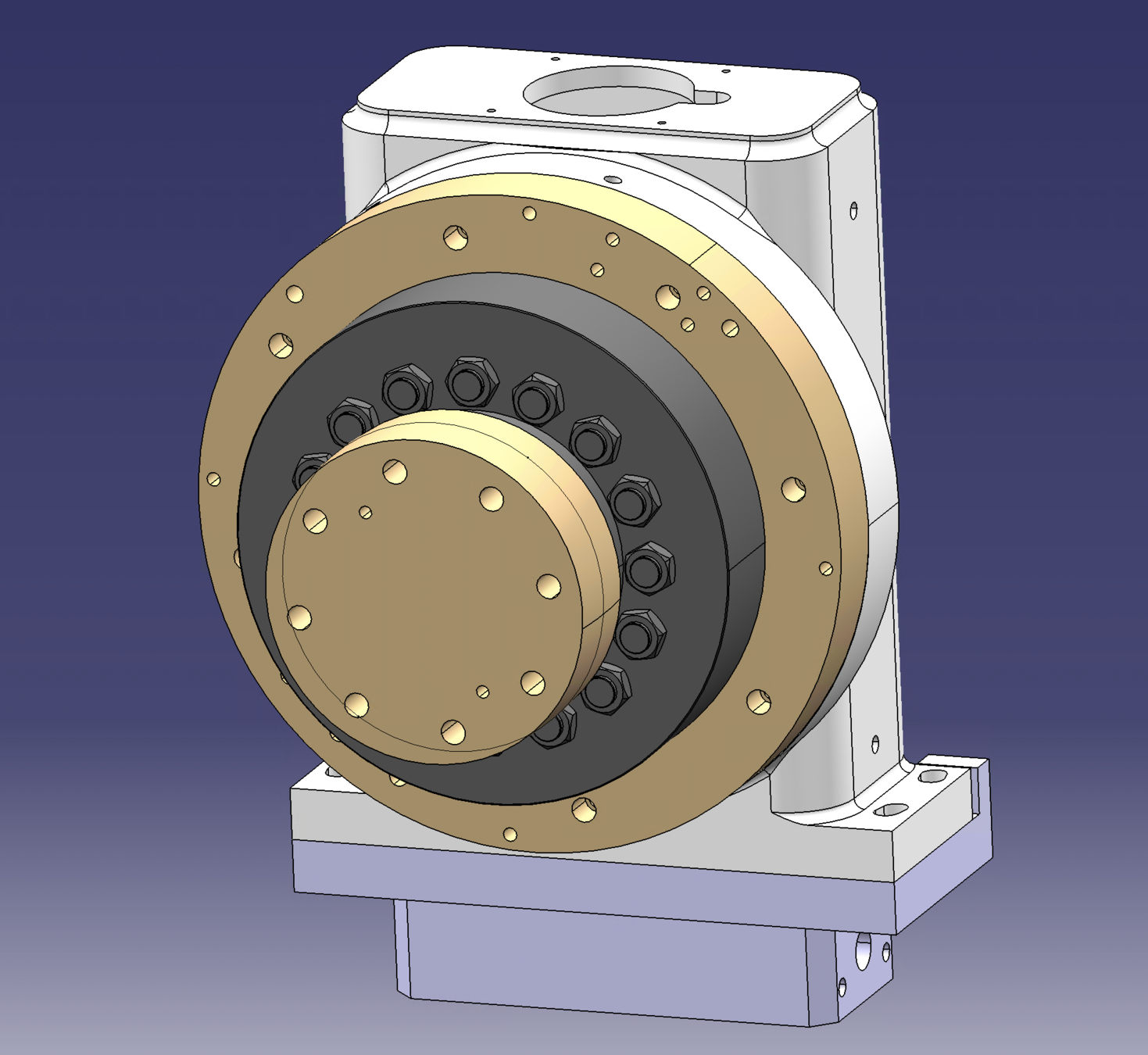
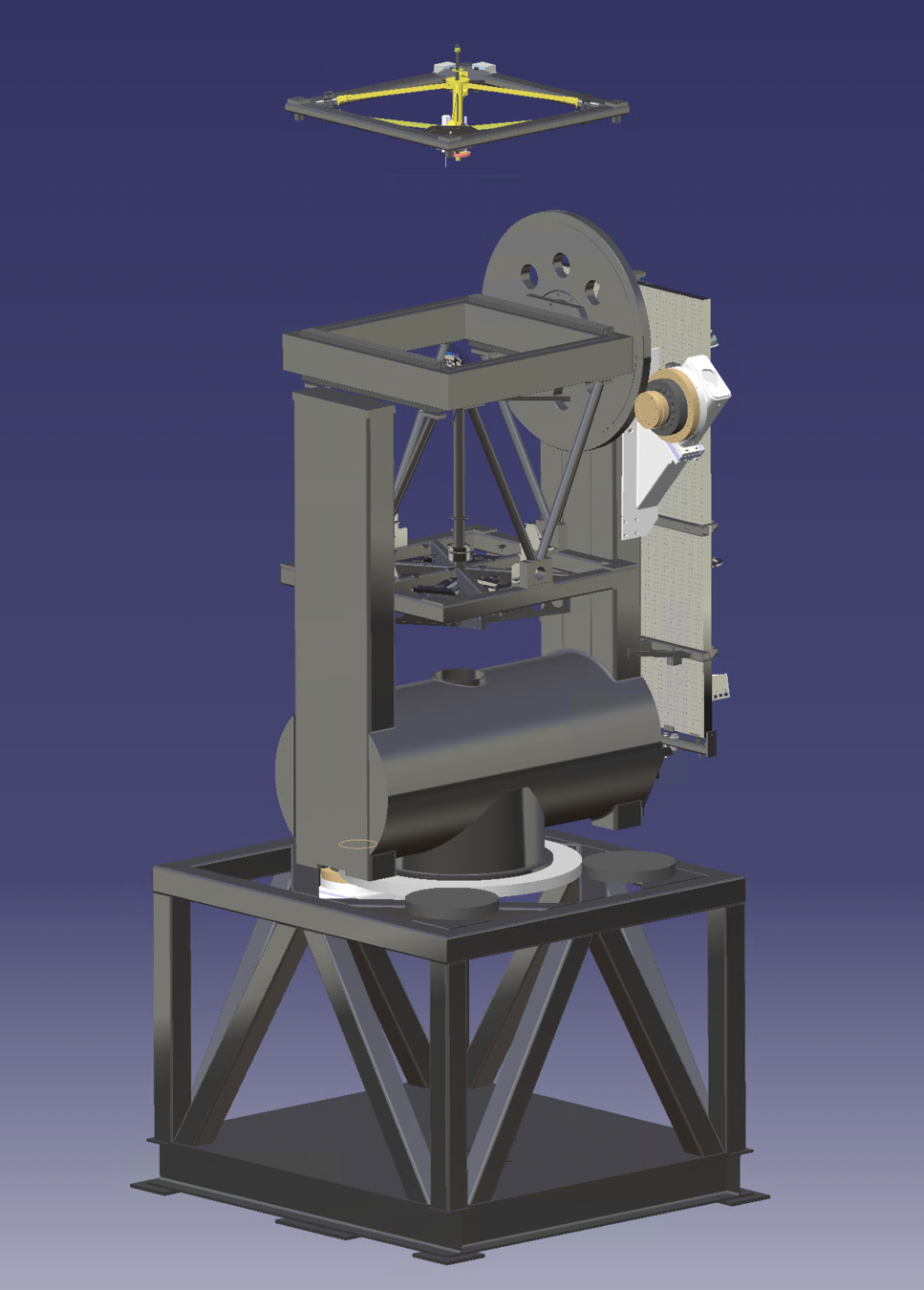
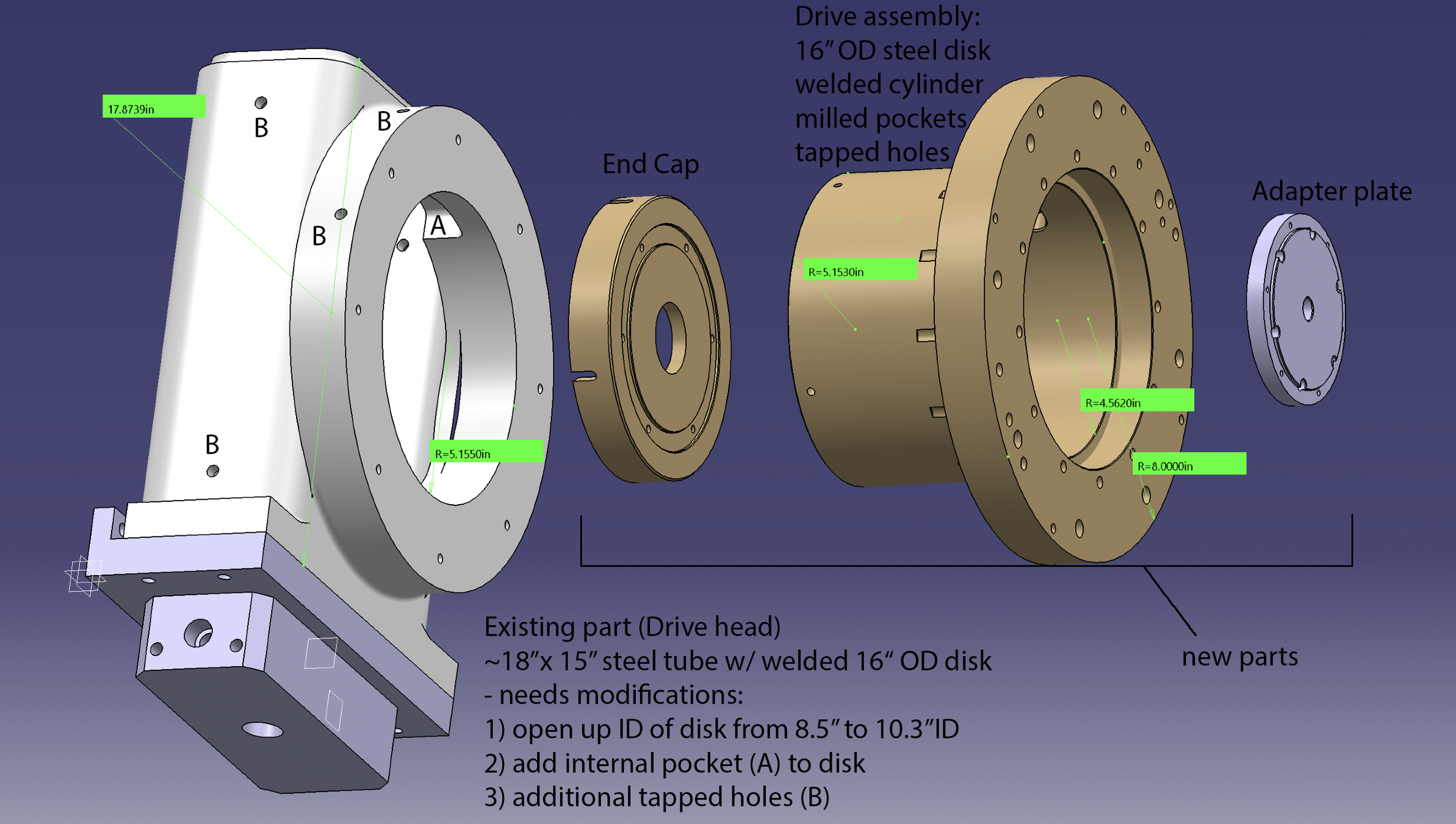
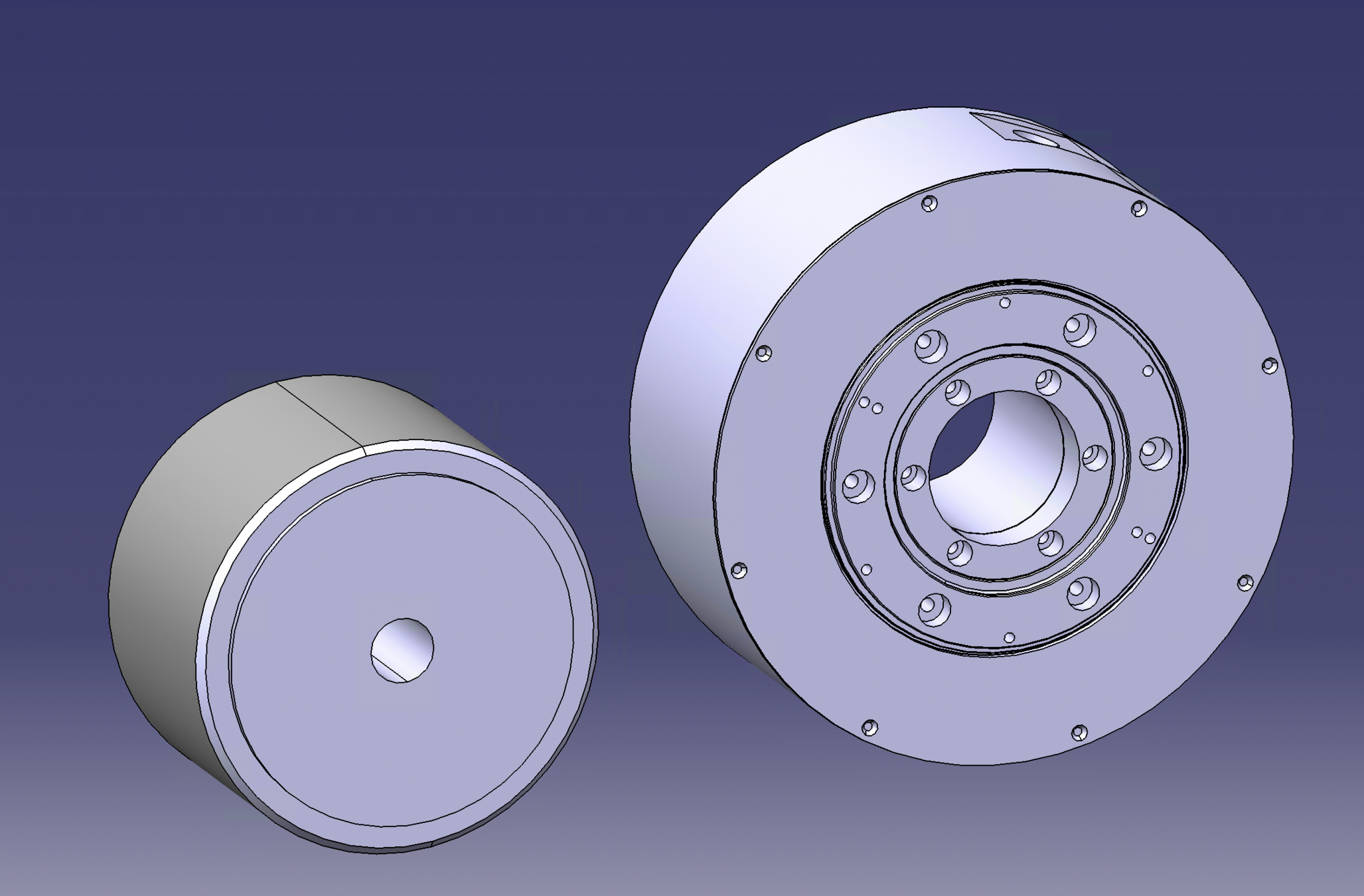
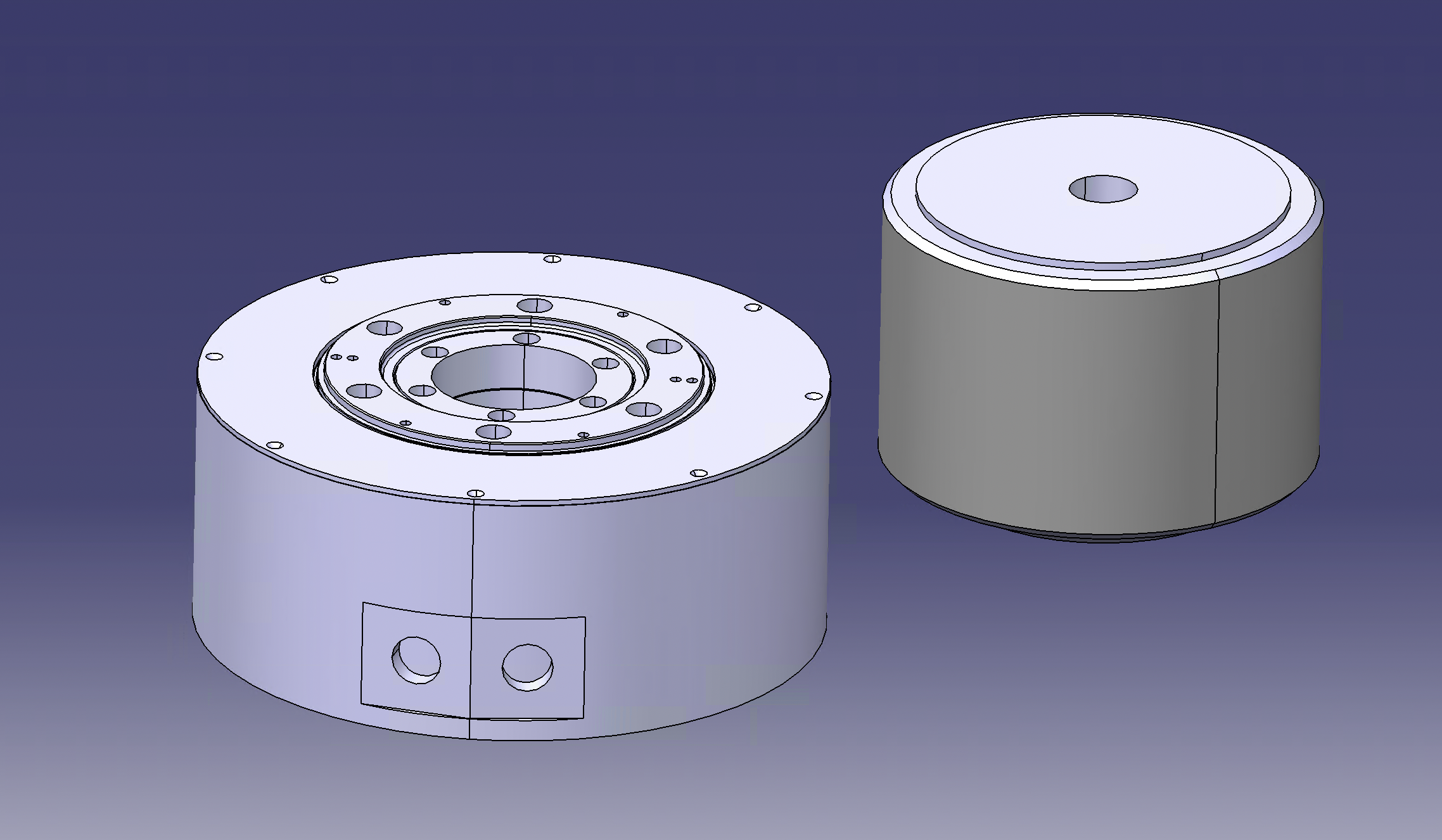
Drive Upgrade - Hardware
- One prototype assembly and short pivot arm made by UCryo
- Adapter plate made by GSU
- 2 drives and motors in hand from Parker
- S2 EL drive assembly removed and reinstalled
- modifications made to mount to aid removal
- Found problem with currently used bearing-old motor (unrelated to upgrade)
- re-machined and built a spare at GSU shop
- Spare Dojen ordered
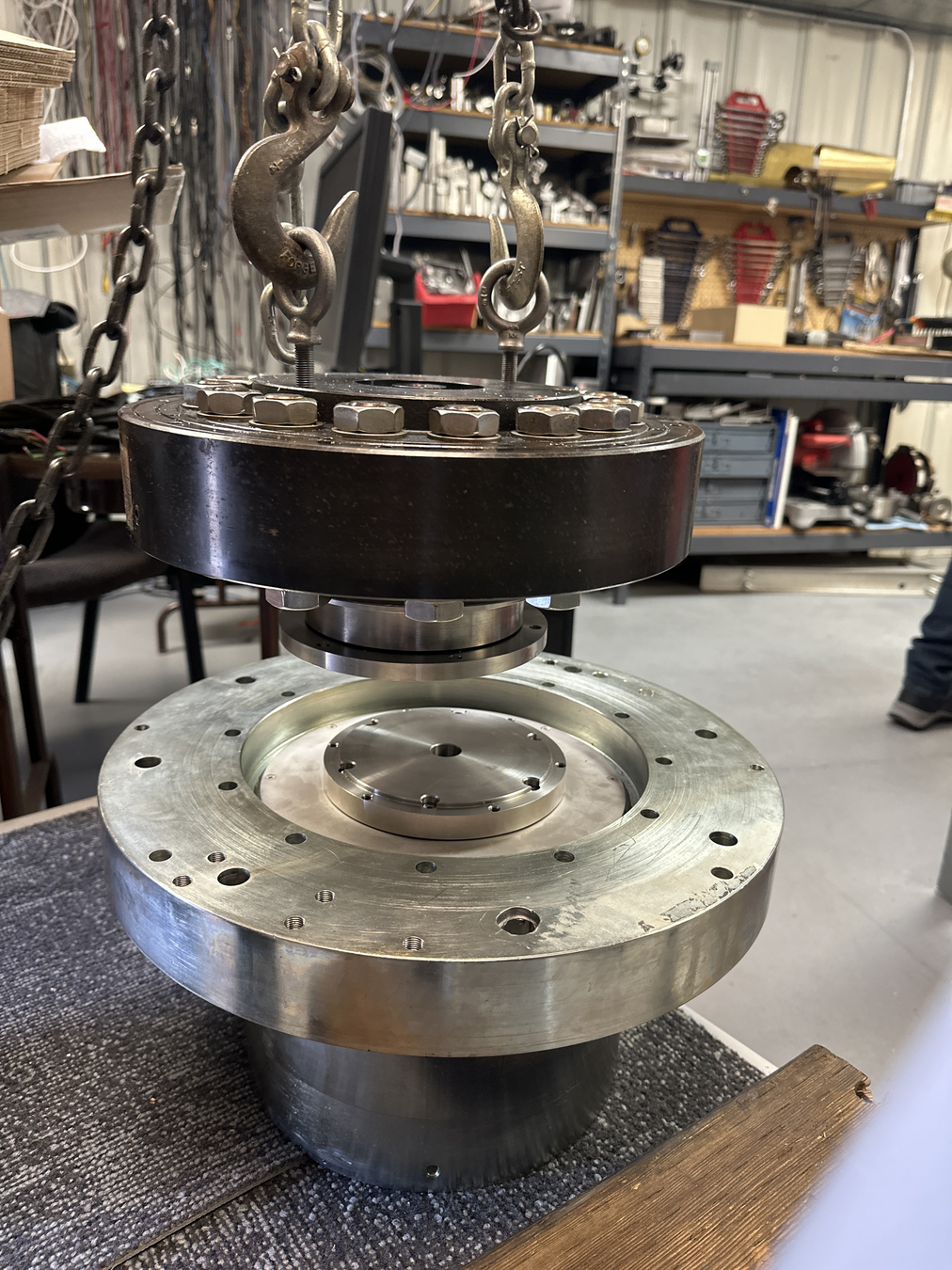
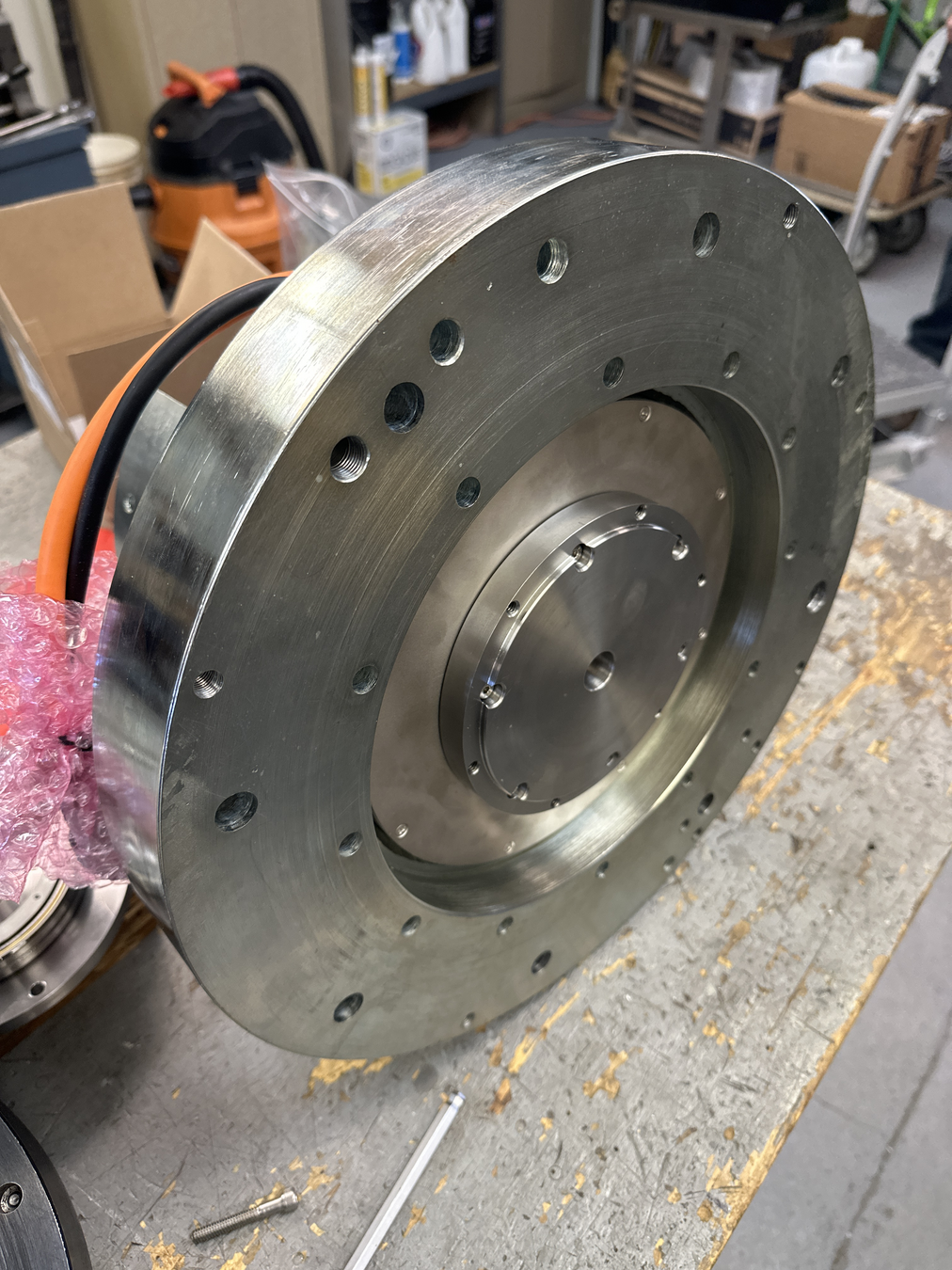
- Test fit the new motor and entire assembly
- procedure documented
- found some manufacture issues with prototype drive assembly
- re-machined and re-plated in Tucson
- Hardware now ready for EL install
- Install can be completed during daytime without impacting observing
- Next hardware challenge is AZ motor removal procedure










Drive Upgrade - Software
Two modes:
- Pulsed velocity control
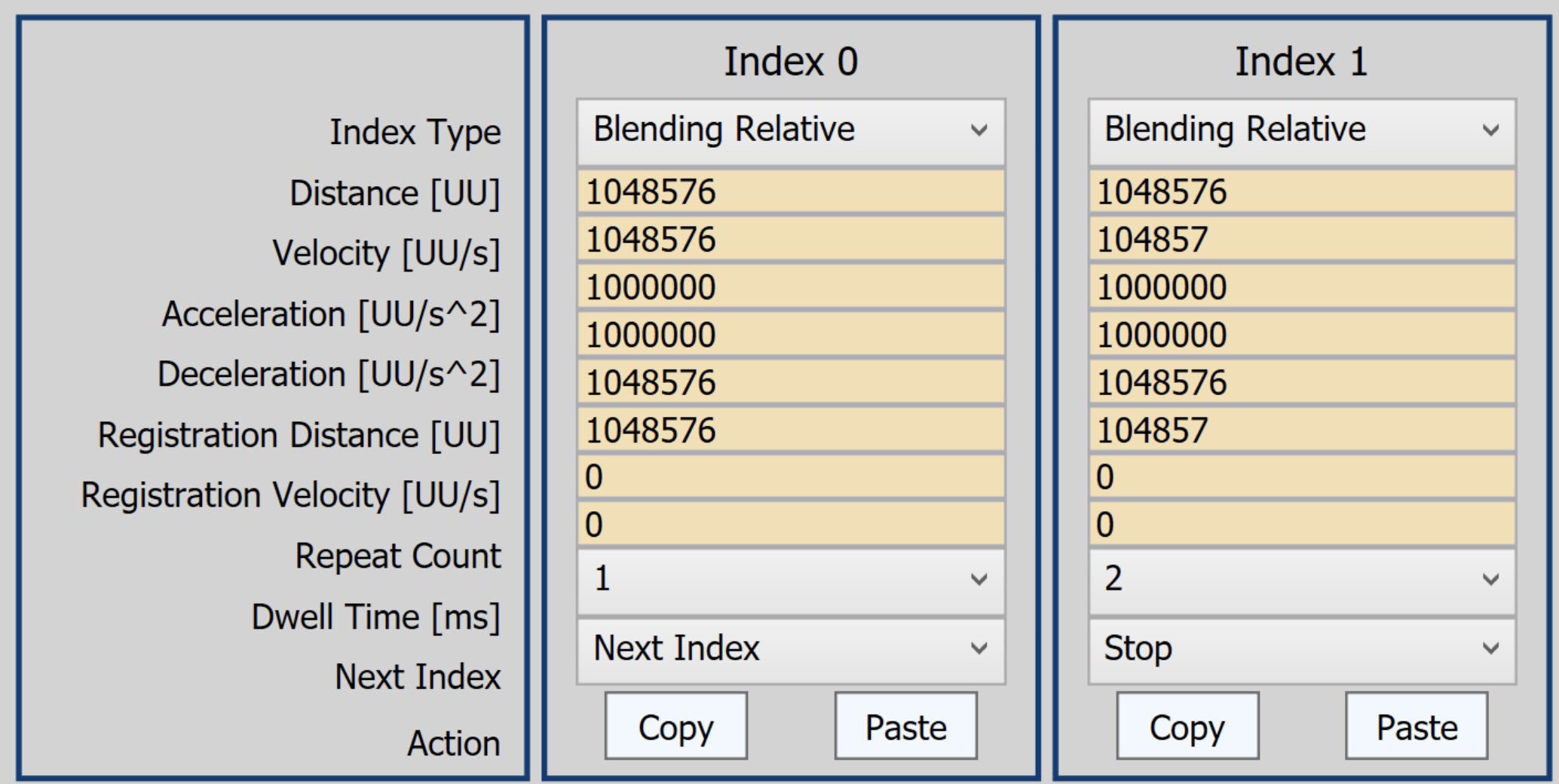
- Indexed movement
Old drives use software to control a pulse generator to control the drives
New drives can operate in this mode, but it's not required. Index mode is more flexible.
Up to 64 indexes can be populated, each with distance, speed, acc, dec.
Indexes can be repeated, or cycled from one to the next.
Smooth transition between different velocities.
motor capable of 200rpm, ~7.7 scope deg/s
2deg/s ~ 52 motor rpm
Timeline

- New telescope drives and motors picked
- First drive purchased -Dec 2021
- New drive housing assembly designed
- Bids secured, final decision pending
- Build one complete assembly from stock
- Test drive for month(s)
- Replace each drive in succession, with the removed drive assembly being sent for modification
- Repeat 11x



Desires for the new system:
-
Minimize Failure points - Eliminate custom parts, circuits, and cabling as much as possible.
-
Minimize Comms issues - Replace custom cabling with system that utilizes dome ethernet and/or wifi.
-
Modularity/longevity - Ideal would be identical common, well-supported microcontrollers with many spares, flash them with the appropriate software.
-
Parallel operation - Multiple mirror axis/motors/covers could be commanded simultaneously (or at least buffered).
-
Internet control and local operation - web-based log/debugging
-
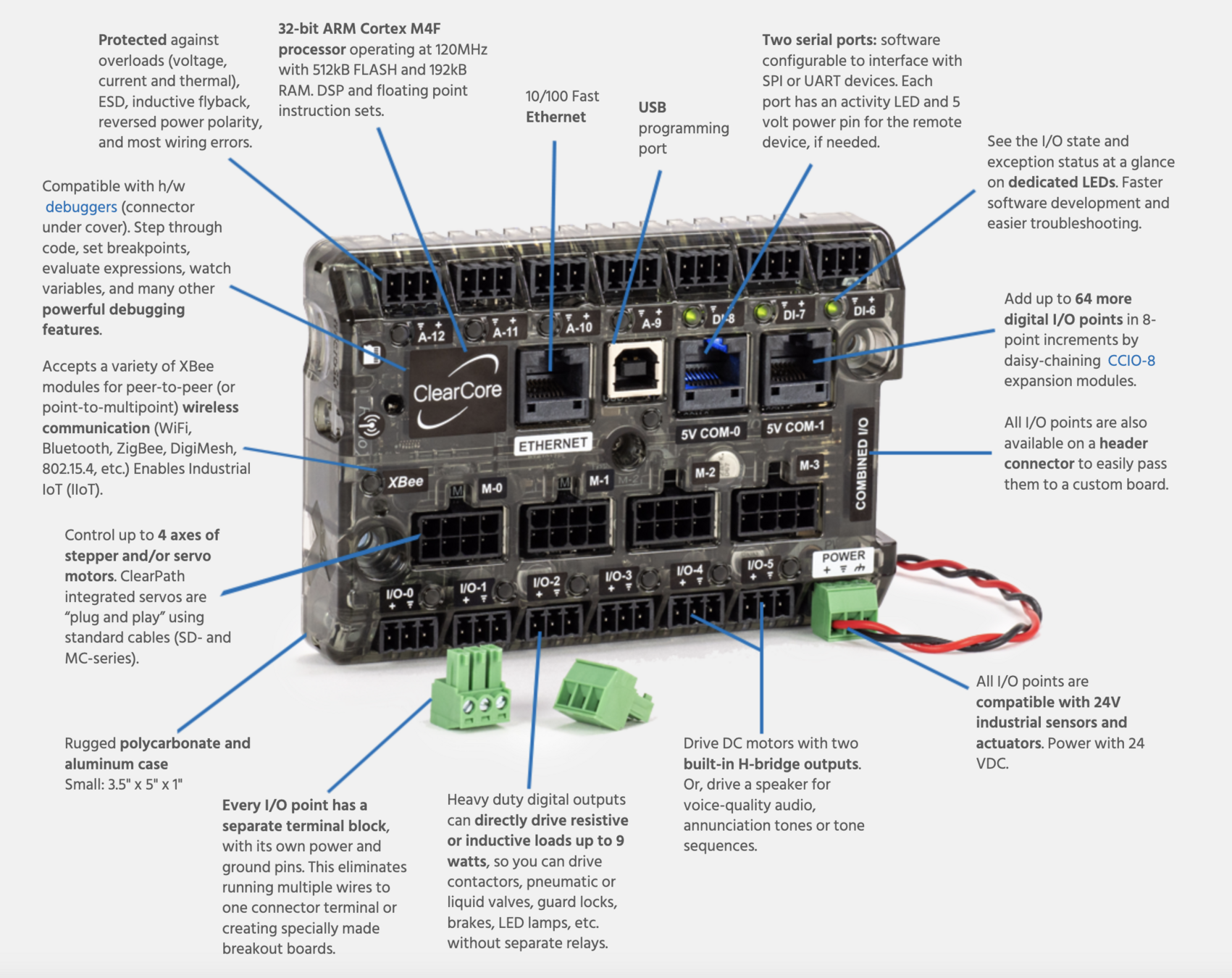
Code - Arduino C++, RPi Firmata control
-


Industrial RPi+Arduino based system

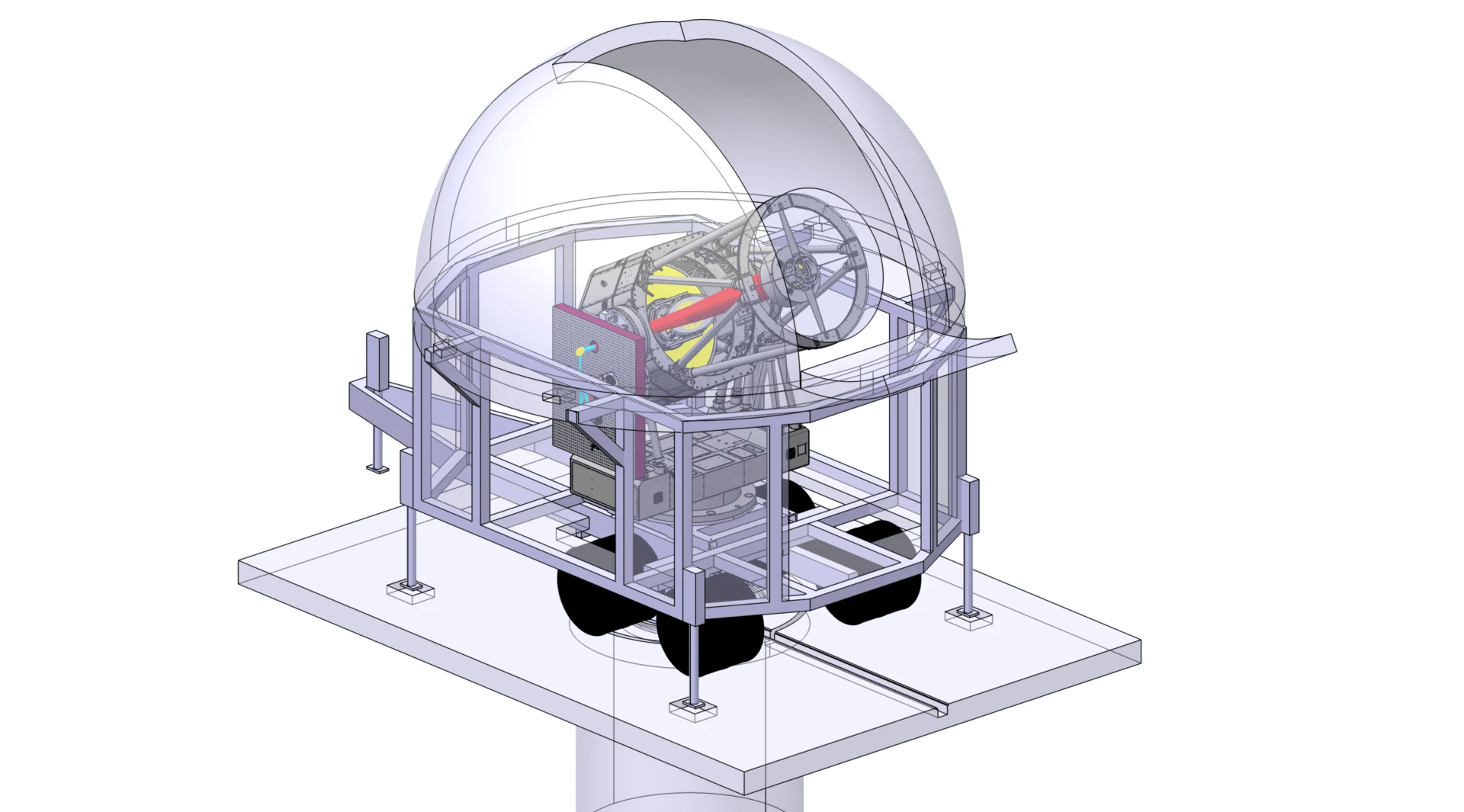
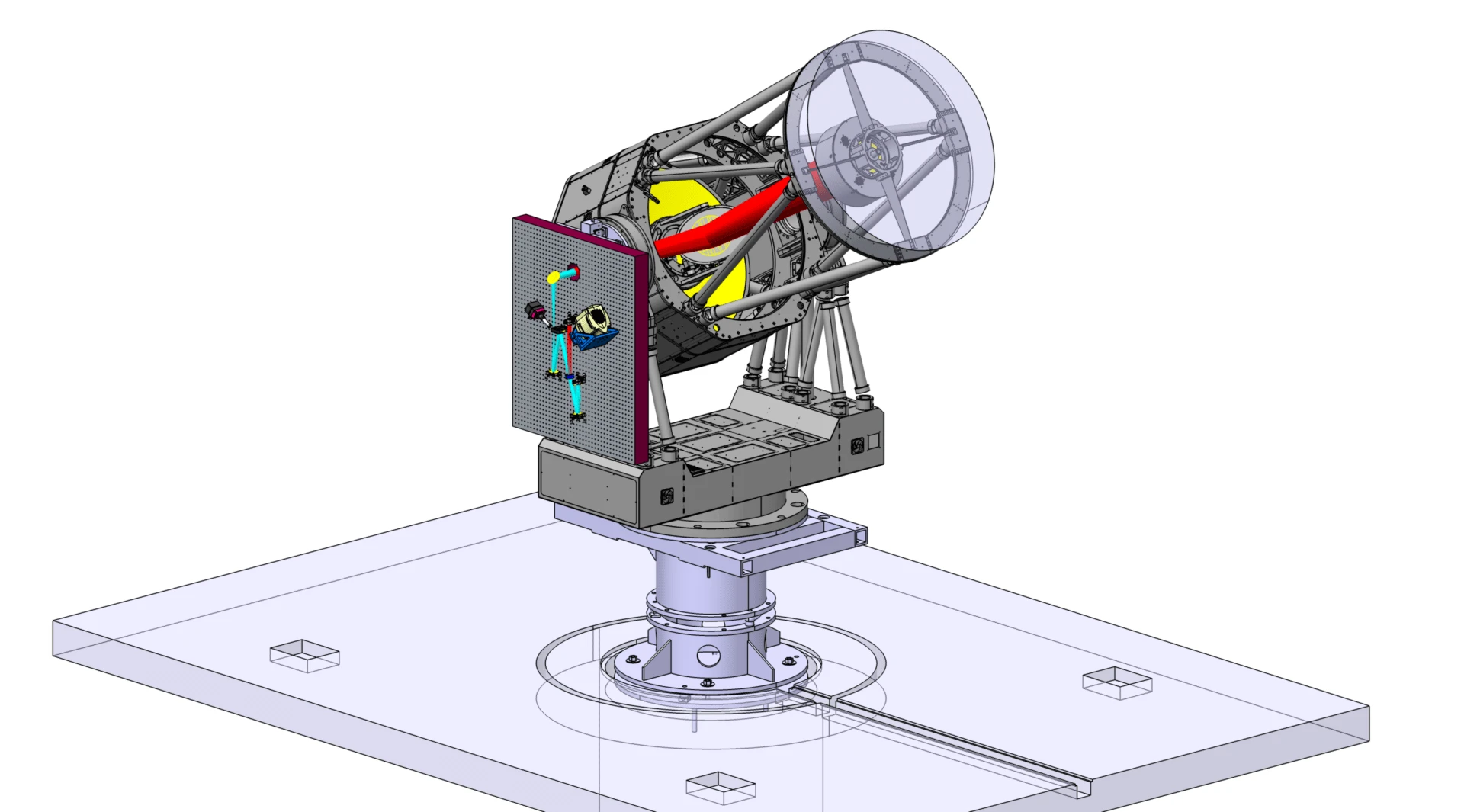
Mobile Telescope Transport (TR116)
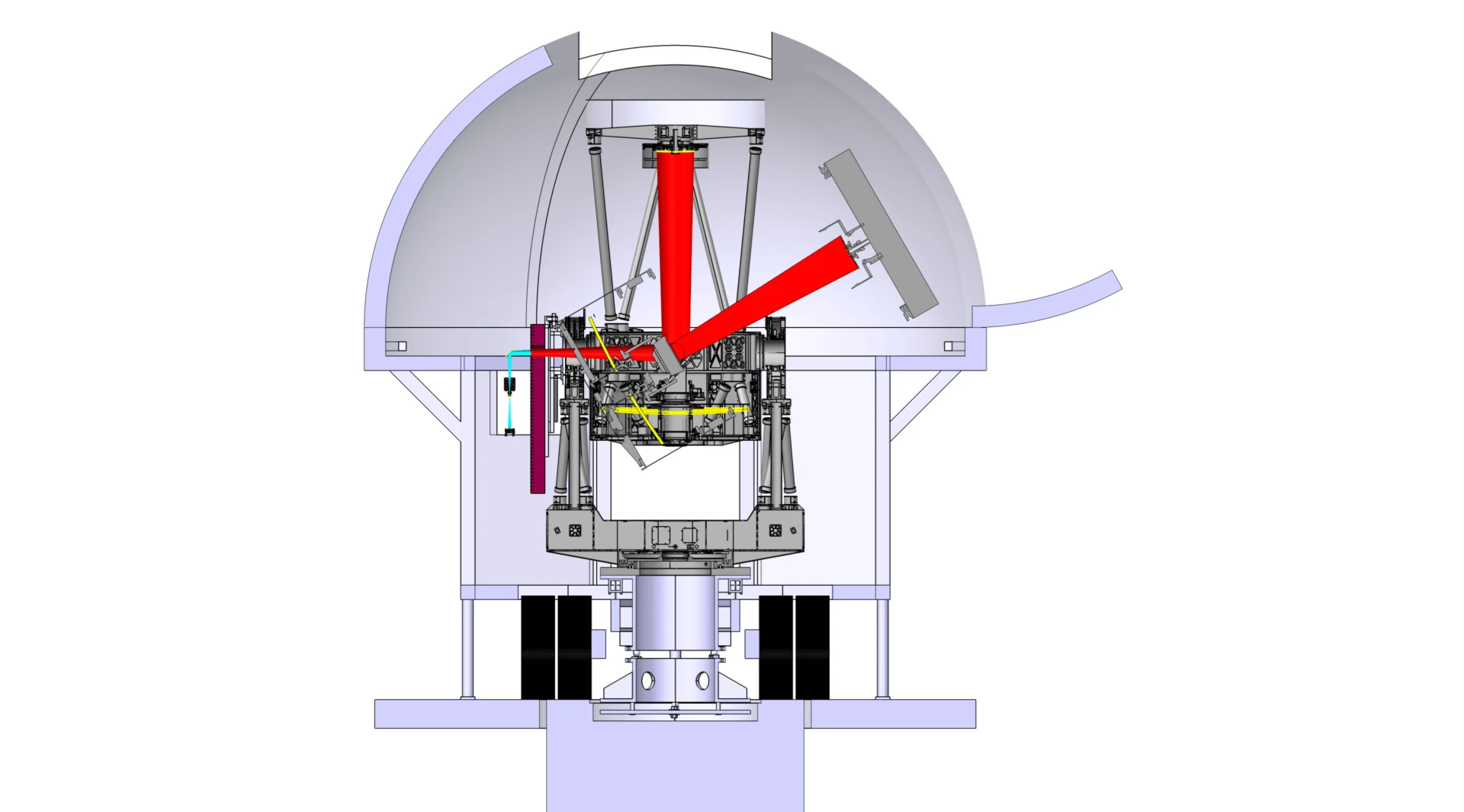
-
Ash dome
- Wide 54” shutter
- A raised dome horizon/skirt
- Heavier gauge track
-
A rolled dome mount ring
- Continuous dome mount connection to maintain concentricity.
- Dimensionally more stable during transport
-
Removable cross bar alternative:
- Lateral/dimensional rigidity provided by dome ring.
-
Lifting of the telescope via synchronized linear actuators instead of hoists in order to provide
- coordinated, repeatable, level-lifting
- 4 – 7,000N actuators (w/ 6” travel)
- Pair of removable wheel guide-rails/stops
- Trailer Tie-down: anchor points on trailer and slab for turnbuckle type tie-downs
- Telescope is expected Fall 2023.
- Dome expected Spring 2023.
- Preliminary design we have shown here and are in the process of mechanical analysis.
- SeaWest, UCryo for enclosure
- Currently upgrading trailer (paint, brakes, tires, etc)
- Fabrication of the enclosure should begin in Spring of 2023.
- Spring/Summer of 2023 the sites will be prepared.
-
Planewave:
- 2-3 yrs until a 2 meter
- $2.5 million ea
- > 2 magnitudes deeper
-
move existing telescopes to CMAP sites?
- 1m outriggers?
- 6x2m + 4x1m array? 45 baselines!
-
JWST plenary talk:
- “imaging interferometers are coming online”
-
How to get more hands at the Array/instrumentation interest
- REU options
- Shadow-a-Scientist programs
- Elliott Horch’s intensity interferometers - try at HLCO? https://ui.adsabs.harvard.edu/abs/2022AJ....163...92H%2F/abstract
-
Funding
- NSF wants astronomers to compete for MSIPs with MSRI funds
- Workshops on centers of excellence, partnerships with industry (TIP)
- Could chara get solar panel funding?
- Grow local and state politician interest/investment?
Some thoughts from AAS 241

other slides
| Peak Torque | Rated Torque | Rated Speed | Max Velocity | |
|---|---|---|---|---|
| (Nm) | (Nm) | rpm | rpm | |
| 1015B (existing) | 15 | 5 | 120 | |
| PM-DDD22 (new) | 66 | 22 | 200 | 400 |
Motor accuracy of ±30 arcsec with repeatability of ±1.3 arcsec. This is before the gear reduction, current setup gets <10 arcsec after gearing
The P series direct drive have higher resolution absolute encoders so the system should be even better than the older Dynaserv series.
Altitude: 2300 kg-m²
Load inertia = 2300/(24*6.5)² = 0.0945 kg-m²
Existing motor inertia = 120 kg-m² x 10-4
New motor inertia = 57 kg-m² x 10-4
Existing inertia ratio = 7.9:1
New inertia ratio = 16.5:1
Azimuth: 11,000 – 13,400 kg-m² = kg-m²
Load inertia = 13,400/(24*6.5)² = 0.551 kg-m²
Existing motor inertia = 120 kg-m² x 10-4
New motor inertia = 57 kg-m² x 10-4
Existing inertia ratio = 45.9:1
New inertia ratio = 96:1
Ideal inertia ratio is 10:1 or less
Based on Parker’s calculation, this motor has an ratio of 96:1 on the azimuth axis. But since your gear ratios are high and speeds are very low, the inertia ratio of less than 100:1 should be sufficient.
CHARA meeting 2023
By Nic Scott




