




Clayton Shonkwiler PRO
Mathematician and artist
Jason Cantarella
U. of Georgia
Tetsuo Deguchi
Ochanomizu U.
Erica Uehara
Kyoto U.
Funding: Simons Foundation (#524120, #709150), National Science Foundation (DMS–2107700), Japan Science and Technology Agency (CREST JPMJCR19T4, Deguchi Lab), Japan Society for the Promotion of Science (KAKENHI JP17H06463)
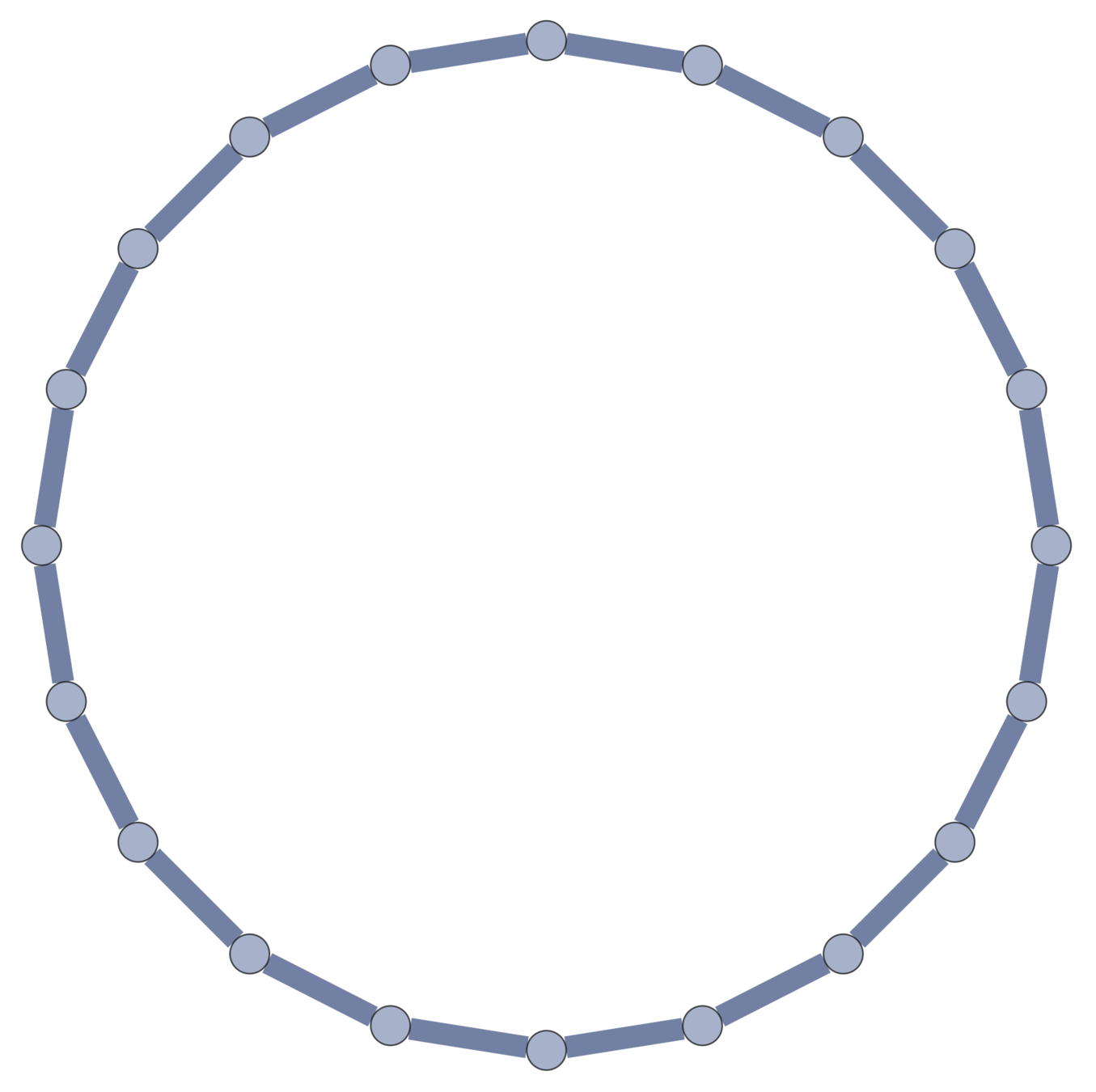
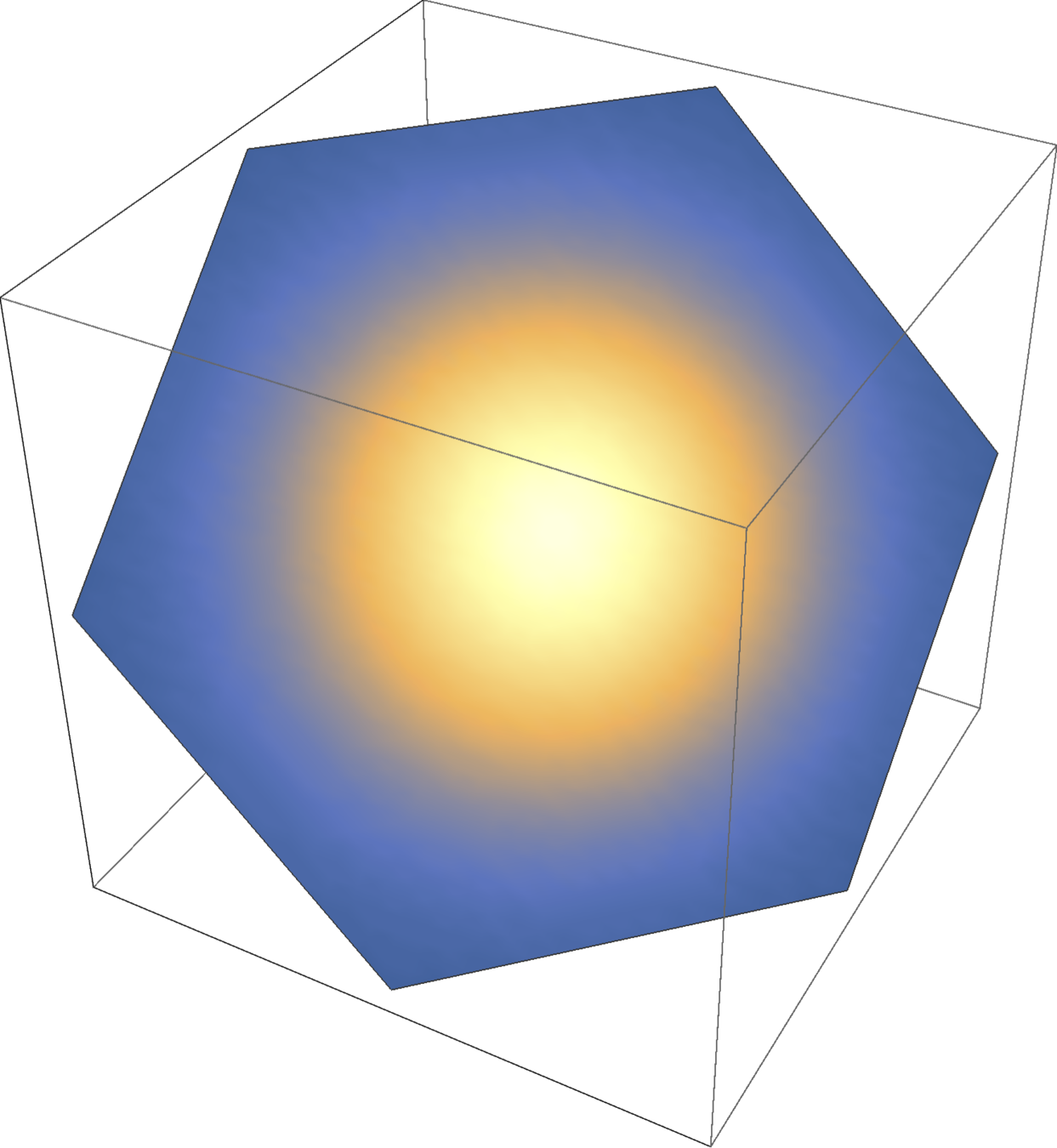
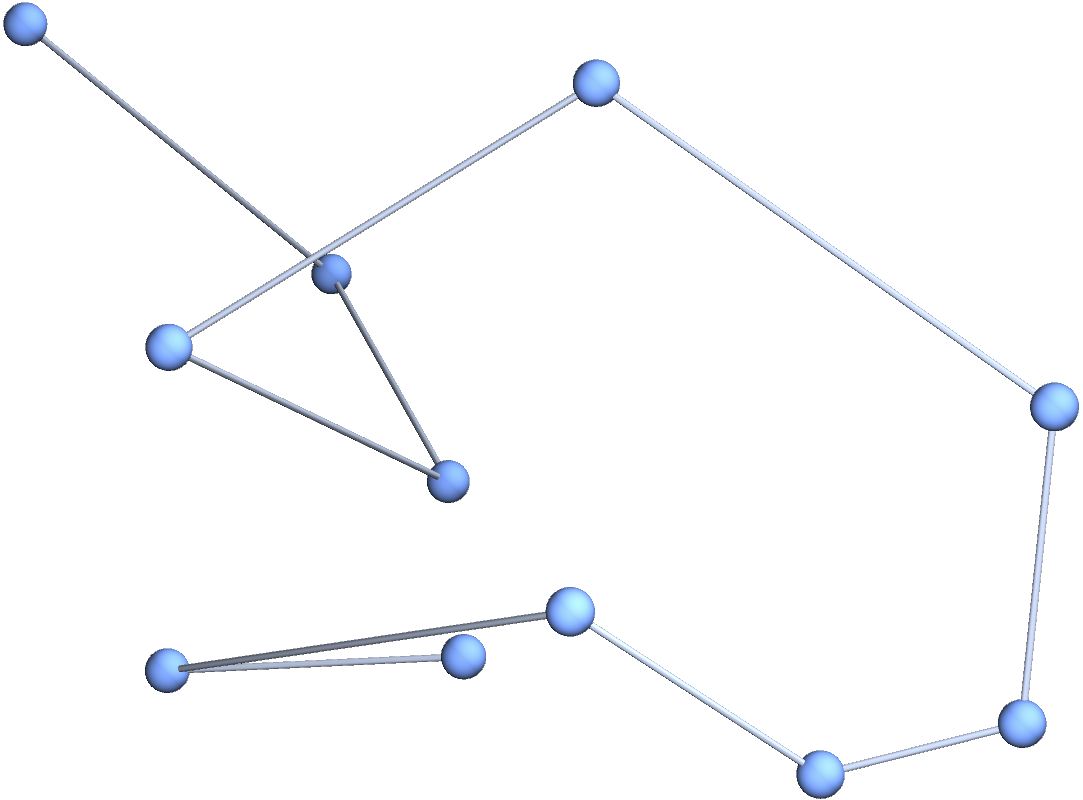
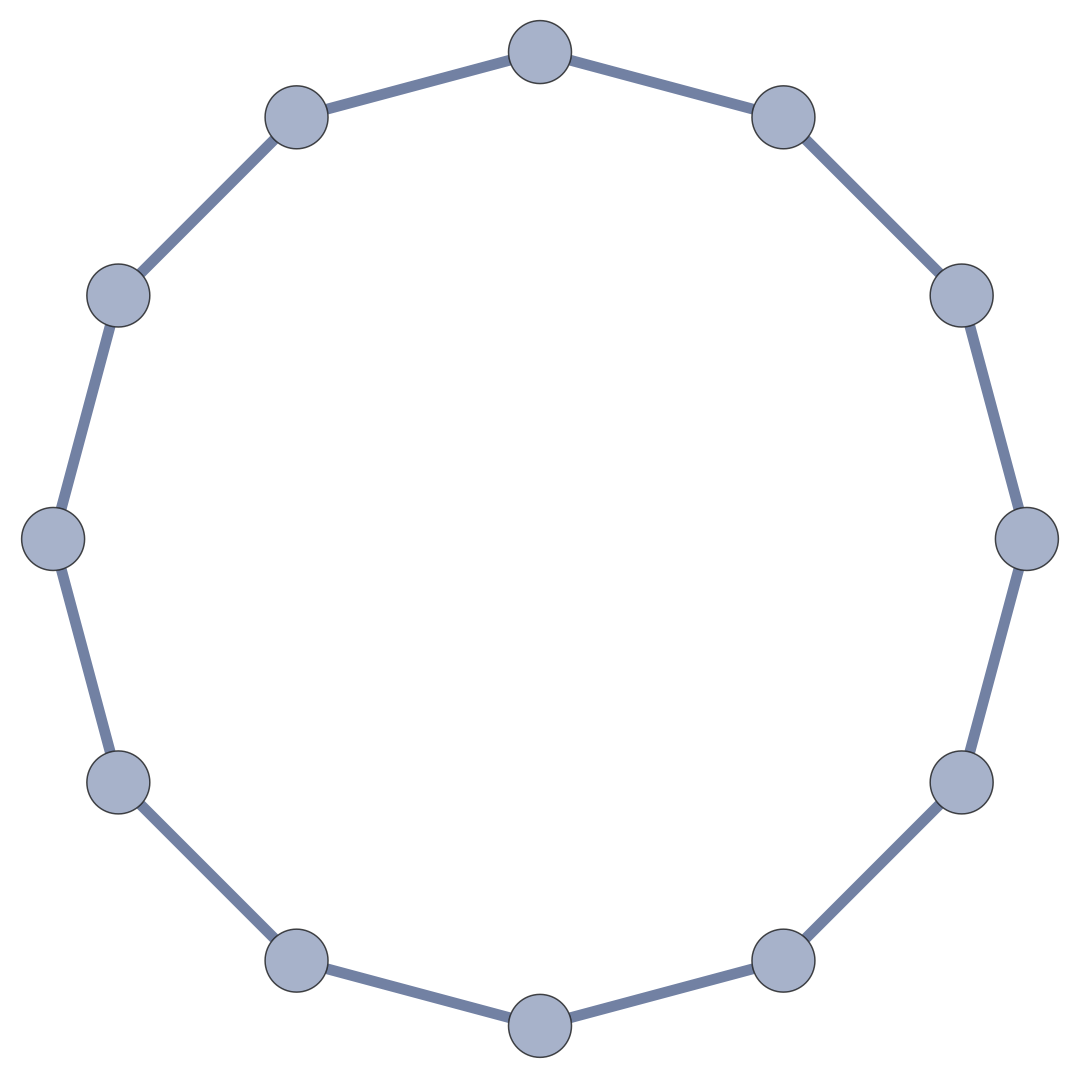
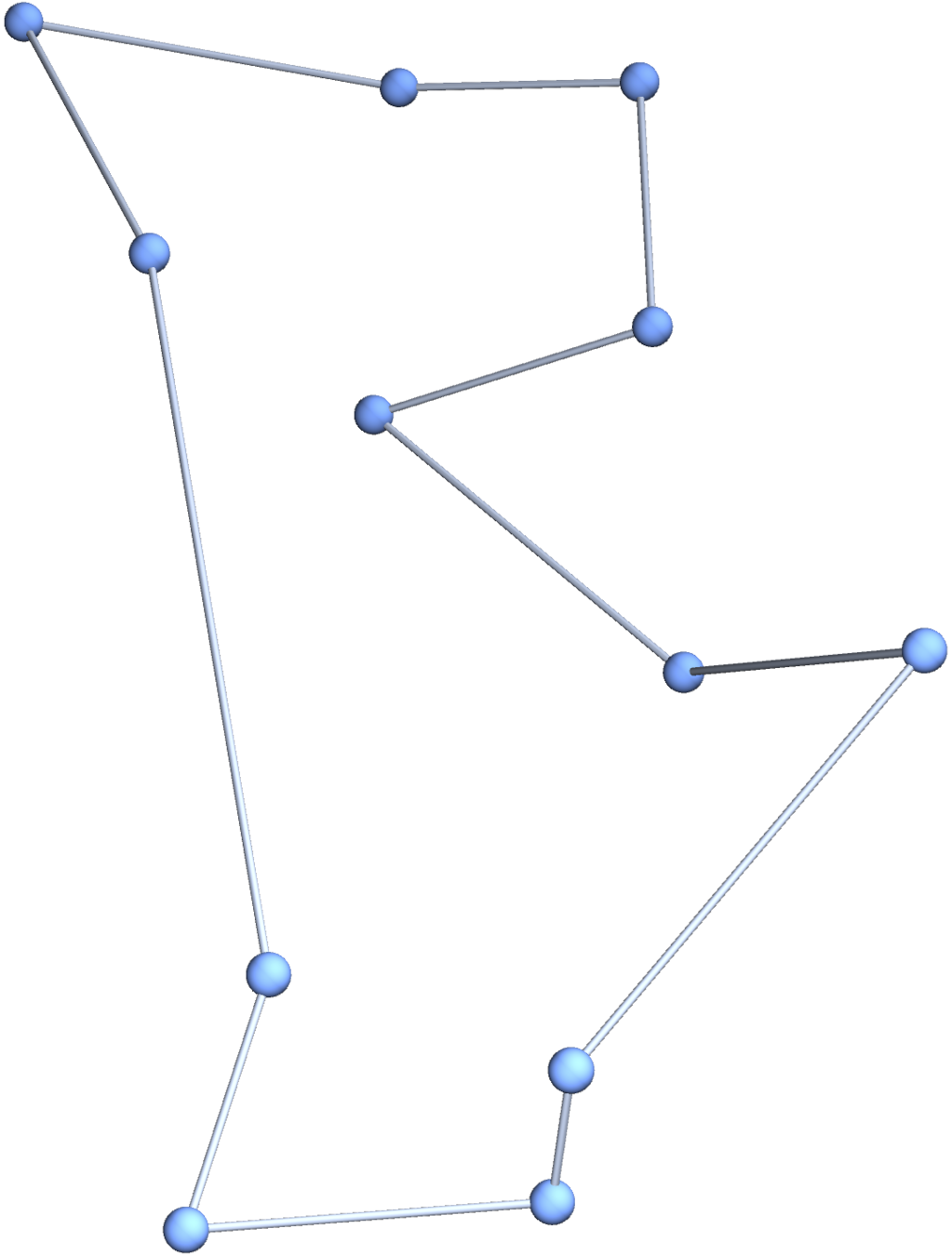
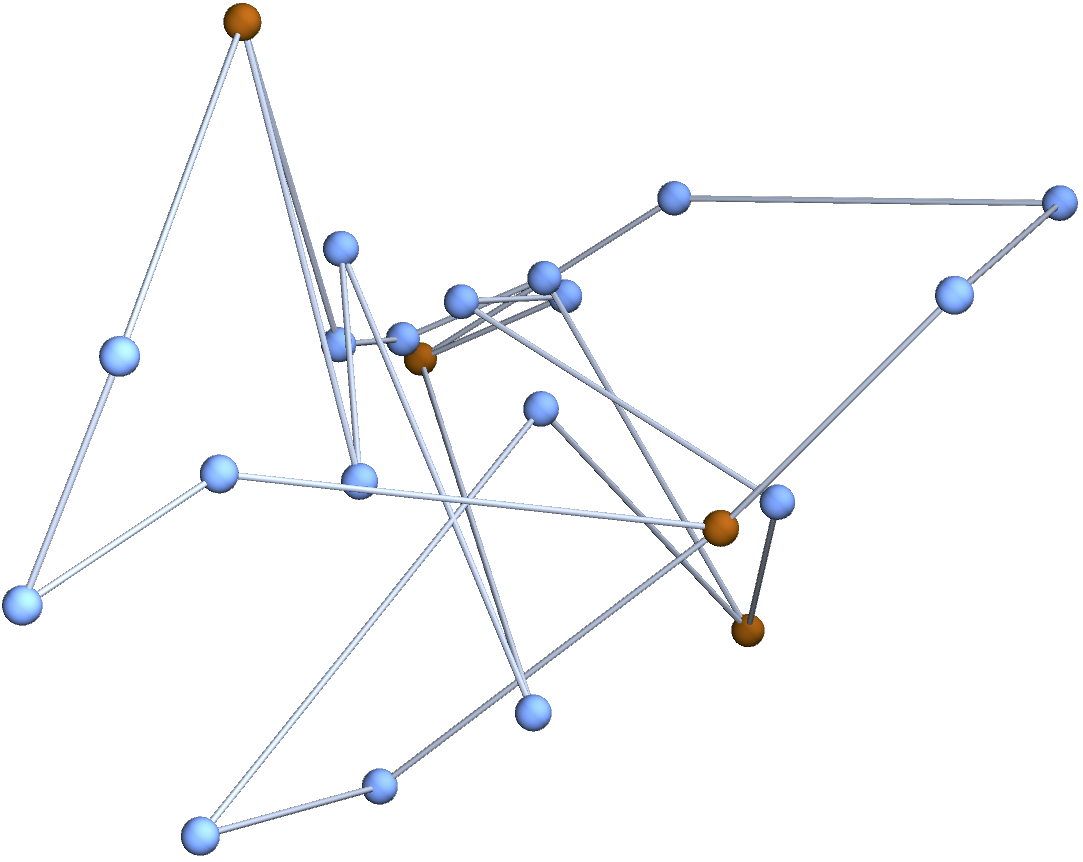
A topological polymer joins monomers in any graph type.
Embed into \(\mathbb{R}^3\) with probability proportional to
\(\displaystyle \exp\left( -\frac{1}{2\sigma^2}\sum_{\stackrel{\bullet\!-\!-\!\bullet}{v_i \,\, v_j}}\|x_i-x_j\|^2\right)\)
Theorem [Estrada–Hatano, James–Guth]
\(\langle R_g^2(\mathcal{G})\rangle = \frac{3\sigma^2}{\mathbf{v}} \operatorname{tr}L(\mathcal{G})^+\).
Graph Laplacian
Pseudoinverse
Question
How much of this can be generalized beyond Gaussian distributions?
Question
What if the graph has special structure? E.g., subdivision graphs.
Let \(\mathcal{G}\) be a (directed) graph with \(\mathbf{e}\) edges and \(\mathbf{v}\) vertices.
Definition
The vector space \(C_0\) of vertex chains is the vector space of (formal) linear combinations of vertices:
\(x = x_1 v_1 + \dots + x_{\mathbf{v}}v_{\mathbf{v}}\).
Definition
The vector space \(C_1\) of edge chains is the vector space of (formal) linear combinations of edges:
\(w = w_1 e_1 + \dots + w_{\mathbf{e}}e_{\mathbf{e}}\).
Definition
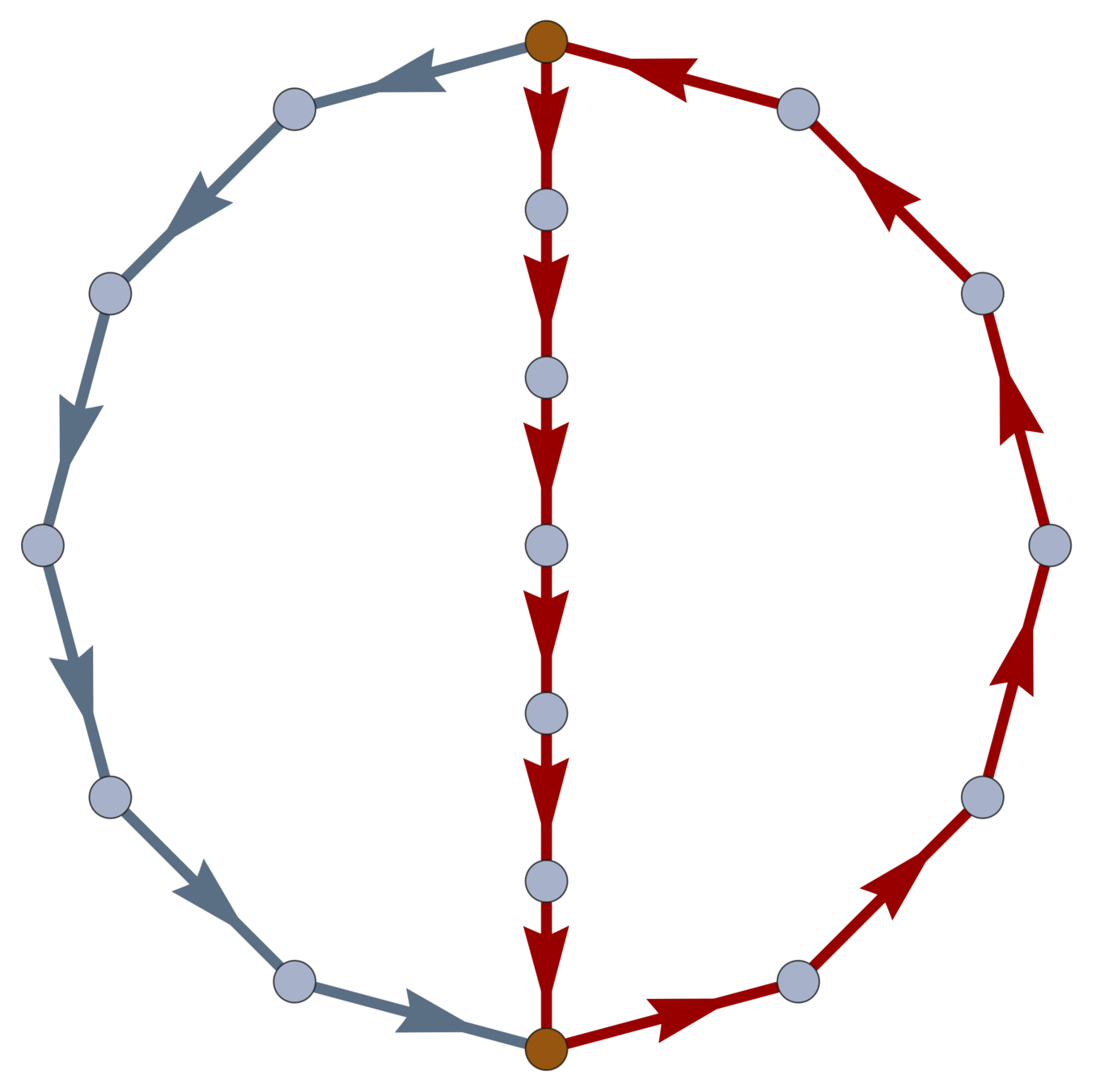
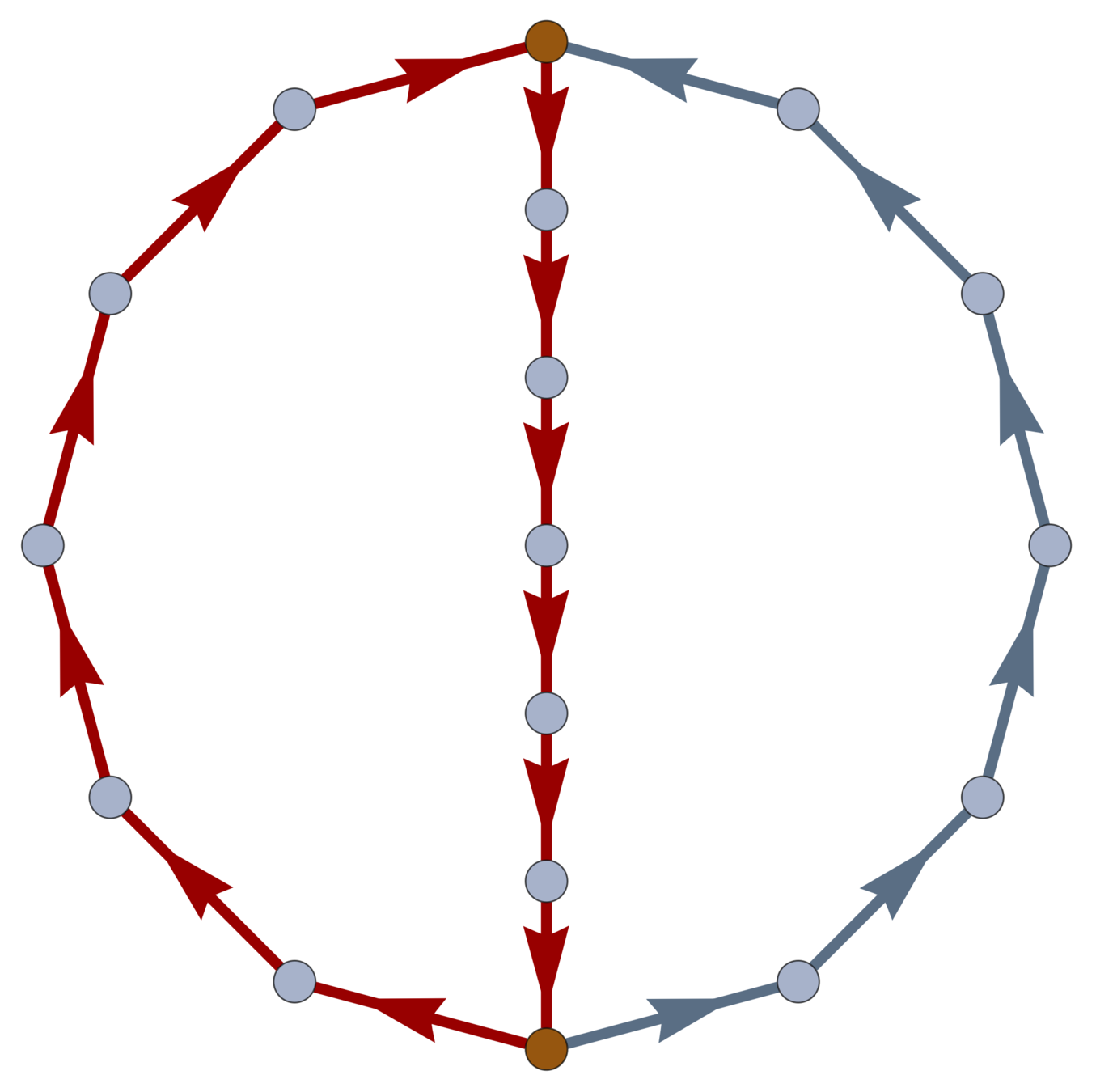
The boundary map \(\partial : C_1 \to C_0\) is defined by
\(\partial(e_i) = \operatorname{head}(e_i) - \operatorname{tail}(e_i)\).
Definition
The boundary map \(\partial : C_1 \to C_0\) is defined by
\(\partial(e_i) = \operatorname{head}(e_i) - \operatorname{tail}(e_i)\).
Definition
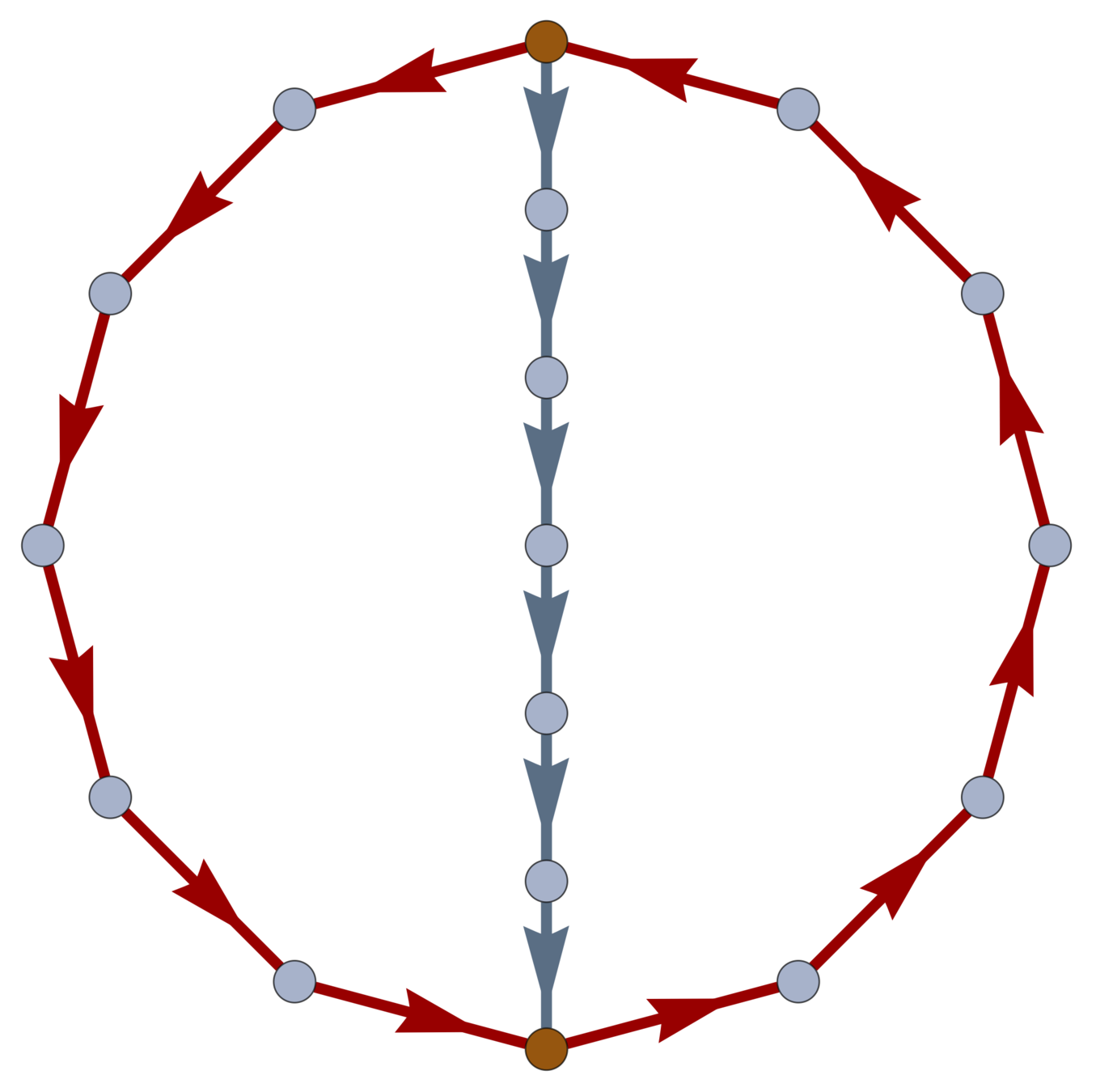
\(\operatorname{ker} \partial \subset C_1\) is the loop space of \(\mathcal{G}\).
Definition
Every \(w \in \ker \partial \subset C_1\) is a linear combination of closed loops. \(\dim\ker \partial\) is the cycle rank \(\chi(\mathcal{G}) = \mathbf{e} - \mathbf{v}+1\).
\(-\)
\(=\)
The chain spaces encode the topology of the graph. The embedding into \(\mathbb{R}^3\) is determined by:
Definition
The space of vertex positions \(C^0 := \operatorname{Lin}(C_0,\mathbb{R}^3) \simeq \operatorname{Mat}_{3 \times \mathbf{v}}\).
Definition
The space of edge displacements \(C^1 := \operatorname{Lin}(C_1,\mathbb{R}^3) \simeq \operatorname{Mat}_{3 \times \mathbf{e}}\).
Definition
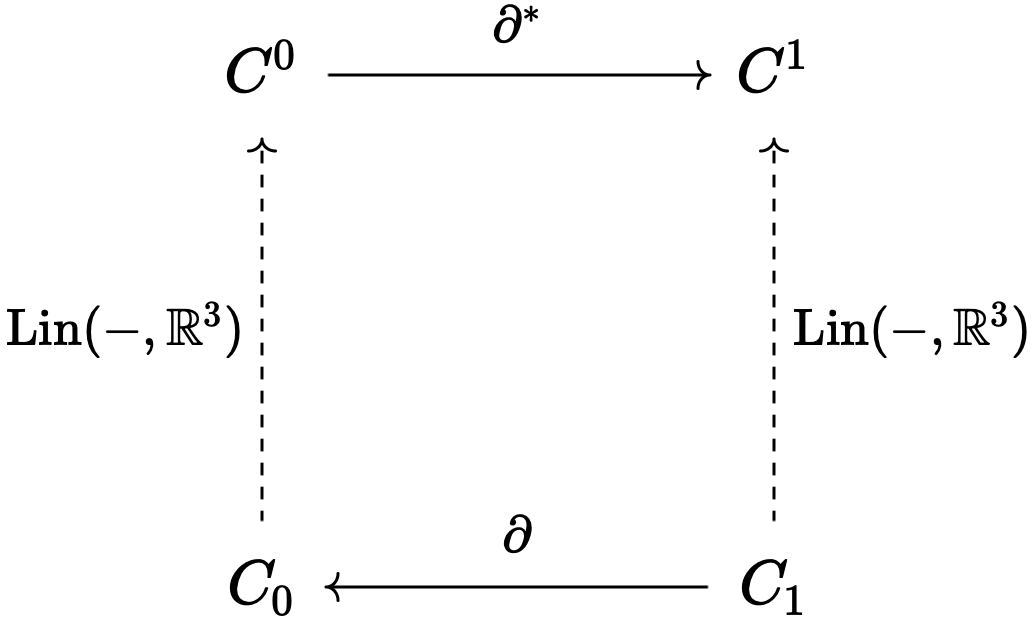
The displacement map \(\operatorname{disp}: C^0 \to C^1\) is given by
\(\operatorname{disp}(X)(e_i) = X(\operatorname{head}(e_i)) - X(\operatorname{tail}(e_i)) = X(\partial(e_i))\).
Proposition
The map \(\operatorname{disp}:C^0 \to C^1\) is equal to the map \(\partial^\ast\) induced by \(\operatorname{Lin}(-,\mathbb{R}^3)\).
Proposition
If \(W = \partial^* X = X \partial \), then
\(\operatorname{vec}W = (\partial^T \otimes I_3) \operatorname{vec} X\).
Theorem
The space of assignments of edge displacements compatible with the graph type \(\mathcal{G}\) is the linear subspace
\(\operatorname{im}\operatorname{disp} = \operatorname{im}\partial^\ast = \operatorname{im}(\partial^T \otimes I_3)\subset C^1\).
\(C^1 \simeq \mathbb{R}^{3\mathbf{e}}\)
\(C^0 \simeq \mathbb{R}^{3\mathbf{v}}\)
\(\partial^\ast\)
\(\operatorname{im}\partial^\ast\)
?
\(\partial^{\ast +}\)
\((\operatorname{ker}\partial^\ast)^\bot\)
Proposition
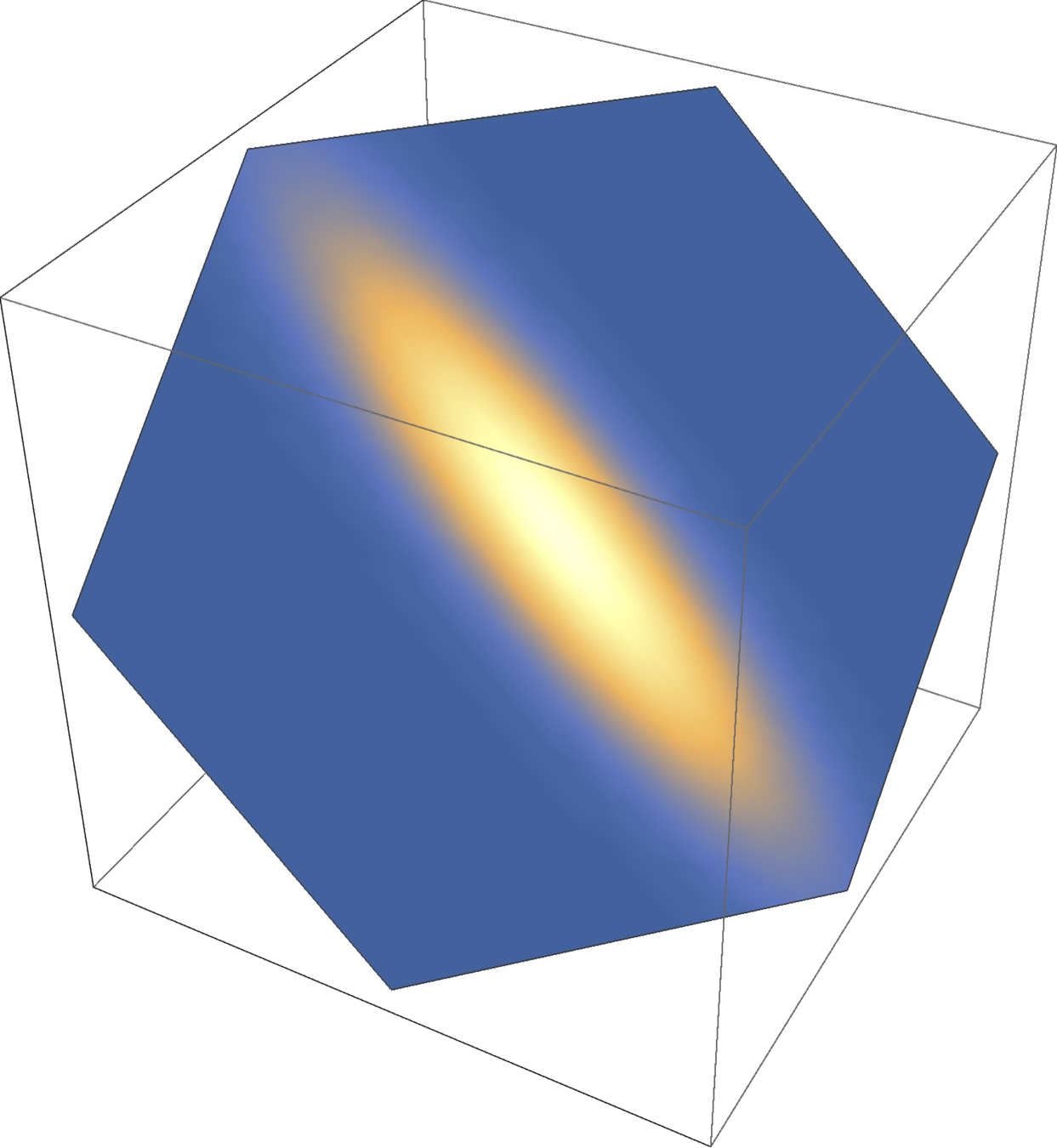
If \(\operatorname{vec}W\) is sampled from a Gaussian with variance \(\sigma^2\), then \(\operatorname{vec}X = (\partial^T \otimes I_3)^+ \operatorname{vec}W\) is Gaussian with covariance
\(\sigma^2[(\partial \partial^T)^+ \otimes I_3] = \sigma^2 (L^+ \otimes I_3)\).
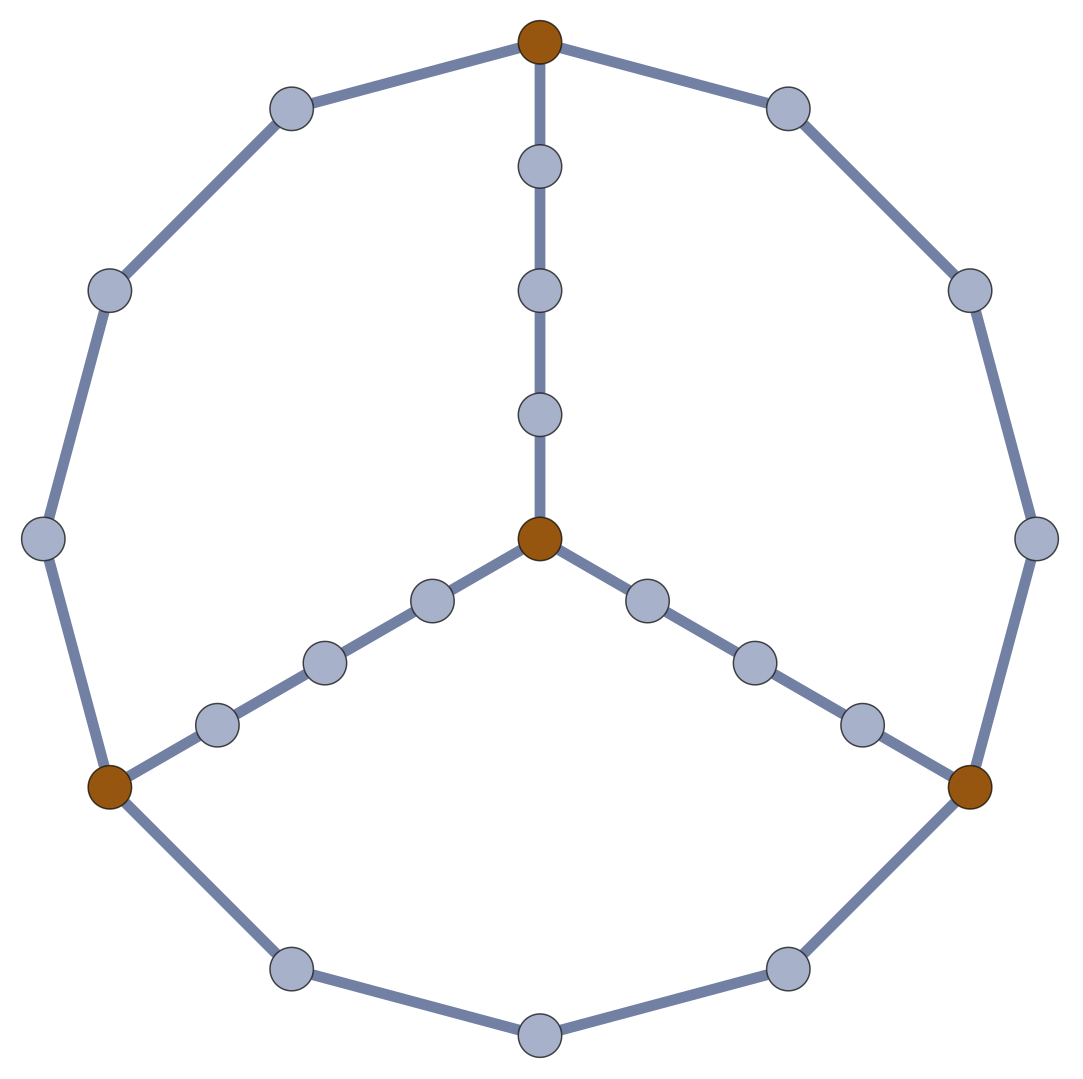
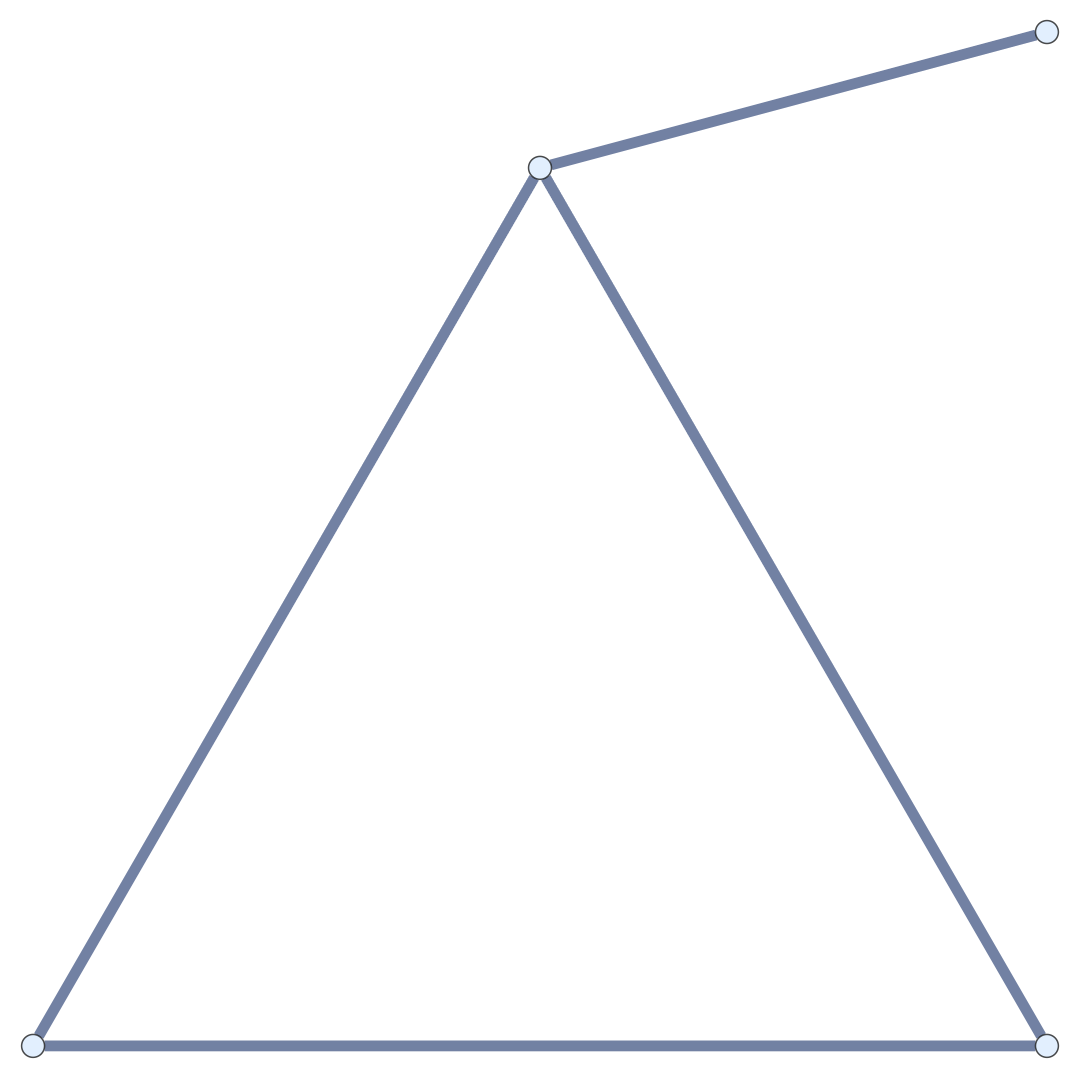
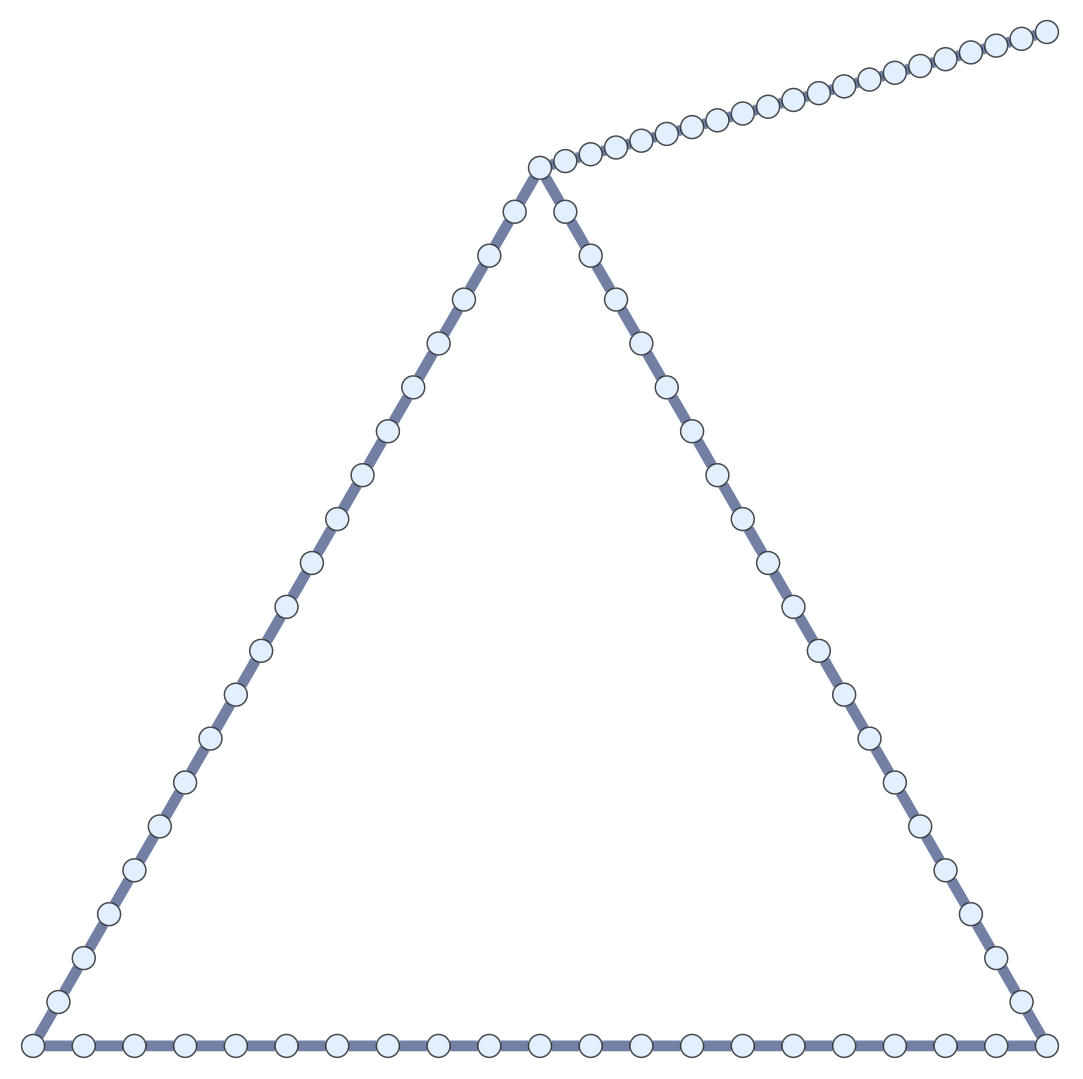
Definition
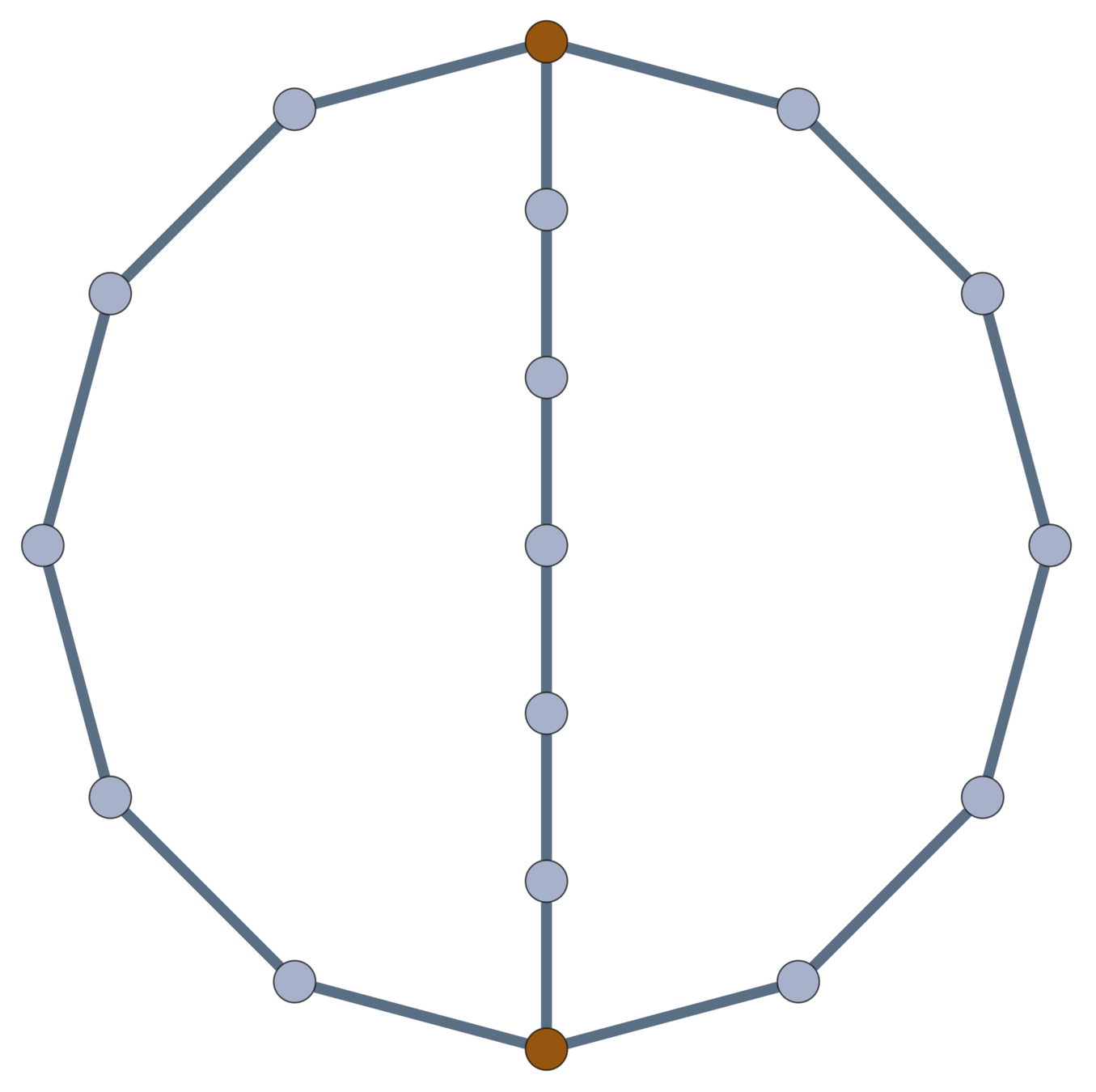
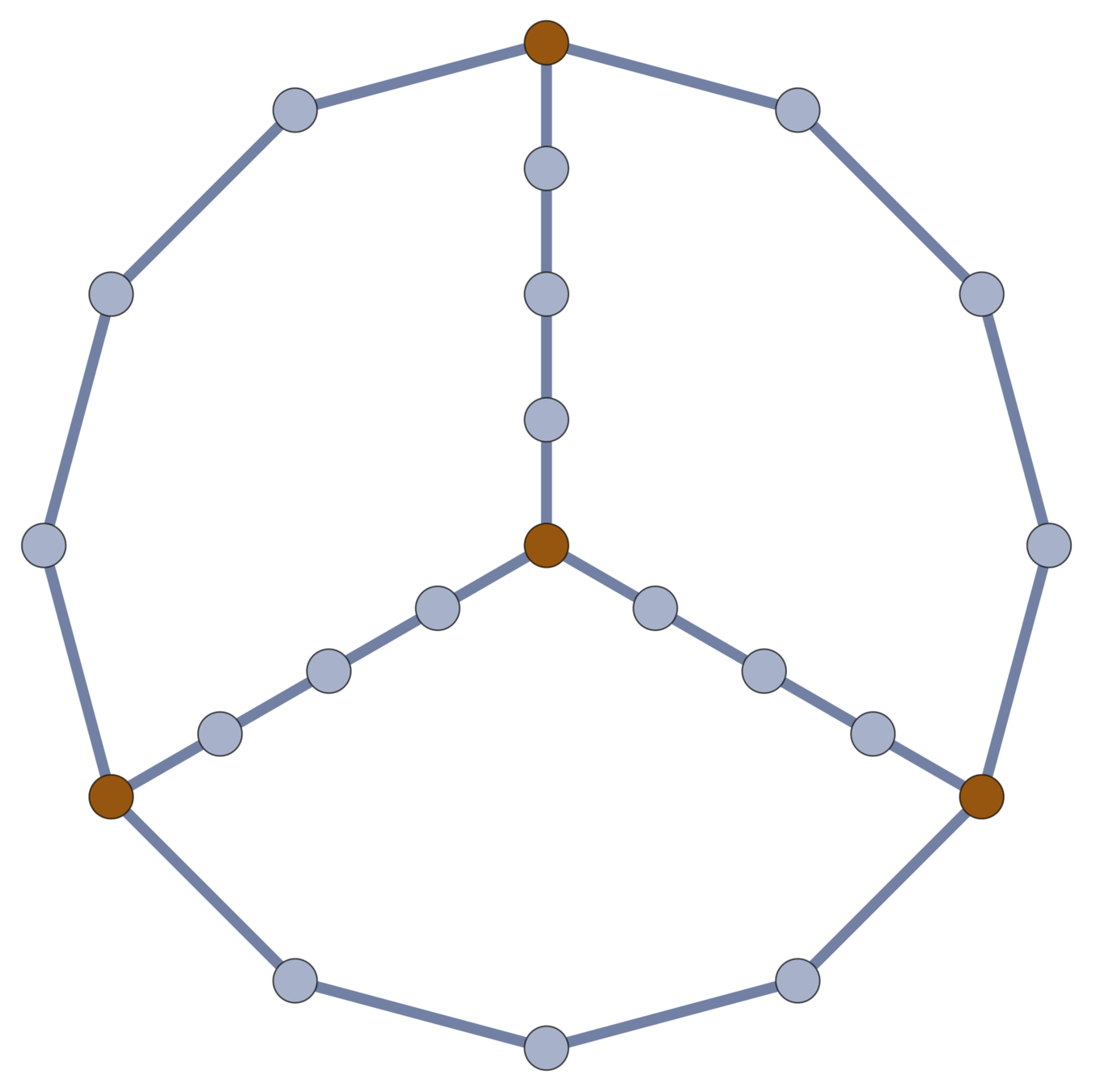
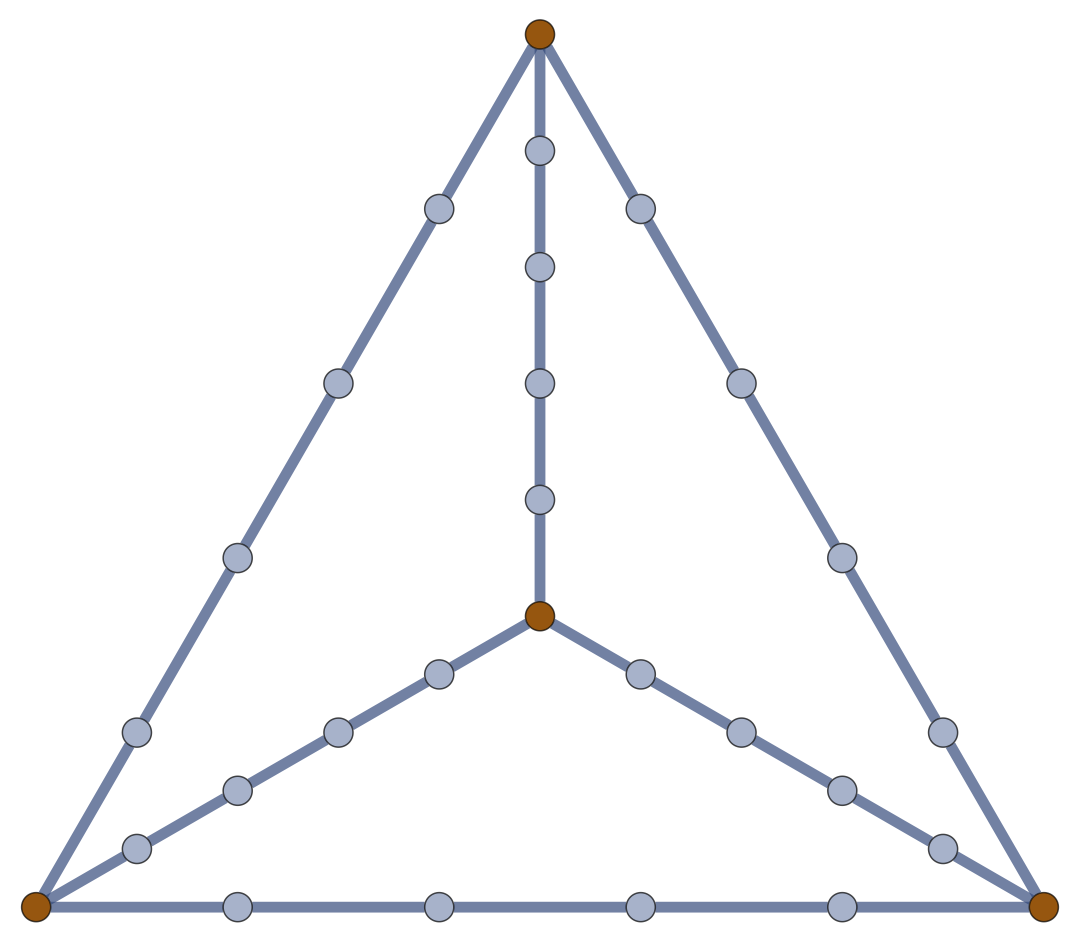
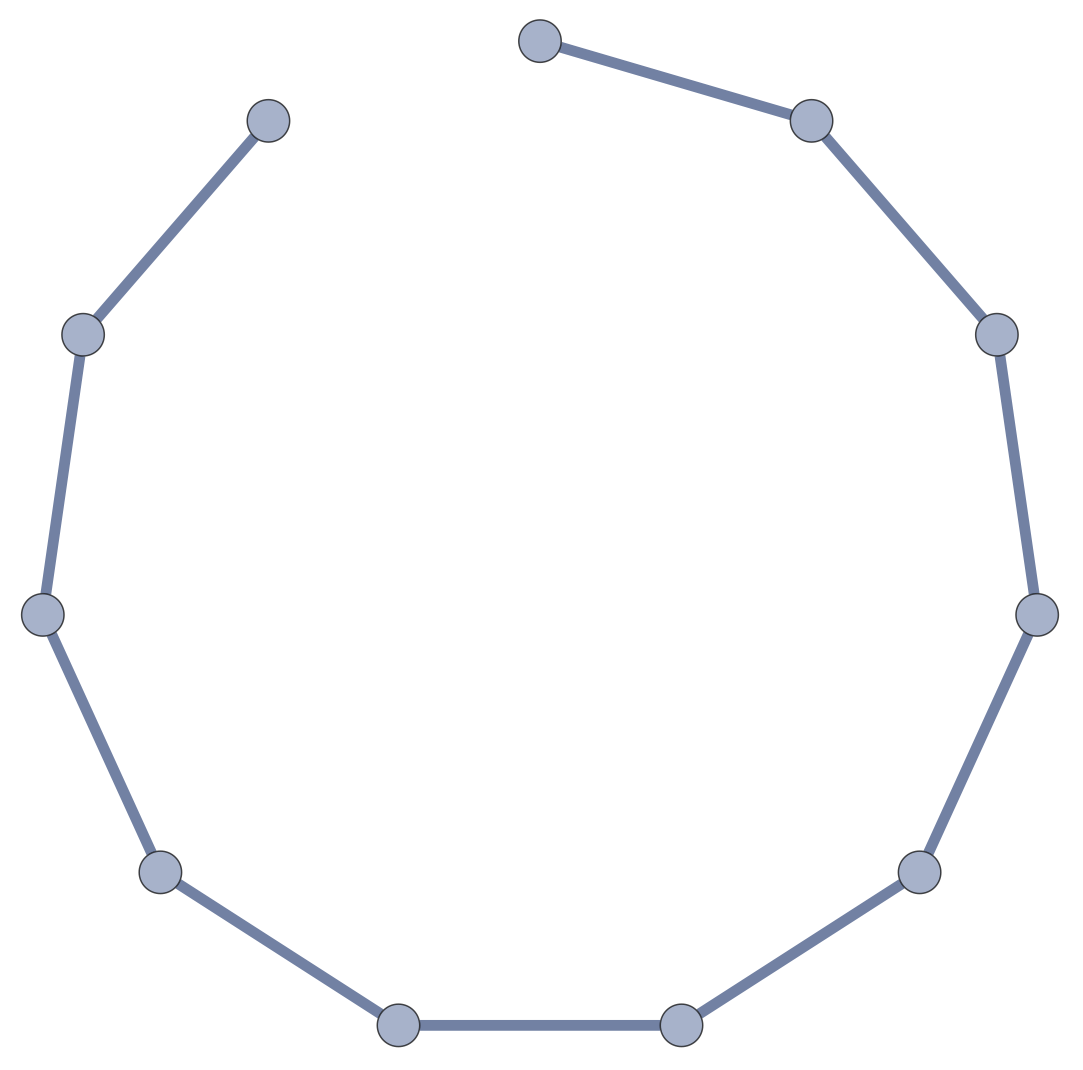
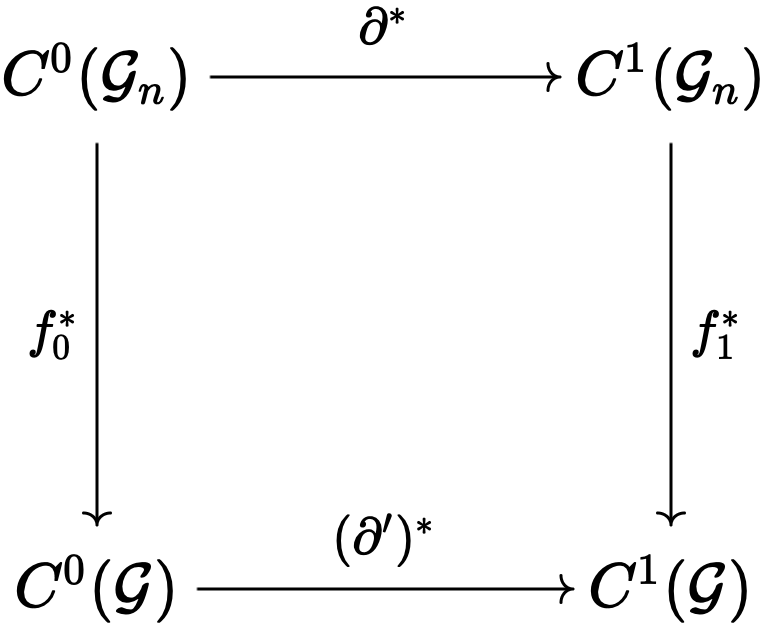
For a multigraph \(\mathcal{G}\), let \(\mathcal{G}_n\) be the graph created by subdividing each edge of \(\mathcal{G}\) into \(n\) edges.
\(\langle R_g^2(\mathcal{G}_n)\rangle = \frac{3\sigma^2}{\mathbf{v(\mathcal{G}_n)}} \operatorname{tr}L(\mathcal{G}_n)^+\)
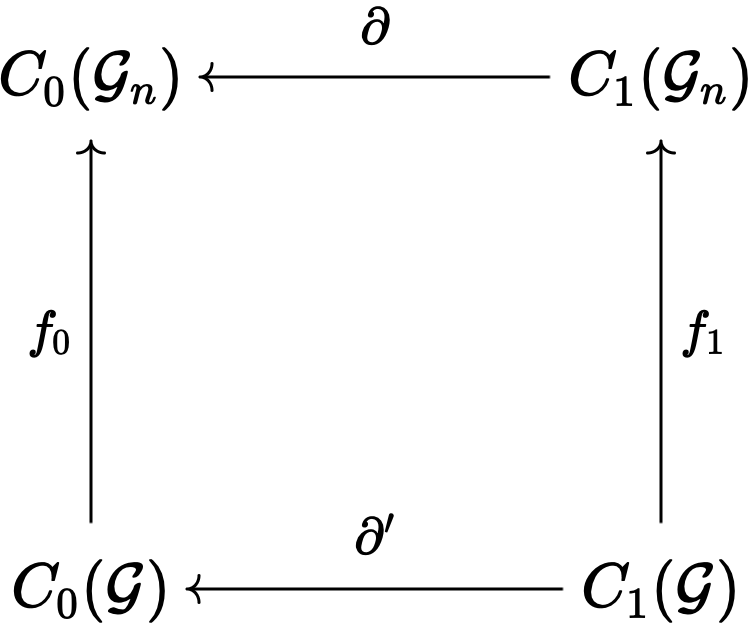
Idea
The junction positions in a random embedding of a subdivided graph ought to be some random embedding of the structure graph.
Idea
The junction positions in a random embedding of a subdivided graph ought to be some random embedding of the structure graph.
Idea
The radius of gyration of the subdivided graph should be some weighted radius of gyration of the structure graph.
Idea
The radius of gyration of the subdivided graph should be some weighted radius of gyration of the structure graph.
Theorem [with Cantarella, Deguchi, Uehara (2022)]
\(\lim_{n \to \infty}\frac{1}{n}\langle R_g^2(\mathcal{G}_n)\rangle = \frac{3\sigma^2}{2\mathbf{e}(\mathcal{G})}\left(\operatorname{tr}\mathcal{L}^+(\mathcal{G})+\frac{1}{3}\operatorname{Loops}(\mathcal{G})-\frac{1}{6}\right)\).
Theorem [with Cantarella, Deguchi, Uehara (2025)]
\(\langle R_g^2(\mathcal{G}_n)\rangle = 3\sigma^2\frac{n^2-1}{\mathbf{v}(\mathcal{G_n})}\left(\frac{n}{n+1}\operatorname{tr}\mathcal{L}_{\operatorname{deg}(n)}^+(\mathcal{G})+\frac{1}{3}\left(1-\frac{1}{2\mathbf{v}(\mathcal{G_n})}\right)\operatorname{Loops}(\mathcal{G_n})\right.\)
\( \left. \qquad \qquad \qquad \qquad \qquad -\frac{1}{6}\left(1-\frac{1}{\mathbf{v}(\mathcal{G_n})}\right)\right)\).
Note: \(\mathbf{v}(\mathcal{G}_n) = (n-1)\mathbf{e}(\mathcal{G})+\mathbf{v}(\mathcal{G})\)
Factoring the Laplacian to understand topological polymers
J. Cantarella, T. Deguchi, C. Shonkwiler, E. Uehara
Europhysics Letters 152 (2025), no. 1, 12001
Radius of gyration, contraction factors, and subdivisions of topological polymers
J. Cantarella, T. Deguchi, C. Shonkwiler, E. Uehara
J. Phys. A 55 (2022), no. 47, 475202
An exact formula for the contraction factor of a subdivided Gaussian topological polymer
J. Cantarella, T. Deguchi, C. Shonkwiler, E. Uehara
J. Phys. A 58 (2025), no. 35, 355201
By Clayton Shonkwiler




