Zdalnie sterowany pojazd gąsienicowy
Remote-controlled tracked vehicle
Autor: Mariusz Kupidura
Promotor: dr hab. Piotr Zawadzki
Projekt i realizacja sprzętowa zdalnie sterowanego samobieżnego podwozia dla robotów wielozadaniowych.
Projekt urządzenia jest uniwersalną platformą bazową którą będzie można rozszerzać o kolejne moduły robocze w zależności od charakteru robota docelowego.
Cel pracy
Zakres funkcjonalności
Robot powinien być w stanie poruszać się w trudnym terenie oraz pokonywać proste przeszkody terenowe.
Silniki oraz jednostka centralna wyposażone w akumulatorowy system zasilania.
Zdalne sterowanie poprzez panel dostępny z szerokiej szerokiej gamy urządzeń mobilnych.
Moduły
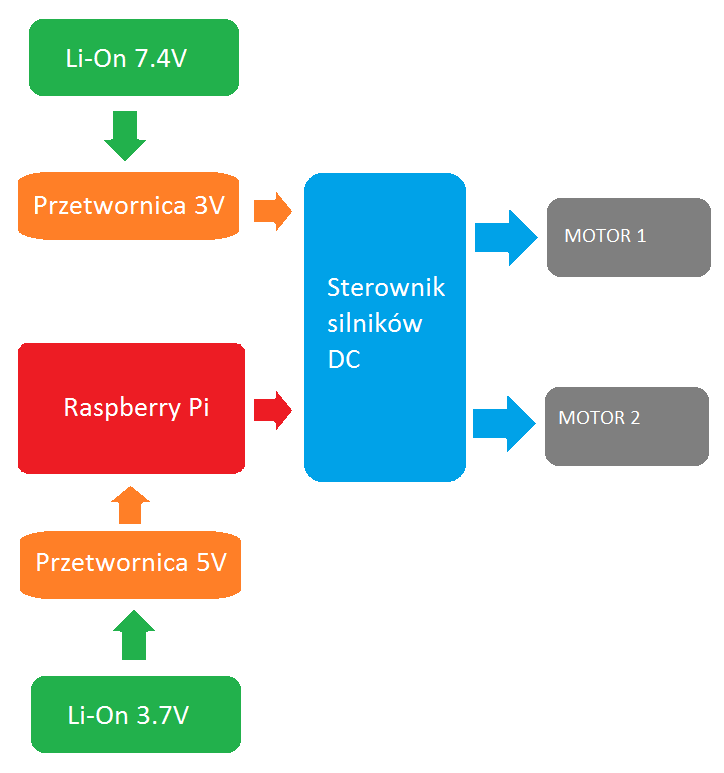
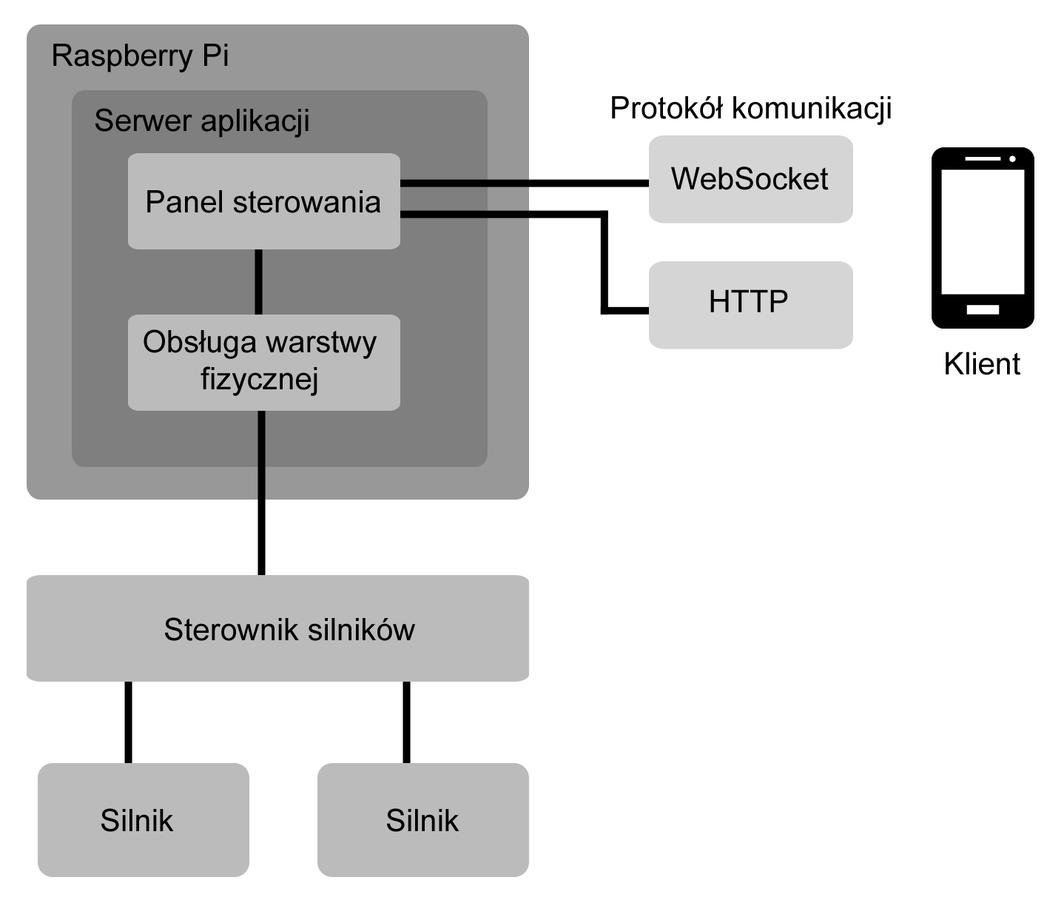
Jednostka centralna odpowiadająca za integracje poszczególnych modułów urządzenia
Układ zasilający
Panel zdalnego sterowania
Układ bieżnym
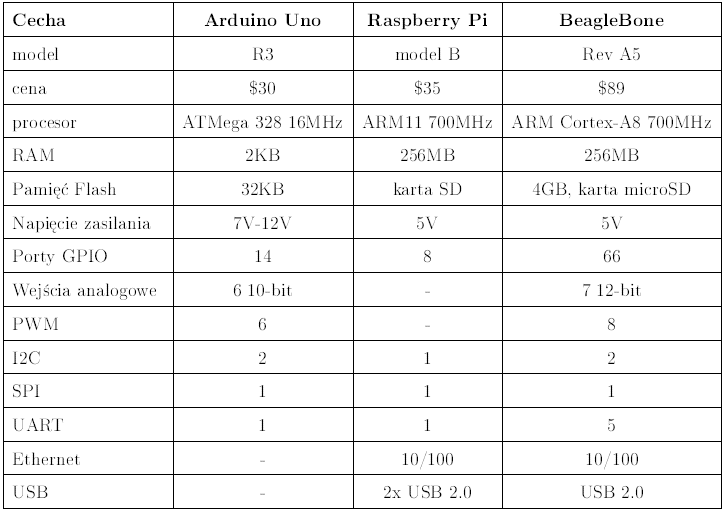
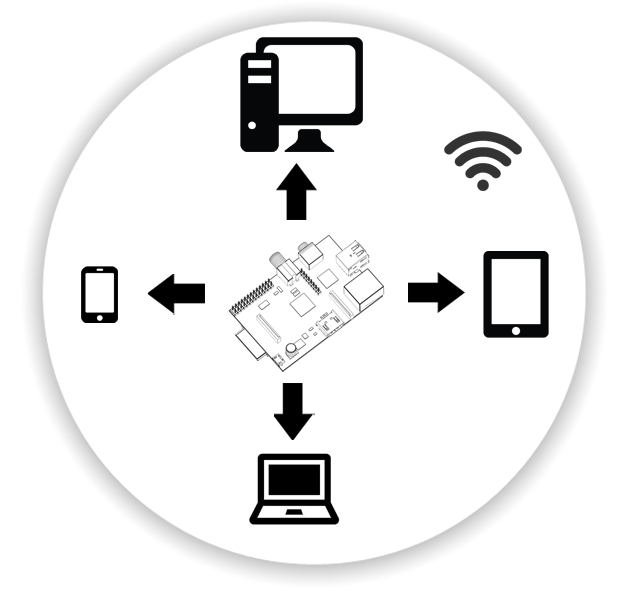
Raspberry Pi
Rasberry Pi jest małych rozmiarów w pełni funkcjonalnym komputerem, składającym się jedynie z jednej płytki PCB.
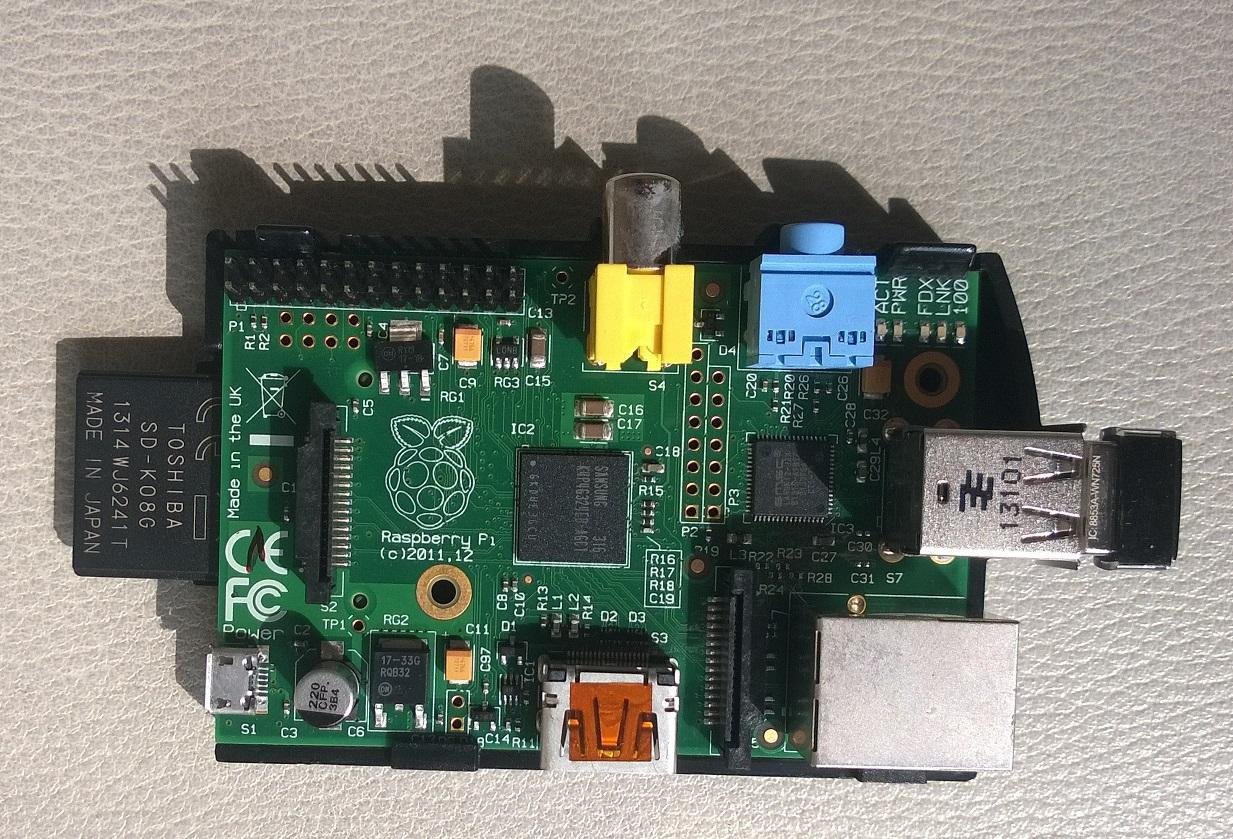
Jednostka centralna
Jednostka centralna
Układ zasilania
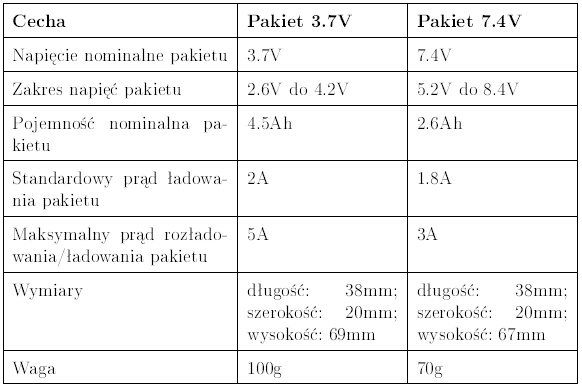
Ogniwa zasilające

Ogniwa zasilające
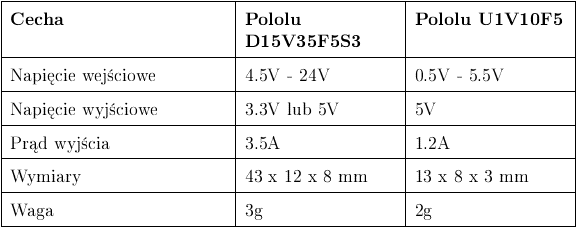
Przetwornice
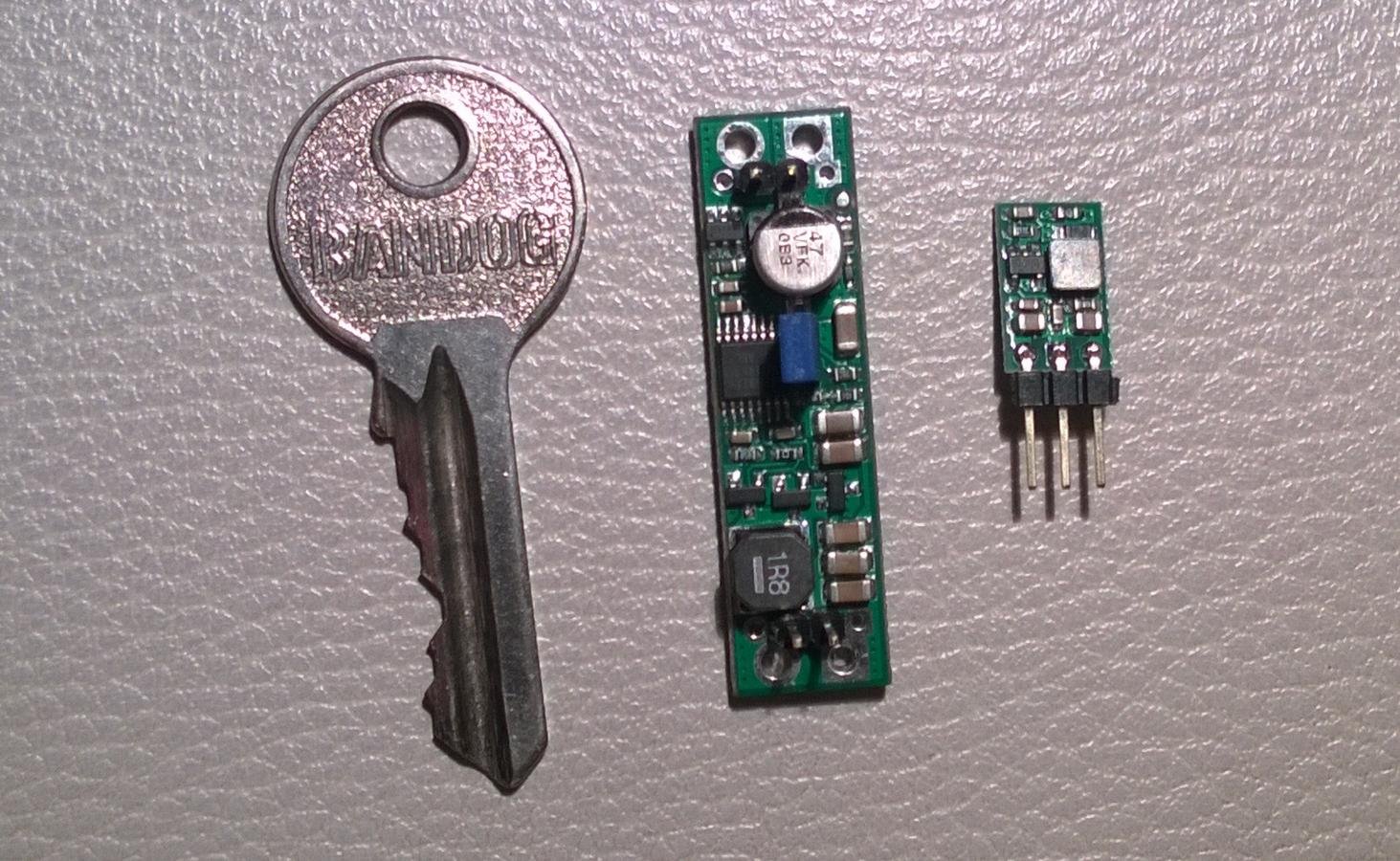
Przetwornice
Panel sterowania
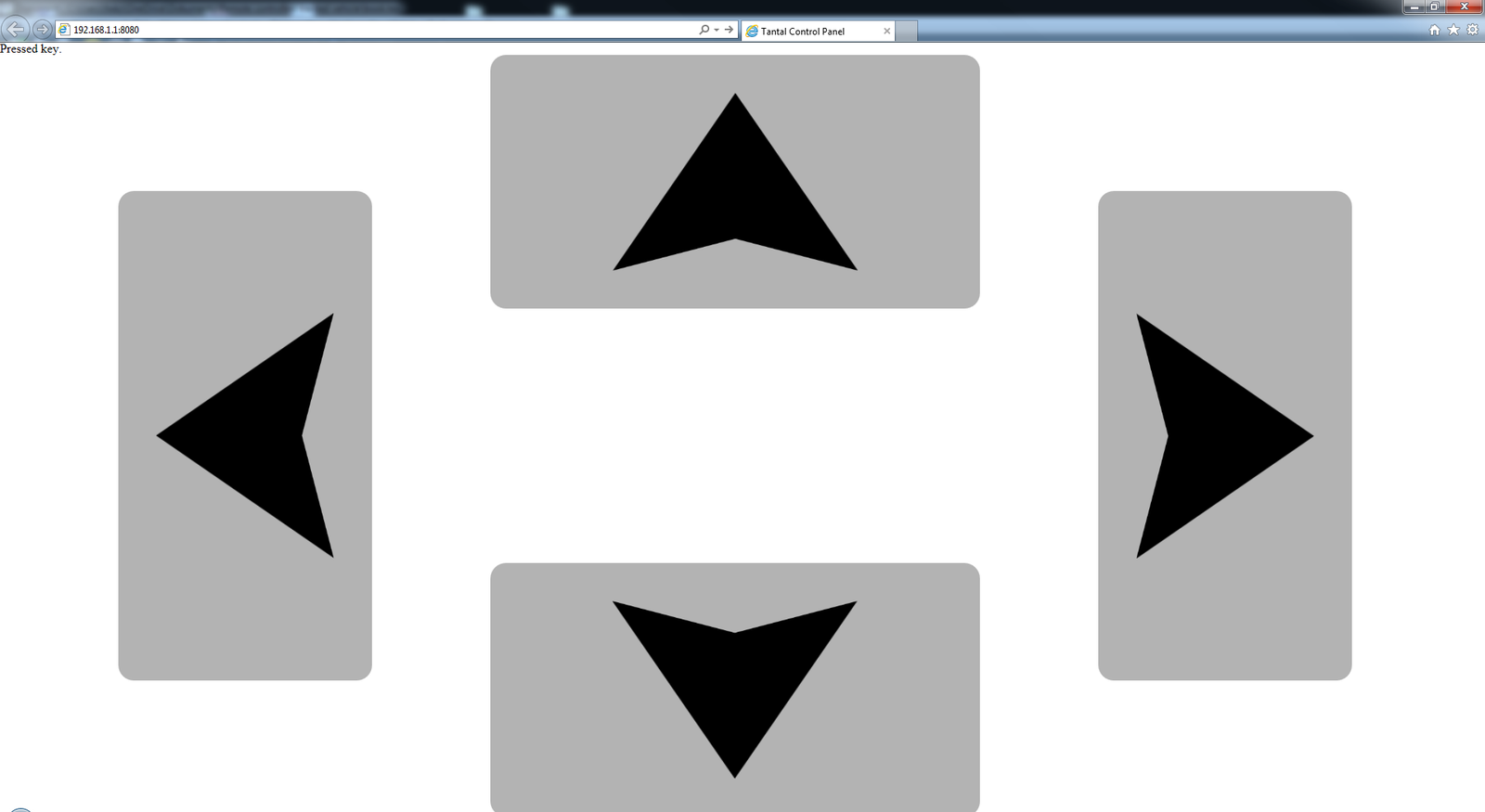
Panel sterowania
Panel sterowania
Panel sterowania
Zalety
- Możliwość pokonywania przeszkód terenowych.
- Zwiększona powierzchnia styku pojazdu z nawierzchnią pozwala na lepszą dystrybucje masy i wykluczenie grząźnięcia.
- Zerowy promień skrętu
Wady
- Mniejsza prędkość maksymalna
- Zwiększona złożoność mechaniczna
- Mogą niszczyć powierzchnię po której się poruszają
Układ bieżny
Układ bieżny
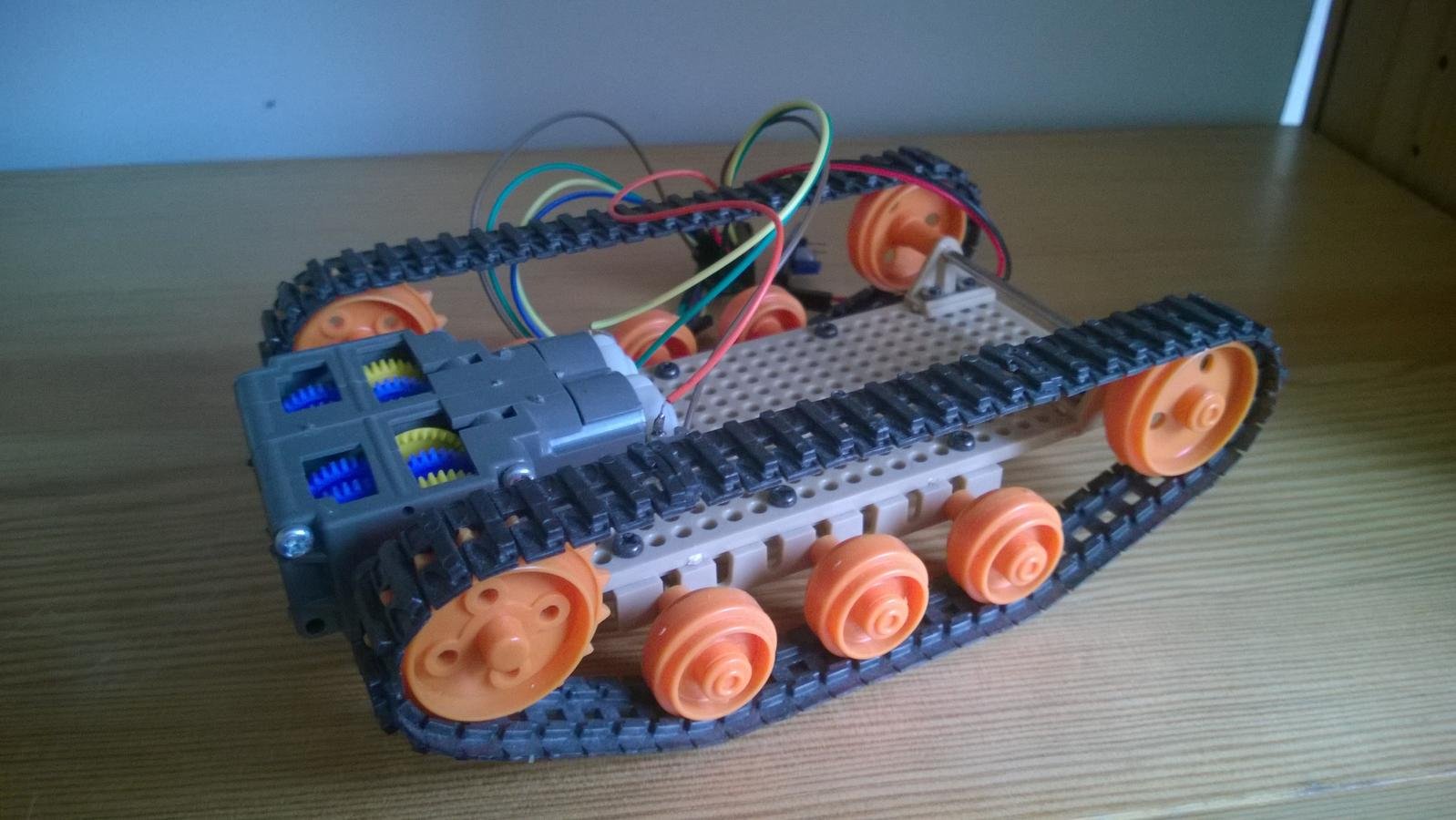
Podsumowanie
Postawione na początku pracy cele zostały zrealizowane. Jej wynikiem jest autonomiczne samobieżne podwozie o gąsienicowym układzie bieżnym.
Konstrukcję można w łatwy sposób rozszerzyć poprzez dodanie dodatkowych modułów funkcjonalnych w zależności od charakteru robota docelowego.
Zdalnie sterowany pojazd gąsienicowy
By fwkz