Algoritmos de ordenamiento
El algoritmo de ordenamiento ideal
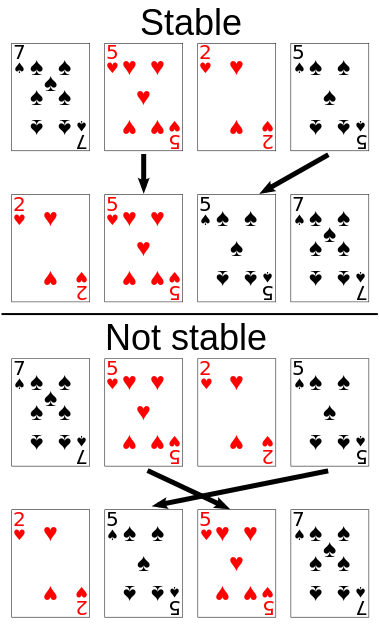
- Estable: No intercambia el orden de elementos con el mismo valor.
- No tiene overhead.
- En el peor de los casos tiene O(n log n) comparaciones.
- En el peor de los casos tiene O(n) intercambios.
- Flexible: La complejidad temporal tiende a O(n) cuando los datos están semi-ordenados o cuando hay pocas llaves únicas.
Ordenamiento por inserción
- Definición: Es una manera natural de ordenar datos. De la lista de n datos, se toma el elemento k y se compara con los k-1 anteriores para encontrar su posición.
- Complejidad espacial adicional: O(1)
- Complejidad temporal
- Mejor de los casos: O(n)
- Caso promedio: O(n^2)
- Peor de los casos: O(n^2)
- Intercambios: O(n^2)
template<typename T_>
void insertionSort(T_ arr[], int length)
{
for(int i = 1; i < length; i++)
{
// Invariante: a[1..i] está ordenado
for(int j = i; j > 0 && arr[j] < arr[j - 1]; j--)
{
T_ temp = arr[j];
arr[j] = arr[j-1];
arr[j-1] = temp;
}
}
}Ejemplo
Ventajas
- Simple de implementar.
- Eficiente para conjuntos de datos reducidos o cuando los datos están semi-ordenados.
- El más efectivo que otros algoritmos de O(n^2).
- Estable.
- Requiere poco overhead.
Desventajas
- Complejidad temporal O(n^2) en promedio y en el peor de los casos.
Ordenamiento por selección
- Definición: En cada iteración se toma el menor de los números y se coloca en la posición k de la lista, donde k es el número de iteración.
- Complejidad espacial adicional: O(1)
- Complejidad temporal
- Mejor de los casos: O(n^2)
- Caso promedio: O(n^2)
- Peor de los casos: O(n^2)
- Intercambios: O(n)
template<typename T_>
void selectionSort(T_ arr[], int length)
{
for(int i = 0; i < length; i++)
{
int k = i;
for(int j = i; j < length; j++)
{
if(arr[j] < arr[k])
{
// k es el índice
// del elemento más pequeño
// de arr[i...n]
k = j;
}
}
T_ temp = arr[i];
arr[i] = arr[k];
arr[k] = temp;
}
}Ventajas
- Simple de implementar.
- Reduce el número de comparaciones.
Desventajas
- No es estable.
- Complejidad temporal O(n^2) para todos los casos.
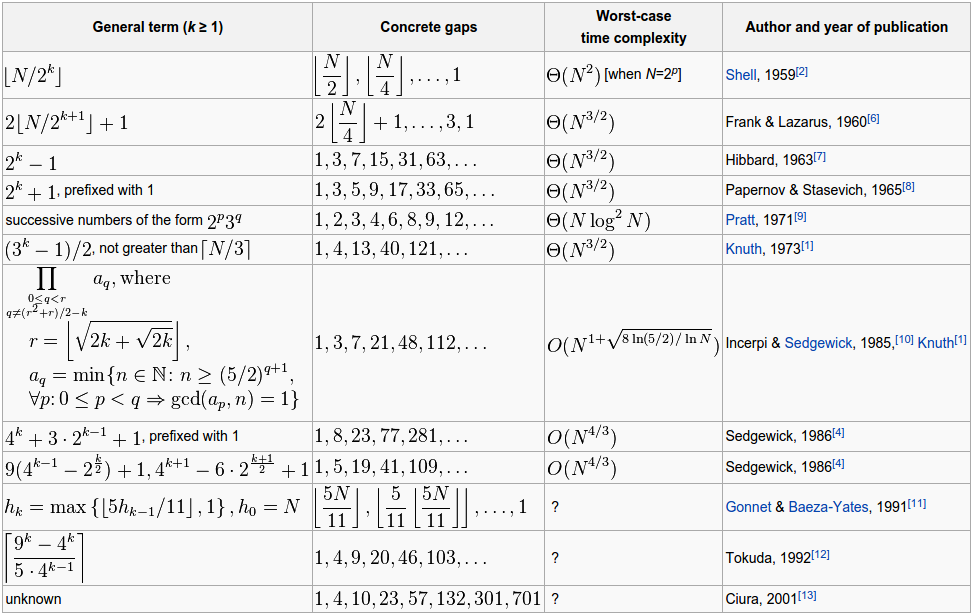
Ordenamiento Shell
- Definición: Ordena pares de elementos separados entre sí por una distancia considerable reduciendo con esto el espacio entre los elementos a comparar.
- Complejidad espacial adicional: O(1)
- Complejidad temporal
- Mejor de los casos: O(n log^2 n)
- Caso promedio: Siguiente diapositiva
- Peor de los casos: O(n^2)
Secuencia de espacios
#include <QVector>
template<typename T_>
void shellSort(T_ arr[], int length)
{
int gap = 1;
QVector<int> gaps;
while(gap < length)
{
gaps.append(gap);
gap = gap * 3 + 1;
}
while(gaps.size() > 0)
{
int curGap = gaps.at(gaps.size() - 1);
gaps.pop_back();
// Invariante: a[0...curGap-1] ya están ordenados
for(int i = curGap; i < length; ++i)
{
T_ temp = arr[i];
int j;
// Ordenamiento por inserción
for(j = i - curGap; j >= 0 && arr[j] > temp; j -= curGap)
{
arr[j + curGap] = arr[j];
}
arr[j + curGap] = temp;
}
}
}Ventajas
- La complejidad temporal depende de la secuencia de incremento utilizada.
- Requiere poco overhead.
- Implementación relativamente fácil.
- Complejidad temporal sub-cuadrática.
Desventajas
- Es un problema abierto, su mejor rendimiento en términos de complejidad temporal no ha sido encontrada.
- Su rendimiento no es siginificativamente mayor a otros algoritmos de ordenamiento.
Ordenamiento por mezcla
(Mergesort)
- Definición: Es un algoritmo de divide y vencerás. Divide la lista desordenada en subconjuntos, hasta llegar a subconjuntos de un elemento, comienza a ordenar los subconjuntos mientras los va mezclando, la última lista mezclada es la lista ordenada.
- Complejidad espacial adicional: O(n)
- Complejidad temporal
- Mejor de los casos: O(n log n)
- Caso promedio: O(n log n)
- Peor de los casos: O(n log n)
template<typename T_>
void mergeSort(T_ arr[], int low, int high)
{
if(low < high)
{
int mid = (low + high)/2;
// Ordenar recursivamente
// las mitades del arreglo
mergeSort(arr, low, mid);
mergeSort(arr, mid + 1, high);
// Mezclar las mitades del
// arreglo ordenadas
merge(arr, low, mid, high);
}
}
template<typename S_>
void merge(S_ arr[], int low, int mid, int high)
{
S_ *b = new int[high - low + 1];
int h = low;
int i = 0;
int j = mid +1;
// Mezcla las dos mitades ordenadas en interaciones anteriores
while(h <= mid && j <= high)
{
if(arr[h] <= arr[j])
{
b[i] = arr[h];
++h;
}
else
{
b[i] = arr[j];
++j;
}
++i;
}
// Completa el arreglo con los valores restantes
if(h > mid)
{
for(int k = j; k <= high; ++k)
{
b[i] = arr[k];
++i;
}
}
else
{
for(int k = h; k <= mid; ++k)
{
b[i] = arr[k];
++i;
}
}
// Mover la parte ordenada al arreglo original
memcpy(arr + low, b, (high - low + 1) * sizeof(S_));
delete[] b;
}Ejemplo
Ventajas
- Simple de implementar.
- Estable (el único del tipo O(n log n)).
- Mejor rendimiento ordenando listas enlazadas (complejidad espacial adicional O(log n)).
Desventajas
- Tiene overhead de O(n).
- No es flexible.
Ordenamiento por montículos
(Heapsort)
- Definición: Se puede considerar como una versión mejorada de ordenamiento por selección. La diferencia radica en utilizar un montículo (heap) en lugar de una búsqueda lineal para encontrar el mínimo.
- Complejidad espacial adicional: O(1)
- Complejidad temporal:
- Mejor de los casos: O(n log n)
- Caso promedio: O(n log n)
- Peor de los casos: O(n log n)
Concepto de montículo

La raíz está en 0. Por cada índice i, se cumple:
- Sus hijos están en los índices 2i+1 y 2i+2.
- Su padre está en floor((i-1)/2). (La raíz no tiene padre)
template<typename V_>
void siftDown(V_ arr[], int start, int end)
{
int root = start;
while(root * 2 + 1 <= end)
{
int child = root * 2 +1;
int swap = root;
if(arr[swap] < arr[child])
{
swap = child;
}
if(child + 1 <= end && arr[swap] < arr[child + 1])
{
swap = child + 1;
}
// Si la raíz es el elemento mayor de ese montículo,
// quiere decir que el montículo está ordenado.
if(swap == root)
{
return;
}
else
{
V_ temp = arr[swap];
arr[swap] = arr[root];
arr[root] = temp;
root = swap;
}
}
}
template<typename S_>
void heapify(S_ arr[], int length)
{
// Se obtiene el índice del padre del último nodo
int start = floor((length - 2)/2);
while(start >= 0)
{
// Ordenar el montículo cuya raíz es start
siftDown(arr, start, length - 1);
start -= 1; // Ir a un nodo superior.
}
}
template<typename T_>
void heapSort(T_ arr[], int length)
{
// Poner el elemento mayor del arreglo
// como raíz del montículo
heapify(arr, length);
int end = length - 1;
// Invariante: arr[0...end] es un montículo
// y todo elemento después de end es mayor.
// Por lo que arr[end...length - 1] está ordenado
while(end > 0)
{
// arr[0] es el elemento más grande del arreglo
// se moverá al frente de la parte ordenada del
// arreglo.
T_ temp = arr[0];
arr[0] = arr[end];
arr[end] = temp;
end -= 1;
// El intercambio arruinó el montículo,
// por lo que hay que volver a ordenar.
siftDown(arr, 0, end);
}
}Ejemplo
Ventajas
- Sencillo de implementar.
- Tiene overhead constante.
- Complejidad temporal es O(n log n).
Desventajas
- No es estable.
- No es flexible.
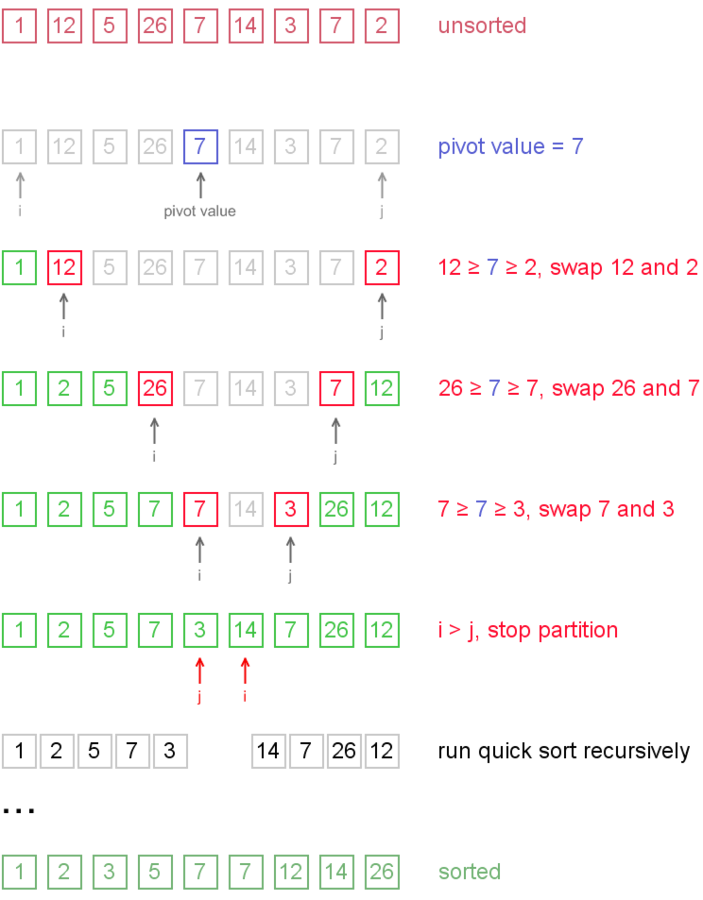
Ordenamiento rápido
(Quicksort)
- Definición: Es un algoritmo de divide y vencerás. Divide la lista desordenada en dos subconjuntos que se ordenan recursivamente en base a un pivote.
- Complejidad espacial adicional: O(n) o O(log n)
- Complejidad temporal:
- Mejor de los casos: O(n log n)
- Caso promedio: O(n log n)
- Peor de los casos: O(n log n) amortizado
template<typename T_>
void quickSort(T_ arr[], int left, int right)
{
int i = left;
int j = right;
T_ pivot = arr[(left + right) / 2];
// Partición
while (i <= j) {
while (arr[i] < pivot)
{
++i;
}
while (arr[j] > pivot)
{
--j;
}
if (i <= j)
{
T_ tmp = arr[i];
arr[i] = arr[j];
arr[j] = tmp;
++i;
--j;
}
};
// Recursión
if (left < j)
{
quickSort(arr, left, j);
}
if (i < right)
{
quickSort(arr, i, right);
}
}
Ventajas
- Poco overhead.
Desventajas
- No es estable.
- No es flexible.
- O(n^2) cuando hay pocas llaves únicas.
- Existe una mejor versión.
Ordenamiento rápido mejorado
(Quicksort 3-way partition)
- Definición: Es un algoritmo de divide y vencerás. Divide la lista desordenada en tres subconjuntos que se ordenan recursivamente en base a un pivote.
- Complejidad espacial adicional: O(log n)
- Complejidad temporal:
- Mejor de los casos: O(n log n)
- Caso promedio: O(n log n)
- Peor de los casos: O(n log n) amortizado
# choose pivot
swap a[n,rand(1,n)]
# 3-way partition
i = 1, k = 1, p = n
while i < p,
if a[i] < a[n], swap a[i++,k++]
else if a[i] == a[n], swap a[i,--p]
else i++
end
→ invariant: a[p..n] all equal
→ invariant: a[1..k-1] < a[p..n] < a[k..p-1]
# move pivots to center
m = min(p-k,n-p+1)
swap a[k..k+m-1,n-m+1..n]
# recursive sorts
sort a[1..k-1]
sort a[n-p+k+1,n]Ventajas
- Poco overhead.
- Es flexible.
Desventajas
- No es estable.
Algoritmos de ordenamiento
By Victor Romero