KD Tree
Outline
- Introduction
- Build
- Insert
- FindMin
- Delete
- K-Nearest
- Query Range
- Segment Tree
Introduction
KD-Tree = k-dimensional tree
一種在k維歐幾里德空間的資料結構
主要用於 範圍詢問 / 最鄰近詢問
Introduction
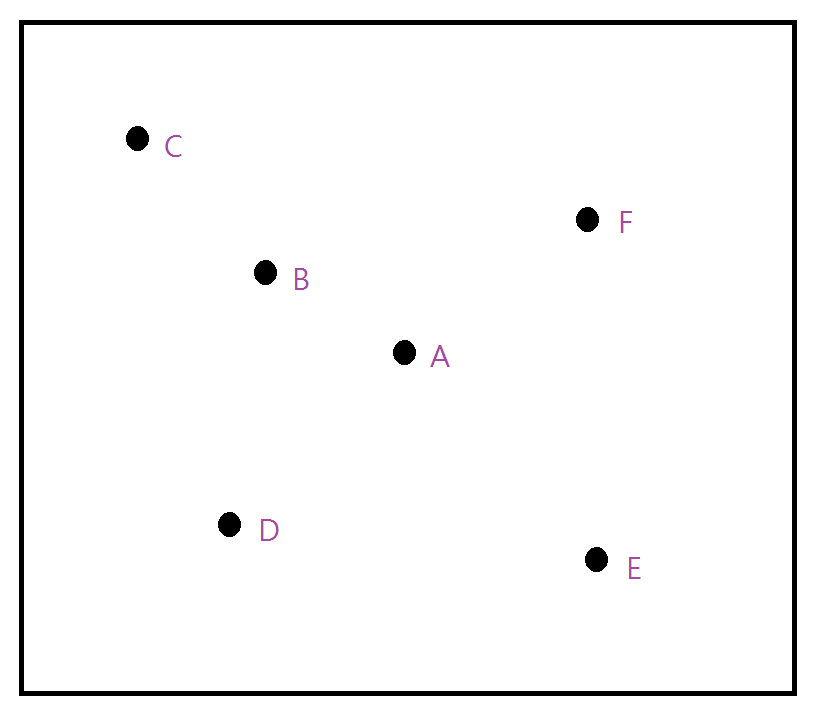
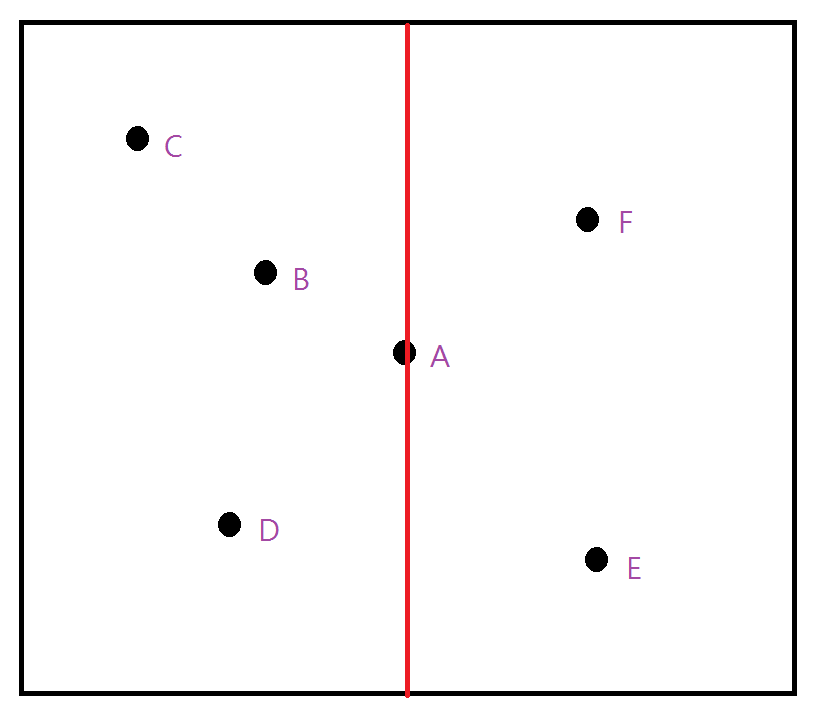
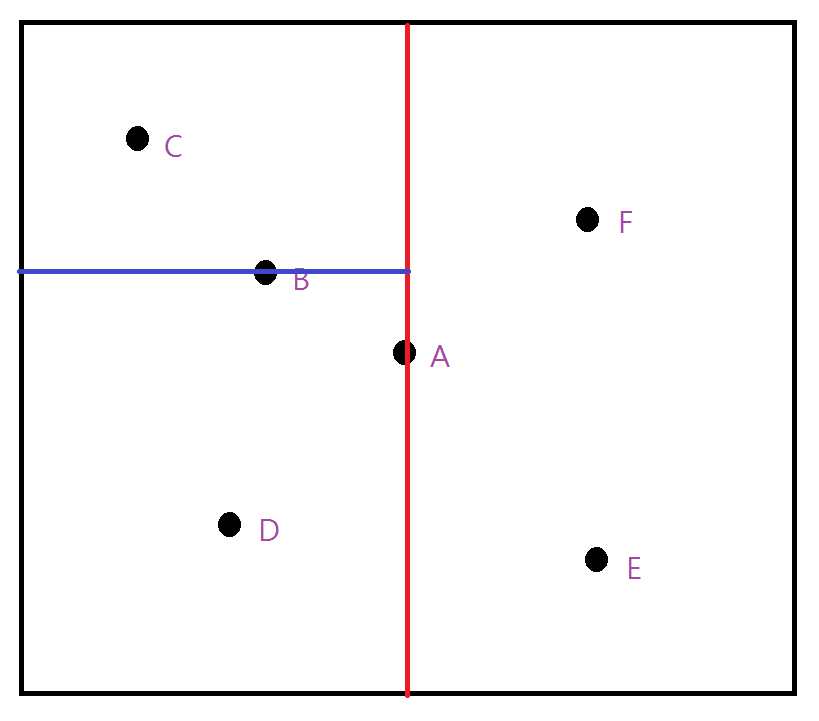
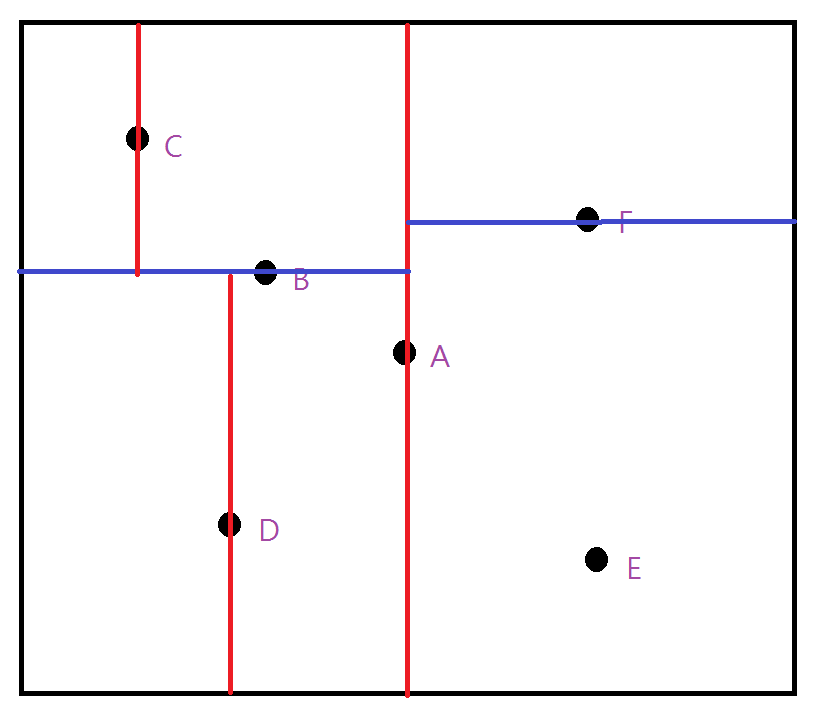
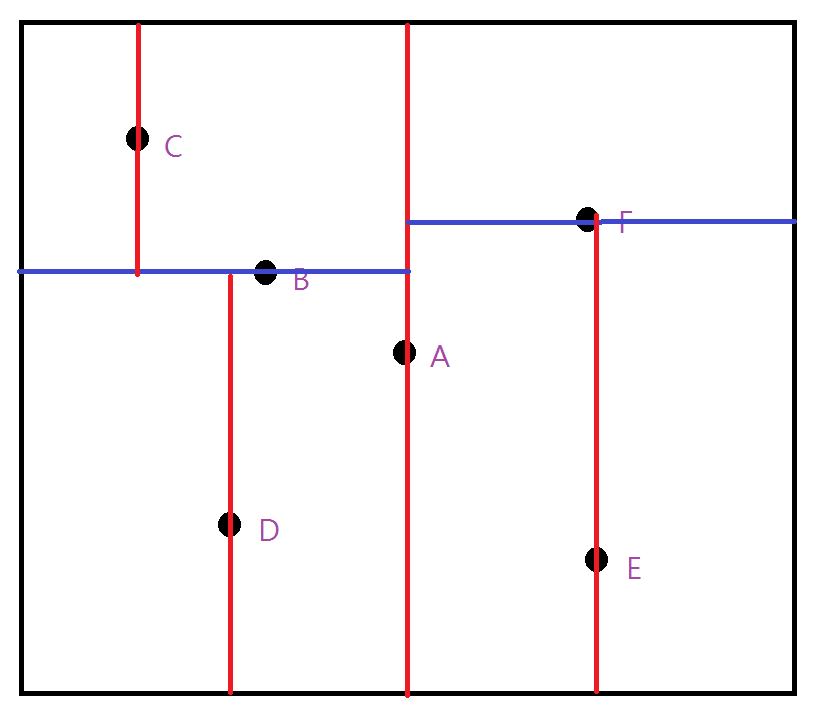
Build
以二元樹儲存
將範圍內的點以不同的維度輪流切割
以中位數作為該子樹的樹根
Build
Build
Build
Build
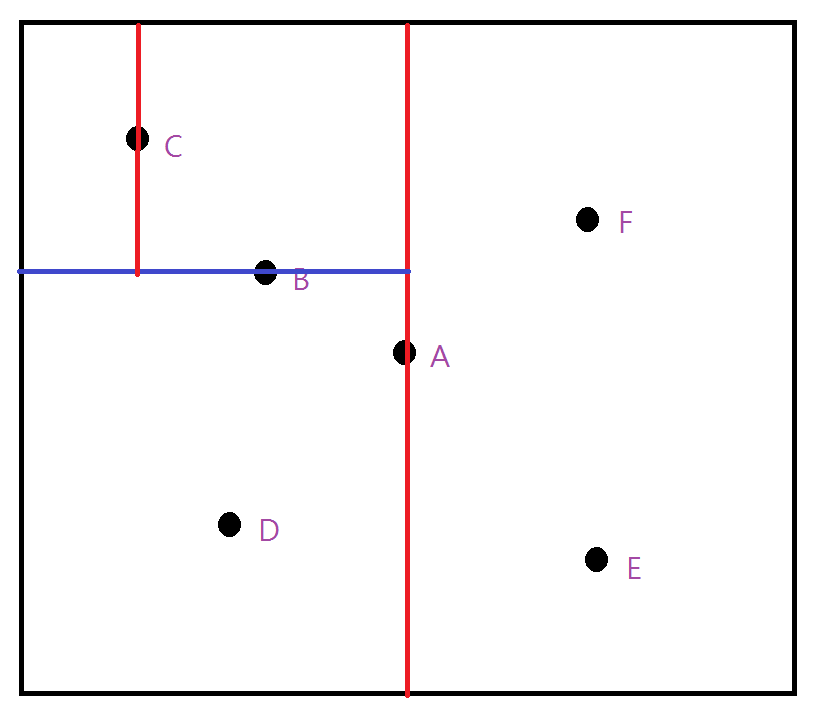
Build
Build
Build
Build
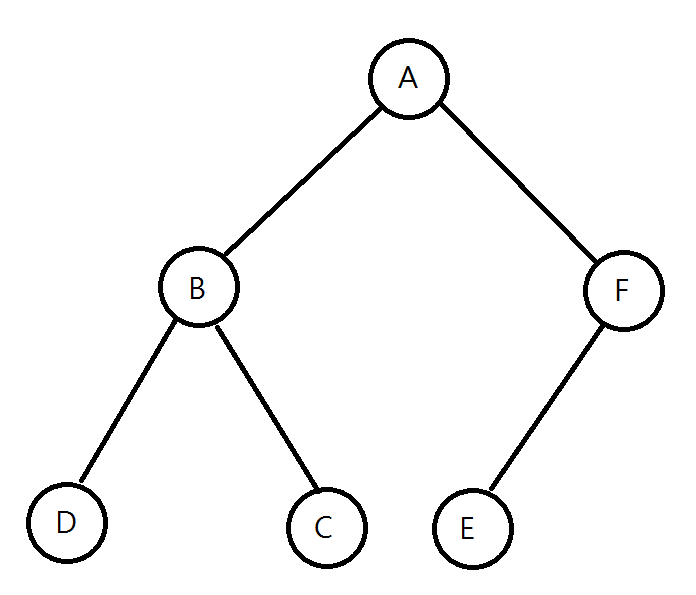
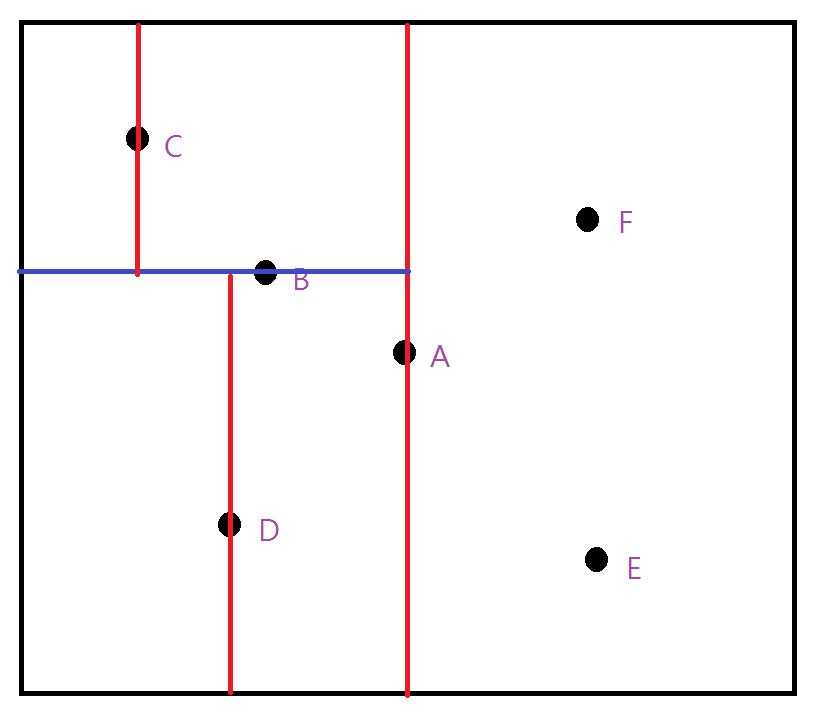
構造出的二元樹
Build
時間複雜度: O(NlogN)
找中位數: O(N) --- nth_element()
O(NlogN)
O(N)
--- nth_element()
T(N) = 2 * T(\frac{N}{2}) + O(N) = O(NlogN)
Insert
和一般二元樹的插入相同
依序用不同維度比較大小直到找到葉子
Insert
最壞複雜度: O(樹的高度) = O(N)
二元樹的平衡可能會被破壞
經典解法: 替罪羊樹
均攤後複雜度: O(logN)
O(N)
O(logN)
FindMin
找到該子樹在第k維下的最小點
Delete的時候會用到
FindMin
如果該子樹是用目標維度分割
左子樹不為空 => 遞迴左子樹
左子樹為空 => 回傳該子樹的根
FindMin
如果該子樹不是用目標維度分割
分別往左右子樹遞迴取最小值
FindMin
複雜度分析
最多會經過
複雜度: O(N1-1/k)
\alpha^{(k - 1) * \frac{log_{\alpha}{N}}{k}} = N^{1 - \frac{1}{k}}
O(N^{1-\frac{1}{k}})
Delete
有兩種方法
第一種: 真的刪除
第二種: 標記刪除
Delete
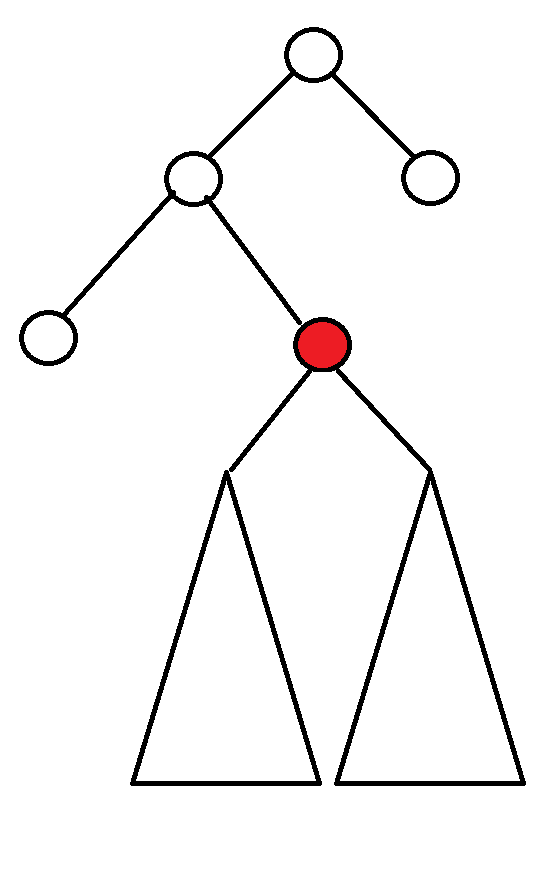
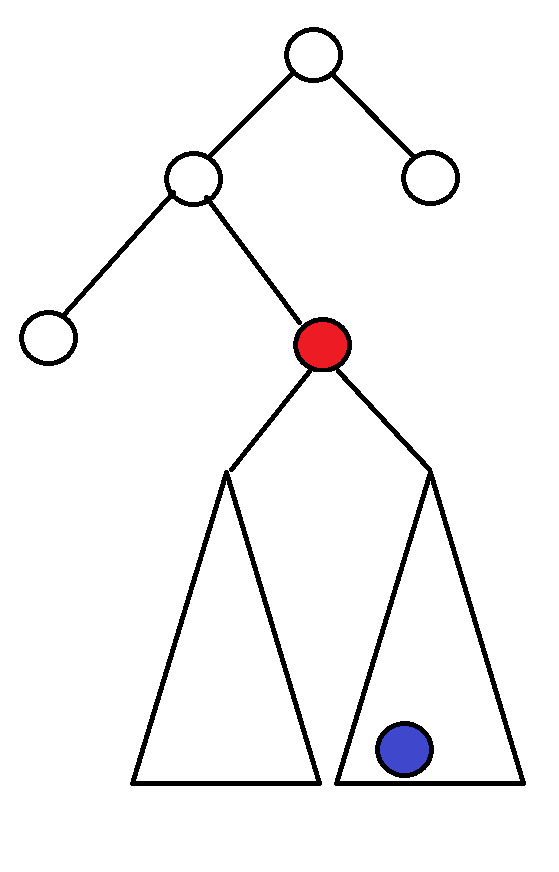
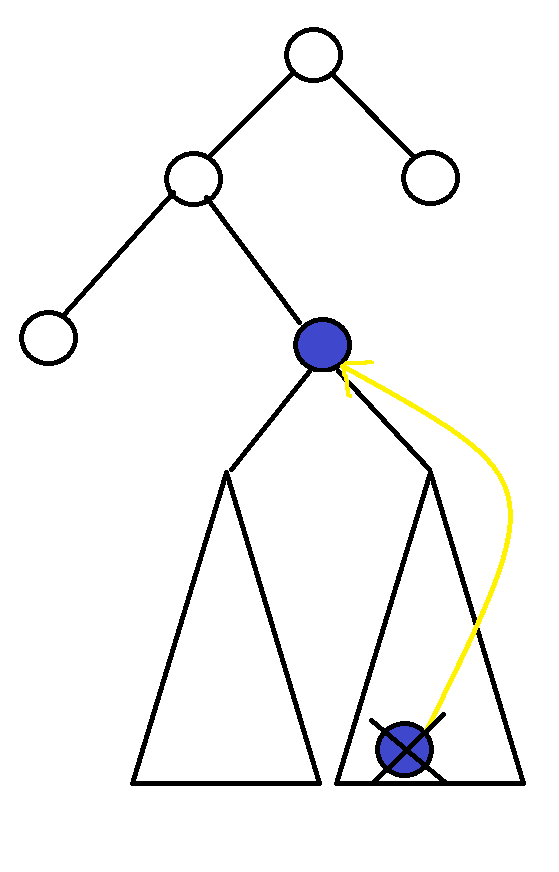
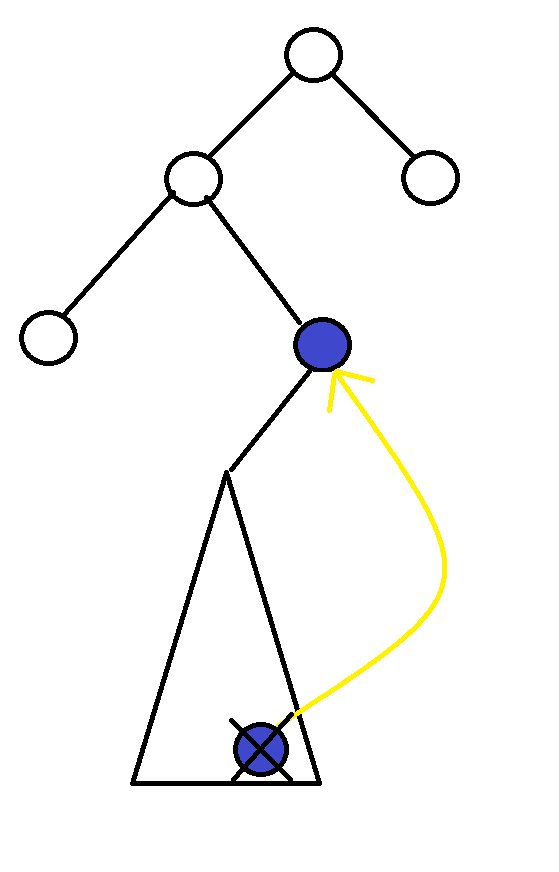
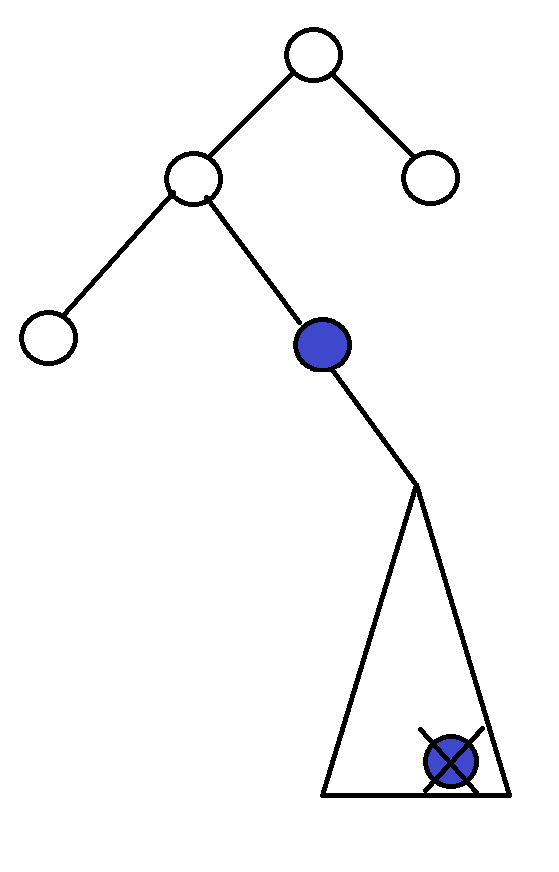
真的刪除
找到要刪除的點後有三種情況
右子樹不為空 => Delete 右子樹的 Min Node
左子樹不為空 => Delete 左子樹的Min Node
並把剩下的左子樹變成右子樹
左右子樹都為空 => 直接砍掉該子樹
Delete
右子樹不為空
Delete
右子樹不為空
Delete
右子樹不為空
Delete
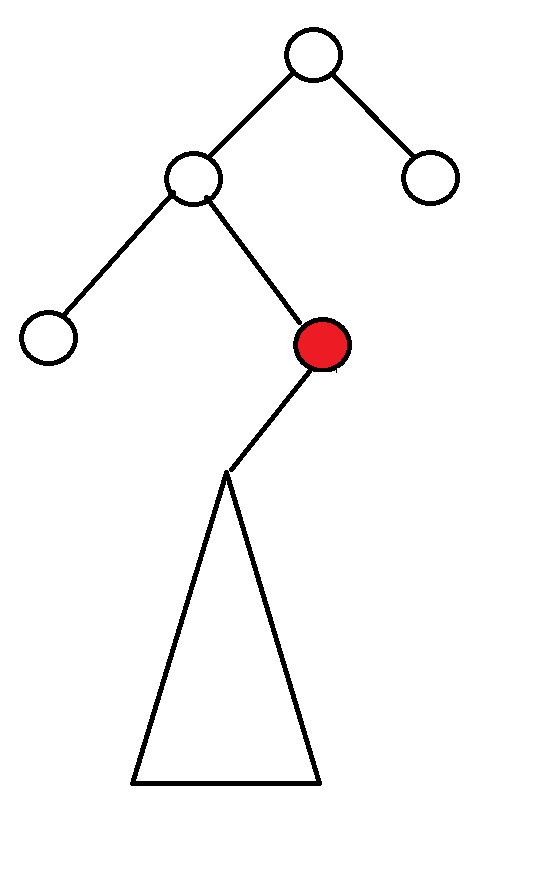
左子樹不為空
Delete
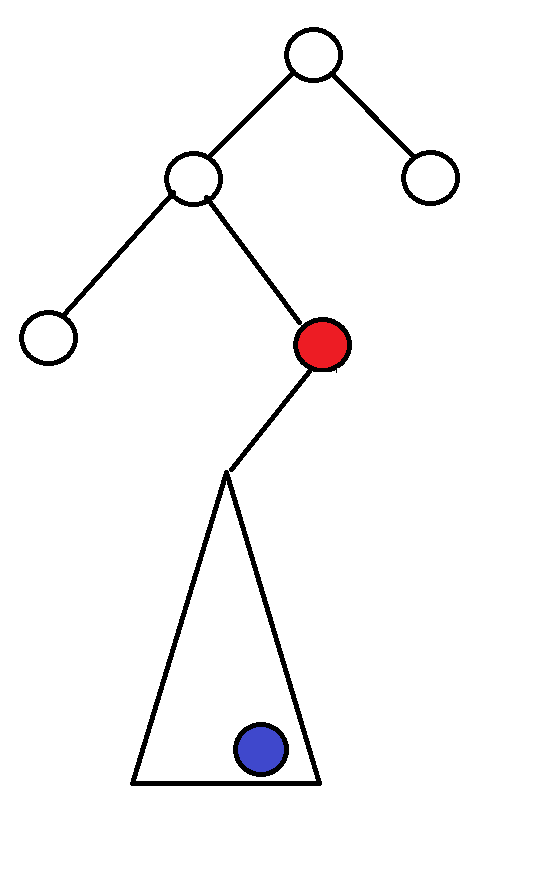
左子樹不為空
Delete
左子樹不為空
Delete
左子樹不為空
Delete
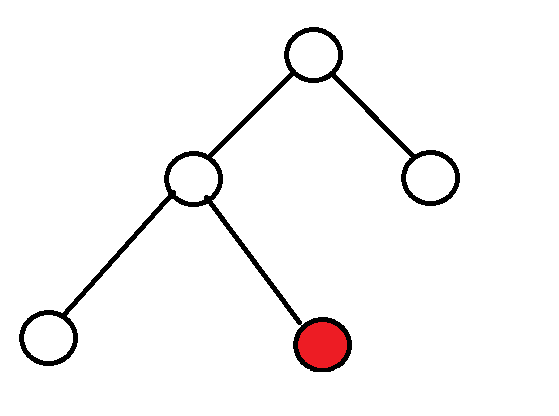
左右子樹都為空
Delete
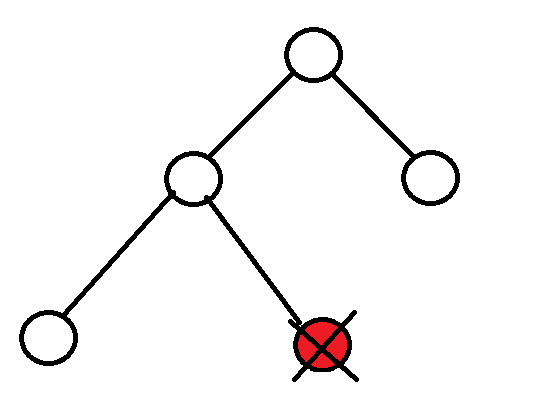
左右子樹都為空
Delete
複雜度分析
H = 樹的高度
O(FindMin + H)
複雜度 = O(findmin + h)
=
O(N^{1-\frac{1}{k}}+H)
Delete
標記刪除
找到要刪除的點後做標記
等重建的時候再把刪除的點拔掉
這方法在K-Nearest的時候會退化
但是有時候很方便
複雜度 = O(logN)
O(logN)
K-Nearest
給定一個點 P
求距離 P 最近的 K 個點
K-Nearest
可以用 priority_queue 維護最近的 K 個點
比較 P 和該子樹的點,判斷左子樹和右子樹誰比較近
和 Insert 類似
K-Nearest
如果左子樹比較近
如果搜尋結果不足 K 個
先往左子樹遞迴搜尋
先把此子樹的點放進結果並往右子樹搜尋
否則將此子樹的點放入結果並把結果中最遠的拔掉
如果右子樹的點有可能比結果中的更好就往右子樹遞迴
K-Nearest
result = priority_queue
Search(node, P, K)
if P is closer to left child:
Search(node->left, P, K)
if(size(result) < K):
push node->point into result
Search(node->right, P, K)
else:
if P is better than the farthest in result:
push node->point into result
if nodes in node->right may be better then point in result:
Search(node->right, P, K)
else:
passK-Nearest
複雜度分析
最差複雜度還是 O(N^1-1/k)
平均複雜度 O(logN)
O(logN)
O(N^{1-\frac{1}{k}})
Range Query
給定一個高維矩形
求矩形內的所有點
result = []
RangeQuery(node, L, R):
if node->point in [L, R]:
push node->point into result
if range of node->left is included by [L, R]:
RangeQuery(node->left, L, R)
if range of node->right is included by [L, R]:
RangeQuery(node->right, L, R)
Range Query
複雜度分析
P = 答案的數量
複雜度 = O(N^1-1/k + P)
O(N^{1-\frac{1}{k}}+P)
Segment Tree
可以用高維 KD-Tree 模擬高維線段樹
Segment Tree
單點更新
Update(node, P, v):
if node->point == P:
update node->point with v
return
if P is in node->left:
Update(node->left, P, v)
else:
Update(node->right, P, v)Segment Tree
單點查詢
Query(node, P):
if node->point == P:
return data of node->point
if P is in node->left:
Query(node->left, P)
else:
Query(node->right, P)Segment Tree
區間更新
Query(node, P):
if node->point == P:
return data of node->point
if P is in node->left:
Query(node->left, P)
else:
Query(node->right, P)Update(node, L, R, v):
if range of node in [L, R]:
update lazy tag of node with v
return
if node->point in [L, R]:
update data of node->point with v
if range of node->left is included by [L, R]:
Update(node->left, L, R, v)
if range of node->right is included by [L, R]:
Update(node->right, L, R, v)
Segment Tree
區間查詢
Query(node, L, R):
if range of node in [L, R]:
return data of node
result = None
if node->point in [L, R]:
update result with data of node->point
if range of node->left is included by [L, R]:
update result with Query(node->left, L, R)
if range of node->right is included by [L, R]:
update result with Query(node->right, L, R)
KD Tree
By allenwhale