
Занятие №13:
Методы градиента стратегии
Основные понятия
Определение
В методах, основанных на стратегии, вместо изучения функции ценности (Q-функция), которая сообщает нам, какова ожидаемая сумма вознаграждений с учетом состояния и действия, мы непосредственно изучаем функцию стратегии, которая сопоставляет состояние с действием. То есть мы выбираем действия без использования функции ценности.
Представление стратегии
Детерминированная стратегия
Нейронная сеть
0



Действия
Влево
Вправо
Вниз
Вверх
0
1
0
Стратегия
п(s) = a
Представление стратегии
Нейронная сеть
Стратегия
0.04
Действия
Влево
Вправо
Вниз
Вверх
0.06
0.7
0.2
п(a|s) = P(at|st)
Стохастическая стратегия
Преимущества и недостатки
- Сходимость;
- Эффективность в многомерных пространствах действий;
- Стохастические стратегии. Не нужно использовать жадную стратегию;
- Медленная сходимость. Локальные максимумы.
Сходимость
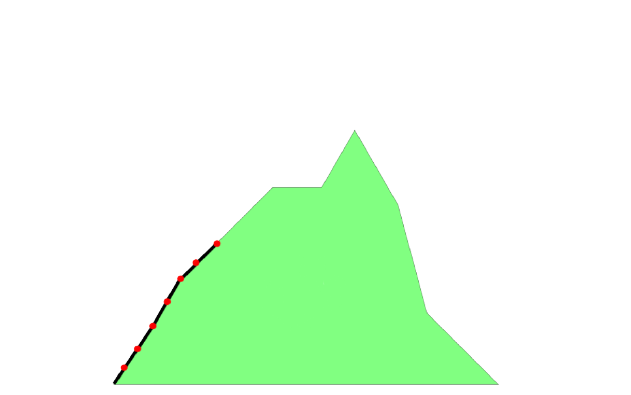
Локальный максимум
Глобальный максимум
Стратегия
Эффективность в многомерных пространствах действий
Градиенты стратегии
Идем вниз
Глубокое Q-обучение
Пожалуйста подожди, я все ещё считаю Q-значения для 3672 действий, чтобы дать лучшее значение


Стохастические стратегии
Стратегия
\pi_{\theta}(a|s) = P[a|s]
J_{1}(\theta) = E_{\pi}[G_{1}=R_{1} + \gamma*R_{2} + \gamma^{2}*R_{3} + ...] = E_{\pi}(V(s_{1}))
Функция оценки стратегии для эпизодической среды
Функция оценки стратегии для непрерывной среды
J_{avgv}(\theta) = E_{\pi}[V(s)] = \sum d(s)V(s)
d(s) = \frac{N(s)}{\sum_{s{}'}N(s{}')}
Градиентный подъем
Стратегия:
Целевая функция:
Градиент:
Обновление:
\pi_{\theta}
J(\theta)
\triangledown_{\theta} J(\theta)
\theta \leftarrow \theta + \alpha \triangledown_{\theta} J(\theta)
Максимизация оценки:
\theta = argmaxE_{\pi_{\theta}}[\sum R(s_{t}, a_{t})]
Градиентный подъем
Для магистров
Градиент стратегии:
E_{\pi}[\triangledown_{\theta}(log\pi(s,a,\theta))R(\tau )]
\Delta \theta = \alpha * \triangledown_{\theta}(log\pi(s,a,\theta))R(\tau)
Обновление:
Функция политики
Функция оценки
Код
import tensorflow as tf
from tensorflow.keras.layers import Input, Dense, Conv2D, Flatten, BatchNormalization, ReLU, InputLayer
from tensorflow.keras.optimizers import Adam
import gym
import numpy as np
from collections import deque
import random
import vizdoomgym
from datetime import datetime
env = gym.make('VizdoomDefendCenter-v0')
n_outputs = env.action_space.n
observation = env.reset()
plt.imshow(observation)
plt.show()
Код preprocess_frame
def preprocess_frame(frame):
# Добавляем оттенок серого
frame = np.mean(frame,-1)
# Обрезать экран (удалить часть, не содержащую информации)
# [вверх: вниз, влево: вправо]
cropped_frame = frame[15:-5,20:-20]
# Нормализация значений пикселей
normalized_frame = cropped_frame/255.0
# Изменение размера
preprocessed_frame = transform.resize(cropped_frame, [240,320])
return preprocessed_frameКод stack_frames
stack_size = 4 # Складываем 4 кадра
stacked_frames = deque([np.zeros((240,320), dtype=np.int)
for i in range(stack_size)], maxlen=4)
def stack_frames(stacked_frames, state, is_new_episode):
frame = preprocess_frame(state)
if is_new_episode:
# Очистить наш stacked_frames
stacked_frames = deque([np.zeros((240,320), dtype=np.int)
for i in range(stack_size)], maxlen=4)
stacked_frames.append(frame)
stacked_frames.append(frame)
stacked_frames.append(frame)
stacked_frames.append(frame)Код stack_frames
# Сложить кадры
stacked_state = np.stack(stacked_frames, axis=2)
else:
# Добавить кадр в двухстороннюю очередь,
# автоматически удалив самый старый фрейм
stacked_frames.append(frame)
# Создайте сложенное (stacked) состояние
stacked_state = np.stack(stacked_frames, axis=2)
return stacked_state, stacked_framesГиперпараметры
# Гиперпараметры
state_size = [240,320,4]
action_size = env.action_space.n
learning_rate = 0.00025
total_episodes = 50 # Общее количество эпизодов
max_steps = 50 # Максимально возможное количество шагов в эпизоде
batch_size = 64
explore_start = 1.0 # Вероятность исследования на старте
explore_stop = 0.01 # Минимальная вероятность исследования
decay_rate = 0.0001 # Скорость затухания для исследованийГиперпараметры
# Q learning параметры
gamma = 0.95 # Коэффициент дисконтирования
# Количество опытов, сохраненных в памяти при первой инициализации
pretrain_length = batch_size
# Количество опытов, которые может сохранить память
memory_size = 1000000 Код
possible_actions = np.identity(action_size, dtype=int).tolist()
img_array = []
img_array_test= []
print(possible_actions)[[1, 0, 0],
[0, 1, 0],
[0, 0, 1]]Код
#Веса модели будут сохраняться в папку Models.
Save_Path = 'Models'
if not os.path.exists(Save_Path):
os.makedirs(Save_Path)
path = '{}_PG'.format("Name")
Model_name = os.path.join(Save_Path, path)Код REINFORCEAgent
class REINFORCEAgent:
def __init__(self, env):
self.env = gym.make(env)
self.state_dim = [240,320,4]
self.action_dim = self.env.action_space.n
self.states, self.actions, self.rewards = [], [], []
self.model = self.create_model(input_shape=self.state_dim,
action_space = self.action_dim)Код REINFORCEAgent
def create_model(self, input_shape, action_space):
X_input = Input(input_shape)
X = Conv2D(filters = 32, kernel_size = [6,6], strides = [4,4],
padding = "VALID", activation="relu")(X_input)
X = Conv2D(filters = 64, kernel_size = [3,3], strides = [2,2],
padding = "VALID", activation="relu")(X)
X = Flatten(input_shape=input_shape)(X)
X = Dense(512, activation="elu")(X)
X = Dense(64, activation="elu")(X)
action = Dense(action_space, activation="softmax")(X)
model = tf.keras.Model(inputs = X_input, outputs = action)
model.compile(loss='categorical_crossentropy',
optimizer=Adam(learning_rate=0.005))
return modelКод REINFORCEAgent
def remember(self, state, action, reward):
self.states.append(state)
action_one_hot = np.zeros([self.action_dim])
action_one_hot[action] = 1
self.actions.append(action_one_hot)
self.rewards.append(reward)
# Используем выходные данные policy network и
# выбираем действие стохастически (Стохастическая стратегия)
def get_action(self, state):
state = np.reshape(state, (1, *state.shape))
policy = self.model.predict(state).flatten()
return np.random.choice(self.action_dim, 1, p=policy)[0]Код discount_rewards
def discount_rewards(self, reward):
running_add = 0
discounted_r = np.zeros_like(reward)
for i in reversed(range(0,len(reward))):
if reward[i] != 0:
running_add = 0
running_add = running_add * gamma + reward[i]
discounted_r[i] = running_add
# нормализация результата
# discounted_r =
# делим его на среднеквадратичное отклонение
# discounted_r =
return discounted_rКод REINFORCEAgent
def replay(self):
states = np.array(self.states, ndmin=3)
actions = np.array(self.actions)
discounted_r = self.discount_rewards(self.rewards)
self.model.fit(states, actions, sample_weight=discounted_r,
epochs=1, verbose=0)
self.states, self.actions, self.rewards = [], [], []
def load(self, Model_name):
self.model = load_model(Model_name, compile=True)
def save(self, Model_name):
self.model.save('ModelPG' + '.h5')Код train
def train(self, max_episodes=10, stacked_frames=None):
if os.path.exists("Models/Name_PG.h5"):
self.model.load("Models/Name_PG")
print("Модель загружена")
for ep in range(max_episodes):
done, total_reward = False, 0
state = self.env.reset()
state, stacked_frames = stack_frames(stacked_frames, state, True)
while not done:
action = self.get_action(state)
next_state, reward, done, _ = self.env.step(action)
img_array.append(next_state)
self.remember(state, action, reward)
next_state, stacked_frames = stack_frames(stacked_frames, next_state, False)
total_reward += reward
state = next_state
if done:
self.replay()
print('Эпизод {} Награда = {}'.format(ep, total_reward))
if ep % 5 == 0:
self.model.save("Models/Name_PG")
self.env.close()Код test
def test(self, Model_name, stacked_frames = stacked_frames):
self.model.load(Model_name)
for ep in range(2):
done, total_reward = False, 0
state = self.env.reset()
state, stacked_frames = stack_frames(stacked_frames, state, True)
while not done:
action = self.get_action(state)
next_state, reward, done, _ = self.env.step(action)
img_array_test.append(next_state)
self.remember(state, action, reward)
next_state, stacked_frames = stack_frames(stacked_frames, next_state, False)
total_reward += reward
state = next_state
if done:
print("Эпизод: {}/{}, общая награда: {}".format(e, 10, total_reward))
break
self.env.close()Наконец начинаем тренировку
env = gym.make('VizdoomDefendCenter-v0')
agent = REINFORCEAgent(env)
agent.train(max_episodes=10, stacked_frames = stacked_frames)
#Тест
agent.test("Models/Name_PG", stacked_frames = stacked_frames)Записываем видео
from random import choice
from google.colab.patches import cv2_imshow
import skvideo.io
out_video = np.empty([len(img_array), 240, 320, 3],
dtype = np.uint8)
out_video = out_video.astype(np.uint8)
for i in range(len(img_array)):
frame = img_array[i]
out_video[i] = frame
skvideo.io.vwrite("doom_defend_center.avi", out_video)Результат


Спасибо за понимание!
Занятие 13. Методы градиента стратегии
By Astro Group



