

Clayton Shonkwiler PRO
Mathematician and artist
/kc24
this talk!
SIAM Minisymposium on Interactions Among Analysis, Optimization, and Network Science
October 5, 2024
Florida State University
National Science Foundation (DMS–2107700)
Definition.
\(A \in \mathbb{C}^{d \times d}\) is normal if \(AA^\ast = A^\ast A\).
Equivalently,
\(0 = AA^\ast - A^\ast A = [A,A^\ast]\).
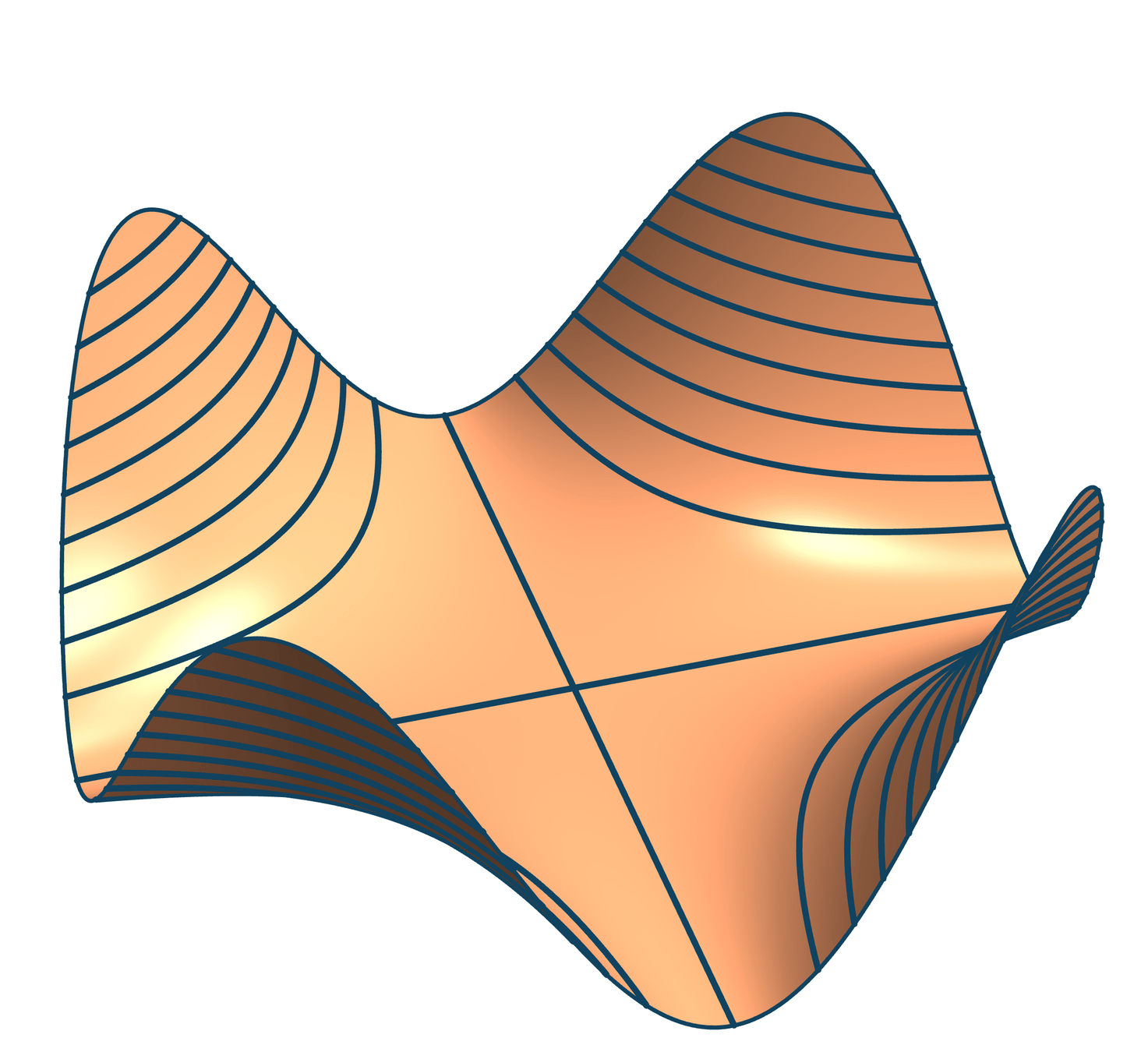
Define the non-normal energy \(\operatorname{E}:\mathbb{C}^{d \times d} \to \mathbb{R}\) by
\(\operatorname{E}(A) := \|[A,A^\ast]\|^2.\)
Obvious Fact.
The normal matrices are the global minima of \(\operatorname{E}\).
Theorem [with Needham]
The only critical points of \(\operatorname{E}\) are the global minima; i.e., the normal matrices.
\(\operatorname{E}\) is not quasiconvex!
Theorem [with Needham]
The only critical points of \(\operatorname{E}\) are the global minima; i.e., the normal matrices.
Let \(\mathcal{F}: \mathbb{C}^{d \times d} \times \mathbb{R} \to \mathbb{C}^{d \times d}\) be negative gradient descent of \(\operatorname{E}\); i.e.,
\(\mathcal{F}(A_0,0) = A_0 \qquad \frac{d}{dt}\mathcal{F}(A_0,t) = -\nabla \operatorname{E}(\mathcal{F}(A_0,t))\).
Theorem [with Needham]
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathcal{F}(A_0,t)\) exists, is normal, has the same eigenvalues as \(A_0\), and is real if \(A_0\) is.
\(\mathbb{C}^{d \times d}\) is symplectic, with symplectic form \(\omega_A(X,Y) = -\mathrm{Im}\langle X,Y \rangle = -\mathrm{Im}\mathrm{Tr}(Y^\ast X)\).
A symplectic manifold is a smooth manifold \(M\) together with a closed, non-degenerate 2-form \(\omega \in \Omega^2(M)\).
Example: \((\mathbb{R}^2,dx \wedge dy) = (\mathbb{C},\frac{i}{2}dz \wedge d\bar{z})\)
\(\mathbb{C}^{d \times d}\) is symplectic, with symplectic form \(\omega_A(X,Y) = -\mathrm{Im}\langle X,Y \rangle = -\mathrm{Im}\mathrm{Tr}(Y^\ast X)\).
Consider the conjugation action of \(\operatorname{SU}(d)\) on \(\mathbb{C}^{d \times d}\): \(U \cdot A = U A U^\ast\).
This action is Hamiltonian with associated momentum map \(\mu: \mathbb{C}^{d \times d} \to \mathscr{H}_0(d)\) given by
\(\mu(A) := [A,A^\ast]\).
So \(\operatorname{E}(A) = \|\mu(A)\|^2\).
Frances Kirwan
Gert-Martin Greuel [CC BY-SA 2.0 DE], from Oberwolfach Photo Collection
Image by rawpixel.com on Freepik
This kind of function is really nice!
The GIT quotient consists of group orbits which can be distinguished by \(G\)-invariant (homogeneous) polynomials.
\(\mathbb{C}^* \curvearrowright \mathbb{CP}^2\)
\(t \cdot [z_0:z_1:z_2] = [z_0: tz_1:\frac{1}{t}z_2]\)
Roughly: identify orbits whose closures intersect, throw away orbits on which all \(G\)-invariant polynomials vanish.
\( \mathbb{CP}^2/\!/\,\mathbb{C}^* \cong\mathbb{CP}^1\)
Let \(T \simeq \operatorname{U}(1)^{d-1}\) be the diagonal subgroup of \(\operatorname{SU}(d)\). The conjugation action of \(T\) on \(\mathbb{C}^{d \times d}\) is also Hamiltonian, with momentum map
\(A \mapsto \mathrm{diag}([A,A^\ast])\).
\([A,A^\ast]_{ii} = \|A_i\|^2 - \|A^i\|^2\), where \(A_i\) is the \(i\)th row of \(A\) and \(A^i\) is the \(i\)th column.
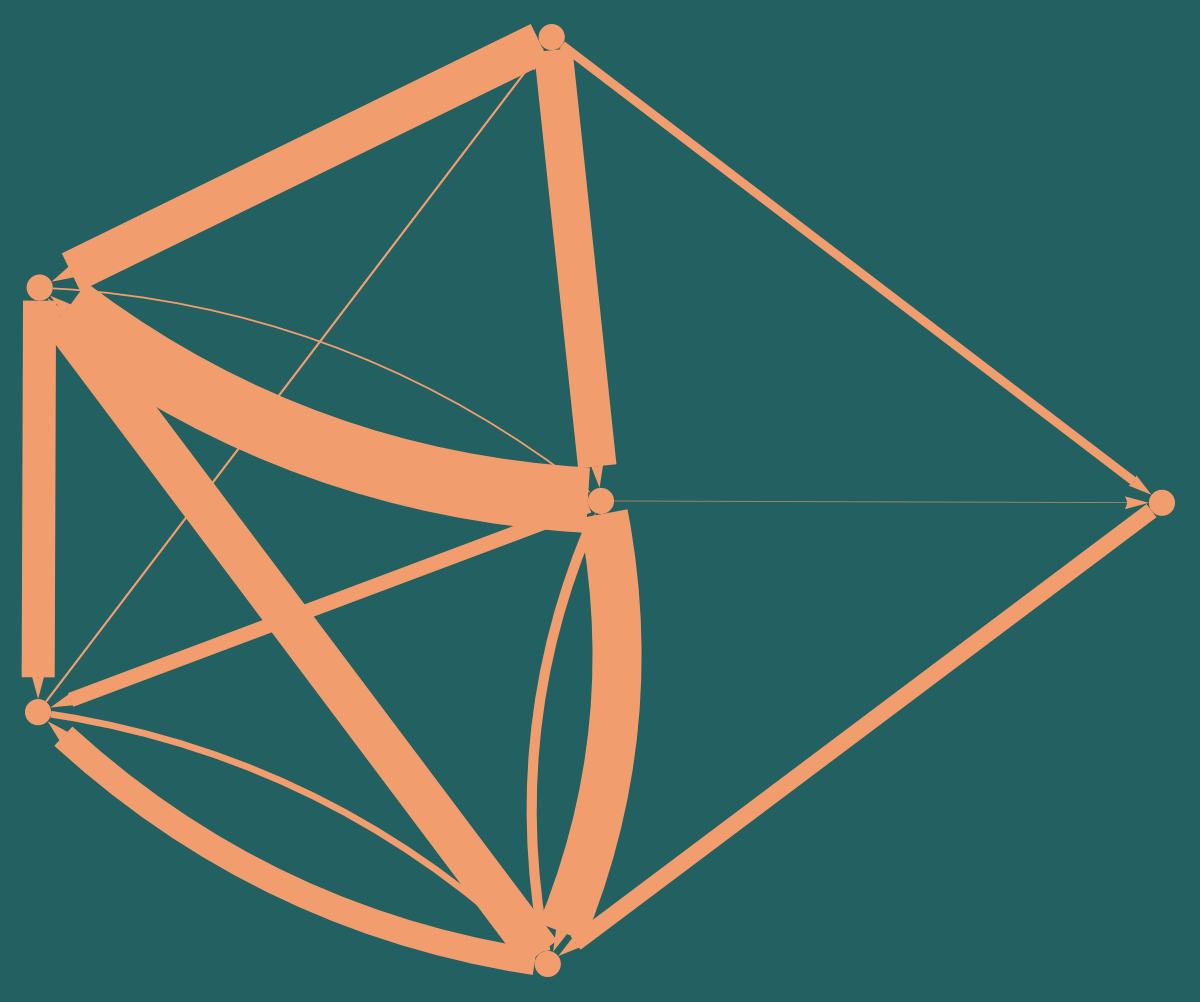
If \(A = \left(a_{ij}\right)_{i,j} \in \mathbb{R}^{d \times d}\) such that \(\mathrm{diag}([A,A^\ast]) = 0\), then \(\widehat{A} = \left(a_{ij}^2\right)_{i,j}\) is the adjacency matrix of a balanced multigraph.
Define the unbalanced energy \(\operatorname{B}(A) := \|\mathrm{diag}([A,A^\ast])\|^2 = \sum \left(\|A_i\|^2 - \|A^i\|^2\right)^2\).
Let \(\mathscr{F}(A_0,0) = A_0, \frac{d}{dt}\mathscr{F}(A_0,t) = - \nabla \operatorname{B}(\mathscr{F}(A_0,t))\) be negative gradient flow of \(\operatorname{B}\).
Theorem (with Needham)
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
This is “local”: \(a_{ij}\) is updated by a multiple of \((\|A_j\|^2-\|A^j\|^2)-(\|A_i\|^2-\|A^i\|^2)\).
Theorem (with Needham)
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Theorem (with Needham)
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Theorem (with Needham)
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
\(\|A\|^2=1\)
\(\|A\|^2=0.569\)
Theorem (with Needham)
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
Theorem (with Needham)
For any \(A_0 \in \mathbb{C}^{d \times d}\), the matrix \(A_\infty := \lim_{t \to \infty} \mathscr{F}(A_0,t)\) exists, is balanced, has the same eigenvalues and principal minors as \(A_0\), and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
By doing gradient flow \(\overline{\mathscr{F}}\) on the unit sphere, we can preserve weights:
Theorem (with Needham)
For any non-nilpotent \(A_0 \in \mathbb{C}^{d \times d}\) with \(\|A\|^2=1\), the matrix \(A_\infty := \lim_{t \to \infty} \overline{\mathscr{F}}(A_0,t)\) exists, is balanced, has Frobenius norm 1, and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
By doing gradient flow \(\overline{\mathscr{F}}\) on the unit sphere, we can preserve weights:
Theorem (with Needham)
For any non-nilpotent \(A_0 \in \mathbb{C}^{d \times d}\) with \(\|A\|^2=1\), the matrix \(A_\infty := \lim_{t \to \infty} \overline{\mathscr{F}}(A_0,t)\) exists, is balanced, has Frobenius norm 1, and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
By doing gradient flow \(\overline{\mathscr{F}}\) on the unit sphere, we can preserve weights:
Theorem (with Needham)
For any non-nilpotent \(A_0 \in \mathbb{C}^{d \times d}\) with \(\|A\|^2=1\), the matrix \(A_\infty := \lim_{t \to \infty} \overline{\mathscr{F}}(A_0,t)\) exists, is balanced, has Frobenius norm 1, and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
By doing gradient flow \(\overline{\mathscr{F}}\) on the unit sphere, we can preserve weights:
Theorem (with Needham)
For any non-nilpotent \(A_0 \in \mathbb{C}^{d \times d}\) with \(\|A\|^2=1\), the matrix \(A_\infty := \lim_{t \to \infty} \overline{\mathscr{F}}(A_0,t)\) exists, is balanced, has Frobenius norm 1, and has zero entries whenever \(A_0\) does.
If \(A_0\) is real, so is \(A_\infty\), and if \(A_0\) has all non-negative entries, then so does \(A_\infty\).
shonkwiler.org/kc24
Fusion frame homotopy and tightening fusion frames by gradient descent
Tom Needham and Clayton Shonkwiler
Journal of Fourier Analysis and Applications 29 (2023), no. 4, 51
Three proofs of the Benedetto–Fickus theorem
Dustin Mixon, Tom Needham, Clayton Shonkwiler, and Soledad Villar
Sampling, Approximation, and Signal Analysis (Harmonic Analysis in the Spirit of J. Rowland Higgins), Stephen D. Casey, M. Maurice Dodson, Paulo J. S. G. Ferreira and Ahmed Zayed, eds., Birkhäuser, Cham, 2023, 371–391
Geometric approaches to matrix normalization and graph balancing
Tom Needham and Clayton Shonkwiler
See also
By Clayton Shonkwiler




