Carol Cuesta-Lazaro

IAIFI Fellow - Institute for Artificial Intelligence and Fundamental Interactions (MIT)
Deep Generative AI:
Inteligencia Artificial y sus aplicaciones en Física
Latam
Summer School
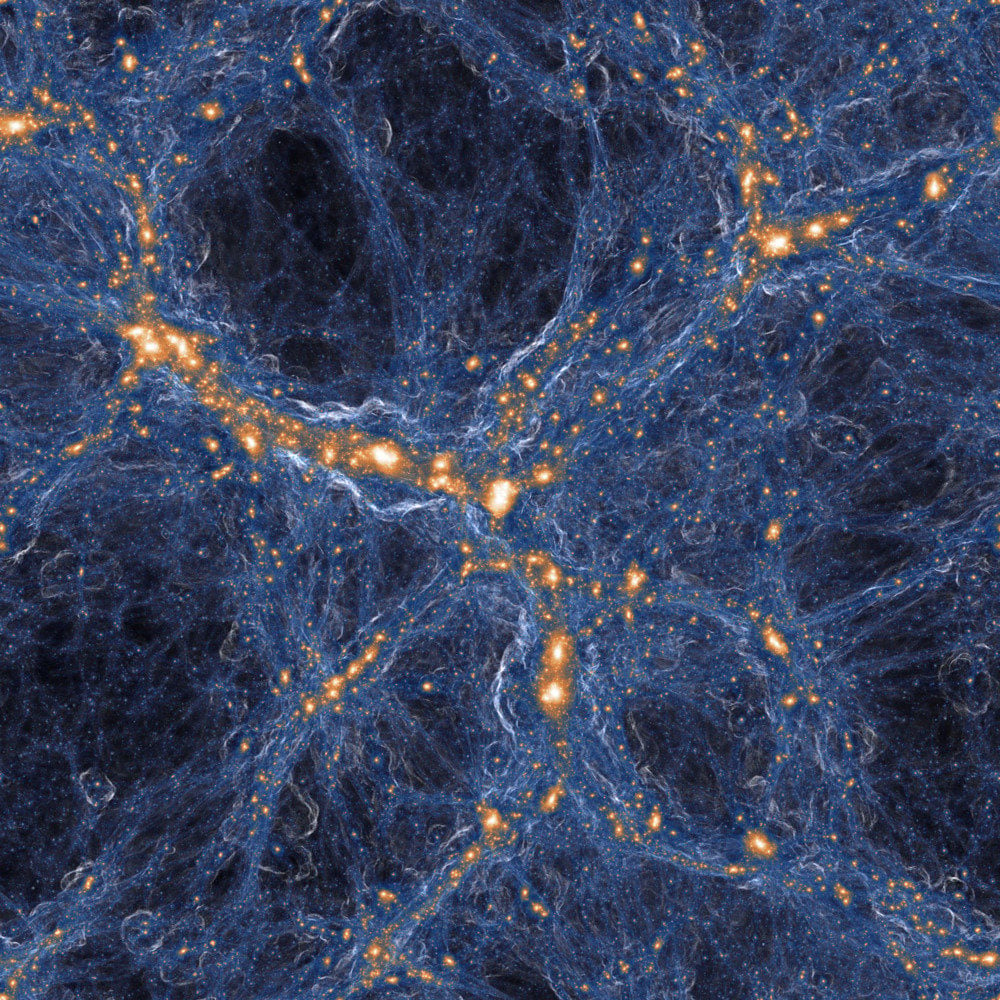
Las condiciones iniciales del Universo
Laws of gravity
Distribucion 3D de galaxias
Cuales son las CIs de NUESTRO Universo?
non-Gaussianidad primordial?
Inflacion
Galaxy formation
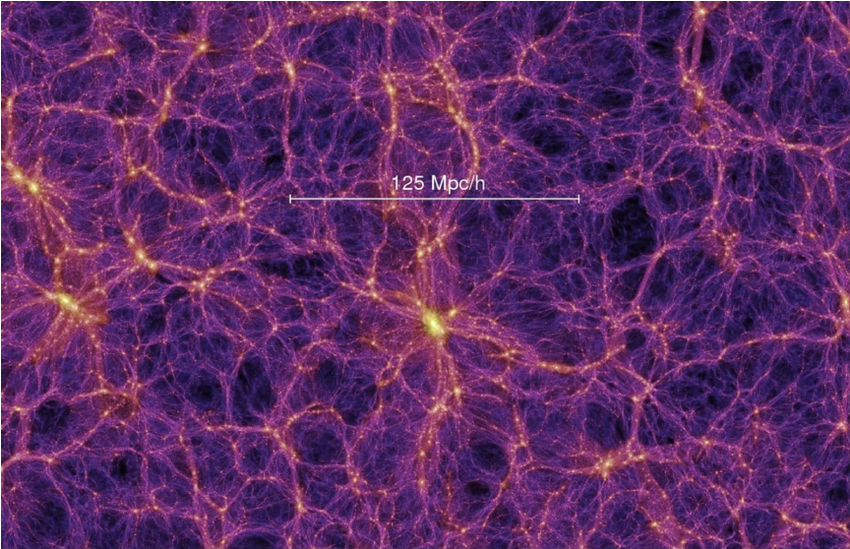
Distribucion 3D de materia oscura
Modificar GR en escalas grandes?
Como se forman las galaxias?
jerarquia de las masas de neutrinos?
AI y Fisica
- Que son los modelos generativos?
- Mis favoritos: likelihood-based
- Normalising flows
- Variational Autoencoders
- Variational Inference
- Diffusion models
Generar vs Discriminar
p(x)
p(y|x)
p(x|y) = \frac{p(y|x)p(x)}{p(y)}
p(x|y)
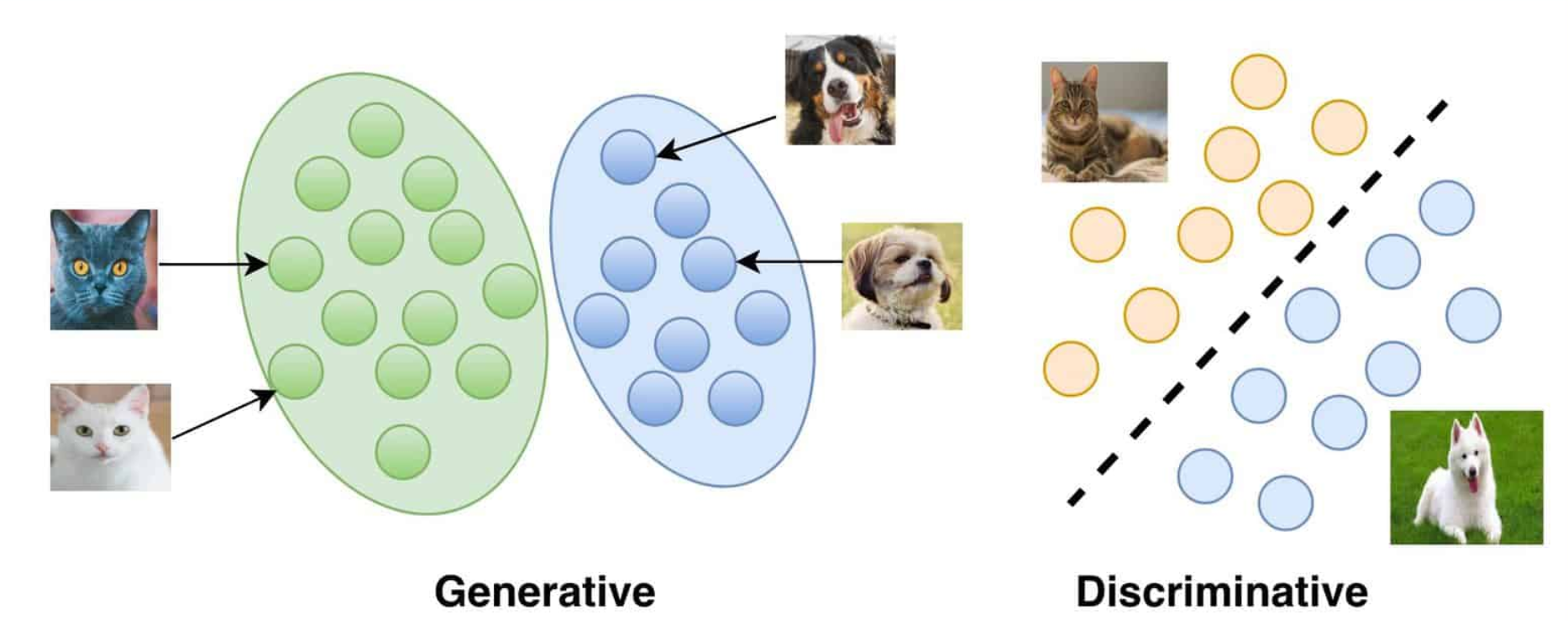
https://vitalflux.com/generative-vs-discriminative-models-examples/
El salón de la Fama

A teddy bear wearing a motorcycle helmet and cape is standing in front of Loch Awe with Kilchurn Castle behind him driving a speed boat near the Golden Gate Bridge
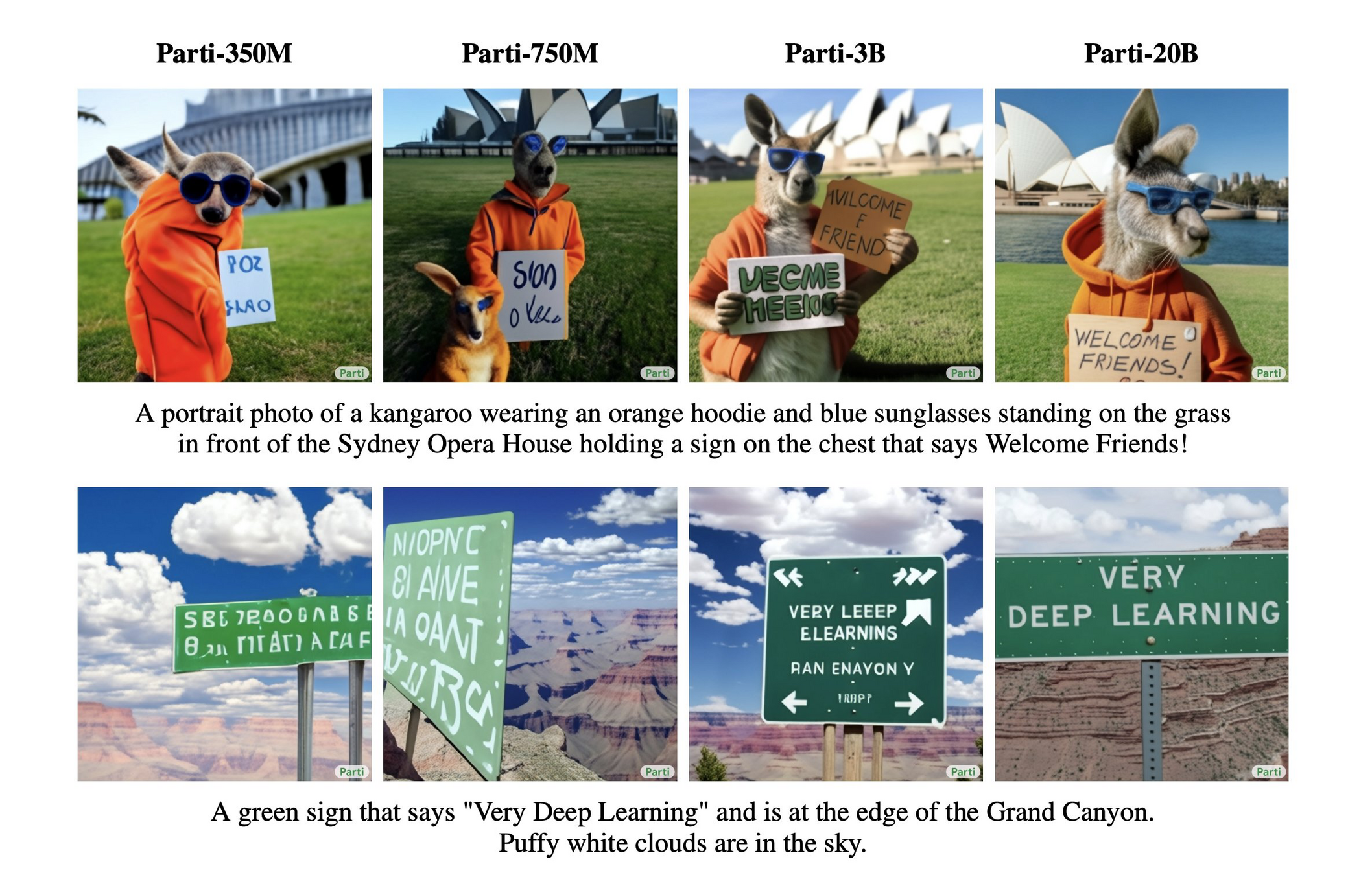
https://parti.research.google

Modelos generativos en Fisica
Emular procesos complejos en dimensiones altas
x \sim p(x|y)
y = \{ \Omega_{cdm}, \sigma_8, ... \}
arXiv:2206.04594
Super resolución
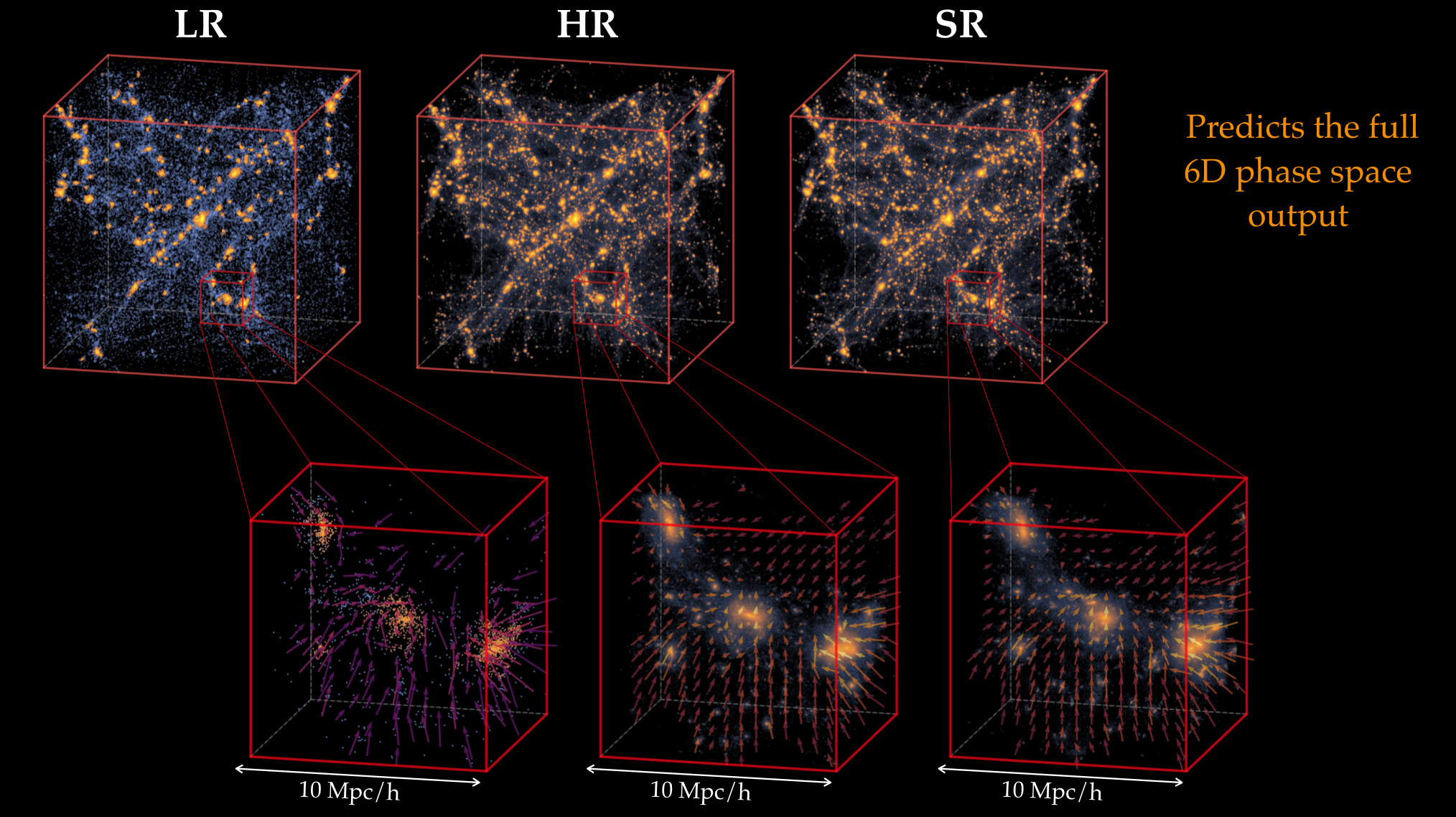
arxiv:2010.06608
Modelos generativos en Fisica
Detectar anomalias

arxiv:2010.14554
Modelos generativos en Fisica
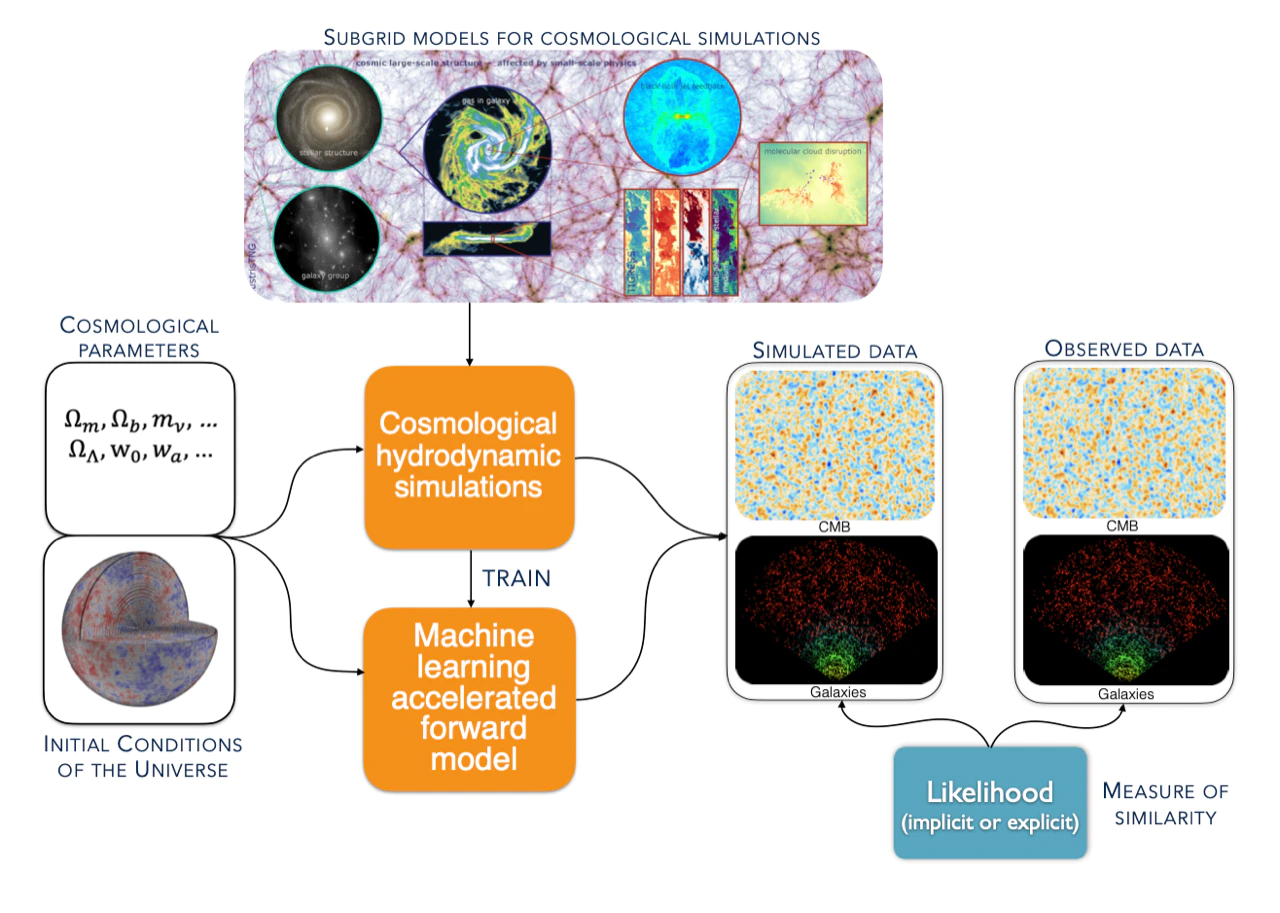
Comparar datos y simulaciones de forma optima:
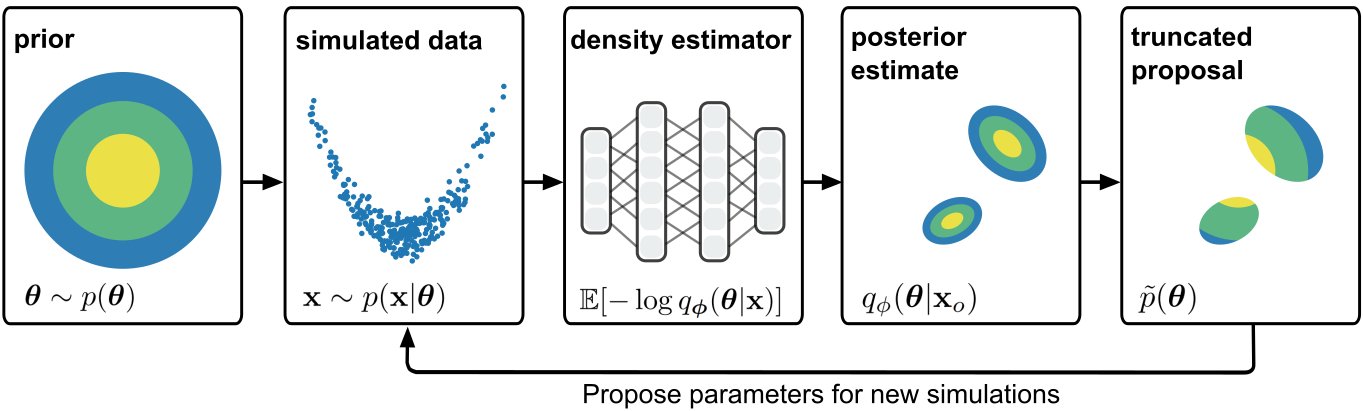
Simulation-based Inference
Modelos generativos en Fisica
arXiv:1911.01429
Modelar incertidumbres

arxiv:2010.14554
Modelos generativos en Fisica
Universo actual
Condiciones Iniciales
Representar priors complejos
arxiv:2206.14820
Modelos generativos en Fisica
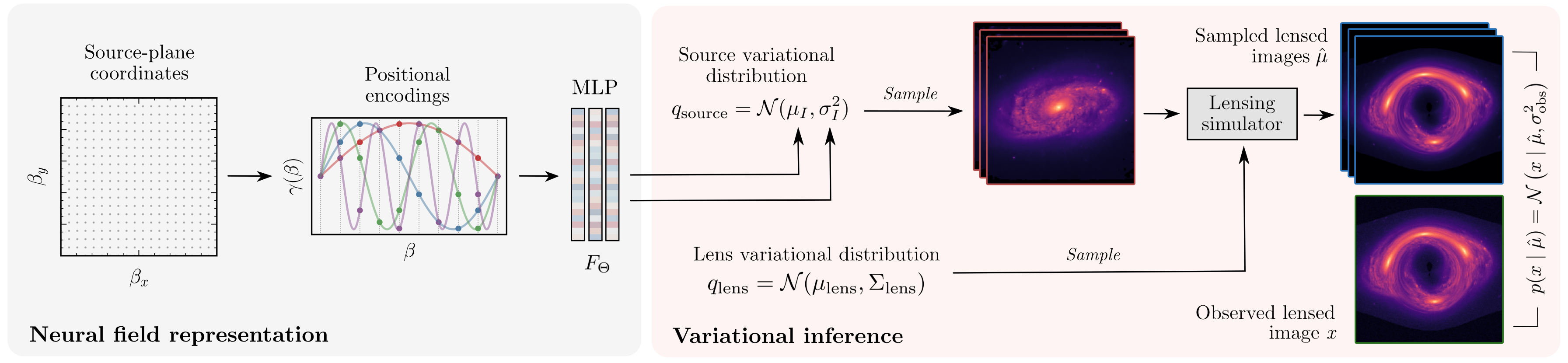
prior en galaxies?
Lente
gravitacional
Modelos Generativos
p_\phi(x)
Datos
Una PDF que podamos parametrizar
Maximizar el likelihood!
(o algo que se le parece)
2. Generar muestras
x \sim p_\phi(x)

1. Estimar densidades
p_\phi(x)
Maximizar el likelihood (o algo que se le parezca)
p(\theta|X) = \frac{p(X|\theta)p(\theta)}{p(X)}
Posterior
Likelihood
Prior
Evidence

Distribucion base
Distribucion destino (target)
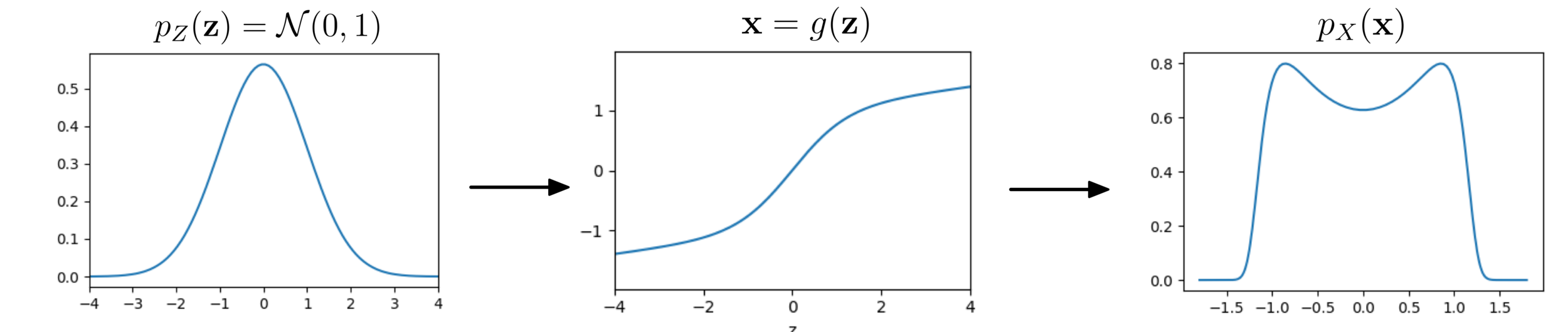
p_X(x) = p_Z(z) \left| \frac{dz}{dx}\right|
Z \sim \mathcal{N} (0,1) \rightarrow g(z) \rightarrow X
Normalising flows: Cambio de variables
Transformacion Invertible
z \sim p_Z(z)
p_Z(z)
\mathrm{Uniform(0,1)} \rightarrow U_1, U_2
Z_0 = \sqrt{-2 \ln U_1} \cos(2 \pi U_2)
Z_1 = \sqrt{-2 \ln U_1} \sin(2 \pi U_2)
Z_0, Z_2 \leftarrow N(0,1)

Transformacion Box-Muller: Normalising flows en 1934
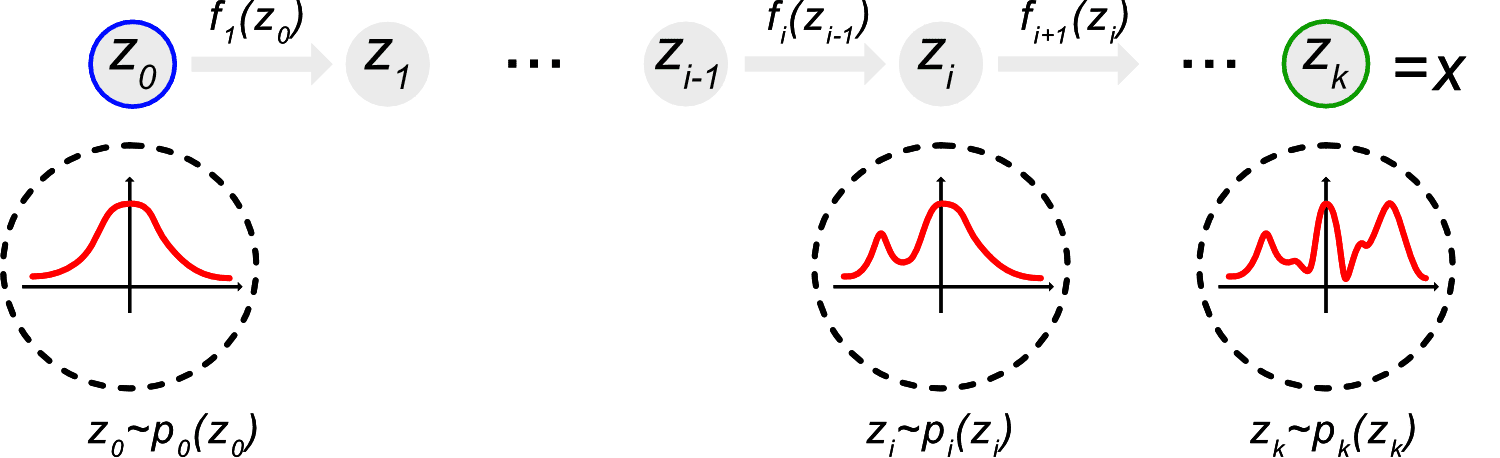
x = f(z), \, z = f^{-1}(x)
p(\mathbf{x}) = p_z(f^{-1}(\mathbf{x})) \left\vert \det J(f^{-1}) \right\vert
(Image Credit: Phillip Lippe)
p(x) = \int dz \, p(x|z)
z: Variables latentes
Normalising flows
Normalising flows
No es tan fácil encontrar funciones invertibles!
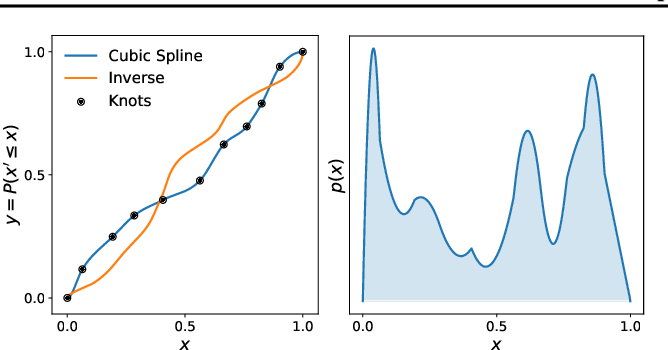
Splines
arXiv:2202.05282
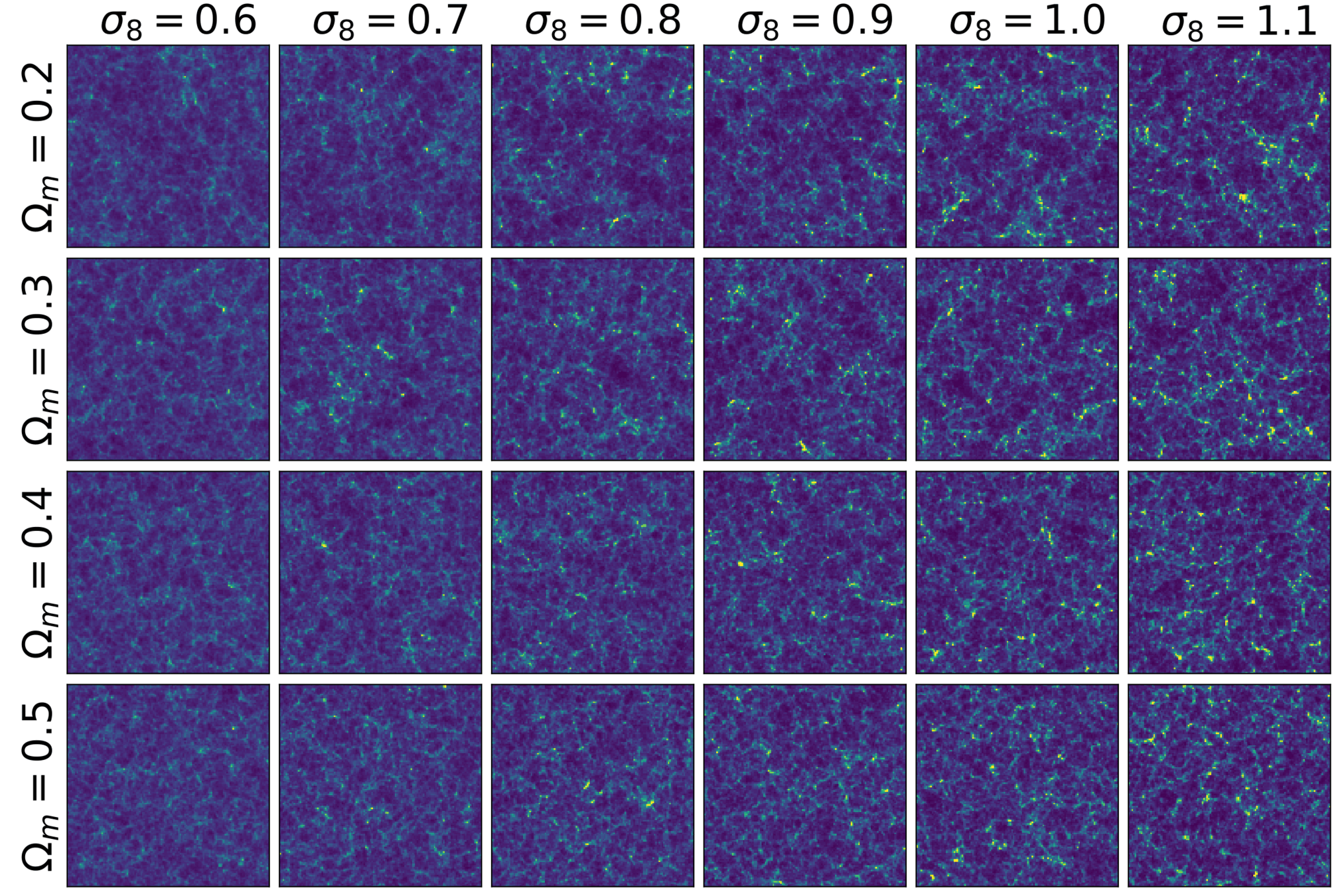
Normalising flows en cosmologia

Normalising flows en cosmologia
arXiv:2202.05282
arXiv:2202.05282
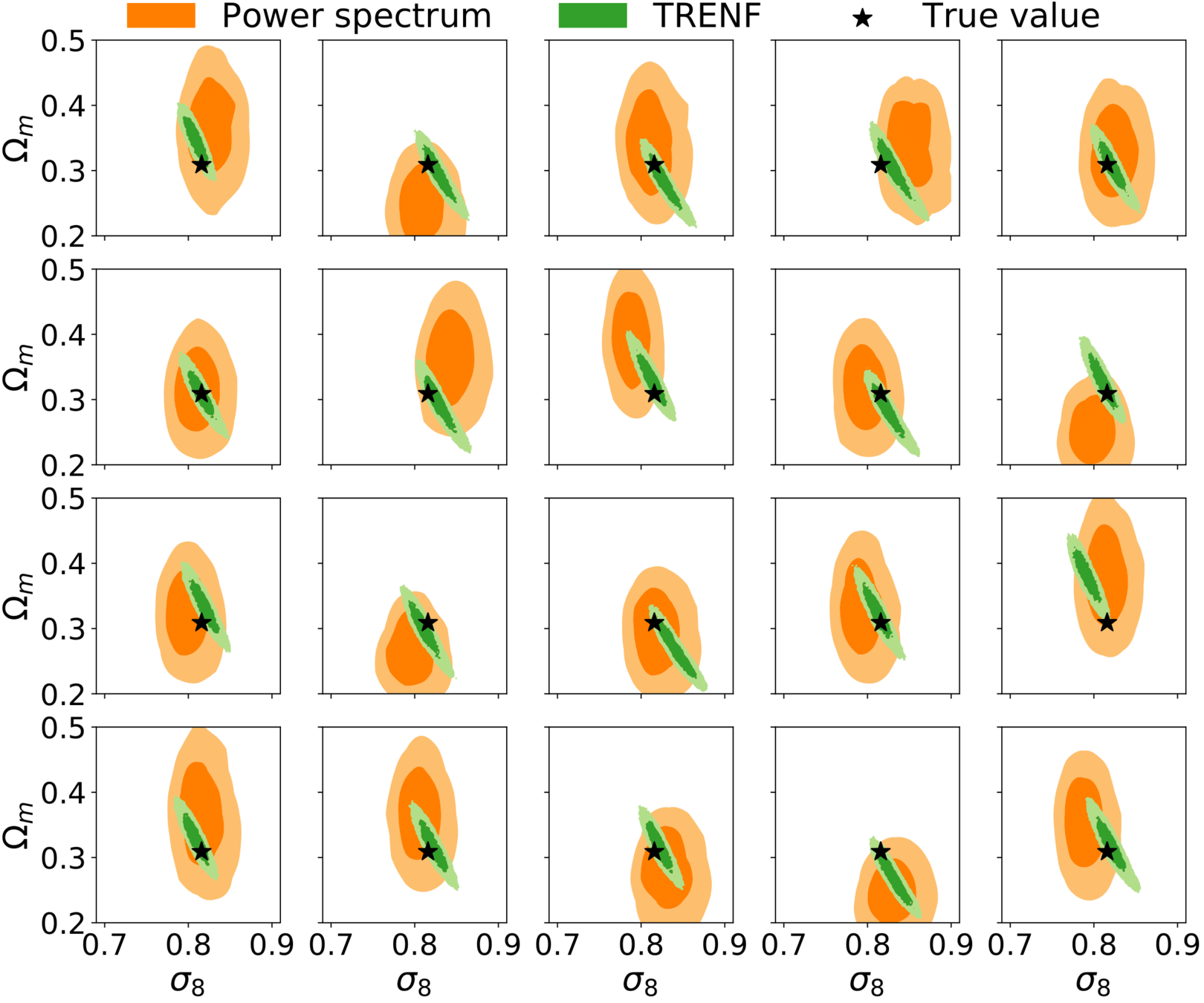
Normalising flows en cosmologia
Simulation-based Inference
arXiv:1911.01429

arxiv:2211.00723
Simulation-based Inference en cosmology

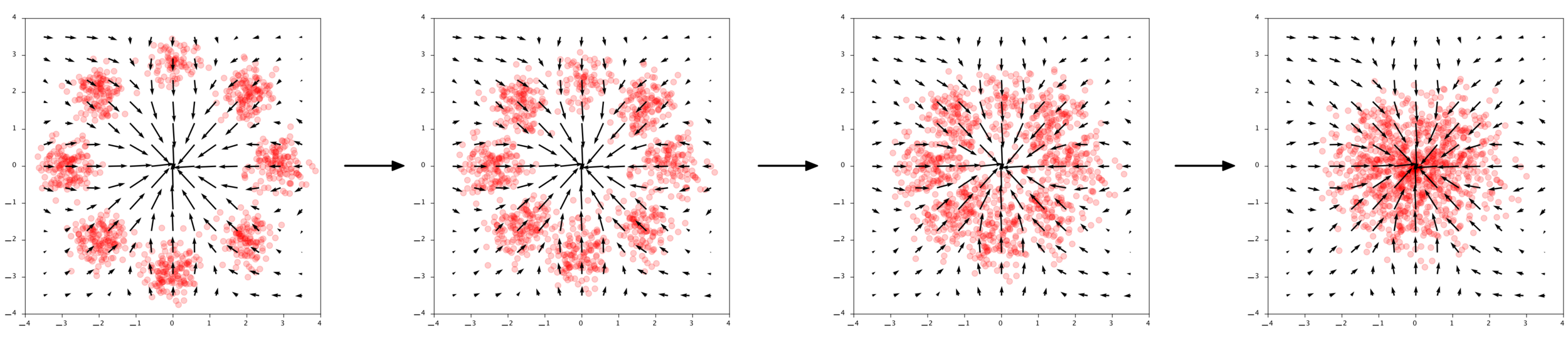
Las soluciones de ecuaciones diferenciales ordinarias (ODEs) son siempre invertibles!
z = x + \int_0^1 \phi (x(t)) dt
x = z + \int_1^0 \phi (x(t)) dt
\log p_X(x) = \log p_Z(z) + \int_0^1 \mathrm{Tr} J_\phi (x(t)) dt
Problemas NFs: Falta expresividad
- Function invertible
- Jacobiano tratable
Chen et al. (2018), Grathwohl et al. (2018)
z = x + \int_0^1 \phi (x(t)) dt
Variational Auto Encoders
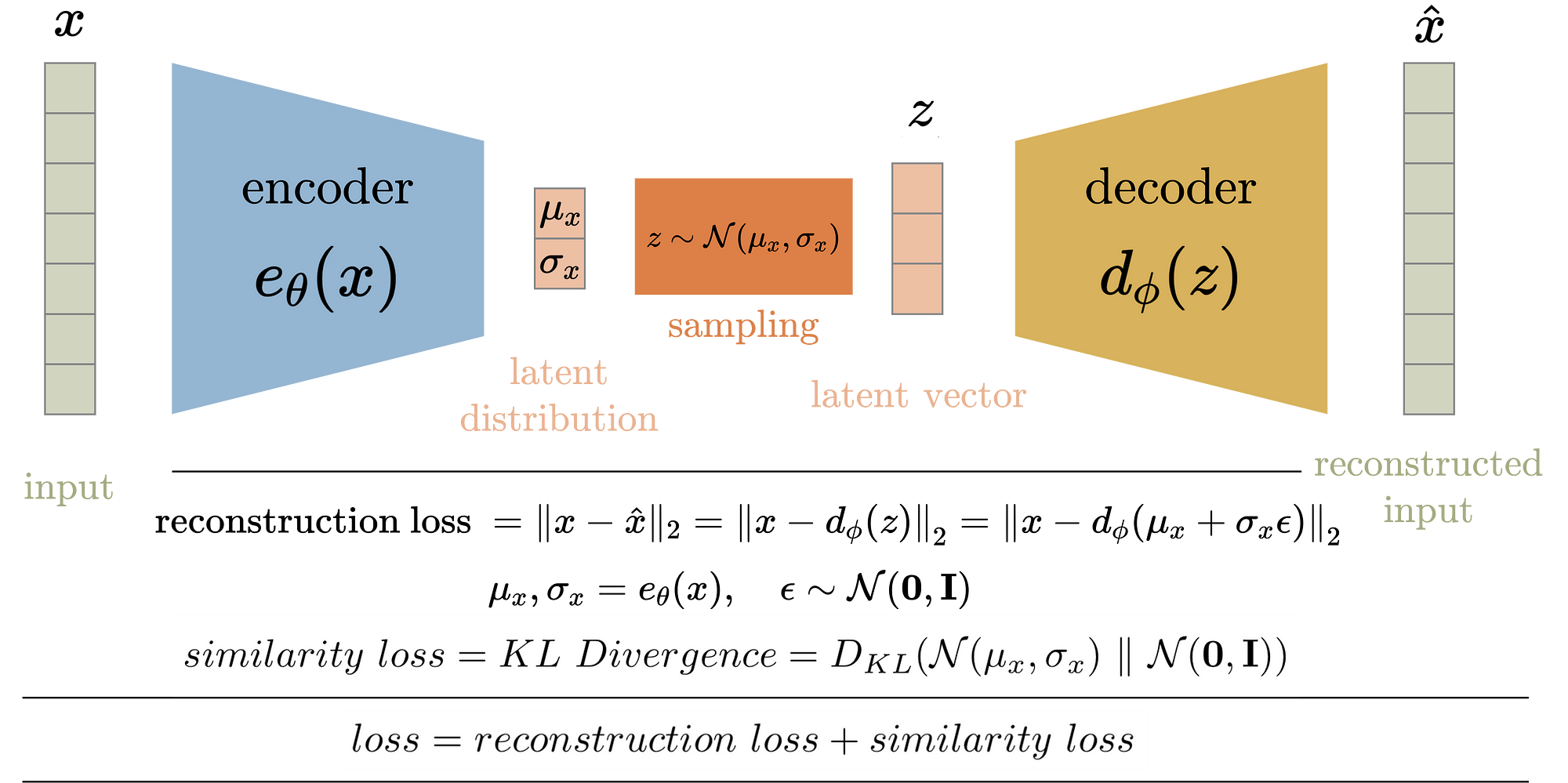
\mathcal{L} = || x - \hat{x} || ^2
Complex
Simple
Variational Auto Encoders
\mathcal{L} = \textrm{max} \, p(x)
Maximizar el likelihood o algo que se le parezca: Variational Inference
p_\theta(x) = \int p_\theta (x|z) p(z) dz
D_\mathrm{KL}(p(x)||q(x)) = \int p(x) \ln \frac{p(x)}{q(x)} dx
No es simetrica!
D_\mathrm{KL}(p(x)||q(x)) \geq 0
La divergencia de Kullback-Leibler (KL):
Distancia entre dos distribuciones de probabilidad

Forward KL
Backward KL
\log p(\boldsymbol{x}) =
\geq \mathbb{E}_{q_{\boldsymbol{\phi}}(\boldsymbol{z}\mid\boldsymbol{x})}\left[\log\frac{p(\boldsymbol{x}, \boldsymbol{z})}{q_{\boldsymbol{\phi}}(\boldsymbol{z}\mid\boldsymbol{x})}\right]
\mathbb{E}_{q_{\boldsymbol{\phi}}(\boldsymbol{z}\mid\boldsymbol{x})}\left[\log\frac{p(\boldsymbol{x}, \boldsymbol{z})}{q_{\boldsymbol{\phi}}(\boldsymbol{z}\mid\boldsymbol{x})}\right] + \mathcal{D}_{\text{KL}}(q_{\boldsymbol{\phi}}(\boldsymbol{z}\mid\boldsymbol{x}) \mid\mid p(\boldsymbol{z}\mid\boldsymbol{x}))
Evidence Lower Bound
(ELBO)
Distancia al posterior real
q_\phi(z|x) \approx p(z|x)
Encontrar
1. ELBO es un lower bound del likelihood
2. Maximizar ELBO = Minimizar KL
Maximizar ELBO maximiza ev/likelihood
Maximizar ELBO para aproximar el posterior
Tutorial 1: Maximizar ELBO para aproximar posteriors en cosmologia


Variational Auto Encoders
\mathcal{L} = \textrm{ELBO} = \langle \log p_\theta(x,z) - \log q_\phi(z) \rangle _{q_\phi(z)}
= \langle \log p_\theta (x|z) \rangle_{q_\phi} - D_\mathrm{KL} (q_\phi(z|x) || p(z))
Reconstruccion (MSE)
Regularizacion
- Continuo puntos cercanos en espacio latente deberian ser cercanos en el espacio de los datos
- Completo cualquier punto sampleado del espacio latente debe llevar a un ejemplo sensible de los datos


arxiv:2008.03833
Variational Auto Encoders en Astro
Tutorial 2: Generar galaxias con VAEs

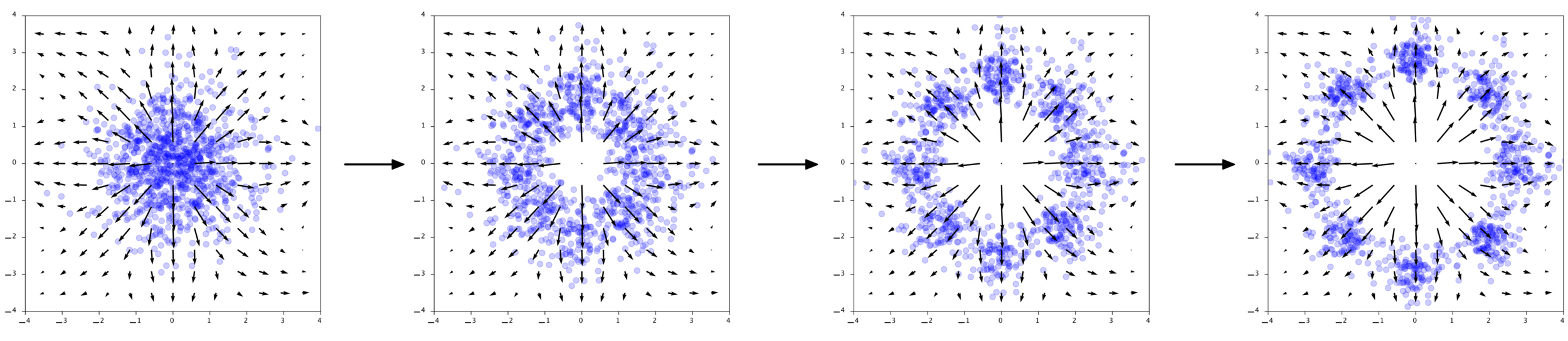
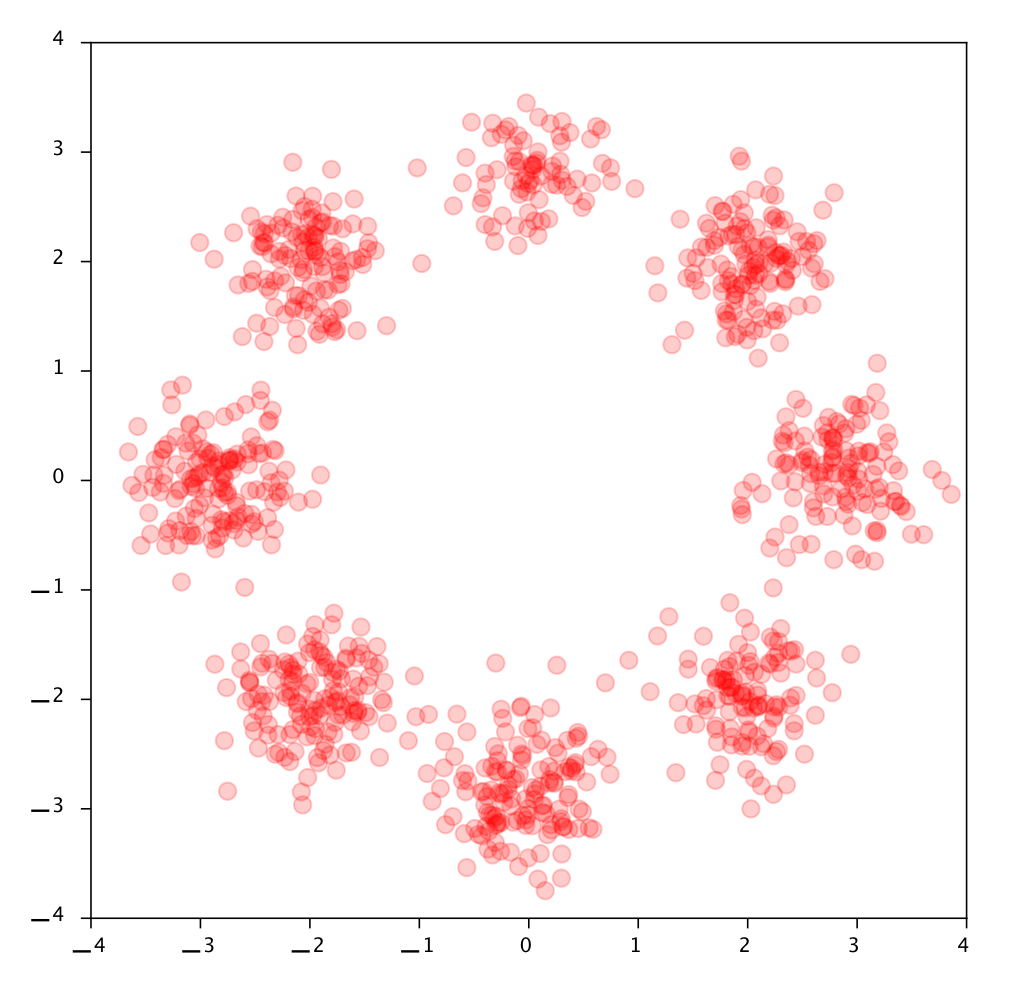
z_T
z_{0}
z_{1}
z_{2}
p(z_{t-1}|z_t)
p(z_t|z_{t-1})
Reverse diffusion: Quitar ruido al paso previo
Forward diffusion: Ruido Gaussian (fijo)
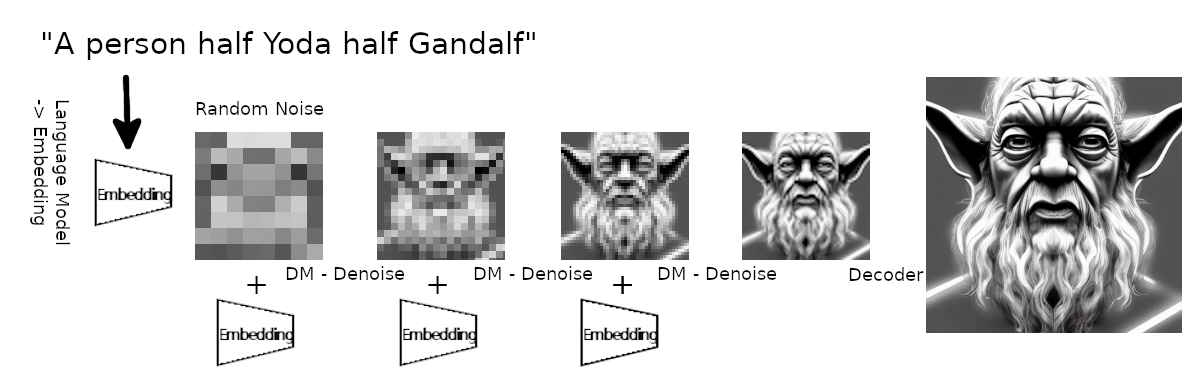
Una persona medio Yoda medio Gandalf
Diffusion models
+ dimensiones(z) = dimensiones(x)
+ encoder fijo: ruido gaussiano
Deep VAE
Diffusion =
Encoder
Ruido Gaussiano
Decoder
(neural network)

z_T
z_{0}
z_{1}
z_{2}
q_\theta(z_{t-1}|z_t)
p(z_t|z_{t-1})
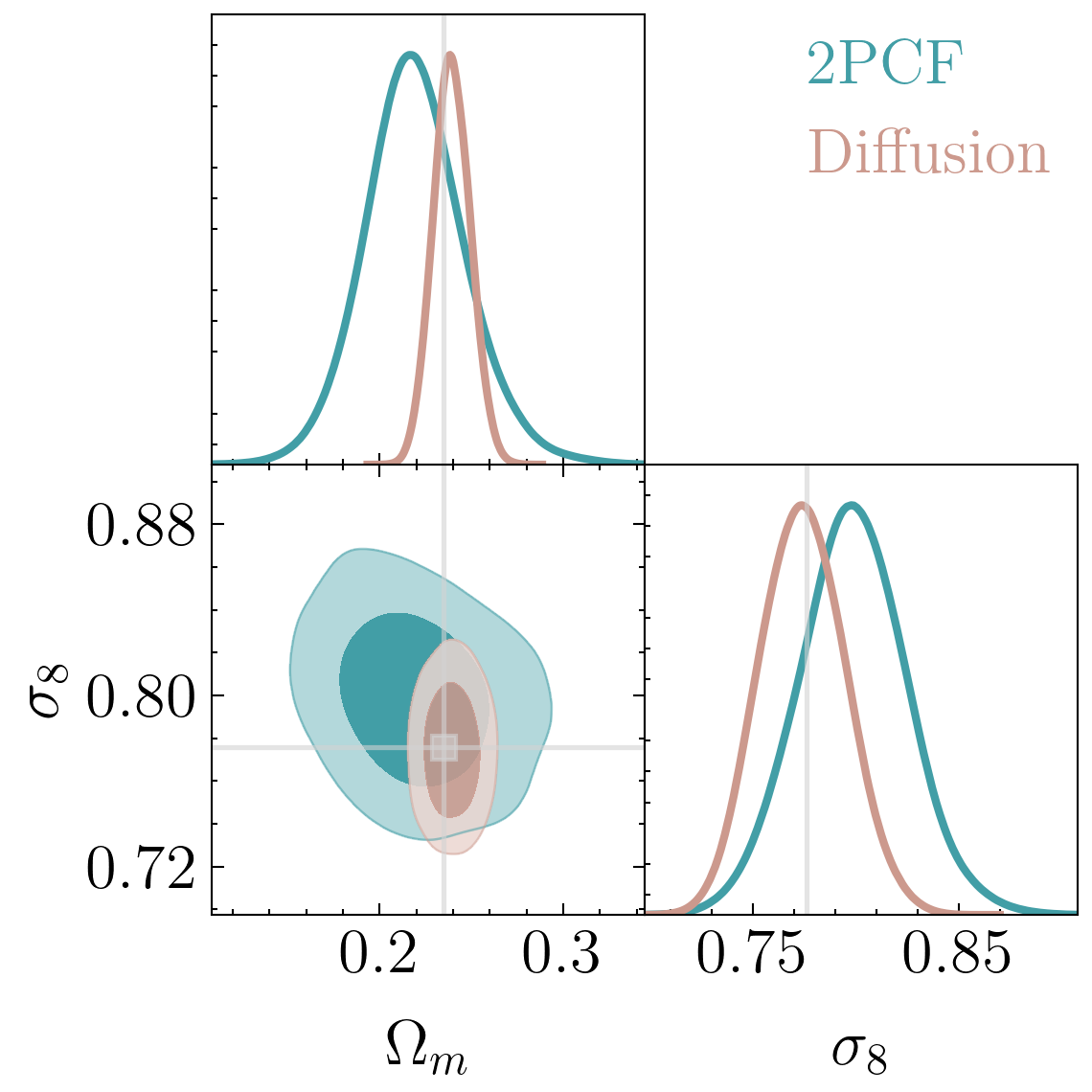
Cosmologia
Diffusion models en cosmologia
Reverse diffusion: Quitar ruido al paso previo
Forward diffusion: Ruido Gaussian (fijo)

arxiv:2104.13478
El zoo de arquitecturas:
déjate llevar por las simetrias
h_0
h_1
h_5
h_4
h_2
h_3
h_6
Propiedades de los nodos (posiciones, velocidades...)
Input
Propiedades galaxias ruidosas
Output
Prediccion del ruido
kNN (~20)
Graph neural networks para predecir el ruido
\mathcal{L}_T(x) = \sum_{i=1}^T \mathbb{E}_{q(z_{i}|x)} D_{KL} \left[q(z_{i-1} | z_{i}, x) || p_\theta(z_{i-1} | z_{i}) \right]

-\log p(x) \leq -\mathrm{VLB}(x)
D_{KL}(q(z_T|x) || p(z_T)) + \mathbb{E}_{q(z_0|x)} \left[-\log p(x|z_0) \right] + \mathcal{L}_T(x)
Prior
Diffusion
Reconstruction
Se un Bayesian de verdad: siempre maximiza el likelihood
arxiv:2107.00630
arxiv:2303.00848
Maximum Likelihood = Denoising
Tutorial 3: Generar jets de partículas con diffusion models

-
Books by Kevin P. Murphy
- Machine learning, a probabilistic perspective
- Probabilistic Machine Learning: advanced topics
- ML4Astro workshop https://ml4astro.github.io/icml2023/
- ProbAI summer school https://github.com/probabilisticai/probai-2023
- IAIFI Summer school
- Blogposts
cuestalz@mit.edu

Modelos Generativos Summer School Latam
By carol cuesta




